差分器件的参数检测
差分电路测试方案
差分电路测试方案
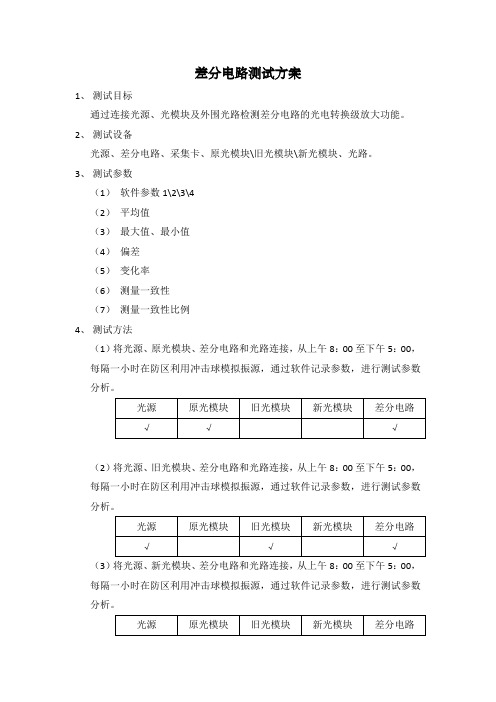
1、测试目标
通过连接光源、光模块及外围光路检测差分电路的光电转换级放大功能。
2、测试设备
光源、差分电路、采集卡、原光模块\旧光模块\新光模块、光路。
3、测试参数
(1)软件参数1\2\3\4
(2)平均值
(3)最大值、最小值
(4)偏差
(5)变化率
(6)测量一致性
(7)测量一致性比例
4、测试方法
(1)将光源、原光模块、差分电路和光路连接,从上午8:00至下午5:00,每隔一小时在防区利用冲击球模拟振源,通过软件记录参数,进行测试参数分析。
(2)将光源、旧光模块、差分电路和光路连接,从上午8:00至下午5:00,每隔一小时在防区利用冲击球模拟振源,通过软件记录参数,进行测试参数分析。
(3)将光源、新光模块、差分电路和光路连接,从上午8:00至下午5:00,每隔一小时在防区利用冲击球模拟振源,通过软件记录参数,进行测试参数分析。
5、工作步骤
(1)按照测试方法测试数据,填写测试报告。
(2)设计差分电路测试电路板
(3)采购设备器件。
AD_8362检测器详细介绍——中文版
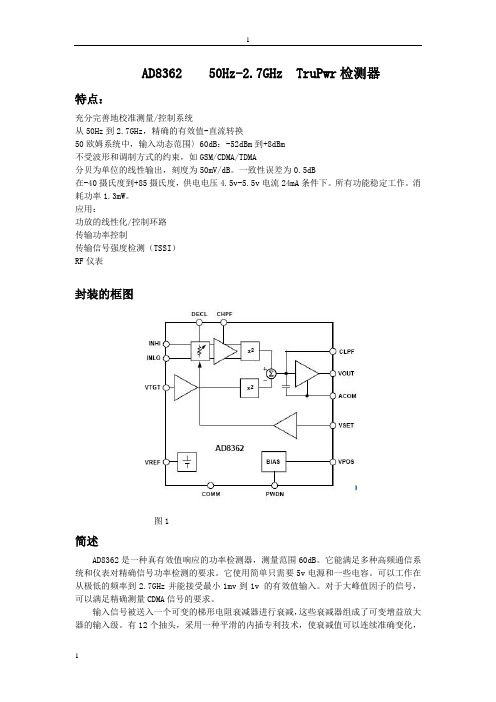
AD8362 50Hz-2.7GHz TruPwr检测器特点:充分完善地校准测量/控制系统从50Hz到2.7GHz,精确的有效值-直流转换50欧姆系统中,输入动态范围〉60dB:-52dBm到+8dBm不受波形和调制方式的约束,如GSM/CDMA/TDMA分贝为单位的线性输出,刻度为50mV/dB。
一致性误差为0.5dB在-40摄氏度到+85摄氏度,供电电压4.5v-5.5v电流24mA条件下。
所有功能稳定工作。
消耗功率1.3mW。
应用:功放的线性化/控制环路传输功率控制传输信号强度检测(TSSI)RF仪表封装的框图图1简述AD8362是一种真有效值响应的功率检测器,测量范围60dB。
它能满足多种高频通信系统和仪表对精确信号功率检测的要求。
它使用简单只需要5v电源和一些电容。
可以工作在从极低的频率到2.7GHz并能接受最小1mv到1v 的有效值输入。
对于大峰值因子的信号,可以满足精确测量CDMA信号的要求。
输入信号被送入一个可变的梯形电阻衰减器进行衰减,这些衰减器组成了可变增益放大器的输入级。
有12个抽头,采用一种平滑的内插专利技术,使衰减值可以连续准确变化,衰减值的设定由“VSET”脚的电压控制。
衰减后的信号送到一个高性能的宽带放大器进行放大。
再由一个宽带的平方律检波器检波,检波输出的脉动信号经滤波后 与另一个平方电路的输出进行比较。
这个平方电路的输入由“VTGT”脚提供,它是一个固定的直流电压,通常与提供精确1.25V 参考电压的VREF 脚相连。
两个平方电路的输出信号差分输入到高增益误差放大器后,将从“VOUT”脚通过线-线输出一个电压信号。
在控制模式下,低噪声的输出信号可用于改变系统RF 放大器的增益,从而平衡输入信号功率。
用于做功率测量器件时,VOUT 和VSET 直接相连。
输出与输入信号的有效值的对数成正比。
因而读数可以直接用dB 表示,刻度为每十个刻度为1v 或者说斜率50mv/dB 。
2dpsk差分检测原理
2dpsk差分检测原理2DPSK(2-Differential Phase Shift Keying)是一种数字调制技术,它利用相位的差异来传输信息。
2DPSK差分检测原理是通过对接收信号的相位差做差分运算,来还原发送信号的相位信息。
下面将详细介绍2DPSK差分检测原理。
在2DPSK中,发送信号可以用两个相位表示,通常被定义为0°和180°。
接收信号在传输过程中受到了信道引起的各种干扰和失真,导致信号的相位差发生改变。
通过相位差的变化来传达信息,是2DPSK的一个重要特点。
但是,由于信道噪声的存在,接收信号的相位差会与发送信号的相位差产生一些偏离。
为了对接收信号的相位差进行差分检测,首先需要将接收信号进行采样和定时同步处理。
然后,采用相关器对接收信号进行处理。
相关器将接收信号与本地载波相乘,并对所得的积分值进行判决。
判决结果可用于判断接收信号相位差是否发生变化,并据此还原发送信号的相位信息。
具体来说,差分检测原理可以分为以下几个步骤:1.采样和定时同步:接收到的连续信号需要进行离散化处理,一般通过采样来完成。
采样后的信号被用来检测接收信号的相位差。
同时,还需要对接收信号进行定时同步,以确保采样时机与发送信号的相位变化一致。
2.相关器:相关器的作用是将接收信号与本地载波进行乘法操作。
这样可以提取出接收信号的相位差。
相关器输出的结果是一系列的积分值。
3.判决:对相关器的输出进行判决,以确定接收信号相位差是否发生了变化。
通常,可以通过设置一个阈值来进行判决。
如果积分值超过阈值,则判定相位差发生了变化。
4.差分运算:如果判决结果发现相位差发生了变化,那么还需要进行差分运算。
差分运算是通过将当前判决结果与前一个判决结果进行异或操作来完成的。
这样可以消除信道噪声的影响,还原出被传输信息的相位。
5.解调:在差分运算之后,可以利用还原的相位信息来进行解调,从而得到传输的原始信息。
通过以上的差分检测原理,2DPSK可以在信道噪声的影响下,有效地还原出发送信号的相位信息。
差分线s参数
差分线 s 参数引言什么是差分线 s 参数?差分线 s 参数是用来描述微波器件或传输线性能的一种参数。
它用于表征器件或线路的传输特性,包括传输损耗、相位延迟等。
差分线 s 参数的作用差分线 s 参数在微波电路设计和测量中起着重要的作用,它可以帮助工程师们了解和评估线路性能,指导线路设计和优化。
基本概念差分线与单端线的区别差分线和单端线是微波传输线中常用的两种线路结构。
差分线由两个平行的导线组成,而单端线只有一个导线。
差分线中的两个导线分别为正导线和负导线,它们具有相同的幅度但方向相反。
而单端线中只有一个导线,不具备差分信号传输的特性。
差分线的优点差分线具有抗干扰能力强、传播损耗低、抗串扰能力强等优点。
这使得差分线在高速数据传输、抗干扰要求高的场合得到广泛应用。
差分线参数s 参数的定义差分线的 s 参数是指差分信号的输入与输出之间的关系。
它是一个复数,包括传输损耗和相位延迟两个部分。
s 参数可以通过测量差分信号的输入和输出,在频域或时间域中计算得出。
s 参数的表达式对于差分线来说,s 参数可以通过如下的矩阵形式表示:[s11 s12][s21 s22]其中,s11 是指输入差分信号的一对导线之间的反射系数;s12 是指输入差分信号的一对导线中一个导线上的信号传输到另一个导线上的传输系数;s21 是指输出差分信号的一对导线中一个导线上的信号传输到另一个导线上的传输系数;s22 是指输出差分信号的一对导线之间的反射系数。
s 参数的测量测量差分线的 s 参数可以采用多种方法,常用的包括矩阵分析法、双端法和单端法等。
矩阵分析法是通过测量差分线的输入和输出信号,利用矩阵运算得出 s 参数。
这种方法需要使用特殊设备进行测量,并进行计算。
双端法是通过同时测量差分线的正导线和负导线的电压或电流,计算得出 s 参数。
这种方法只需要一台普通的示波器和一根探针即可完成测量。
单端法是通过测量差分线的正导线或负导线的电压或电流,利用推导关系计算得出差分模式和共模模式的 s 参数。
差分对管的检测方法

差分对管的检测方法
差分对管的检测方法
差分对管是把两只性能一致的晶体管封装成一体的半导体器件。
它能以最简方式构成性能优良的差分放大器,经常用于仪器、仪表的输入极和前置放大极。
差分对管有两种结构形式,一种是硅高频小功率差分对管,典型产品有
3CSG3,ECM1A等;另一种是硅小功率差分对管,国产型号有3DG06A-O6D。
用万用表检测差分对管的主要内容有:(1)识别电极;(2)判断属于PNP 型,还是NPN型;(3)估测放大能力;(4)比较两只配对管参数的一致性。
其中。
(1)(3)项与普通晶体管的情况相同,不再赘述。
只有第(4)项为新
增加的测量项目。
注意事项:(1)检测差分对管时应选择万用表的档。
这是因为差分对管的
正常工作电压较高,否则电流增益上不去。
档的电池电压太低,即使接上偏置电阻,也不容易使管子进入放大区,因而测不出值。
(2)因档提供的测试电流很小,故只能估测差分对管的放大能力,进行相对比较。
如果按式计算值,会比典型值偏低许多。
(3)测差分对管时,应交换两支表笔的位置。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
差分检测算法

差分检测算法
差分检测算法是一种常用的数据分析方法,它可以用来检测数据中的
异常值或变化点。
该算法的基本思想是将相邻数据之间的差值进行计算,然后通过比较差值的大小来判断数据是否发生了异常变化。
差分检测算法的具体实现步骤如下:
1. 将原始数据按照时间顺序排列,并计算相邻数据之间的差值。
2. 计算差值的平均值和标准差,用于判断数据是否发生了异常变化。
3. 对于每个数据点,计算它与前面若干个数据点的差值平均值和标准差,用于判断该数据点是否为异常值或变化点。
4. 根据差值的大小和标准差的倍数来判断数据是否为异常值或变化点。
差分检测算法的优点是简单易懂,可以快速检测数据中的异常值或变
化点。
它适用于各种类型的数据,包括时间序列数据、图像数据、声
音数据等。
此外,差分检测算法还可以与其他数据分析方法结合使用,如聚类分析、回归分析等,以提高数据分析的准确性和效率。
然而,差分检测算法也存在一些缺点。
首先,它对数据的要求比较高,需要满足数据之间的差值具有一定的规律性。
其次,差分检测算法容
易受到噪声的影响,需要对数据进行平滑处理或采用其他方法来降低
噪声的影响。
最后,差分检测算法只能检测数据中的异常值或变化点,无法对数据进行预测或分类。
总之,差分检测算法是一种简单有效的数据分析方法,可以用于检测
数据中的异常值或变化点。
它适用于各种类型的数据,但也存在一些
缺点需要注意。
在实际应用中,需要根据具体情况选择合适的数据分
析方法,以提高数据分析的准确性和效率。
中心抽头差分电感的等效模型和参数提取
维普资讯
第1 2期
卢 磊等 : 中心抽头差分 电感 的等效模型和参数提取
间 的互感 作用 可 以等 效 为两 个 受 控 电压 源 . 由基 尔 霍夫 电压 定律 可得
j ll—j ( a 2= “ Mi l () 1 j 1+j 2 0 a Mi ( 2= i () 2 因为 差分 电感左 右 完 全 对 称 , L。 则 =L。 =L, 解 求 ( ) 2 式得 1 和( )
r — — — —
zl i I
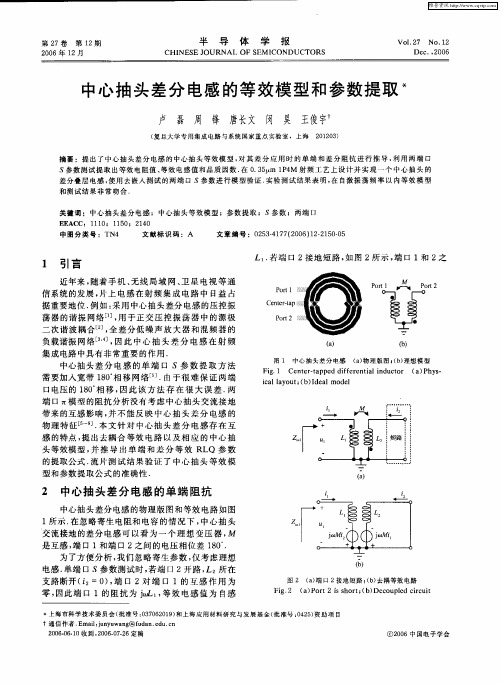
交流 接地 的差分 电感 可 以看 为一 个 理 想 变压 器 , M 是互感 , 口 1和端 口 2之 间的 电压相 位差 1 0 . 端 8。
为了方 便分 析 , 们忽 略寄生 参数 , 我 仅考 虑理 想 电感 . 单端 口 参 数测 试时 , 端 口 2开路 , 所 在 若 L 支路 断开 ( 。 ) 端 口 2对 端 口 1的互 感 作 用 为 j =0 , 零, 因此 端 1 1的 阻抗 为 j , 效 电感 值 为 自感 : 3 c 等 止
…
带来 的互感 影 响 , 不 能反 映 中心 抽 头差 分 电感 的 并 物理 特 征_ . 文 针 对 中心 抽 头 差 分 电感 存 在 互 5 本 卅] 感 的特点 , 出去耦 合 等效 电路 以 及相 应 的 中心 抽 提 头等 效模型 , 推 导 出单 端 和 差 分 等 效 RL 参 数 并 Q
一
文 献 E ] 出 了利 用 单 端 E S参 数 提取 电感 单 6给 l 端 阻抗 的方 法 , 测试 出 。参 数 , 用 反 射 系 数 的公 。 利
Lt 若端口2 接地短路, 如图2 所示, 和 2 端口 之
&
●
~ 印
hfss差分线s参数
hfss差分线s参数HFSS(High Frequency Structure Simulator)是一种电磁场仿真软件,可以用于分析和设计微波器件和天线等高频电磁器件。
在HFSS中,差分线是一种常见的传输线结构,用于高速数字通信和射频应用中。
本文将介绍差分线的S参数分析方法及其在高频电磁器件设计中的应用。
一、差分线的概述差分线是由两条等长且等宽的导线组成的传输线结构。
两条导线之间保持恒定的间距,且两条导线的电流方向相反。
差分线的特点是抗干扰能力强,传输信号质量稳定,因此在高速数字通信和射频应用中得到广泛应用。
二、差分线的S参数分析方法S参数是指散射参数(Scattering parameters),用于描述电路中各个端口之间的功率传输关系。
在HFSS中,可以通过S参数分析来研究差分线的性能。
1. S参数的定义对于差分线结构,可以定义四个S参数,分别是S11、S21、S12和S22。
其中,S11表示输入端口的反射系数,即输入信号被反射回来的程度;S21表示输入信号经过差分线传输后到达输出端口的程度;S12表示输出端口的反射系数;S22表示输出信号被反射回来的程度。
2. S参数的测量在HFSS中,可以使用参数扫描功能来分析差分线的S参数。
首先,需要定义一个频率范围和步进,然后设置好输入和输出端口的参数。
接下来,HFSS会自动计算出每个频率点上的S参数,并以图表或数据表的形式呈现出来。
三、差分线的应用差分线在高频电磁器件设计中有着广泛的应用,主要体现在以下几个方面:1. 信号传输差分线可以用于高速数字通信中的数据传输。
由于差分线具有抗干扰能力强的特点,可以有效降低信号传输过程中的串扰和噪声干扰,提高信号质量和传输速率。
2. 器件连接在微波器件和射频电路中,差分线常用于连接各个功能模块。
通过差分线的连接,可以实现信号的相互转换和耦合,提高整个系统的性能和稳定性。
3. 抗干扰设计差分线在抗干扰设计中起到了重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5
Sources of Measurement Deficiencies
• TDR’s Use A Scalar Calibration Technique • Wideband Front-End in ‘Scope Limits Its Dynamic Range
Page 6
A TDR is a commonly used instrument for testing components such as transmission lines and interconnects. These instruments perform well up to some speed, but eventually their accuracy and dynamic range render them useless. The calibration technique for TDR’s is a scalar approach that correct the response of the system, but not the sources of measurement error. High speed front-ends on oscilloscopes must have very wide bandwidths to be able to follow a fast signal. However, wideband front-ends contain a large noise power. Therefore, the faster the TDR system, generally the poorer its dynamic range.
Page 4
Balanced circuits have been used for many years because of their desirable performance characteristics. They have been mostly used in lower frequency analog circuitry and digital devices, and much less so in RF and microwave applications. One benefit of differential circuits is that they have good immunity from many sources of noise such as that from power supplies, adjacent circuitry, and other external sources that are coupled either electrically or electromagnetically. These noise sources tend to couple in the common-mode, and therefore cancel in differential mode. Cancellation also occurs at even-harmonic frequencies since signals that are anti-phase at the fundamental frequency are in-phase at the even harmonics. The quality of the virtual ground in a differential circuit is independent of the physical ground path. Therefore, differential devices can tolerate poor RF grounds better than unbalanced devices.
Page 5
The demand for higher speed / higher bandwidth communication systems is seemingly insatiable. As data rates become higher, and more importantly, as rise time become faster, these high speed signals become microwave in nature. This means that distributed effects become very important, and parasitic elements become increasingly significant. As a result, it is increasingly important to reconsider the design and measurement techniques that are used. What sources of error are present in the measurements? What assumptions are inherent in the techniques being used? There is a large body of knowledge in dealing with signals of such a high frequency. Applying microwave design and measurement techniques to traditional digital techniques can provide solutions for the development of the next generation of high speed devices.
3
Performance Attributes of Differential Circuits
• Noise Immunity from: – Power Supplies – Hash from Adjacent Circuits – External EMI • Even-Order Harmonic Suppression • RF Grounding Quality Less Critical
Page 2
This paper on balanced device characterization will cover the following topics: First we will review the characteristics of balanced devices to understand why they are used, and how frequency-domain measurements can be applied. After that we will look at commonly used techniques for measuring these devices and their advantages and disadvantages. Next we will consider a way of describing the behavior of balanced devices, and how this relates to a design methodology. A system for characterizing balanced devices has been developed and will be briefly described. Finally, before concluding, examples of measurements on balanced transmission lines will be discussed, and a variety of ways of representing the data will be shown.
Page 3
An unbalanced, or single-ended, device has all of its signals referenced to a common ground potential. A balanced device, by comparison, is composed of two nominally identical halves. Practically speaking, the signals on each side of the device can have any relative amplitude and phase relationship, but they can be decomposed into a differential-mode (anti-phase) component, and a common-mode (inphase) component. A balanced circuit operating in common-mode has no performance advantages over a single-ended circuit. The advantages of this topology come from operating the device in differential mode. When a device is driven differentially, a virtual ground is established along its axis of symmetry. At the virtual ground, the potential at the operating frequency does not change with time regardless of the signal amplitude.
1
Outline
• Differential Devices • Statement of Problem • Unbalanced and Balanced Performance Parameters • System Implementation • Measurement Examples • Conclusion