水下航行器-发射筒间隙流动仿真
潜载无人水下航行器自航布放内弹道模型与仿真
112
中
国
舰
船
研
ห้องสมุดไป่ตู้
究
意深度布放, 能增强潜艇的隐蔽性和突然性。 潜载无人水下航行器在鱼雷发射管内的运动 与敞水状态完全不同, 属于非常局限边界条件下 的运动。在现有的无人水下航行器研究中, 对航 行器的运动和流体动力参数、 电机和螺旋桨的启 动特性等的研究都是在专用水池或湖水中进行, 并未考虑水域边界的影响, 而潜载无人水下航行 器自航布放时, 航行器是在非常局限的边界条件 下运动, 其速度和周围的补水速度都在不断变化, 因此, 必须考虑边界的影响。无人水下航行器在 敞水状态下的整个启动过程非常短, 一般不予考 虑, 但在进行自航布放时, 该启动过程及其对内弹 道的影响就必须加以考虑。 本文将在自航鱼雷内弹道研究的基础上[7-8], 建立潜载无人水下航行器自航布放的理论计算模 型, 利用流体力学控制体的概念, 对无人水下航行 器布放过程中的附加流体阻力进行实时分析及仿 真计算, 并对潜载无人水下航行器的口径大小对 自航布放的影响进行分析。
doi: 10.3969/j.issn.1673-3185.2014.01.016 网络出版地址: /kcms/doi/10.3969/j.issn.1673-3185.2014.01.016.html
第9卷 第1期 2014 第 1 期年 2 月
中 国 舰 船 研 究 Chinese Journal of Ship Research
文献标志码: A
要: 通过对等截面鱼雷发射管自航布放无人水下航行器 (UUV) 过程中的受力进行分析, 建立内弹道的数学
的阻力变化规律进行对比和分析, 从理论上对 UUV 自航出管的可行性进行论证。仿真结果表明, 选取 500 mm 关键词: 无人水下航行器; 潜艇; 自航布放; 内弹道模型; 仿真; 流体阻力
一种航行体水弹道的数值仿真与试验研究
一种航行体水弹道的数值仿真与试验研究姚保太;都军民【摘要】针对一种航行体复杂的水弹道特性,对流固耦合数值计算方法进行分析,并在此基础上采用MSC.DYTRAN有限元分析软件建立起航行体水弹道仿真计算模型,应用该模型计算得到航行体水中运动规律.研究了水弹道缩比试验相似准则及测试方法,开展多发次缩比试验获取了航行体水弹道特性.仿真计算和缩比试验结果的对比分析表明二者一致性较好,试验和计算方法能够为相似研究提供指导.【期刊名称】《舰船科学技术》【年(卷),期】2015(037)007【总页数】5页(P104-107,127)【关键词】水弹道;数值仿真;缩比试验;流固耦合;相似准则【作者】姚保太;都军民【作者单位】中国船舶重工集团公司第七一三研究所,河南郑州450015;中国船舶重工集团公司第七一三研究所,河南郑州450015【正文语种】中文【中图分类】TL375一种航行体在水下一定深度垂直发射,先后经历发射管内运动、水中运动、出水、重新入水等阶段,最终依靠正浮力漂浮于海面。
其中航行体的管内运动特性称为内弹道,而在水中的运动特性被称为水弹道。
为了实现航行体特定功能,需要对航行体的整个水弹道特性进行有效控制。
航行体水弹道的控制主要依靠其外形设计和安装在尾部的8块不对称舵板机构共同实现。
当航行体发射出管后,尾部舵板快速张开,开始对航行体的姿态和速度进行控制。
由于航行体水弹道包含水中段、出水段、空中段、再入水段以及最终静止漂浮过程,因此采用传统的解析方法,即通过建立运动学方程和动力学方程实现水弹道解算的难度非常大。
为此,需要开展相应的仿真计算和试验研究,通过对这2种方法进行互校,确定合理的航行体水弹道计算模型和试验方法,最终获取真实有效的特征数据。
1.1 仿真计算模型的建立航行体在水中的运动是一个典型的流固耦合过程,即航行体运动改变流场特性,反之周围流场变化又影响航行体的运动规律,这二者之间相互作用、相互影响。
超空泡水下航行器空间运动建模与弹道仿真
Kie t o eiga d T aetr i lt nfr n mai M d l n rjco ySmuai o c n o
Und r t r S pe c V t tn h c e e wa e u r a ia i g Ve i l s
L ii IDa- n,L i j UO Ka ,DANG Ja - n,WANG Yu c i HANG Yu w n in j u —a ,Z — e
第3 3卷 第 8期
20 12年 8月
兵
工
学
报
Vo _ No 8 l 33 . Au g. 2 2 01
ACTA ARM AM ENTARI I
金 ,罗凯 ,党 建 军 ,王 育 才 , 宇 文 张
泡 之 间不 可避 免地 出现沾湿 , 引起 航行 器受 力失衡 。 因此在建 立 系统 的空 间运 动 模 型 时 , 充分 考 虑 超 应
空 泡 “ 间延迟 ” 应 的影 响 。 时 效
杂 的相 互作用 , 使超 空泡航 行器 的流体 动力特 性 、 致
水下飞行器的弹道仿真

深度 要求 的提 高,飞行 器在 水 中段 的运 动 时间增 长 , 对于 静不稳 定 的飞行器 来 说 ,由于入水 攻角 的影 响 , 其姿态 是不 断发 散的 ; 同样地 ,提 高发 射深度 后 , 由
于水 中段行 程加长 , 飞行器 出水速 度 降低 ,使 得 飞行 器 出水 时间加长 ,导致 其 出水姿 态进一 步加 大 。
20 0 9年 第 6 期 总第 3 4 0 期
文 章编号 :1 0 —1 22 0 ) 60 0 -4 0 47 8 (0 9 0 ・0 l 0
导 弹 与 航 天 运 载 技 术
MI S LE S I S AND P S ACE VEHI ES CL
N O6 2 9 . 00 S um O.0 N 34
1 铅 垂 面 内无控 弹 道 的仿 真
1 无控 弹道模 型的建 立 . 1 根 据 飞行器 的受力 情况 ,水 弹道 可分为 筒 中段 、 水 中段 、 空 中段 。本文 研 究飞行器 在铅 垂面 内的运 动 情况 ,具 体分 为水 中段 和 出水段两 部 分 ,建 立水下 飞
行器 的弹道模 型:
真 ,根 据飞 行器无 控运 动时 的合外 力矩 ,增加 了控 制
力矩 ,建立 了水下 飞行 器有控 弹道 的数 学模 型 ,并对
的性 能 。 冷发射 状态 下的 飞行器 在水 中运动 时 , 由于 发射
= [ 一 + g()] i ( ) 互 + F s 南 。 十 +G —i n
( +
(- I
I [ 也(^ 一 + + 一 : +t 五 一 ) 一 C m g
cg GcsJ + )  ̄ 匠 一 o
.
十米 ,但 由于环 境和 起始 条件都 很苛 刻 ,涉 及 的 问题 比较 复杂 ,它 的设计 、研 究和试 验在 水下 飞行器 研制
仿鳐鱼水下航行器动态流体仿真
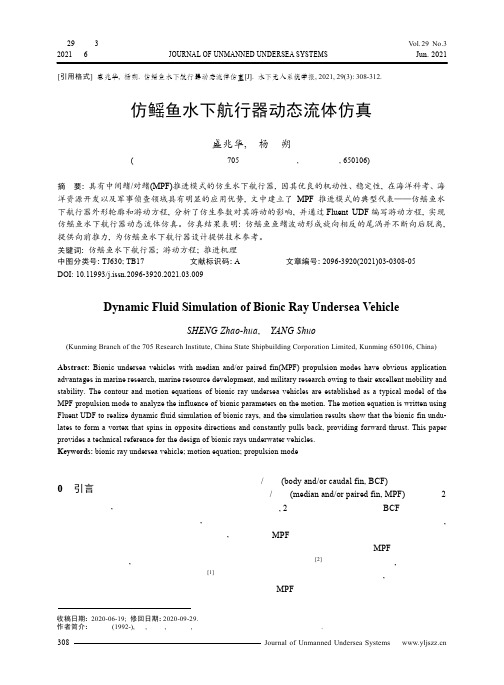
仿鳐鱼游动方程中共有 3 个仿生参数 n, m,
K 影响其游动, 如图 3 所示。
仿生参数 n 为仿生鳍形变系数, 用于模拟鱼
鳍摆动时因肌肉收缩而产生的宽度变化。当 n 0
时, 仿生鳍无形变。随着 n 增大, 仿生鳍形变量增
大, 鳍面变窄。仿真计算时, 一般取 n 0.124 2m2 。
仿生鳍摆动幅值与仿生参数 m 相关, 摆动幅
2021 年 6 月
盛兆华, 等: 仿鳐鱼水下航行器动态流体仿真
第3期
格节点坐标 xf , y f , z f 。
ynp y f
(8)
3) 反算 t 0 s 时刻仿生鳍外形坐标。参考式 式中, lambertW 为朗伯 W 函数。
(3), 将 xf , z f 合并后得到
xnpen sin K yf l1 l2xnp
图 2 仿鳐鱼坐标系 Fig. 2 The coordinate system of bionic rays
将仿生鳍平铺至中性面 Of xf yf , 得到仿生
鳍外形, 可用坐标点描述为
式中,
xnp
Snp
ynp
0
,
xnp
≥
0,
ynp
≥
0
(1)
1
xnp , ynp 分别为仿生鳍外形横、纵坐标。
0 引言
近几十年, 各国研究人员研制出大量具有自 然生物运动特点的仿生型水下航行器, 其具有作 业范围广、机动性和隐蔽性好、噪声低等优点, 克 服了传统螺旋桨推进方式的效率低、机动性差、 噪声大等方面缺点, 在海洋科研考察、海洋资源 开发以及军事领域具有很大的应用前景[1]。
主流的仿生水下航行器推进方式主要有身体
第 29 卷第 3 期 2021 年 6 月
水下弹体空化流动的数值模拟
水下弹体空化流动的数值模拟
曹达敏;徐旭
【期刊名称】《北京航空航天大学学报》
【年(卷),期】2008(034)010
【摘要】采用均质流模型对水下弹体的空化流动进行了数值模拟,控制方程的求解采用有限体积法,对流项采用迎风通量差分格式,时间步的推进则采用了LU-SGS隐式方法.使用质量传输模型模拟汽-液之间的质量转换.为了更好的计算低速流动,在计算中对对流项进行了预处理,并对质量传输源项进行了点隐式处理.对绕圆柱钝头体空化流动进行了模拟,雷诺数Re=136000,计算得到了圆柱形钝头体在空化数σ=0.1,0.2,0.3时的壁面压力系数,并与试验结果进行了对比,符合良好.在此基础上研究了弹体带尾迹的超空化现象,空化数σ=0.2,0.1,0.06,在σ=0.06下得到了水下弹体的超空化尾迹.
【总页数】5页(P1191-1194,1199)
【作者】曹达敏;徐旭
【作者单位】北京航空航天大学宇航学院,北京,100191;北京航空航天大学宇航学院,北京,100191
【正文语种】中文
【中图分类】V411.3
【相关文献】
1.水下钝体空化绕流数值模拟 [J], 金大桥;刘颖;陈树海;孙林;王百成;王聪
2.二维空化、超空化流动的数值模拟 [J], 钟诚文;汤继斌
3.空化、超空化流动的数值模拟方法研究 [J], 汤继斌;钟诚文
4.基于空化射流技术的养殖网箱水下清洗喷嘴数值模拟 [J], 林礼群;刘平;王志勇
5.水下航行体模型空化流动的数值模拟 [J], 魏卓慧;王树山;马峰
因版权原因,仅展示原文概要,查看原文内容请购买。
水下航行体连续垂直发射出筒过程多相流动特性研究
水下航行体连续垂直发射出筒过程多相流动特性研究
随着潜艇技术的不断发展,潜射导弹已经成为重要的战略战术力量,为了保
证战略打击的精确性和持续性,在传统潜射武器的基础上,研究水下航行体连续
垂直发射技术是未来潜射武器发展的趋势。
本文在此背景下,通过数值仿真和实验的手段研究航行体水下连续垂直发射过程,分析航行体出筒后,筒口流场演变
规律和运动学特性,重点研究两发航行体连续发射过程中产生的干扰问题。
首先,基于多相流模型,利用流体仿真软件完成了两发航行体出筒阶段的三维数值模拟。
研究了首发航行体和次发航行体出筒后,筒口流场变化特征和航行体水中运动阶段的动力学。
分析了航行体表面的压力变化规律和运动特性,并考虑了横向来流对垂直发射的影响。
设计了水下航行体连续垂直发射的实验系统,完成了单发航行体的水下发射实验。
研究了单发航行体发射出筒过程的空泡轮廓特征,分析了发射规程中产生的回射流现象,提取了航行体的运动学特征,并对航行体发射出筒后产生的水锤效
应进行了分析。
此外还研究了艇速影响时的空泡形态变化,运动轨迹等规律。
对于两发航行体的连续发射过程,对比了半球头头型和锥形头型的航行体发射过程的多相流流场特征,分析了首发航行体和次发航行体运动轨迹、空泡轮廓特征、空泡直径与长度变化规律、偏转角度变化等规律。
研究了出筒速度、潜艇的艇速和两发航行体的发射时序等因素对航行体连续发射过程的影响。
气动式水下发射装置的可调节发射阀仿真研究
气动式水下发射装置的可调节发射阀仿真研究
李忠杰;王树宗;练永庆;陈宜辉
【期刊名称】《系统仿真学报》
【年(卷),期】2005(17)12
【摘要】为实现气动式水下武器发射装置对不同武器出管速度的调节,提出了使用新型可调节发射阀的气动式水下武器发射装置的实现方案。
根据该方案建立了内弹道数学模型,并进行了系统仿真。
仿真结果表明:所提出的实现方案是可行的。
【总页数】3页(P3074-3075)
【关键词】内弹道;可调节发射阀;气动式水下武器发射装置;教学模型
【作者】李忠杰;王树宗;练永庆;陈宜辉
【作者单位】海军工程大学兵器新技术应用研究所
【正文语种】中文
【中图分类】TJ635
【相关文献】
1.提拉缸式发射装置水下发射内弹道仿真研究 [J], 刁宏伟;李宗吉;李春来;
2.水压平衡式水下发射装置的可调节发射阀研究 [J], 陈宜辉;王树宗;练永庆;李忠杰
3.气动式水下发射器的发射阀仿真设计研究 [J], 练永庆;王树宗;陈一雕
4.提拉缸式发射装置水下发射内弹道仿真研究 [J], 刁宏伟;李宗吉;李春来
5.气动式水下武器发射装置节流阀流通面积研究 [J], 练永庆;王树宗;李志华
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水下航行器-发射筒间隙流动仿真
刘元清;张晨星;陈香言;王凡瑜
【期刊名称】《水下无人系统学报》
【年(卷),期】2022(30)4
【摘要】针对水下航行器发射尾部经过气密环时发射筒底与气密腔连通过程,采用动边界非定常数值仿真,研究了不同初始压比与航行器运动速度下航行器-发射筒间隙内的流场演化与压力脉动特性。
结果表明,尾部连通初期筒底高温高压气体进入间隙腔的瞬时速度可达音速以上,气流在冲击远离筒底的气密环后反射并产生剧烈的流动振荡和压力脉动。
随着航行器运动,连通区增加压力脉动幅值下降;当初始压比增加时,压力脉动峰值和谷值线性变化,在初始压比p_(t)/p_(0)=3.0时相对峰值和谷值分别可达1.4倍和0.5倍间隙初始压力;航行器运动速度增加时泄漏速度增大,压力脉动峰值增大且出现时间提前;以上参数下压力脉动周期不变。
【总页数】7页(P450-456)
【作者】刘元清;张晨星;陈香言;王凡瑜
【作者单位】北京宇航系统工程研究所
【正文语种】中文
【中图分类】TJ630.1;U674.941
【相关文献】
1.水下航行器弹射式发射装置筒壁开孔对内弹道的影响
2.弹射式水下航行器发射装置发射筒内径对内弹道的影响
3.航行器水下筒式发射过程中浮筒水面分离运动仿
真4.单筒多细长体航行器水下齐射载荷特性仿真5.单筒多细长体航行器水下齐射载荷特性仿真
因版权原因,仅展示原文概要,查看原文内容请购买。