美国海军水下无人航行器发展综述
美海军无人潜航器发展
美海军无人潜航器发展无人潜航器(UUV)有着广泛而重要的军事用途,在未来海战中有不可替代的作用。
UUV利用自身的各种传感器和武器,执行远程通信中继、反潜警戒、水下侦察与监视、反水雷等一系列重要军事支援任务。
UUV在未来海战中UUV还可作为水下武器平台、后勤支持平台等装备使用。
UUV具有零伤亡、隐蔽性能强、可重复使用和性价比高的特征,可通过搭载不同类型任务载荷,完成多种使命任务,应用前景十分广阔,作为一支独具特色的作战力量,已经成为未来海战的“倍增器”。
美国是研究水下无人潜航器平台时间最早、装备型号最多、功能最强大、技术水平最高的国家,引领各国水下无人平台的发展方向。
一规划2000年,美海军发布《无人潜航器主计划》第1版,明确了水下无人航行器在军事应用方面的7种使命与4 种作战的特征能力。
2002年,美海军颁布《美国海军转型路线图》,提出了加强海军新型无人飞机、水下无人潜航器等无人装备的研制和使用,以发展和运用海军持久的情报监视侦察能力、反潜战能力和反水雷能力。
2004年,美军公布的UUV 的发展规划报告中,为实现《21世纪海上力量》提出的4 种支柱能力目标,综合考虑动力能源技术、指挥控制通信自动化技术、载荷/传感器等技术的发展情况,按照优先级提出了UUV 的9 种“子支柱”能力及任务使命:情报、监视和侦察(ISR)、反水雷措施(MCM)、反潜战(ASW)、检查/识别、海洋学、通信/导航网络节点(CN3)、载荷投送、信息战(IO)以及时敏打击(TCS)。
美军先后发布了多版《无人系统集成路线图》。
系列文件显示了美军发展智能化AUV的规划,具有重要的导向作用。
2007年,美海军在《2007-2032 美国无人系统集成路线图》中提出无人系统4 大关键任务需求:侦察与监视;目标识别与指示;反水雷;核生化、辐射及爆炸物侦测。
2009年,美海军在《2009-2034 美国无人系统集成路线图》中提出了5项联合能力域中无人系统需求和2 项性能发展需求。
国外水下无人潜航器及其通信技术发展综述

国外水下无人潜航器及其通信技术发展综述一、本文概述随着科技的快速发展,无人潜航器(Unmanned Underwater Vehicle,UUV)作为海洋探索与利用的重要工具,已经吸引了全球科研人员和工程师的广泛关注。
作为无人潜航器的重要组成部分,水下通信技术对于实现潜航器的远程控制、数据传输、多潜航器协同作业等功能具有关键作用。
本文旨在综述国外水下无人潜航器及其通信技术的发展现状与趋势,分析当前主流通信技术的优缺点,并探讨未来可能的研究方向和应用前景。
通过对国外相关文献的梳理和分析,本文旨在为国内外从事水下无人潜航器及通信技术研究的学者和工程师提供有益的参考和启示。
二、国外AUV的发展现状近年来,随着科技的飞速发展,国外在自主水下航行器(AUV)领域取得了显著的进步。
AUV作为水下无人潜航器的一种,其自主导航、环境感知、任务执行等能力不断增强,为海洋科学研究、海底资源勘探、水下搜救等领域提供了有力支持。
在硬件设计方面,国外的AUV技术日趋成熟。
许多先进的AUV已经实现了小型化、模块化、高度集成化,以适应不同复杂度的水下环境。
例如,某些AUV采用了先进的推进系统,包括矢量喷水推进器、机械式螺旋桨等,以提高其机动性和稳定性。
同时,为了应对深海高压、低温等极端环境,AUV的耐压壳体和材料技术也在不断更新,确保了AUV的安全性和可靠性。
在软件技术方面,国外的AUV已经实现了高度智能化和自主化。
通过集成先进的算法和人工智能技术,AUV可以自主完成路径规划、环境感知、目标识别等任务。
随着深度学习技术的发展,AUV在图像识别、声呐信号处理等方面也取得了显著突破,进一步提升了其在水下复杂环境中的作业能力。
在通信技术方面,国外的AUV同样取得了长足的进步。
为了实现在水下环境中的数据传输和远程控制,研究人员开发了一系列高效、稳定的水下通信技术。
例如,某些AUV采用了高速水声通信技术,实现了与水面基站或卫星的实时数据传输;还有研究团队在探索利用电磁波或光学通信技术在水下环境中实现数据传输的可能性。
中国在南海当面捞走美军无人潜航器国外无人潜航器最新发展现状

美全国广播公司 (NPR )16 日报道, 本周四 (12 月15 日),中国海军趁美国一艘无人潜航器浮上水面之机, 抢在美 军打捞人员之前将其捞走,事情发生在距离菲律宾苏比克湾 约 50 海里的海上。
美国泰里达因公司研制的斯洛克姆无人水下滑翔机(Slocum glider ) 美国:水下无人滑翔机将用于远海作战 美国海军 学院新闻网 (USNI news ) 今天补充了部分事件细节,据称, 捞走美国无人潜航器的是中国海军“南救 510”号打捞救生船, 该船为中国 922 型救捞船 (北约称“大浪 3”级),该舰当时与美 国正在用无人机进行海底地形探测作业的“鲍迪奇”号海洋调 查船仅 500 码(457.2 米) 。
被捞走的无人水下航行器是“水下 滑翔机”,这是美国最复杂的无人潜航器, 用于进行海洋调查, 上面装有用于探测海底地形的非保密装备。
美媒称捞走 他们水下航行器的就是这艘南救 510 号救捞船 无人潜航器,英文名 Unmannedunderwater vehicle 是没有 人驾驶、靠遥控或自动控制在水下 航行的器具,主要指那 些代替潜水员或载人小型潜艇进行深海探测、救生、排除水 雷等高危险性水下作业的智能化系统。
其实也就是水下机器 人(或其中某种) 。
人潜航器按应用领域,可分为军用与民 用。
在军用领域上,无人潜航器可作为一种新概念武器中无 人作战平台武器。
从这种意义上说,无人潜航器的作用和无 人机作用差不多。
中国在南海当面捞走美军无人潜航器 新发展现状 国外无人潜航器最从外形上看,一些无人潜航器与鱼雷十分相似,那是因为它们可能直接由拆除了炸药的鱼雷改进而来,或者是需要从潜艇的鱼雷发射管中释放,但更多的无人潜航器则针对特定的功能, 具有各自独特的构造。
无论外观怎样,无人潜航器一般都由骨架及浮体、推进系统、航行控制系统以及探测系统等部分组成,一些无人潜航器上还配有机械手等机构。
无人潜航器的发展得益于仿生学的进步,这一点毋庸置疑。
无人水下航行器声呐装备现状与发展趋势
无人水下潜航器(UUV)最早出现于20世纪60年代。
在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。
近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。
美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示。
表1 不同级别UUV任务需求优先级美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查;⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战;⑨时敏打击。
不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。
UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。
根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。
图1 UUV主要声呐装备通信声呐主要用于UUV与协同行动的其他UUV、母船(艇)或通信浮标之间的信息链接;导航声呐为UUV的安全航行和执行作业任务提供其位置、航向、深度、速度和姿态等信息;探测声呐主要用于警戒、探测、识别水中或沉底目标信息,对水下地形、地貌、地质进行勘察和测绘。
无人水面航行器发展
S ac n y rga hc V hc ,A H) erh a d H do r i e i e S ,后来 p l
加坡 海军加入到了美 国海军 的S A T N 划 P RA 计 之 中。 P R A S 是 一种模 块化 、 SA T N U V 可重 构 、 多
无人 航行 展 装备研 究 麓 水面 器发
无 人 水 面 航 行 器 发 展
A s a c n t e De eo Re e r h o h v lpme to h ma n d S r c hc e n ft e Un n e u f e Ve ils a
一
使命功 能
关键技术
文 献标 识码 : A
文章 编号 :6 1 4 4 (0 9 0 — 0 7 0 1 7 - 5 7 2 0 )6 0 1 — 4
信 息 战是2 世纪 的主导 战争 样式 。随着 信 息战 向海 战 场 的延 伸 , 来 的海 战面 1 未
临着信息化的挑战。在海上一些恶劣海情和区域下 , 参战人员很难完成相应的作战
合扫雷能力。 国海军正在开发一种猎雷U V 美 S, 称 为 远 距 离 猎 雷 系 统 (e t Mieh nig R mo n— ut e n Ss m, MS 如 下 图 1, yt R , e )其通 气 孔 半 潜 于 水 下 , 拖曳有猎雷传感器。该系统是水面舰船建制式 反 水雷 的一种 。
任务 , 此 , 国 、 罗 斯 、 洲 、 为 美 俄 欧 日本 等 国 , 正在 加 紧 研 制 无 人 水 面 航 行 器 (s ) u v项 目, 于完成 恶劣 战 场环境 的作战需 求 。 用 无 人 水 面航 行 器 (s umand sr c eie是一 种 小 型水 面 自航 载体 , u v,n n e uf evhc ) a l 以 水 面舰 艇为支 援 平 台 , 长 时间 自主 远程航 行 的无 人 智能 小 型武 器装 备平 台。利用 可 无 人水 面航行 器 可 以进 行海 战 坊 隋报 收集 , 战场 监视 分析 、 战场感 知传 播等 。 海 海
UUV与AUV国内外发展情况
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
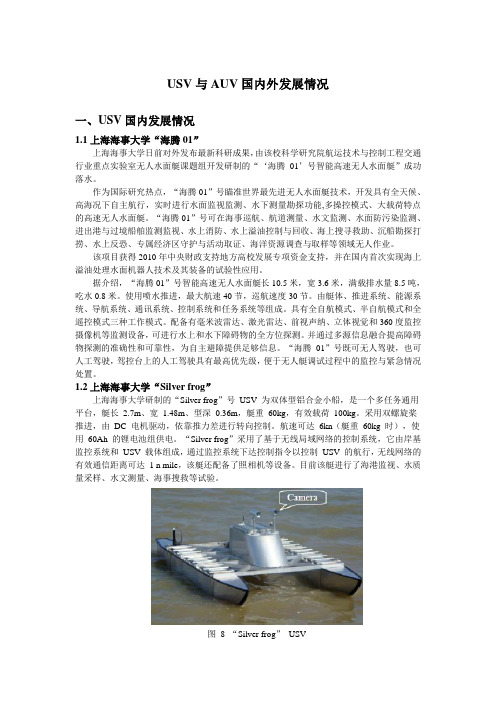
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
美海军分析2025年自主潜航器需求

防务观察】美海军分析2025 年自主潜航器需求本文转自“国防科技要闻” ID : CDSTIC )一、自主潜航器基本分类自主潜航器是指可自主航行、执行水下作战任务的各种水下航行器。
美海军当前将其分为自推进型、环境动力型、其他系统三大类。
1. 自推进型自主潜航器自推进型自主潜航器可分为超大型、大型、中型、小型自主潜航器四类。
①超大型自主潜航器:直径超过84英寸(合213厘米),可利用起重机等操作设施从岸上或舰上布放。
②大型自主潜航器: 直径在21〜84英寸(合53〜213厘米)之间,可通过“弗吉尼亚”级潜艇有效载荷模块、巡航导弹核潜艇有效载荷发射管及其他合适的水面舰艇布放,也可通过操作设施从岸上或舰上布放。
③中型自主潜航器:直径在10〜21英寸(合25〜53 厘米)之间,可通过潜艇标准鱼雷发射管、大型鱼雷发射管、垂直发射系统发射管布放,也可从岸上或水面舰艇上布放。
④小型自主潜航器:直径在3〜10英寸(合7.6〜25厘米)之间,可以是便携式自主潜航器,可通过各种平台(包括较大型自主潜航器)布放,还可通过潜艇布放。
▲美国波音公司研制的大型自推进潜航器'回声旅行者'I Echo Voyager )2. 环境动力型自主潜航器环境动力型自主潜航器大体可分为浮力滑翔机和波浪滑翔机两类。
①浮力滑翔机:通常是通过固定翼将浮力转换为前进动力的小到中型自主潜航器,但此种推进方式在速度方面较为受限。
大多数该类型自主潜航器可通过小型舰艇布放与回收。
②波浪滑翔机:也被归类于无人水面舰艇,该类自主潜航器通常携带类似冲浪板的漂浮板,利用波浪运动可产生1〜2节的推进力,另外,漂浮板表面覆盖着太阳能板,可为滑翔机电池充电。
此类自主潜航器可运行数月之久,可从岸上或舰上布放与回收。
▲美国“滑浪者” Wave Glider )无人系统利用海浪运动产生推力3. 其他可部署的水下传感器和通信系统其他系统包括隐蔽型探测系统,能源补给、数据管理与通信基础设施等。
美军水下无人系统发展探讨
美军水下无人系统发展探讨海军装备部摘要:美军试图通过大力发展以自主潜航器为主体的水下战无人装备,加强前沿水下无人系统预置,全力推进水下无人区域监控系统布建,突出攻关水下自主导航、通信组网、自主协同等先进技术,打造新型水下作战体系。
本文对美军的水下无人系统的发展进行了论述。
关键词:水下无人系统;美国海军;无人潜航器;水下战1 突出水下无人系统对于联合作战的重要性长期以来,美国海军对于水下无人系统的研发和应用更多偏重于执行ISR和反水雷等作战辅助任务。
随着海军作战能力需求的变化,水下无人系统能力的提升,美国海军正重新审视水下无人系统在联合作战中的地位与作用。
1.1 积极利用水下无人系统增强水下综合作战能力美国海军认为,美国的潜在对手正在构建能对美军舰艇及水下基础设施形成威胁的能力,美国在水下战领域的优势正不断被削弱。
而核潜艇等先进水下平台,由于建造和使用成本高昂,数量上无法完全满足作战需求,迫切需要补充新型作战力量,与潜艇形成优势互补,从而增强综合水下战能力。
《下一代水下无人系统》报告指出,水下无人系统能够有效补充并拓展有人水下系统的能力,对当前因缺乏有效作战手段而难以执行的军事任务,可由无人作战系统来完成,即便是核潜艇能够完成的任务,水下无人系统的协同和配合也能大幅提高作战效能。
1.2 积极增强水下无人系统跨域协同作战能力如何充分发挥水下作战优势以弥补其他作战领域面临的严峻挑战,是美国海军重点关注的问题。
创造性地使用水下无人系统,能为美国海军提供全新作战能力。
美国海军认为,未来水下无人系统的应用模式将主要是联合使用和分布式作战,联合形式包括:多形态无人系统跨域协同或组网、异构无人系统协同或组网、子母式无人系统接力作战、跨介质组合式无人系统等。
美国海军于2016年“先进海军技术演习”期间,演示了“潜艇-无人潜航器-无人机”子母式协同作战的能力。
上浮式有效载荷和深海预置武器等新概念装备的出现,也可视为该努力的一部分。