ANSYS Workbench接触实例培训
ANSYS Workbench 19.0基础入门与工程实践 第7章 接触分析

3.无摩擦
• 无摩擦接触,即两接触体之间是理想状态。当外力作用时,两接触体可以发生 分离和相对滑动,当两物体分离后,法向作用力减为0,两物体接触滑动时处 于理想状态,不产生摩擦力作用。
4.静摩擦
• 模拟静摩擦的场景,当两物体之间不发生相对滑动但是存在静摩擦力的时候, 可以使用本接触类型进行设置,可以理解为两物体之间的静摩擦力需要多大就 提供多大。
• 7.3.2 几何建模 • 7.3.3 材料属性设置 • 7.3.4 接触设置 • 7.3.5 网格划分 • 7.3.6 载荷及约束设置 • 7.3.7 模型求解 • 7.3.8 结果后处理
7.4 接触分析实例——螺栓连接
• 螺栓连接在接触问题中非常典型,本例将以螺栓连接为对象,详细介绍如何加 载预紧力、设置螺栓连接接触类型等常见技术问题,为读者进行螺栓连接分析 提供指导。
5.摩擦接触
• 通用摩擦接触,既包含静摩擦也包含滑动摩擦,在接触初始时,两接触体是静摩擦状态,当 外界作用力增大且使两接触体发生相对滑动时,此时产生滑动摩擦,滑动摩擦力基于F=计算, 用户在定义该接触类型时需要定义接触面之间的摩擦系数。
6.滑动摩擦
• 直接滑动摩擦接触是指接触体之间不发生静摩擦作用的阶段。该接触类型只针 对刚体动力学分析,系统接触力与法向正压力成正比。
• 支座及底板材质为结构钢材,在WB 19.0中默认即可;螺栓材质选用45号钢,其材料属性参 数:Ε=209000MPa,泊松比μ=0.269。
• 7.4.4 接触设置 • 7.4.5 网格划分 • 7.4.6 载荷及约束设置 • 7.4.7 模型求解 • 7.4.8 结果后处理
7.5 本章小结
• 本章先对接触问题的基本概念和模型进行介绍,让读者对有限元接触有一个概 念性的了解。然后通过两个实例分析,详细介绍如何在WB 19.0中进行含非线 性接触问题的仿真设置和操作,并对WB 19.0中提供的各类接触模型及接触类 型进行逐一讲解,使读者掌握如何选择接触类型、设置接触参数、查看接触产 生的各种结果类型,最终完成整个接触项目的仿真。
ANSYSWorkbench接触分析案例详解
ANSYSWorkbench接触分析案例详解本⽂由Workbench⼩学⽣授权转载这篇⽂章囊括了接触分析中常见的问题,并通过思考和验证,给出了解决⽅案和经验总结,相信朋友们按照这篇教程完整的⾛⼀遍分析过程,会对接触分析的理解更近⼀步。
1.建模。
条件:⼀个圆盘与⼀个矩形板,⽣成壳体。
注意:两者分析之前未接触。
2.选取材料。
进⼊材料库,选取⾮线性材料中的铝合⾦(Aluminum Alloy NL)注意:NL表⽰Nonlinear ,译为⾮线性。
3.进⼊分析模块,调出Properties选项4.修改分析类型,将Analysis type由3D改为2D5.双击Model进⼊分析界⾯,修改矩形板的材料为Aluminum Alloy NL,圆盘默认为结构钢(Structural Steel)6.参数设置(1)根据左侧outline依次向下添加(由于此分析不⽤添加局部坐标系,因此修改完材料属性后,直接添加接触)(2)⼯况:矩形板与圆盘为摩擦接触(也可使⽤⽆摩擦接触,读者可以亲⾃尝试)(3)接触⾯为圆盘外圆周,⽬标⾯为矩形板顶边,设置摩擦系数为0.15(4)由于模型为刚-柔接触,因此修改behavior为⾮对称(Asymmetric)(5)在advanced中将接触算法设置为增⼴拉格朗⽇(Augmented Lagrange)(6)探测⽅法设置为⾼斯点探测(on Gauss point )注意:①由于两者的材料都是⾦属,因此摩擦系数 ≤0.2②⾮线性分析中默认的接触算法为增⼴拉格朗⽇(Augmented Lagrange),线性默认为纯罚函数(Pure penalty)③纯罚函数的收敛性很好,接触刚度对其影响⼤,但是它的穿透性不可控制,⽽增⼴拉格朗⽇收敛性表现为穿透较⼤,迭代次数较多,但其可以在⼀定程度上控制穿透性④⾼斯点与节点探测的区别:⾼斯点:适合⼤多情况,⽹格密度⼩、更精确节点:仅适⽤于⾓接触⑤局部坐标系的添加:如果全局坐标系不是所需要的,就必须添加局部坐标系作为附属坐标系7.划分⽹格(Mesh),选中图中模型,根据模型⾃动划分⽹格8.分析设置(Analysis Setting)(1)打开⾃动时间步(Anto Time Stepping)与⼤变形(Large Deflection)(2)修改载荷⼦步依次为50,50,100后,其他均默认9.添加边界条件(Load or Supports)(1)选中矩形板的下边线,将其设置为Displacement(2)X⽅向数值设置为-15mm,Y⽅向数值设置为0(3)选中圆盘的外圆周,将其设置为Fixed support思考:为什么打开⼤变形开关?答:因为在静⼒学中,极限转动⾓度为10°,⼤位移或者⼤转动即视为⾮线性分析,当受⼒物体的变形与其⼏何尺⼨相⽐较⼤,且线性叠加原理不再适⽤时,可视作⼤变形。
ANSYS Workbench培训课件-接触分析讲义
• Contact is a changing-status nonlinearity: the stiffness of the system depends on the contact status (whether parts are touching or separated).
6
© 2016 ANSYS, Inc.
• Mechanical supports contact relationships with rigid bodies. − Rigid to Rigid − Rigid to Flexible − Useful for improved efficiency when certain Rigid bodies
in the model are considerably stiffer than other Flexible bodies
CONTACT BETWEEN TWO RIGID BODIES
CONTACT BETWEEN ONE RIGID AND ONE FLEXIBLE BODY
5
© 2016 ANSYS, Inc.
SOLID BODY FACE TO
SOLID BODY FACE
4
© 2016 ANSYS, Inc.
June 13, 2016
SURFACE BODY FACE TO
SURFACE BODY FACE
SURFACE BODY EDGE TO
SURFACE BODY FACE
01.01 Contact Technology Review
• Objectives:
ANSYS workbench有限元模拟教程接触分析

第五章控制程序及监控界面的开发控制系统的效率和性能一方面决定于系统的硬件设计,另一方面在很大程度上取决于应用程序的设计质量。
只有将系统的硬件和软件有机的结合在一起,相辅相成,才能使系统最大程度的发挥效率。
软件是计算机控制系统的神经中枢,控制系统中的控制任务最终是靠软件即应用程序的执行来完成的。
因此软件开发占有相当重要的地位,本实验室自控系统是由三大软件支撑的,分别是利用PLC 编程软件STEP7 V5.2,嵌入式组态软件MCGS,以及虚拟仪器Labview7.0所开发的程序。
STEP7基础软件是用于西门子公司SIMATIC S7、SIMATIC C7和SIMATIC WinAC 等控制系统的标准开发软件,主要用于完成控制程序的开发。
本实验室包含的设备种类多、数量大、各设备间关系复杂。
实验室的操作者要全面、综合和有效地监控、操作和管理试验系统并不是件容易的事情,因此还需要设计合理的控制操作界面,本实验室利用MCGS嵌入式组态软件开发出形象的控制界面,并利用其提供的动画功能仿真试验系统的运行状态。
无论是研究性试验还是本科教学试验,都需要采集大量的数据,并需要对这些数据作分析、存储、曲线显示等,因此本试验室采用Labview开发数据采集程序。
因为他们的界面和和操作模仿物理仪器,如示波器和万用表,所以Labview 程序被称作虚拟仪器,。
在Labview中包含了一系列进行采集、分析、显示的工具,能很快的帮助解决复杂数据采集问题。
通过这些软件的应用,可以构造强大的实验室自控系统。
§5.1控制程序方案确定§5.1.1控制算法的选择随着智能控制技术的发展,不断有空调控制算法方面的报道,现已有模糊控制、神经网络控制、自适应控制、解耦控制在变风量空调系统中的应用的思想,但这些研究成果多为仿真结果,在实际应用还用一定的距离,而PID算法控制简单、抗干扰性好、可靠性高等优点[46]。
PID控制是最早发展起来的控制策略之一,由于其算法简单、代码少,可靠性高等优点,使得PID在工程中应用达90%以上。
06 ANSYS13.0 Workbench 结构非线性培训 高级接触解析

• Tolerance Type, Tolerance Value, and Tolerance
Slider: CAD 系统创建的装配体可能没有精确装配, 导致两 体间的接触区域有小的重合或间隙. 可指定接触探测容差 来解决任何的不精确 (只适用于自动接触探测).
4-7
Workbench Mechanical - Advanced Contact
– 如图所示,当前指针位置出现一圆.
图示说明用户定义的接 触探测容差值 CAD 部件间存在的 间隙
4-8
Workbench Mechanical - Advanced Contact
...自动接触探测选项
• 实体和面体间可得到的接触探测类型:
– 面/面: 不同体面间的接触 – 面/边: 不同体的面和边间的接触 – 边/边: 不同体边间的接触
4-6
Workbench Mechanical - Advanced Contact
...自动接触探测选项
Training Manual
• 接触默认设置和自动探测能力对大多接触问题有效. 然而, 可以执行这些额外 控制来放宽分析的接触范围 :
• Generate Contact on Update:若该选型设为Yes ,输入 模型(最新的)时自动创建面/面接触区域. 设置为 „No‟ 仍然 允许手动激活自动生成接触, 或手动构建接触区域.
...自动接触探测选项
Training Manual
• 优先权: 对非常大的模型,接触对的数量有时候是过剩的,特别是当允许多 种接触类型时.
• 209个部件 • 450 个对称接触对 • 115万个自由度
4-10
Workbench Mechanical - Advanced Contact
07 ANSYS13.0 Workbench 结构非线性培训 作业 摩擦接触解析
Contact
Target
WS4B-9
Workbench Mechanical – Structural Nonlinearities
…作业 4B: 摩擦接触
• 确认分析设置
– Large deflection 为 On – 两个载荷步具有不同的自动时间步定义
Workshop Supplement
WS4B-2
Workbench Mechanical – Structural Nonlinearities
…作业 4B: 摩擦接触
步骤:
•
Workshop Supplement
如已在前面的运行中打开了Workbench, 通过 Utility Menu>File>New…启 动新的分析
•
浏览并打开 “W4b-Oring.wbpj” 项目文件.
…作业 4B: 摩擦接触
• 求解. 多次迭代和几个二分后,求解收敛.
Workshop Supplement
WS4B-12
Workbench Mechanical – Structural Nonlinearities
…作业 4B: 摩擦接触
• 查看总变形结果. 观察O-ring几何变形结果动画
Workshop Supplement
– 检验单位是公制 (Tonne,mm,…) 系统. 如果不是, 点击… • Utility Menu=>Units=>Metric(Tonne, mm,…)
WS4B-4
Workbench Mechanical – Structural Nonlinearities
…作业 4B: 摩擦接触
• 回到项目示图区
– “Unit > Metric (mm,kg,N,s,mV,mA)”
Workbench高级工程实例分析培训
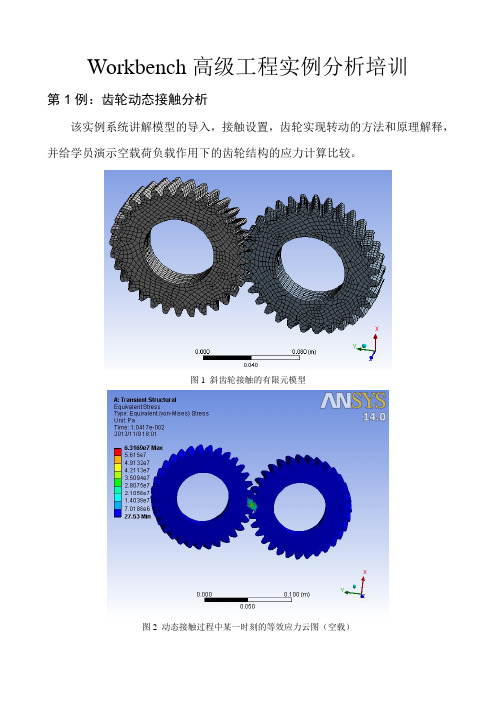
Workbench高级工程实例分析培训第1例:齿轮动态接触分析该实例系统讲解模型的导入,接触设置,齿轮实现转动的方法和原理解释,并给学员演示空载荷负载作用下的齿轮结构的应力计算比较。
图1 斜齿轮接触的有限元模型图2 动态接触过程中某一时刻的等效应力云图(空载)图3 动态接触过程中某一时刻的等效应力云图(负载200N.m)第2例:过盈装配结构分析该实例会系统讲解过盈装配结构的应力分析方法。
不同设置过盈量的计算结果比较和讨论设置过盈量的合理方法,摩擦系数,旋转速度对过盈装配应力的影响。
图4 过盈量为0.00005m时的等效应力(转速=0)图5 过盈量为0.00005m时的接触应力(转速=0)图6 过盈量为0.00005m 时的等效应力(转速=4000) 图7 过盈量为0.00005m 时的接触应力(转速=4000) 第3例:液压阀结构的分析该实例会讲解施加随空间变化的压力载荷和系统分析接触设置对求解的影响,并给出如何合理选取接触参数来实现较为准确的求解。
图8 变化压力载荷分布云图 图9 接触压力云图(摩擦系数=0.1,增强拉格朗日算法)第4例:发动机活塞机构的多体动力学分析该实例会讲解如何为多体设置驱动力和约束多体之间的运动关系的方法,并讲解柔性体的多体动力学分析和刚-柔耦合的多体动力学分析。
图10 0.12s时刻的等效应力云图(柔性体)图11 1.17s时刻的等效应力云图(柔性体)图12 0.12s时刻的等效应力云图(刚-柔耦合)图13 1.17s时刻的等效应力云图(刚-柔耦合)第5例:薄壁结构的非线性屈曲分析该实例会讲解如何在Workbench环境下完成薄壁结构的非线性屈曲分析并获得非线性屈曲载荷的方法,研究不同初始缺陷,弹塑性对非线性屈曲载荷的影响。
图14 线性屈曲1阶屈曲模态云图图15加载23.14%线性屈曲载荷时的位移云图(弹塑性)图16加载33.35%线性屈曲载荷时的位移云图(弹塑性)图17 非线性屈曲分析的位移与求解子步的关系图17加载94.299%线性屈曲载荷时的位移云图(线弹性)图18 非线性屈曲分析的位移与求解子步的关系(线弹性)第6例:盘式制动器热-结构耦合分析该实例为学员系统讲解如何利用Workbench加载方便的优点和ANSYS经典版易容设置求解控制参数的优点联合解决盘式制动器这一类问题,这一实例讲为学员讲解如何为瞬态动力学设置不为0的初始速度,并分别讲解考虑热应力和不考虑热应力的操作方法。
ansys摩擦接触例子
ANSYS Workbench是ANSYS公司开发的一款工程仿真平台,用于进行多物理场仿真分析。
接触分析是其中一种常见的分析类型,它用于研究和评估两个或多个物体之间的接触行为和力学响应。
下面将详细解释ANSYS Workbench中接触分析的案例步骤:1. 构建几何模型:使用ANSYS DesignModeler或其他CAD软件,创建需要进行接触分析的物体的几何模型,包括接触面和接触区域。
2. 导入模型:将几何模型导入到ANSYS Workbench中,可以使用File > Import或直接将文件拖放到工作区。
3. 定义材料属性:选择需要定义的材料,在ANSYS Mechanical中,可以使用材料库中的材料或自定义材料属性。
4. 定义接触区域:选择接触区域,在Geometry中选择面或体,然后将其分配为接触区域。
可以设置摩擦系数和接触刚度等接触属性。
5. 定义加载:定义加载条件,如力、压力或位移。
可以在Loads下的各个选项卡中定义加载类型、大小和方向等。
6. 设置分析类型:选择需要进行的接触分析类型,在ANSYS Mechanical中,可以选择非线性接触分析或线性接触分析,根据具体情况选择适当的分析类型。
7. 设置求解器选项:在Solver Settings中设置求解器选项,如收敛准则、迭代次数和网格参数等。
8. 网格划分:进行网格划分,确保适当的网格密度和质量,可以使用ANSYS Meshing 或其他网格划分工具。
9. 求解和后处理:运行求解器进行接触分析,并等待求解完成。
完成后,可以使用ANSYS Mechanical中的后处理工具进行结果分析和展示。
10. 结果分析:根据需要,对接触分析的结果进行分析和评估,如接触变形、压力分布、接触压力、挤压量等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 本章描述的性能通常适用于ANSYS Structural 或以上的license
3-2
Workbench Mechanical - Introduction to Contact
Workbench Mechanical - Introduction to Contact
... 接触公式
Training Manual
• 另外值得一提的是算法不同,接触探测不同:
– Pure Penalty 和 Augmented Lagrange 公式使用积分点探测. 这导致更多的探 测点。(在左侧的例子中有10个)
... 接触公式
Training Manual
• 对于特定的“绑定”和“不分离”两个面间的接触类型,可用多点约束
(MPC) 算法.
– MPC 内部添加约束方程来“联结”接触面间的位移 – 这种方法不基于罚函数法或Lagrange乘子法 .它是直接处理绑定接触接触区域
相关接触面的方式。
– MPC算法支持大变形效应
– 两种方法都是基于罚函数方程:
Training Manual
F k x normal
normal penetration
– 这里对于一个有限的接触力 Fnormal, 存在一个接触刚度的knormal的概念,接触刚 度越高,穿透 量 xpenetration越小,如下图所示
– 对于理想无限大的knormal , 零穿透. 但对于罚函数法,这在数值计算中是不可能 ,但是只要xpenetration 足够小或可忽略,求解的结果就是精确的。
A. 基本概念
Training Manual
接触:
• 两独立表面相互接触并相切,则称之为接触.
• 一般物理意义上, 接触的表面包含如下特性:
– 不会渗透.
– 可传递法向压缩力和切向摩擦力.
– 通常不传递法向拉伸力.
• 可自由分离和互相移动.
• 接触是状态改变非线性. 也就是说, 系统刚度取决于接触状态, 即part之间是 接触或分离.
F
3-7
Workbench Mechanical - Introduction to Contact
... 接触公式
Training Manual
• 使用Normal Lagrange方法会出现接触扰动
– 如果不允许渗透 (左图), 在Gap为0处,无法判断接触状态是开放或闭合 (如阶跃 函数). 有时这导致收敛变得更加困难,因为接触点总是在open/closed中间来 回振荡,这就称为接触扰动(chattering)
– 如果允许一个微小的渗透 (右图), 收敛变得更加容易,因为接触状态不再是一个 阶跃变化.
Contact Status Open
Penetration
Gap
Contact Status Open
Penetration
Gap
Closed 法向拉格朗日法
Closed
Penetration
罚函数法
3-8
normal penetration
增强拉格朗日法:
F k x normal
normal penetration
• 因为额外因子 , 增强的 Lagrange 方法对于罚刚度knormal 的值变得
不敏感
3-6
Workbench Mechanical - Introduction to Contact
– Normal Lagrange 和 MPC 公式使用节点探测 (目标法向). 这导致更少的探测点。 (在右侧的例子中有6个)
– 节点探测在处理边接触时会稍微好一些,但是,通过局部网格细化,积分点探 测也会达到同样的效果
积分点探测
节点探测
3-9
Workbench Mechanical - Introduction to Contact
... 接触公式
Training Manual
• 另外可利用方法是拉格朗日乘子公式:
– 增强拉格朗日方法增加了额外的自由度(接触压力)来满足接触协调性. 因此, 接
触力 (接触压力) 作为一额外自由度直接求解,而不通过接触刚度和穿透计算得
到。
Fnormal DOF
• 此方法可以得到0或接近0的穿透量 • 不需要压力自由度法向接触刚度(零弹性滑动) • 需要直接求解器,这要消耗更多的计算代价
3-10
Workbench Mechanical - Introduction to Contact
… 切向行为
Training Manual
• 前面所提到的选项是针对法向接触的. 如果定义了“friction” 或 “rough/bonded”
– Workbench Mechanical提供几种不同接触公式来在接触界面强制协调性.
Contact
F
当接触协调性不被强制时会发生渗透.
Target
F
3-4
Workbench Mechanical - Introduction to Contact
B. 接触公式
• 对非线性实体表接触, 可使用罚函数或增强拉格朗日公式:
Fn
xp
3-5
Workbench Mechanical - Introduction to Contact
... 接触公式
Training Manual
• Pure Penalty 和Augmented Lagrange 方法的区别就是后者加大了 接触力(压力)normal
第三章 接触简介
Workbench – Mechanical 结构非线性
3-1
Workbench Mechanical - Introduction to Contact
章节概述
Training Manual
• 本章介绍实体接触: – 假定用户在这章前已掌握第2章非线性结构.
• 介绍的具体课题是:
3-3
Workbench Mechanical - Introduction to Contact
... 基本概念
Training Manual
接触区域如何计算:
• 物理上,接触体间不相互渗透. 因此, 程序必须建立两表面间的相互关系以 阻止分析中的相互穿透.
– 程序阻止渗透, 称为强制接触协调性.