注塑机控制系统概述
注塑机电气控制系统
注塑机电气控制系统第一节 概述注塑机控制系统是一套以控制器为控制核心,包括各种电器、电子元件、仪表、加热器、传感器等组成,与液压系统配合,正确实现注塑机的压力、温度、速度、时间等各工艺过程以及调模、手动、半自动、全自动等各程序动作的系统设备。
控制系统在注塑机中以独立部分而存在。
第一节 注塑机工作原理一、注塑机工作原理 注塑成型机简称注塑机,其机械部分主要由注塑部件和合模部件组成。
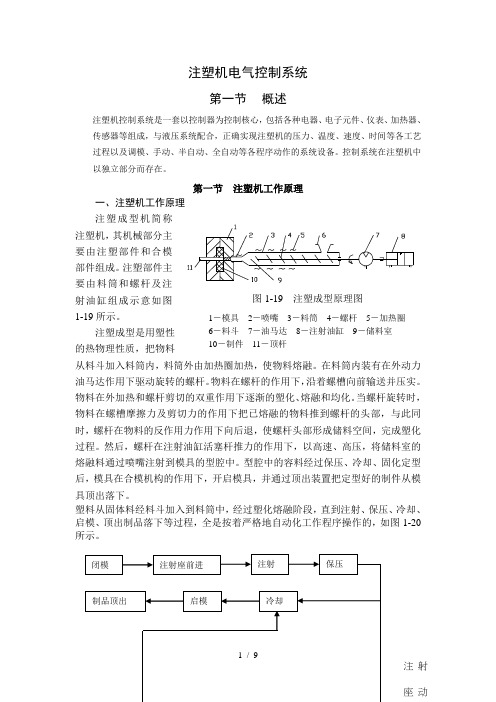
注塑部件主要由料筒和螺杆及注射油缸组成示意如图1-19所示。
注塑成型是用塑性 的热物理性质,把物料从料斗加入料筒内,料筒外由加热圈加热,使物料熔融。
在料筒内装有在外动力油马达作用下驱动旋转的螺杆。
物料在螺杆的作用下,沿着螺槽向前输送并压实。
物料在外加热和螺杆剪切的双重作用下逐渐的塑化、熔融和均化。
当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用力作用下向后退,使螺杆头部形成储料空间,完成塑化过程。
然后,螺杆在注射油缸活塞杆推力的作用下,以高速、高压,将储料室的熔融料通过喷嘴注射到模具的型腔中。
型腔中的容料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制件从模具顶出落下。
塑料从固体料经料斗加入到料筒中,经过塑化熔融阶段,直到注射、保压、冷却、启模、顶出制品落下等过程,全是按着严格地自动化工作程序操作的,如图1-20所示。
1-模具 2-喷嘴 3-料筒 4-螺杆 5-加热圈6-料斗 7-油马达 8-注射油缸 9-储料室 10-制件 11-顶杆图1-19 注塑成型原理图第二节注塑机组成注塑机根据注塑成型工艺要求是一个机电一体化很强的机种,主要由注塑部件、合模部件、机身、液压系统、加热系统、冷却系统、电气控制系统、加料装置等组成,如图1-21所示。
注塑机注塑部件塑化装置注射座注射油缸螺杆驱动装置注射座油缸螺杆料筒螺杆头喷嘴合模部件合模装置调模装置制品顶出装置机身液压系统泵、油马达、阀蓄能器、冷却器、过滤装置管路、压力表冷却系统入料口冷却、模具冷却润滑系统润滑装置、分配器电器控制系统动作程序控制;料筒温度控制;泵电机控制安全保护;故障监测、报警;显示系统机械手加料装置图1-21注塑机组成示图图1-20注塑机工作程序框图从控制系统的质量将直接影响产品的成型质量,例如对合模速度、低压模保、及模具锁紧力的控制,将影响产品的成型周期、可靠的低压模保(模具保护)、准确的开模定位等等。
基于plc的注塑机控制系统设计

目录摘要 (Ⅰ)第一章注塑机简介 (1)1.1 注塑机的发展趋势 (1)1.2 注塑机的使用 (1)1.3 注塑机的工作过程 (2)第二章可编程控制器简介 (3)2.1 PLC的基本特点 (3)2.2 PLC机型及I/O点数的选择 (3)2.2.1 PLC机型的选择 (3)2.2.2 PLC的I/O点数的选择 (4)第三章 S-2Y-250A型注塑机的设计 (5)3.1 注塑机控制系统的主电路图 (5)3.2 XS-2Y-250A型注塑机工作流程 (6)3.2.1 PLC程序的顺序控制设计法 (6)3.2.2 顺序控制设计法的设计步骤 (7)3.3 注塑机控制系统的输入输出分配表 (8)3.4 注塑机控制系统的语句表 (10)3.5 注塑机控制系统的梯形图 (12)结束语 (18)参考文献 (19)摘要注塑机控制系统是注塑机整机的一个重要组成部分,其性能优劣对整机至关重要。
本论文主要阐述了XS-ZY-250A型注塑机的机电系统控制问题。
采用PLC来实现对注塑机各动作的控制。
确定了PLC输入和输出接口的属性,将注塑机的所有检测开关、限位开关、手动操作开关和主令开关等,进行确切地分类和编号,从而确定了I/O口的数量。
根据输入输出的数量、类型确定PLC的型号为西门子S7-200型。
软件设计方面,根据注塑机各个动作制出注塑机的工艺流程图。
根据此工艺流程图,设计出注塑机的动作流程图,根据动作流程图写出注塑机的状态转移图,并依据状态转移图写出步进梯形图,实现注塑机动作程序控制,将模糊控制等先进控制理论应用到注塑机料筒温度控制中,并在注塑机全电气化方面作了一些有益的尝试。
关键词:注塑机;PLC;自动控制系统第一章注塑机简介1.1注塑机的发展趋势注塑机是注塑成型的主设备,注塑机的技术参数和性能与塑料性质和注塑成型工艺有着密切的关系。
注塑成型设备的进一步完善和发展必将推动注塑成型技术的进步,为注塑制品的开发和应用创造条件。
注塑机计算机控制系统技术条件
注塑机计算机控制系统技术条件注塑机计算机控制系统是指利用计算机技术对注塑机进行全面控制和管理的系统。
现代注塑机计算机控制系统技术已经得到了广泛应用,大大提高了注塑机的生产效率和产品质量。
以下是注塑机计算机控制系统的技术条件介绍。
1.数据采集和处理能力:注塑机计算机控制系统需要能够实时、准确地采集和处理各种数据,包括温度、压力、流量、速度等。
2.高精度的测量和控制技术:注塑机计算机控制系统需要具备高精度的测量和控制技术,能够实时检测和调整注塑机各部件的状态和参数,确保注塑过程的稳定性和一致性。
3.全面的参数监控和报警功能:注塑机计算机控制系统需要具备全面的参数监控和报警功能,能够及时发现并报警异常情况,保障生产的安全和稳定。
4.智能化的操作界面:注塑机计算机控制系统需要拥有智能化的操作界面,能够简化操作流程,提高操作效率,并能够进行参数设置和历史数据查询。
5.数据存储和分析功能:注塑机计算机控制系统需要具备数据存储和分析功能,能够将历史生产数据进行存储和分析,为生产管理和质量控制提供依据。
6.网络通信和远程监控功能:注塑机计算机控制系统需要具备网络通信和远程监控功能,能够通过互联网对注塑机进行远程监控和控制,提高生产管理的便捷性和灵活性。
7.可编程控制和自动化技术:注塑机计算机控制系统需要具备可编程控制和自动化技术,能够实现自动化生产和控制,提高生产效率和产品品质。
8.系统的稳定性和可靠性:注塑机计算机控制系统需要具备良好的稳定性和可靠性,能够在长时间运行和恶劣环境下正常工作,保障生产的连续性和稳定性。
总之,注塑机计算机控制系统技术条件需要满足数据采集和处理能力强、高精度测量和控制、全面的参数监控和报警、智能化操作界面、数据存储和分析、网络通信和远程监控、可编程控制和自动化技术、系统的稳定性和可靠性等要求。
这些要求的实现,将有助于提高注塑机的生产效率和产品质量,满足市场需求。
注塑机料筒温度控制系统的设计与实现

注塑机料筒温度控制系统的设计与实现摘要:注塑机料筒温度控制系统是一种自动化控制系统,用于控制注塑机的料筒温度。
本文介绍了一种基于注塑机料筒温度控制系统的设计,主要包括整体架构、控制器选择和参数设置、传感器选用和位置布置以及温度控制算法设计等方面。
通过系统硬件的搭建和调试以及控制程序的编写和测试,成功实现了该系统的功能。
同时,本文对实现过程中遇到的问题进行了总结,并提出了改进的思路。
关键词:注塑机;料筒温度控制系统;温度控制算法一、引言注塑技术是现代工业生产中广泛应用的一种成型工艺,在塑料加工过程中,温度受控制是保证产品质量的重要因素之一。
而注塑机料筒温度控制系统则是实现这种温度控制的核心部分。
本文旨在介绍一种基于控制器、传感器和温度控制算法等技术手段的注塑机料筒温度控制系统的设计与实现。
二、注塑机料筒温度控制系统的设计(一)整体架构设计控制器是注塑机料筒温度控制系统的核心,负责接收来自传感器的采集数据,并根据预设的算法进行处理,以实现温度的精确控制。
控制器通常由单片机、存储器、显示屏等组成,其主要功能包括,接收温度传感器输出信号,计算温度误差,并根据误差值调整加热功率或冷却功率,显示当前温度及设定温度,报警机制,对异常情况进行报警提示。
控制器的设计需要考虑系统的应用场景、温度范围和精度要求等因素。
温度传感器是注塑机料筒温度控制系统中必不可少的部分,它的作用是实时采集料筒内部的温度信息,并将其转化为电信号输入到控制器中,以进行处理和反馈。
常用的传感器包括NTC热敏电阻、PT100电阻等,其选择需要根据应用场景和要求确定。
传感器的精确性、灵敏度和快速响应至关重要,因此在选型时需结合实际需要进行综合考虑[1]。
加热/冷却设备是控制系统的外围辅助部件,其作用是根据控制器输出的信号来调整注塑机料筒内部的温度。
加热设备通常采用电热棒或电热线圈,而冷却设备则使用风扇或水冷装置。
加热/冷却设备的特点和选型与传感器类似,需要根据实际需求进行综合考虑。
注塑技术知识点总结
注塑技术知识点总结一、注塑机的组成和工作原理1. 注塑机的组成注塑机主要由注射系统、熔化系统、成型系统、冷却系统、开模系统和电气控制系统组成。
注射系统包括进料装置、螺杆和筒体,它的主要作用是将塑料颗粒熔化后注入模具中。
熔化系统由加热器和温控系统组成,用于加热和维持塑料的熔化温度。
成型系统包括模具和模具的锁紧机构,用于塑料的成型和冷却。
冷却系统主要是通过水循环系统来冷却模具和塑料,以确保成型后的产品质量。
开模系统是用于打开和关闭模具的机构,以及取出成型后的产品。
电气控制系统用于控制整个注塑机的运行和参数调节。
2. 注塑机的工作原理注塑机的工作过程主要包括螺杆运动、熔化塑料和注射成型三个步骤。
首先,在螺杆的作用下,将塑料颗粒从进料装置中输送到筒体中,并在加热器的作用下熔化成熔体。
然后,在一定的压力下,熔化的塑料被注入到模具中,通过成型系统进行冷却,最终得到成型后的产品。
二、注塑模具的设计和制造1. 注塑模具的设计要点注塑模具设计的关键是要根据产品的结构特点和注塑工艺要求,确定模具的结构形式和尺寸。
在注塑模具设计中,需要考虑产品壁厚、尺寸精度、表面光洁度和成型后的产品结构等因素。
模具设计时需要遵循合理的结构原则,保证模具的刚度、强度和耐磨性,以及方便加工和维护。
另外,注塑模具的设计还需要考虑模具的冷却系统、排气系统和脱模系统等配套设施,以确保成型后产品的质量和生产效率。
2. 注塑模具的制造工艺注塑模具的制造工艺主要包括模具材料选择、模具加工和热处理等环节。
在模具材料选择方面,需要根据成型产品的要求和模具的使用条件,选用合适的模具材料。
模具加工包括模具结构部件的加工和装配,以及模具表面的加工和调整。
模具的热处理是为了提高模具的硬度、强度和耐磨性,以延长模具的使用寿命。
三、塑料材料的选料和加工性1. 塑料材料的选料原则在注塑加工中,塑料材料的选料是非常重要的,直接影响产品的质量和生产成本。
塑料材料的选料需要考虑产品的用途、结构要求、机械性能和耐用性等因素。
注塑机的结构和功能
注塑机的结构和功能注塑机是一种用于塑料成型的机器设备,通常用于生产各种塑料制品,例如塑料瓶子、塑料盖子、塑料容器、塑料玩具等等。
它的主要结构由注塑系统、电气控制系统、液压系统、冷却系统等组成。
以下是详细的注塑机结构和功能介绍。
1. 注塑系统注塑系统是注塑机的核心部件。
它由注塑机的主要部件组成,包括注射缸、螺杆、喷嘴、加热器和温控器。
注塑系统的功能是将塑料原料送入注射缸中,通过加热和高压力,使塑料原料融化并推入模具中。
注塑系统的质量直接决定了注塑机的精度和效率。
因此,注塑系统的材料和制造工艺非常重要。
2. 电气控制系统电气控制系统是注塑机的重要组成部分,它由控制面板、电子传感器、电机和电器设备组成。
电气控制系统的主要功能是控制注塑机的各项操作,例如升降模、开关摆臂、启动离合器、加温等。
电气控制系统还可以采集注塑机的工作数据,并对它进行分析和处理,从而实现生产优化和自动化控制。
3. 液压系统液压系统是注塑机的重要组成部分,它主要由充油箱、液压泵、液压马达、液压阀、油压计等组成。
它的主要功能是为注塑系统提供高压液压力,以促使注塑杆移动,在模具中注射熔融的塑料原料。
液压系统的质量是注塑机精密控制的关键,因此它的结构和制造工艺必须保证高质量和可靠性。
4. 冷却系统冷却系统是注塑机中的另一个重要部分。
它主要由冷却器、水泵、喉管等组成。
冷却系统的主要功能是为注塑模具提供冷却水,以防止塑料制品变形和缩水。
同时,它还可以在注塑过程中提高生产效率和减少周期时间。
冷却系统的稳定性和性能也直接影响塑料制品的质量。
总的来说,注塑机是一个非常重要的生产工具,从结构和功能上看,它非常复杂和精密。
注塑机的高质量和稳定性使得它可以满足各种不同的生产需求,并且可以生产各种不同的塑料制品。
注塑机是现代工业生产中不可或缺的机器之一,能够大大提高生产效率和产品质量,具有广泛的应用前景。
塑料注射成型机PLC控制系统设计

摘要注塑机控制系统是注塑机整机的一个重要组成部分,其性能优劣对整机至关重要。
本论文首先确定了注塑机控制系统的设计方案与思路,经过与单片机控制、微机控制、继电接触器控制等控制系统相比较,决定采用PLC来实现对注塑机各动作的控制。
确定了PLC输入和输出接口的属性,将注塑机的所有检测开关、限位开关、手动操作开关和主令开关等,进行确切地分类和编号,从而确定了I/O口的数量。
根据输入输出的数量、类型确定PLC的型号为FX2N-MR。
完成了注塑机主电路和控制电路等硬件电路的设计。
软件设计方面,根据注塑机各个动作制出注塑机的工艺流程图。
根据此工艺流程图,设计出注塑机的动作流程图,根据动作流程图写出注塑机的状态转移图,并依据状态转移图写出步进梯形图。
关键词:注塑机,控制系统,状态转移图,步进梯形图目录摘要............................................................. 第一章绪论.. 01.1塑料机械行业概述 01.2国内外注塑机的研究现状 01.3注塑机的发展趋势 (2)第二章注塑机系统概述 (4)2.1注塑机的组成 (4)2.2注塑机的分类 (5)2.3注塑机控制系统的抗干扰措施 (6)第三章注塑机控制系统的设计方案和思路 (9)3.1注塑机控制系统设计的主要内容和工艺分析 (9)3.2设计的思路和方案 (10)第四章注塑机的PLC控制系统硬件和软件设计 (13)4.1输入输出点的继电器属性 (13)4.2PLC机型的选择 (14)4.3输入输出地址分配表 (15)4.4主电路的设计 (17)4.5控制电路的设计 (18)4.6注塑机的动作流程 (19)4.7程序设计 (23)第五章总结与展望 (33)5.1结论 (33)5.2展望 (34)致谢 (35)参考文献 (36)第一章绪论1.1 塑料机械行业概述从20世纪50年代技术创新推出了螺杆式塑料注射成型机至今已有50多年的历史。
注塑机结构及工作原理
2024/7/25
15
推力面摩擦力的作用下,物料被压缩成密集的固体塞螺母,
沿着螺纹方向做相对运动,在此段,塑料为固体状态,即 玻璃态。
h1— 加料段的螺槽深度。h1深,则容纳物料多,提高了 供料量和塑化能力,但会影响物料塑化效果及螺杆根部的 剪切强度,一般h1≈(0.12~0.16)ds。
L3 — 熔融段长度。熔融段又称均化段或计量段,熔体在 L3段的螺槽中得到进一步的均化,温度均匀,组分均匀, 形成较好的熔体质量,L3长度有助于熔体在螺槽中的波动 ,有稳定压力的作用,使物料以均匀的料量从螺杆头部挤
L2 — 塑化段(压缩段)螺纹长度。物料在此锥形空间 内不断地受到压缩、剪切和混炼作用,物料从L2段入点开 始,熔池不断地加大,到出点处熔池已占满全螺槽,物料 完成从玻璃态经过黏弹态向黏流态的转变,即此段,塑料 是处于颗粒与熔融体的共存状态。L2的长度会影响物料从 玻璃态到黏流态的转化历程,太短会来不及转化,固料堵 在L2段的末端形成很高的压力、扭矩或轴向力;太长则会 增加螺杆的扭矩和不必要的消耗,一般L2=(6~8)ds。 对于结晶型的塑料,物料熔点明显,熔融范围窄,L2可短
机身 液压系 统 加热系统 冷却系统
控制系统
加料装置
顶出装置 泵、液压马达、阀 蓄能器 冷却器 管路等油路控制
动作程控 料筒温度控制 液压泵电机控制 故障检测报警控制
安全保护
图2 注塑机组成示意图
2024/7/25
5
(一)注塑部件的典型结构
1.注射部件的组成 目前,常见的注塑装置有单缸形式和双缸形式,我厂注 塑机都是双缸形式的,并且都是通过液压马达直接驱动螺 杆注塑。因不同的厂家、不同型号的机台其组成也不完全 相同,下面就对我厂用的机台作具体分析。 立式机和卧式机注塑装置的组成图分别如图3和图4。 工作原理是:预塑时,在塑化部件中的螺杆通过液压马 达驱动主轴旋转,主轴一端与螺杆键连接,另一端与液压 马达键连接,螺杆旋转时,物料塑化并将塑化好的熔料推 到料筒前端的储料室中,与此同时,螺杆在物料的反作用 下后退,并通过推力轴承使推力座后退,通过螺母拉动活
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• V/P切换没有延时
• 改善机械摩擦的影响 • 位置控制和压力控制的保压方式自动切换 • 减少压力过冲现象
Jan - 2008
25
R-CPU300 positioning and comparison - Alessio Fausti
XVy-EV 伺服驱动器
XVy-EV伺服驱动器用于控制无刷同步电机,在全电动 机器中用来控制模板,注射,储料和脱模的高性能驱动 器。
GILOGIK II
家族的(node)节点结构
底部母板 + 网关网桥模块
+ 总线通讯模块 + 远程 I/O模块
1
2
1: 2,4,8,12,18 槽底部母板,可轻易安装于DIN导轨或控制盘支架上。 2: 所有模块通过母板将IO信息传递给位于最左边的控制单元。
Jan - 2008
16
R-CPU300 positioning and comparison - Alessio Fausti
Slide 12
Jan - 2008
13
R-CPU300 positioning and comparison - Alessio Fausti
Slide 13
GDNET – 确定性的工业以太网
Jan - 2008
14
R-CPU300 positioning and comparison - Alessio Fausti
Jan - 2008
19
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
传统解决方案的缺陷
下图分别是加减速时,速度环曲线和电流环曲线的波形记录,以及速度产生阶跃时的放大波 形。 每一次速度阶跃变化都会导致电流环产生一次抖动,从而直接导致输出扭矩抖动。这种现象 长期发生会导致电机发热,振动,和机器噪音。
全电动机型: 现场总线解决方案
全电动机型: 高速注射 – GEFRAN的方案是 ….
注射速度从原先的 300… 500 [mm/s] 逐渐提升至 800 … 1000 [mm/s]
为了达到这样的性能,GEFRAN的方案是注射单元配备2至3个同步电机,由XVY驱动器驱动, 机械上由皮带轮连结。 XVy-EV 驱动器主站接收PLC发过来的速度值和位置值,同时将扭矩设定值发送给XVy-EV驱 动器从站,保证同步带载。
Jan - 2008
24
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
注射速度,保压压力与背压闭环控制
• PLC 内部快速 PID 功能,刷新电机速度 (周期时 间 = 1ms),从而构建压力闭环和背压闭环,.
* 24v电源供给,适用于距离超过100米的情况, 非母板安装,可置于控制柜的任何地方。
Jan - 2008
17
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
传统的基于现场总线的控制方式
Jan - 2008
18
主要特点: 控制算法是专对无刷同步电机的 (和带反馈信号的异步电机) 电源 3x 230Vac – 480Vac 功率范围最多达到 1.5MW
最多有 19 点可编程数字量输入和14 数字量输出
最多4 路模拟量和 4 路模拟量输出 高过载性能(150%-180%过载60s, 瞬间过载能力200%-250%) 反馈输入信号: Resolver – 正余弦编码器 – 数字增量和正弦编码器 -
下图是使用了插入器后记录的速度环曲线和电流环曲线的波形,以及速度产生阶跃时的放大 波形。 可以看到,当速度产生变化时,特别是在速度斜坡拐点处,扭矩电流的曲线相对就更为平滑, 线形。 因此,就算电机瞬间加减速(比如50ms),电流和扭矩波形曲线也得到了很好的改善。
Jan - 2008
23
R-CPU300 positioning and comparison - Alessio Fausti
6.5 10.4
有 有
有+分 离 有+分 离 相同 I-O 模块
略低于 GTC
液压机 高速机 精密机
1ms
是
VEDO ML
600 Mhz (Geode LX900)
6.5
有
有+分 离
略高于 GTC
10.4
12.1
有
标准
有+分 离
分离 GILO GIK2 远高于 GTC
液压机 伺服泵 伺服阀 全电动
500us 1ms
Jan - 2008
20
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
GEFRAN的Interpolator(软件位置插补)控制方案
Jan - 2008
21
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
速度曲线产生器每 2ms/4ms向驱动器刷新设定位置值, 以及走完这个位置曲线所需要的起始速度和结束速度。 三阶位置插补软件 (3° Order Interpolator)将位 置设定值细分为一个一个的步骤,一个细分步骤每 250 微 秒执行一次,从而保证运动曲线的连续性。
1,产品革新之:硬件
< HL 系列 >
VEDO三大系列 : TL,ML,HL 满足不同应用需求
< ML 系列 >
< TL 系列 >
* GTC :现有GEFRAN控制系统 型号 CPU 屏幕尺寸 触摸屏 键盘 IO 与GTC 比较性能 应用机型 PLC 绝对周期 闭环 应用
VEDO TL
266 Mhz (Geode SC 2000)
控制面板
控制软件
Resolver
GDnet确定性实时以太网 = 高速刷新
伺服驱动器 绝对值编码器
Jan - 2008 11 R-CPU300 positioning and comparison - Alessio Fausti
实时以太网IO
Jan - 2008
12
R-CPU300 positioning and comparison - Alessio Fausti
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
传统解决方案的缺陷
PLC内部的速度产生器和位置控制模块每间隔 2ms (T 周期) 向驱动器刷新发送 设定速度。
恒速运行时不会产生问题。 但是瞬间加减速时,设定速度每隔 一次刷新时间就会产生一个阶跃。
页面组态 Java 控件 闭环回路 C++ 代码 动作逻辑 Ladder 梯形图
动作逻辑 OpenPCS (IEC 1131编程语言)
功能简介 : ● 10 段注射曲线,10 段保压曲线 ● 96 路 PID 温度控制,用户自由组态温区,热流道控制 ● 8组中子,8组吹气,中子全周期自由组态,无须再为特殊中子程序烦恼 ● 多国语言同时在线 – 中文,英文,意大利文,西班牙文,俄罗斯文,韩文等 ● 蓄能器,欧规12/67
是
15
VEDO HL (Pentium 600Mhz, 1.5Ghz, 1.8Ghz) 12.1
标准
标准
分离
分离 全电动 等高级 应用 100us 1ms 是
15 19
标准
分离
2,产品革新之:软件 开发环境从 TEAM -〉SEVEN -〉GAB (Gefran Automation Builder) -> GF_PACK INJECTION (全新注塑机控制软件包)
• 基于物理层协议 100 BaseT (100 Mbps高速以太网) • 同步传输协议,主站驱动固定频率 , 例如一个GILOGIKII 节点 100 微秒 • 系统抖动误差 (高优先权事件引起的 延时) 近于 0 • 网络上所有节点的数据等时刷新 • 远程I/O数据本地化
标准的以太网硬件100 Mbps
● 质量控制 SPC
● 肘节式/两板式/直压式开合模控制 ● 页面实时截屏,存入USB ● USB 存取数据,USB 程序安装或升级(方便售后服务)
● 连接至本地局域网,远程监控,实现工厂自动化
● 集成伺服节能机的压力闭环控制 - 压力环快速响应,过冲小 - 能同时控制 多个泵
GEFRAN 全电动解决方案
绝对值编码器 EnDat, SSI and Hyperface
支持CANopen, Devicenet, 和 GDnet 现场总线接口 (12 + 12 交换字 – 数据刷新时间 250微秒) 软示波功能 PLC 完全基于 IEC 61131-3 (5 编程语言)环境 XVy-EV … WH 多种冷却方式,风冷,水冷,穿墙式
优点: • 改善轴速度曲线,从而改善电机电流和扭矩。 • 机器性能改善 • 速度产生器的刷新时间可以延长,可以同时控制多个轴的运动
Jan - 2008
22
R-CPU300 positioning and comparison - Alessio Fausti
全电动机型: 现场总线解决方案
Gefran 软件插补控制方案
Jan - 2008
26
R-CPU300 positioning and comparison - Alessio Fausti
1个毫秒之内机器的状态监控已经