第六届全国大学生机械创新设计大赛全国一等奖:便携式多功能制图架ppt
机械创新设计大赛的发展与第六届主题解析(518)PPT课件
27.09.2020
*
4
3、大赛的组织与领导
主办单位:全国大学生机械创新设计大赛组委会、 教育部机械基础课程教学指导分委员会;
承办单位:全国机械原理教学研究会、全国机械设计教 学研究会、金工研究会;
合作企业——(中国教学仪器设备总公司) 决赛承办单位:国内各高校——(第二炮兵工程大学) 大赛日常工作:大赛组委会秘书处。 预赛组织评审工作:各省(自治区、直辖市)组委会
等院校之间的互相学习和经验交流; • 全国决赛中引入“性能-价格比”的模糊评价概念; • 全国决赛答辩中增加“加工工艺”知识提问环节。
27.09.2020
*
19
4、大赛历程(续)
第四届大赛
▲ 2009年5月,在南京“ 第四届机械类课程报告论坛” 上发布了大赛主题,大赛主题 为: “珍爱生命、奉献社会” ,内容为“在突发灾难中,用 于救援、破障、逃生、避难的 机械产品的设计与制作”。
27.09.2020
*
23
27.09.2020
*
24
▲ 第四届全国大学生机械创新设计大赛的特色:
• 巡视员对赛区预赛进行了异地巡视; • 进行了全国决赛的初评——保证了全国决赛高水
平和获奖率不变; • 要求分省成立赛区,进一步推动各省、市、自治
区的高校参与大赛活动; • 50%左右的决赛作品申报专利。
27.09.2020
*
25
4、大赛历程(续)
第五届大赛
▲ 2011年5月,在广州“
第六届机械类课程报告论坛”
上发布了大赛主题,大赛主题
为: “幸福生活——今天和
明天”,内容为“休闲娱乐机
械和家庭用机械的设计和制作
。”
27.09.2020
全国大学生机械工程创新设计大赛获奖案例《便携式水果采摘装置》
便携式水果采摘装置本案例荣获全国大学生机械工程创新设计大赛一等奖1.设计目的我国不仅是水果生产大国,同时也是第一消费国。
国民对水果旺盛的需求为果园种植业创造了巨大的市场,果园种植业具有广阔的发展前景。
传统人工釆摘的方式易造成果实损伤,同时,采摘不及时将会导致经济上的损失。
为了节约人力物力,提高果农的经济效益,开展采摘器械的研究有重要的意义。
目前普遍使用的半自动机械式釆摘器对外界环境伤害大、通用性差、操作复杂。
基于这样的研究现状,我们设计了一种新型的电动机械式采摘机。
该器械采摘时对外界环境干扰小、工作可靠方便、通用性强,适用于大多数果园种植水果的釆摘。
2.工作原理根据分离果树与果实的方式,目前大部分末端执行器大体分为两类:第一类是强行拉断果梗来实现果实与果树的分离;第二类是先用夹具加紧果实,再通过剪刀、锯条、高压水枪、激光等工具切断果梗,从而将水果从果树上釆摘下来。
第一类采摘执行末端容易拉断其他枝条,对果树的伤害较大。
而第二类采摘执行末端也存在较多缺点:其一,执行器在切断果梗之前,要先用夹具夹住果实,夹具的夹紧力很难控制,过小会导致果实脱落,过大则会损坏水果;其二,准确抓取果实对机器人视觉系统以及机械手的控制要求较高,微小的误差都会导致采摘失败。
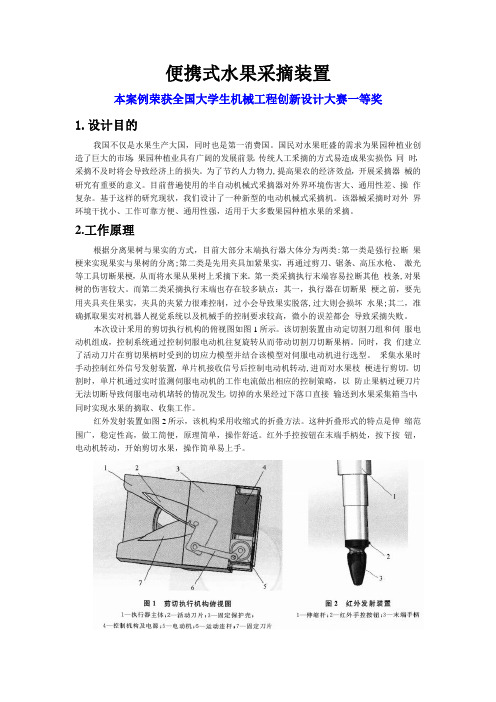
本次设计釆用的剪切执行机构的俯视图如图1所示。
该切割装置由动定切割刀组和伺服电动机组成,控制系统通过控制伺服电动机往复旋转从而带动切割刀切断果柄。
同时,我们建立了活动刀片在剪切果柄时受到的切应力模型并结合该模型对伺服电动机进行选型。
釆集水果时手动控制红外信号发射装置,单片机接收信号后控制电动机转动,进而对水果枝梗进行剪切。
切割时,单片机通过实时监测伺服电动机的工作电流做出相应的控制策略,以防止果柄过硬刀片无法切断导致伺服电动机堵转的情况发生。
切掉的水果经过下落口直接输送到水果采集箱当中,同时实现水果的摘取、收集工作。
红外发射装置如图2所示,该机构釆用收缩式的折叠方法。
04-第六届全国机械创新设计大赛一等奖:幻梦全方位多媒体模型展示台

第六届全国大学生机械创新设计大赛幻梦全方位多媒体模型展示台设计计算说明书西南交通大学指导老师:张祖涛孟冠军设计者:陈晓昊丁维高黄熙刘富涛王岩设计单位:西南交通大学机械工程学院西南交通大学目录第一章 问题的提出 (2)1.1 产品设计背景 (2)1.2 产品问题提出 (2)1.3 产品创新点 (3)第二章 整体方案设计 (4)2.1 设计要求 (4)2.2 方案设计 (4)2.2.1 全方位观察运动方案的确定 (4)2.2.2 展开收纳机构的确定 (5)2.2.3 机械调焦机构的确定 (5)2.3 总体方案阐述 (5)第三章 全方位观察机构的研究与设计 (7)3.1 全方位观察功能的实现 (7)3.2 载物台的无轴自定心机构 ........................................ 7 3.21 无轴自定心机构方案的提出.................................................................................................................................................................................7 3.2 载物台的轴向定位设计 ...................................... 7 3.2 载物台的定位位置设计 ...................................... 8 3.24 载物台的三维模型建立 ...................................... 9 3.25 载物台的强度校核 .......................................... 9 3.3 摄像机的旋转运动设计 .. (11)第四章 双“蔡氏”机械调焦机构的研究与设计 (12)4.1 机械调焦功能的实现 (12)4.2 双“蔡氏”直线运动方案的提出 (12)4.3 双“蔡氏”直线机构运动学解析设计 (13)4.3.1 双“蔡氏”直线机构的设计计算要求 (13)4.3.2 双“蔡氏”直线机构的设计计算 (13)4.3.3 惯性力的平衡 (14)4.3.4 双“蔡氏”直线机构三维模型建立 (15)4.3.5 双“蔡氏”直线机构运动学仿真 (16)西南交通大学5.1 剪式升降机构 (17)5.1.1 剪式升降机构方案的提出 (17)5.1.2 剪式升降机构运动学解析设计 (17)5.1.3 剪式升降机构三维模型建立 (19)5.2 空间变自由度锁定机构 (19)5.2.1 空间变自由度锁定机构方案的提出 (19)5.2.2 空间变自由度锁定机构的设计计算要求 (20)5.2.3 空间变自由度锁定机构的尺寸计算 (22)5.2.4 空间变自由度锁定机构的三维模型建立 (23)第六章 控制系统的设计与分析 (24)6.1 控制系统的设计 (24)6.2 电路控制分析 (24)6.2.1 控制模块设计 (24)6.2.2 驱动模块设计 (24)6.2.3 集成电路设计 (25)第七章 展示台整体机构的设计计算 (26)7.1 全方位模型展示台整体装配方案 (26)7.1.1 剪式升降机构的装配 (26)7.1.2 载物台的装配 (26)7.1.3 摄像机旋转机构的装配 (26)7.1.4 空间变自由度锁定机构的装配 (26)7.1.5 摄像升降机构的装配 (26)7.2 整机的三维模型建立 (27)7.3 全方位模型展示台的工作过程 (27)7.4 工作参数的设计与计算 (28)7.4.1 载物台的工作参数 (28)7.4.2 摄像机旋转装置的工作参数 (28)第八章 整机选型与加工制作 (29)8.1 整机主要部件选型 (29)8.1.1 电机选型 (29)8.1.2牛眼轮选型 (30)8.1.3导轨选型 (30)8.2成员加工制作场景 (30)结束语 (32)收获与体会 (32)致谢 (32)参考文献 (33)附录 (34)附录1.1 专利受理书 (34)附录1.2 控制模块Arduino 程序源代码 (35)西南交通大学西南交通大学第一章 问题的提出1.1 产品设计背景目前高校中,在以机械类为主的各类教学场景中,常常使用三维模型进行辅助教学。
全国大学生机械创新设计大赛参赛作品
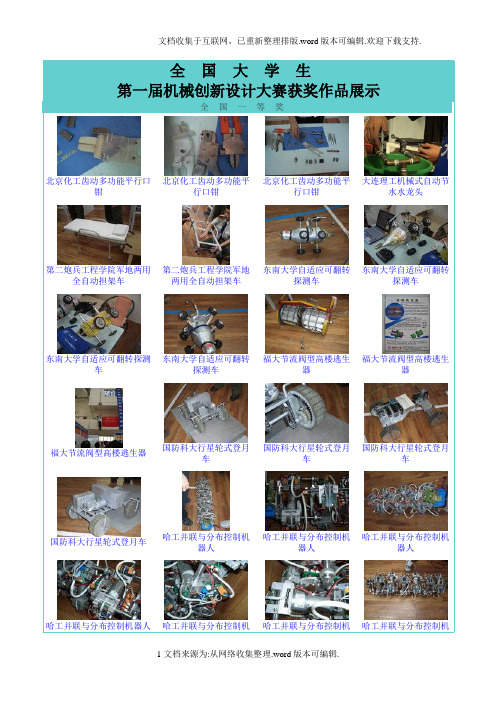
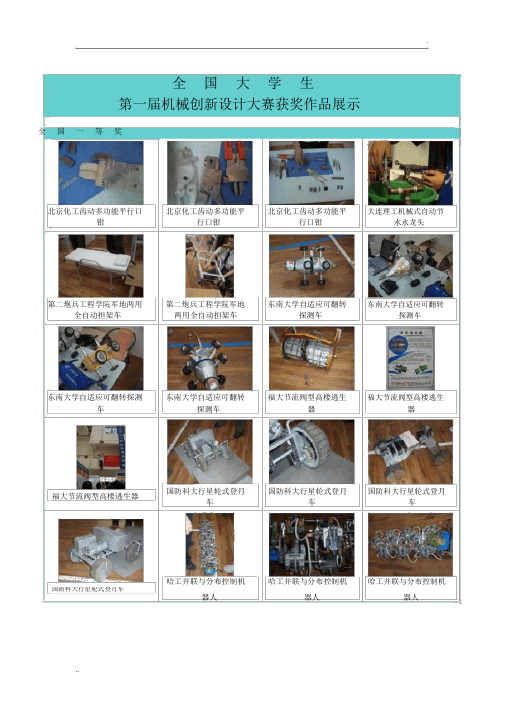
全国大学生第一届机械创新设计大赛获奖作品展示全国一等奖北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳大连理工机械式自动节水水龙头第二炮兵工程学院军地两用全自动担架车第二炮兵工程学院军地两用全自动担架车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车福大节流阀型高楼逃生器福大节流阀型高楼逃生器福大节流阀型高楼逃生器国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机哈工并联与分布控制机哈工并联与分布控制机器人器人器人哈工并联与分布控制机器人哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工大微定位仿生机器人哈工大微定位仿生机器人海军工程大学摆式特种发动机天津大学爬杆喷漆机器人天津大学爬杆喷漆机器人中国农大菌液自动抽取喷涂机中国农大菌液自动抽取喷涂机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机全国二等奖北工大助力器北工大助力器北工大助力器长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人大连理工蚯蚓爬行器大连理工蚯蚓爬行器东北大学圆柱凸轮数控铣削加工装置哈工程螺旋传动管道机器人海军工程大学舰船探测者海军工程大学舰船探测者华东理工易拉罐有偿回收装置/华南理工健身洗衣机华南农大气动式龙眼去核机华南农大气动式龙眼去核机南昌大学脉动式无极变速器上海交大可折叠崎岖表面自适应障碍小车上海交大可折叠崎岖表面自适应障碍小车西安电子科大新型球形机器人西安思源学院纱线卷绕防叠机西北工业大学方形区域喷灌龙头西南交大液压式无极变速器西南科大环卫保洁清扫自行车西南科大环卫保洁清扫自行车浙大虫虫小强浙大虫虫小强全国三等奖安徽工大新型立轴风力机北航仿生虫北航基于仿生的高适应性六足机器人北航爬杆爬管道年用机器人北科大自行车防盗锁成都大学球形机器人运动结构创新设计成都电机高专自适应上下非等高台阶小车东南大学智能机器鱼哈工大汽车同步照明灯湖大两足行走机器人华南农大机器昆虫步行机构华中科大仿生机械灵巧手昆明理工草坪剪草机兰州交大智能型全开式窗户辽宁工程技术大学爬杆爬绳机器人陕西科大揉搓式洗衣机陕西科多功能自走式清洁车四川工程职业技术学院异形齿轮泵天津大学双轴连动摩擦式翻谱台西华大学科氏加速度观察试验台新疆大学上下楼梯搬运机器人浙大仿生壁虎重庆工商大学楔铁式滚针超越离合器重庆工学院无机变速行星轮系操纵机构第二届机械创新设计大赛参赛作品展示螺旋电机爬楼梯机器人自行履带闭链两足步行机器人轻便按摩器新型三维仪自动清洁器旋转展示台仿生虫家用采棉机爬杆机器人。
机械创新设计大赛PPT模板

CLICK HERE TO ADD A TITLE
Thank you
谢谢观看
THANK YOU
演讲人姓名
CLICK HERE TO ADD A TITLE
机械创新设计大赛 ——多方位电脑支撑架
参赛人: 演讲人姓名
目
设计背景 单击此处输入标题 设计方案 单击此处输入标题 结构设计 单击此处输入标题
寝室小
A
电脑桌的 匮乏
B
设计背景
设计方案1
一体式折叠电脑桌,可折叠成箱体,由可 折叠的桌板和连接在桌板上的桌面及连接 在桌面上的凳子组成。桌板可以折叠成长 方体,板间用弹簧合叶连接。桌板顶部有 可折叠的把手,底部有可折叠的轮子,方 便移动。桌面上有固定太阳伞的插孔,在 烈日炎炎的夏天和阴雨天都可以工作,桌 面下有可左右折叠的抽屉。桌面和宣传板 之间用弹簧合叶连接,桌面和宣传板间用 可折叠的支架连接,凳子和桌面间用可折 叠的支架连接,凳子腿和凳子间用可折叠 的斜拉连接。桌面可以向宣传板方向折叠, 凳子腿可以向凳子底部折叠。凳子底部有 可以固定在自行车后座上的夹子,可以在 不完全折叠后,将桌板固定在单车后座上, 实现移动桌板。
结构设计1
托板旋转调节处细节,俯 仰角0到300度
可调。
我们所设计的结构可以实现支撑架旋转和 多方向的移动杆件的来回移动来调节适当 的角度。通过对直角转动支撑机构、直角 拐头和俯仰调节机构等的分别调节,可实 现托架各向位置及角度的调整,从而满足 床上各种姿态下操作笔记本电脑的需求。 这种结构设计看似简单,但功能十分强大, 可以实现俯仰角0-300度可调,左右360度 可调。
结构设计2
1
单击此处添加小标题
4个旋转关节,上下可调, 360旋转。
全国大学生机械创新设计大赛参赛作品

全国大学生第一届机械创新设计大赛获奖作品展示全国一等奖北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳北京化工齿动多功能平行口钳大连理工机械式自动节水水龙头第二炮兵工程学院军地两用全自动担架车第二炮兵工程学院军地两用全自动担架车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车东南大学自适应可翻转探测车福大节流阀型高楼逃生器福大节流阀型高楼逃生器福大节流阀型高楼逃生器国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车国防科大行星轮式登月车哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工并联与分布控制机器人哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工大微定位仿生机器人哈工大微定位仿生机器人海军工程大学摆式特种发动机天津大学爬杆喷漆机器人天津大学爬杆喷漆机器人中国农大菌液自动抽取喷涂机中国农大菌液自动抽取喷涂机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机重庆大学半球体螺旋沟槽数控研磨机全国二等奖北工大助力器北工大助力器北工大助力器长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人大连理工蚯蚓爬行器大连理工蚯蚓爬行器东北大学圆柱凸轮数控铣削加工装置哈工程螺旋传动管道机器人海军工程大学舰船探测者海军工程大学舰船探测者华东理工易拉罐有偿回收装置/华南理工健身洗衣机华南农大气动式龙眼去核机华南农大气动式龙眼去核机南昌大学脉动式无极变速器上海交大可折叠崎岖外表自适应障碍小车上海交大可折叠崎岖外表自适应障碍小车西安电子科大新型球形机器人西安思源学院纱线卷绕防叠机西北工业大学方形区域喷灌龙头西南交大液压式无极变速器西南科大环卫保洁清扫自行车西南科大环卫保洁清扫自行车浙大虫虫小强浙大虫虫小强全国三等奖安徽工大新型立轴风力机北航仿生虫北航基于仿生的高适应性六足机器人北航爬杆爬管道年用机器人北科大自行车防盗锁成都大学球形机器人运动结构创新设计成都电机高专自适应上下非等高台阶小车东南大学智能机器鱼哈工大汽车同步照明灯湖大两足行走机器人华南农大机器昆虫步行机构华中科大仿生机械灵巧手昆明理工草坪剪草机兰州交大智能型全开式窗户辽宁工程技术大学爬杆爬绳机器人陕西科大揉搓式洗衣机陕西科多功能自走式清洁车四川工程职业技术学院异形齿轮泵天津大学双轴连动摩擦式翻谱台西华大学科氏加速度观察试验台新疆大学上下楼梯搬运机器人浙大仿生壁虎重庆工商大学楔铁式滚针超越离合器重庆工学院无机变速行星轮系操纵机构第二届机械创新设计大赛参赛作品展示螺旋电机爬楼梯机器人自行履带闭链两足步行机器人轻便按摩器新型三维仪自动清洁器旋转展示台仿生虫家用采棉机爬杆机器人。
全国大学生机械创新设计大赛参赛作品
.全国大学生第一届机械创新设计大赛获奖作品展示全国一等奖北京化工齿动多功能平行口北京化工齿动多功能平北京化工齿动多功能平大连理工机械式自动节钳行口钳行口钳水水龙头第二炮兵工程学院军地两用第二炮兵工程学院军地东南大学自适应可翻转东南大学自适应可翻转全自动担架车两用全自动担架车探测车探测车东南大学自适应可翻转探测东南大学自适应可翻转福大节流阀型高楼逃生福大节流阀型高楼逃生车探测车器器福大节流阀型高楼逃生器国防科大行星轮式登月国防科大行星轮式登月国防科大行星轮式登月车车车哈工并联与分布控制机哈工并联与分布控制机哈工并联与分布控制机国防科大行星轮式登月车器人器人器人.哈工并联与分布控制机器人哈工并联与分布控制机器人哈工程仿生机器蟹天津大学爬杆喷漆机器人重庆大学半球体螺旋沟槽数控研磨机哈工并联与分布控制机哈工并联与分布控制机哈工并联与分布控制机器人器人器人哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹哈工大微定位仿生机器哈工大微定位仿生机器海军工程大学摆式特种人人发动机天津大学爬杆喷漆机器中国农大菌液自动抽取中国农大菌液自动抽取人喷涂机喷涂机重庆大学半球体螺旋沟重庆大学半球体螺旋沟槽数控研磨机槽数控研磨机全国二等奖北工大助力器北工大助力器北工大助力器长春理工轮足式机器人.长春理工轮足式机器人长春理工轮足式机器人长春理工轮足式机器人大连理工蚯蚓爬行器大连理工蚯蚓爬行器东北大学圆柱凸轮数控哈工程螺旋传动管道机器海军工程大学舰船探测者铣削加工装置人海军工程大学舰船探测华东理工易拉罐有偿回/华南理工健身洗衣机华南农大气动式龙眼去核者收装置机华南农大气动式龙眼去南昌大学脉动式无极变上海交大可折叠崎岖表面上海交大可折叠崎岖表面核机速器自适应障碍小车自适应障碍小车西安电子科大新型球形西安思源学院纱线卷绕西北工业大学方形区域喷西南交大液压式无极变速机器人防叠机灌龙头器西南科大环卫保洁清扫西南科大环卫保洁清扫浙大虫虫小强浙大虫虫小强自行车自行车全国三等奖.安徽工大新型立轴风力机北科大自行车防盗锁哈工大汽车同步照明灯昆明理工草坪剪草机陕西科多功能自走式清洁车新疆大学上下楼梯搬运机器人北航基于仿生的高适应北航爬杆爬管道年用机北航仿生虫器人性六足机器人成都大学球形机器人运成都电机高专自适应上动结构创新设计东南大学智能机器鱼下非等高台阶小车华南农大机器昆虫步行华中科大仿生机械灵巧湖大两足行走机器人手机构兰州交大智能型全开式辽宁工程技术大学爬杆窗户陕西科大揉搓式洗衣机爬绳机器人四川工程职业技术学院天津大学双轴连动摩擦西华大学科氏加速度观异形齿轮泵式翻谱台察试验台重庆工商大学楔铁式滚重庆工学院无机变速行浙大仿生壁虎星轮系操纵机构针超越离合器.第二届机械创新设计大赛参赛作品展示螺旋电机爬楼梯机器人自行履带闭链两足步行机器人轻便按摩器新型三维仪自动清洁器旋转展示台仿生虫家用采棉机爬杆机器人。
第六届全国大学生机械创新设计大赛参赛作品
第六届全国大学生机械创新设计大赛参赛作品点的合成运动的演示与验证实验装置设计说明书设计者:姜红山葛茂叶振齐王焱陈关国指导老师:王涛杨丹武汉科技大学机械自动化学院点的合成运动演示与验证实验装置设计说明书设计者:姜红山葛茂叶振齐陈关国王焱指导老师:王涛杨丹武汉科技大学机械自动化学院作品内容简介在大学理论力学课程学习中,关于点的合成运动这一重要章节中,关于牵连速度、相对速度和绝对速度的概念只是通过理论来阐述,对于初学者显得十分抽象且难以理解,从而给后面章节的学习带来困难,为了能让同学们能更好的学习、理解并掌握这些理论,本小组特设计了一套点的合成运动的演示与验证的实验装置演示各速度间的关系并验证点的合成运动公式的正确性。
本套实验装置分为平行四边形机架、滑块导轨、电机、连杆、曲柄、滑块、速度测量系统以及画板几个部分。
曲柄、连杆、滑块导轨和平行四边形机架组成一个曲柄滑块机构,该机构由安装在平行四边形上的电机驱动,在滑块导轨上安装一个曲柄滑块机构,该机构由曲柄、连杆、滑块以及滑块导轨组成,其也是由电动机驱动。
电机工作时,通过曲柄滑块机构驱动滑块导轨运动,滑块导轨上的曲柄滑块机构被电机驱动,使得滑块沿滑块导轨上的沟槽运动,安装在机架上的速度传感器则可以测量滑块的速度,在此过程中,机架模拟静坐标系,滑块导轨模拟动坐标系,滑块模拟质点,通过观察机架、滑块导轨和滑块间的运动关系即可清晰的演示出各速度以及各速度间的关系。
运用曲柄滑块的机构分析,可以分别计算出理论上的牵连速度和相对速度,然后根据点的合成运动运动公式便可以计算出点的绝对速度,通过绝对速度的理论计算值与速度传感器测得的值相比较,即可以验证点的合成运动公式的正确性。
研制背景及意义理论力学课程几乎是所有工科学生必须深刻理解和重点掌握的科目,但是大多数章节的内容基本都是抽象的理论阐述,没有相应的实验器材去演示与验证各章节的理论与公式。
在点的合成运动这一章节,牵连速度、相对速度和绝对速度对于初学者十分容易造成混淆,而且也让老师详细清楚的讲解该章节的内容带来了困难。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.产品优点及创新点
(5)曲柄滑块角度调节机构:实现制图角 度可连续调节。
西南交通大学版权所有
卡槽式角度调节
3.产品优点及创新点
(6)多种自锁机构:自锁可靠,使用方便。
(7)产品西面南向交广通大大学学生,版简权约所的有机械结构
易于批量生产,制造成本低,是既经济又实 用的制图帮手。
曲柄滑块机构
偏心自锁机构
板面扩展 绞盘式旋转机构 插销定位机构
2.项目简介
西南交通大学版权所有
空间同心六连 杆升降机构
插销锁定机构
2.项目简介
功能
调节机构
状态锁定
制图架
高度调节 空间连杆升降机构 插销锁定机构
西南交通大学版权所有
角度调节
曲柄滑块机构
偏心自锁机构
板面扩展 绞盘式旋转机构 插销定位机构
3.产品优点及创新点
产品已申请发明专利一项, 实用新型专利两项(授权一项)
发明专利号:西南交通大学版权所有
2014071700576390 授权实用新型专利号: 201420181602.7 实用新型专利号: 2014071700622690
4.应用前景及总结
(1)该制图架切实解决学生的制图问题, 成批生产后成本低,易于在全国所有理工
便携式多功能制图架
西南交通大指组学导版老员师权::所吴张祖有涛潇 何春燕 潘宏烨
张念业 梁大伟
西南交通大学版权所有
1.项目背景
传统制图方式需要改良
西南交通大学版权所有
水平桌面制图效率低下
西南交通大学版权所有
2.项目简介
2.1产品功能 (1)自由调节制图板高度。
(西2)南自交由通调大节学制图版板权角所度有。
2.3制作过程
(1)建模过程:solidworks等软件进行实体建模 仿真及加工工程图的制作。
(割2等)机加床工进工行西程零南:件使交加用通工数。大控学机床版,权立所式钻有床,线切
2.项目简介
产品加工场景
西南交通大学版权所有
2.项目简介 2.4产品使用方法
西南交通大学版权所有
3.产品优点及创新点
(1)便携可移动:制图地点灵活多变。 (2)可调节制图板位置:符合人机工效学
原理。 西南交通大学版权所有
3.产品优点及创新点
(3)绞盘式旋转扩大结构:匹配不同大小 的制图板,调节一步到位。
西南交通大学版权所有
3.产品优点及创新点
(4)连杆升降机构:利用空间结构实现高 度调节,设计独特,所占空间小,方便收纳。
2.项目简介
西南交通大学版权所有
曲柄滑块机构
偏心自锁机构
2.项目简介
功能
调节机构
状态锁定
制图架
高度调节 空间连杆升降机构 插销锁定机构
西南交通大学版权所有
角度调节
曲柄滑块机构
偏心自锁机构
板面扩展 绞盘式旋转机构 插销定位机构
2.项目简介
西南交通大学版权所有
绞盘式旋转扩大机构
插销定位机构
2.项目简介
(3)可供不同型号图板使用。 (4)体积小巧,便于携带。 (5)任何教室均可制图。
2.项目简介 2.2结构设计
产品总体采用轻便灵巧的框架式结构, 配合木质制图板和桌面使用。
西南交通大学版权所有
2.项目简介
功能
调节机构
状态锁定
制图架
高度调节 空间连杆升降机构
插销锁定机构
西南交通大学版权所有
角度调节
科院校推广西使南用交。通大学版权所有
(2)有较强的多种行业和课程的兼容性 和普及性。 可以应用于艺术,建筑等领域 的绘图。
西南交通大学版权所有