stm32f103的库函数的例程
stm32串口接收字符串函数

竭诚为您提供优质文档/双击可除stm32串口接收字符串函数篇一:sTm32串口库函数版例程sTm32串口库函数版例程定义:TxD1-----pA9-us1-TxRxD1-----pA10-us1-Rx速率:115200,n,8,1[cpp]viewplaincopyprint?1./*Includes------------------------------------------------------------------*/2.#include"stm32f10x.h"3.#include"platform_config.h"4.#include"stm32f10x_usart.h"5.#include"misc.h"6.#include"stdarg.h"7.8.9.10./*privatevariables---------------------------------------------------------*/ART_InitTypeDefusART_Initstructure;12.uint8_tTxbuffer1[]="usARTInterruptexample:Thisis usART1Demo";13.uint8_tRxbuffer1[],rec_f,tx_flag;14.__Iouint8_tTxcounter1=0x00;15.__Iouint8_tRxcounter1=0x00;16.17.uint32_tRec_Len;18.19.20./*privatefunctionprototypes-----------------------------------------------*/21.voidRcc_configuration(void);22.voidgpIo_configuration(void);23.voidnVIc_configuration(void);24.25.voidDelay(__Iouint32_tncount);26.voidusART_ouT(usART_TypeDef*usARTx,uint8_t*Data, ...);27.char*itoa(intvalue,char*string,intradix);28.voidusART_config(usART_TypeDef*usARTx);29.30.31.gpIo_InitTypeDefgpIo_Initstructure;ART_InitTypeDefusART_Initstruct;ART_clockInitTypeDefusART_clockInitstruct;34.35./*********************************************** *****************************36.*名称:voidili9325_Drawpicture(u16startx,u16startY,u8Dir,u8*pic)37.*功能:在指定座标范围显示一副图片38.*入口参数:startx行起始座标39.*startY列起始座标40.*Dir图像显示方向41.*pic图片头指针42.*出口参数:无43.*说明:图片取模格式为水平扫描,16位颜色模式取模软件img2LcD44.*调用方法:ili9325_Drawpicture(0,0,0,(u16*)demo);45.************************************************ ****************************/46.voidusART_config(usART_TypeDef*usARTx){ART_ART_baudRate=115200;//速率115200bpsART_ART_wordLength=usART_wordL ength_8b;//数据位8位ART_ART_stopbits=usART_stopbits_1;//停止位1位ART_ART_parity=usART_parity_no ;//无校验位ART_ART_hardwareFlowcontrol=us ART_hardwareFlowcontrol_none;//无硬件流控ART_ART_mode=usART_mode_Rx|usA RT_mode_Tx;//收发模式53.54./*configureusART1*/ART_Init(usARTx,//配置串口参数函数56.57.58./*enableusART1ReceiveandTransmitinterrupts*/ART_ITconfig(usART1,usART_IT_Rxne,enAbLe);//使能接收中断ART_ITconfig(usART1,usART_IT_Txe,enAbLe);//使能发送缓冲空中断61.62./*enabletheusART1*/ART_cmd(usART1,enAbLe);64.}65./*********************************************** *****************************66.*名称:intmain(void)67.*功能:主函数68.*入口参数:无69.*出口参数:无70.*说明:71.*调用方法:无72.****************************************************************************/73.intmain(void)74.{75.76.uint8_ta=0;77./*systemclocksconfiguration*/78.Rcc_configuration();//系统时钟设置79.80./*嵌套向量中断控制器81.说明了usART1抢占优先级级别0(最多1位),和子优先级级别0(最多7位)*/82.nVIc_configuration();//中断源配置83.84./*对控制LeD指示灯的Io口进行了初始化,将端口配置为推挽上拉输出,口线速度为50mhz。
stm32f103 cdc例子

stm32f103 cdc例子STM32F103 是一款基于 ARM Cortex-M3 内核的微控制器,其具有多种通信接口,其中之一就是 USB 通信接口(USB CDC 类)。
下面是一个基于STM32F103 的 USB CDC 示例代码,用于实现通过 USB 接口与计算机进行串口通信。
首先,需要在 STM32CubeMX 中启用 USB 通信,并配置为 CDC 类。
然后,需要编写 USB 通信的代码。
以下是一个基于 HAL 库的 USB CDC 示例代码:```cinclude ""include "usb_"include "usbd_cdc_"/ Private function prototypes /static void SystemClock_Config(void);static void Error_Handler(void);static void MX_GPIO_Init(void);/ Private variables /static uint8_t CDC_Device[64];static uint8_t CDC_Config[64];static uint8_t CDC_Interface[64];static uint8_t CDC_Data[64];int main(void){HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USB_DEVICE_Init();MX_USBD_CDC_Init();while (1){/ Your main application code goes here / }}{/ You can add your code here to configure the system clock / }static void Error_Handler(void){/ You can add your code here to handle any errors that occur / }static void MX_GPIO_Init(void){/ You can add your code here to initialize the GPIO /}static void MX_USB_DEVICE_Init(void){/ You can add your code here to initialize the USB device /}```。
stm32f103通用定时器pwm应用例程--蜂鸣器演奏乐曲
stm32f103通用定时器pwm应用例程--蜂鸣器演奏乐曲STM32F103通用定时器PWM应用例程:蜂鸣器演奏乐曲一(说明:本例程是将流明LM3SLib_Timer.pdf文档中的例程9及例程10(PWM应用:蜂鸣器演奏乐曲),移植到STM32F103上。
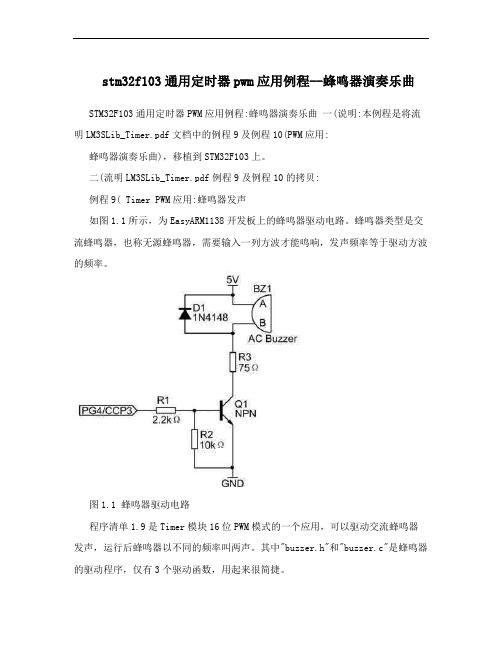
二(流明LM3SLib_Timer.pdf例程9及例程10的拷贝:例程9( Timer PWM应用:蜂鸣器发声如图1.1所示,为EasyARM1138开发板上的蜂鸣器驱动电路。
蜂鸣器类型是交流蜂鸣器,也称无源蜂鸣器,需要输入一列方波才能鸣响,发声频率等于驱动方波的频率。
图1.1 蜂鸣器驱动电路程序清单1.9是Timer模块16位PWM模式的一个应用,可以驱动交流蜂鸣器发声,运行后蜂鸣器以不同的频率叫两声。
其中"buzzer.h"和"buzzer.c"是蜂鸣器的驱动程序,仅有3个驱动函数,用起来很简捷。
程序清单1.9 Timer PWM应用:蜂鸣器发声文件:main.c#include "systemInit.h"#include "buzzer.h"// 主函数(程序入口)int main(void) {jtagWait(); // 防止JTAG失效,重要~clockInit(); // 时钟初始化:晶振,6MHzbuzzerInit(); // 蜂鸣器初始化buzzerSound(1500); // 蜂鸣器发出1500Hz声音SysCtlDelay(400* (TheSysClock / 3000)); // 延时约400ms buzzerSound(2000); // 蜂鸣器发出2000Hz声音SysCtlDelay(800* (TheSysClock / 3000)); // 延时约800ms buzzerQuiet( ); // 蜂鸣器静音for (;;) {}}文件:buzzer.h#ifndef __BUZZER_H__#define __BUZZER_H__// 蜂鸣器初始化extern void buzzerInit(void);// 蜂鸣器发出指定频率的声音extern void buzzerSound(unsigned short usFreq); // 蜂鸣器停止发声extern void buzzerQuiet(void);1#endif // __BUZZER_H__文件:buzzer.c#include "buzzer.h"#include <hw_types.h>#include <hw_memmap.h> #include <sysctl.h>#include <gpio.h>#include <timer.h>#define PART_LM3S1138#include <pin_map.h> #define SysCtlPeriEnable SysCtlPeripheralEnable #define GPIOPinTypeOut GPIOPinTypeGPIOOutput// 声明全局的系统时钟变量extern unsigned long TheSysClock;// 蜂鸣器初始化void buzzerInit(void){SysCtlPeriEnable(SYSCTL_PERIPH_TIMER1); // 使能TIMER1模块SysCtlPeriEnable(CCP3_PERIPH); // 使能CCP3所在的GPIO端口GPIOPinTypeTimer(CCP3_PORT, CCP3_PIN); // 设置相关管脚为Timer功能TimerConfigure(TIMER1_BASE, TIMER_CFG_16_BIT_PAIR | // 配置TimerB为16位PWM TIMER_CFG_B_PWM); }// 蜂鸣器发出指定频率的声音// usFreq是发声频率,取值 (系统时钟/65536)+1 , 20000,单位:Hz void buzzerSound(unsigned short usFreq) {unsigned long ulVal;if ((usFreq <= TheSysClock / 65536UL) || (usFreq > 20000)) {buzzerQuiet( );}else {GPIOPinTypeTimer(CCP3_PORT, CCP3_PIN); // 设置相关管脚为Timer功能ulVal = TheSysClock / usFreq;TimerLoadSet(TIMER1_BASE, TIMER_B, ulVal); // 设置TimerB初值TimerMatchSet(TIMER1_BASE, TIMER_B, ulVal / 2); // 设置TimerB匹配值TimerEnable(TIMER1_BASE, TIMER_B); // 使能TimerB计数 }}// 蜂鸣器停止发声void buzzerQuiet(void){TimerDisable(TIMER1_BASE, TIMER_B); // 禁止TimerB计数GPIOPinTypeOut(CCP3_PORT, CCP3_PIN); // 配置CCP3管脚为GPIO输出GPIOPinWrite(CCP3_PORT, CCP3_PIN, 0x00); // 使CCP3管脚输出低电平 } 例程10(Timer PWM应用:蜂鸣器演奏乐曲程序清单1.10是Timer模块16位PWM模式的一个应用,能驱动交流蜂鸣器演奏一首动听的乐曲《化蝶》(乐谱参见图1.2)。
ad7606stm32f103例程
ad7606stm32f103例程摘要:1.AD7606STM32F103 例程简介2.AD7606STM32F103 例程的功能和特点3.AD7606STM32F103 例程的使用方法和注意事项4.AD7606STM32F103 例程的发展前景和应用领域正文:一、AD7606STM32F103 例程简介AD7606STM32F103 例程是一款基于STM32F103 微控制器的AD7606 触摸屏控制器的示例程序。
该例程旨在帮助开发人员快速掌握AD7606 触摸屏控制器的使用方法,并实现触摸屏功能。
二、AD7606STM32F103 例程的功能和特点1.功能:AD7606STM32F103 例程主要实现了触摸屏的初始化、校准、触摸检测以及绘制触摸屏图标等功能。
2.特点:该例程具有以下特点:(1)简单易用:例程提供了丰富的函数库,开发人员只需调用相应的函数即可实现触摸屏功能,降低了开发难度。
(2)兼容性强:该例程支持不同型号的STM32F103 微控制器和AD7606 触摸屏控制器,具有较强的兼容性。
(3)扩展性强:例程提供了可扩展的接口,开发人员可以根据需要进行二次开发,实现更多功能。
三、AD7606STM32F103 例程的使用方法和注意事项1.使用方法:(1)下载并安装STM32CubeIDE 开发环境。
(2)将AD7606STM32F103 例程导入STM32CubeIDE 中,并配置相关参数。
(3)编译代码并下载到STM32F103 微控制器。
(4)运行程序,观察触摸屏功能是否正常。
2.注意事项:(1)在使用例程前,请确保已正确连接硬件设备。
(2)在编译代码时,请确保所选的编译器和编译选项与硬件平台相匹配。
(3)运行程序时,请注意观察触摸屏的反应,避免误操作导致硬件损坏。
四、AD7606STM32F103 例程的发展前景和应用领域1.发展前景:随着物联网、智能家居等技术的发展,触摸屏在各类设备中的应用越来越广泛。
stm32f103标准库例程

stm32f103标准库例程一、概述本文档旨在为STM32F103标准库的使用者提供一个完整的例程,帮助初学者快速了解和掌握STM32F103标准库的使用方法。
本例程涵盖了STM32F103标准库的基本概念、常用外设的使用方法以及代码编写规范。
STM32F103标准库是STMicroelectronics公司为STM32F103系列微控制器提供的软件开发库。
该库提供了一系列的嵌入式软件工具和API,简化了STM32F103系列微控制器的软件开发过程,缩短了开发周期。
三、例程内容1. 外设配置及初始化在编写代码之前,需要对STM32F103标准库所支持的外设进行配置和初始化。
本例程将介绍如何配置和初始化常用的外设,如GPIO、UART、SPI、I2C等。
2. 代码编写规范为了提高代码的可读性和可维护性,本例程将介绍STM32F103标准库的代码编写规范,包括变量命名规则、注释规范、代码缩进和排版等。
3. 常用函数示例本例程将提供一些常用的函数示例,包括GPIO输出、UART发送和接收、SPI 传输、I2C通信等。
这些示例代码将帮助您更好地理解如何使用STM32F103标准库。
4. 串口通信示例本例程将提供一个串口通信的示例代码,包括串口初始化、数据发送和接收等操作。
通过这个示例,您可以了解如何使用STM32F103标准库实现串口通信功能。
四、代码示例以下是一个简单的STM32F103标准库代码示例,用于控制LED灯的闪烁:```c#include "stm32f10x.h"#include "stm32f10x_std_lib.h"void LED_Init(void) {GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);}void main(void) {LED_Init();while(1) {GPIO_SetBits(GPIOA, GPIO_Pin_0); // 亮起LED灯delay(500); // 延时500msGPIO_ResetBits(GPIOA, GPIO_Pin_0); // 熄灭LED灯delay(500); // 延时500ms}}```五、总结本文档为STM32F103标准库提供了一个完整的例程,涵盖了外设配置及初始化、代码编写规范、常用函数示例以及串口通信示例等内容。
STM32F103_正交编码器接口应用笔记

Abstract --- The quadrature encoder which is very popular in the motor servo control application, known as a 2-channel incremental encoder, converts linear displacementinto a pulse signal. By monitoring the number of pulses and the relative phase of thetwo signals you can track the position, the direction of rotation and speed. In ddition,a third channel, or index signal, can be used to reset the position counter.STM3210x which is the MCU based on ARM latest core - Cortex-M3, integrates thequadrature encoder interface. Accordingly STM3210x can handles the encodersignal without any CPU overhead which it is possible for CPU to focus on the vectorcontrol.在马达控制类应用中, 正交编码器可以反馈马达的转子位置及转速信号。
TM32F10x 系列MCU集成了正交编码器接口,增量编码器可与MCU直接连接而无需外部接口电路。
该应用笔记详细介绍了STM32F10x与正交编码器的接口,并附有相应的例程,使用户可以很快地掌握其使用方法。
1正交编码器原理正交编码器实际上就是光电编码器,分为增量式和绝对式,较其它检测元件有直接输出数字量信号,惯量低,低噪声,高精度,高分辨率,制作简便,成本低等优点。
stm32f103 dma案例

stm32f103 dma案例STM32F103 DMA(Direct Memory Access)是一种用于高效数据传输的技术,通过在外设和内存之间设置数据传输通道,可以减轻CPU 的负担,提高系统的效率。
在这里,我们将介绍一个使用STM32F103的DMA功能的案例,具体来说是使用DMA传输数据到USART串口。
首先,我们需要在STM32F103上配置USART串口和DMA通道。
我们将USART串口配置为发送模式,并且使能DMA功能。
然后,我们设置DMA通道的传输方向为从内存到外设(USART),并设置传输的数据长度以及数据传输的起始地址。
接下来,我们需要准备要发送的数据,可以是一个字符串、一个数组或者其他形式的数据。
在本例中,我们将准备一个字符串,用于发送到USART串口。
然后,我们需要编写一个函数来启动DMA传输。
在这个函数中,我们首先需要初始化并配置DMA通道。
然后,我们将准备好的数据作为源地址传递给DMA,并设置传输的长度。
最后,我们启动DMA传输。
在主函数中,我们调用启动DMA传输的函数,并通过USART串口发送了一段文本。
在运行程序时,DMA将负责将数据从内存传输到USART串口,而不需要CPU的干预。
这样,我们可以节省CPU的处理时间,并提高系统的效率。
下面是一个使用STM32F103的DMA功能的示例代码:```c#include "stm32f10x.h"#define USART1_DMA_CHANNEL DMA1_Channel4#define USART1_DMA_STREAM DMA1_Stream4#define USART1_DR_ADDRESS ((uint32_t)0x40013804)void DMA_USART_Send(char* data, uint16_t length) {DMA_InitTypeDef dmaInitStruct;/*开启DMA和USART时钟*/RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);/*初始化DMA通道*/DMA_DeInit(USART1_DMA_CHANNEL);DMA_StructInit(&dmaInitStruct);dmaInitStruct.DMA_PeripheralBaseAddr = USART1_DR_ADDRESS;dmaInitStruct.DMA_MemoryBaseAddr = (uint32_t)data;dmaInitStruct.DMA_DIR = DMA_DIR_PeripheralDST;dmaInitStruct.DMA_BufferSize = length;dmaInitStruct.DMA_PeripheralInc =DMA_PeripheralInc_Disable;dmaInitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;dmaInitStruct.DMA_PeripheralDataSize =DMA_PeripheralDataSize_Byte;dmaInitStruct.DMA_MemoryDataSize =DMA_MemoryDataSize_Byte;dmaInitStruct.DMA_Mode = DMA_Mode_Normal;dmaInitStruct.DMA_Priority = DMA_Priority_High; dmaInitStruct.DMA_M2M = DMA_M2M_Disable;DMA_Init(USART1_DMA_CHANNEL, &dmaInitStruct); /*配置USART串口*/USART_InitTypeDef usartInitStruct;USART_StructInit(&usartInitStruct); ART_BaudRate = 9600;USART_Init(USART1, &usartInitStruct);/*启动DMA传输*/DMA_Cmd(USART1_DMA_CHANNEL, ENABLE);USART_DMACmd(USART1, USART_DMAReq_Tx, ENABLE); }int main(void) {/*初始化串口*/USART_InitTypeDef usartInitStruct;USART_StructInit(&usartInitStruct);ART_BaudRate = 9600;USART_Init(USART1, &usartInitStruct);/*启动DMA传输*/char data[] = "Hello, DMA!";DMA_USART_Send(data, sizeof(data));while(1);return 0;}```以上代码中,我们使用了STM32F103的库函数来进行配置和操作,使得编程更加方便快捷。
stm32f103的ucos的json例程

STM32F103和UCOSIII (MicroC/OS-III) 是两个独立的概念。
STM32F103 是意法半导体(STMicroelectronics) 的一款微控制器,而UCOSIII 是一个实时操作系统(RTOS)。
如果你想在STM32F103 上使用UCOSIII,并且你想处理JSON 数据,那么你需要做的是:
1. **安装UCOSIII**:
UCOSIII 有多种版本,并且通常针对特定的架构进行优化。
首先,你需要从UCOSIII 的官方网站下载并安装适用于STM32F103 的版本。
2. **编写或找到JSON 处理库**:
有很多现成的JSON 解析和生成库可以用于嵌入式系统。
例如,cJSON 是一个流行的选择。
你需要将这个库集成到你的项目中。
3. **在UCOSIII 中使用JSON**:
一旦你有了UCOSIII 和一个JSON 库,你就可以在你的任务或中断服务程序中使用这些库来处理JSON 数据了。
例如,你可以从串行端口读取JSON 数据,解析它,然后基于解析的结果执行某些操作。
由于UCOSIII 和JSON 处理都可以是复杂的主题,你可能需要花费一些时间来学习如何使用它们。
至于具体的例程,很遗憾,我不能提供特定的代码或例程,因为这需要根据你的具体需求和所选择的库进行调整。
但希望上面的步骤可以帮助你开始。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
stm32f103的库函数的例程
我们来介绍一些常用的库函数。
GPIO库函数用于控制微控制器的通用输入输出引脚。
通过配置引脚的模式(输入模式、输出模式、复用功能等)、速度(低速、中速、高速)和上下拉电阻,我们可以实现对外部设备的控制。
例如,我们可以使用GPIO库函数将一个引脚配置为输出模式,并设置其输出电平为高电平,从而控制一个LED灯的亮灭。
SPI库函数用于控制STM32F103上的SPI总线。
SPI(Serial Peripheral Interface)是一种串行通信协议,常用于连接微控制器和外部设备,如传感器、存储器等。
通过SPI库函数,我们可以配置SPI总线的工作模式(主模式或从模式)、数据位宽(8位、16位等)、时钟极性和相位等参数。
使用SPI库函数,我们可以实现与外部设备的数据交换,例如读取传感器的数据或向存储器写入数据。
USART库函数用于控制STM32F103上的串行通信接口。
USART (Universal Synchronous/Asynchronous Receiver/Transmitter)是一种常用的串行通信协议,支持同步和异步通信。
通过USART 库函数,我们可以配置串行通信接口的波特率、数据位宽、停止位数等参数。
使用USART库函数,我们可以实现与外部设备的数据传输,例如与计算机进行串口通信或与无线模块进行无线通信。
定时器库函数用于控制STM32F103上的定时器。
定时器是一种常
用的计时器,可以用于测量时间间隔、定时中断等应用。
STM32F103上有多个定时器模块,每个模块包含多个定时器通道。
通过定时器库函数,我们可以配置定时器的工作模式(定时模式、输入捕获模式、输出比较模式等)、计数值和预分频值等参数。
使用定时器库函数,我们可以实现精确的定时功能,例如定时触发中断或产生PWM信号。
ADC库函数用于控制STM32F103上的模数转换器(ADC)。
ADC 是一种将模拟信号转换为数字信号的设备,常用于测量模拟量信号,如温度、光强等。
通过ADC库函数,我们可以配置ADC的工作模式(单通道模式、扫描模式等)、采样时间和参考电压等参数。
使用ADC库函数,我们可以实现对模拟信号的采样和转换,得到相应的数字数值。
除了上述介绍的几个常用的库函数之外,STM32F103的库函数还包括了许多其他功能,如定时器PWM输出、外部中断、DMA传输等。
这些库函数的使用方法和配置参数可以在ST官方提供的库函数手册中找到,开发人员可以根据自己的需求进行配置和调用。
总结一下,STM32F103的库函数提供了丰富的功能和接口,方便开发人员进行应用开发。
通过使用这些库函数,我们可以实现对外部设备的控制和数据交换,实现各种应用场景下的功能需求。
在使用库函数时,我们需要了解每个函数的功能和参数含义,并根据实
际情况进行配置和调用。
同时,我们还需要注意库函数的调用顺序和时机,以确保功能的正确实现。
通过熟练掌握STM32F103的库函数,我们可以更高效地进行嵌入式开发,并快速实现各种功能。