基准站GPS接收机
GPS测量原理与应用试卷及答案(共5套).概要
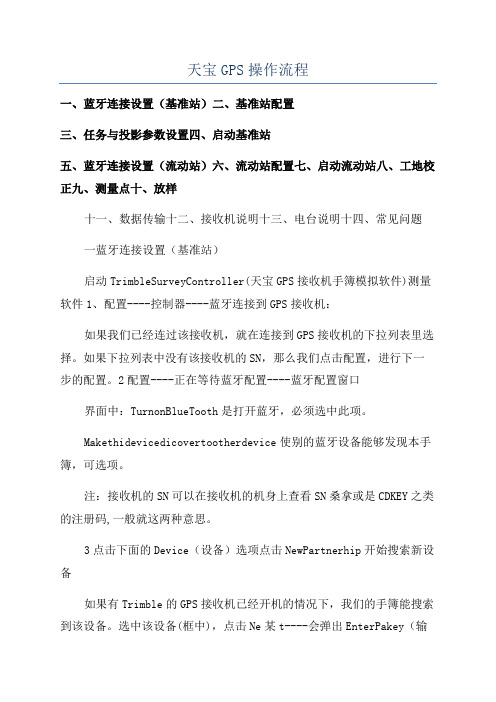
第一套一、单项选择题(每小题1分,共10分)1.计量原子时的时钟称为原子钟,国际上是以( C)为基准。
A、铷原子钟B、氢原子钟C、铯原子钟D、铂原子钟2.我国西起东经72°,东至东经135°,共跨有5个时区,我国采用( A )的区时作为统一的标准时间。
称作北京时间。
A、东8区B、西8区C、东6区D、西6区3.卫星钟采用的是GPS 时,它是由主控站按照美国海军天文台(USNO)( D )进行调整的。
在1980年1月6日零时对准,不随闰秒增加。
A、世界时(UT0)B、世界时(UT1)C、世界时(UT2)D、协调世界时(UTC)4.在20世纪50年代我国建立的1954年北京坐标系是( C)坐标系。
A、地心坐标系B、球面坐标系C、参心坐标系D、天球坐标系5. GPS定位是一种被动定位,必须建立高稳定的频率标准。
因此每颗卫星上都必须安装高精确度的时钟。
当有1×10— 9s的时间误差时,将引起( B )㎝的距离误差。
A、20B、30C、40D、506. 1977年我国极移协作小组确定了我国的地极原点,记作(B)。
A、JYD1958.0B、JYD1968.0C、JYD1978.0D、JYD1988.07. 在GPS测量中,观测值都是以接收机的( B )位置为准的,所以天线的相位中心应该与其几何中心保持一致。
A、几何中心B、相位中心C、点位中心D、高斯投影平面中心8.在20世纪50年代我国建立的1954年北京坐标系,采用的是克拉索夫斯基椭球元素,其长半径和扁率分别为( B)。
A、a=6378140、α=1/298.257B、a=6378245、α=1/298.3C、a=6378145、α=1/298.357D、a=6377245、α=1/298.09.GPS 系统的空间部分由21 颗工作卫星及3 颗备用卫星组成,它们均匀分布在(D)相对与赤道的倾角为55°的近似圆形轨道上,它们距地面的平均高度为20200Km,运行周期为11小时58分。
天宝GPS操作流程
天宝GPS操作流程一、蓝牙连接设置(基准站)二、基准站配置三、任务与投影参数设置四、启动基准站五、蓝牙连接设置(流动站)六、流动站配置七、启动流动站八、工地校正九、测量点十、放样十一、数据传输十二、接收机说明十三、电台说明十四、常见问题一蓝牙连接设置(基准站)启动TrimbleSurveyController(天宝GPS接收机手簿模拟软件)测量软件1、配置----控制器----蓝牙连接到GPS接收机:如果我们已经连过该接收机,就在连接到GPS接收机的下拉列表里选择。
如果下拉列表中没有该接收机的SN,那么我们点击配置,进行下一步的配置。
2配置----正在等待蓝牙配置----蓝牙配置窗口界面中:TurnonBlueTooth是打开蓝牙,必须选中此项。
Makethidevicedicovertootherdevice使别的蓝牙设备能够发现本手簿,可选项。
注:接收机的SN可以在接收机的机身上查看SN桑拿或是CDKEY之类的注册码,一般就这两种意思。
3点击下面的Device(设备)选项点击NewPartnerhip开始搜索新设备如果有Trimble的GPS接收机已经开机的情况下,我们的手簿能搜索到该设备。
选中该设备(框中),点击Ne某t----会弹出EnterPakey(输入密码)对话框,直接点击Ne某t(下一步),点击Finih。
蓝牙设备成功添加后就会在NewPartnerhip下面列出,点击OK(右上角)。
4、在(连接到GPS接收机)的列表中,选择您的接收机型号稍等片刻,就能看到手簿和接收机连通,在右侧的面板上显示接收机的当前信息,此时可以正常继续下一步工作。
二基准站配置我们只需要第一次使用该手簿的时候进行该项配置,通常在正常作业过程中不需要再进行设置。
TrimbleSurveyController测量软件1、配置----测量形式----RTK----基准站选项测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新曙光,极大地提高了外业作业效率。
GPS最全复习题答案

错误!未找到引用源。
试说明GPS全球定位系统的组成以及各个部分的作用。
1. 空间星座部分:GPS卫星星座由24颗(3颗备用)卫星组成,分布在6个轨道内,每个轨道4颗1)接收和存储由地面监控站发来的导航信息,接收并执行监控站的控制指令。
2)利用卫星上的微处理机,对部分必要的数据进行处理。
3)通过星载的原子钟提供精密的时间标准。
4)向用户发送定位信息。
5)在地面监控站的指令下,通过推进器调整卫星姿态和启用备用卫星。
2.地面监控部分:地面监控部分由分布在全球的5个地面站组成,包括5个监测站,1个主控站,3个信息注入站。
监测站:对GPS卫星进行连续观测,进行数据自动采集并监测卫星的工作状况。
主控站:协调和管理地面监控系统,主要任务:根据本站和其它监测站的观测资料,推算编制各卫星星历、卫星钟差和大气修正参数,并将数据传送到注入站;提供全球定位系统时间基准;各监测站和GPS卫星原子钟,均应与主控站原子钟同步,测出其间的钟差,将钟差信息编入导航电文,送入注入站;调整偏离轨道的卫星,使之沿预定轨道运行;启用备用卫星代替失效工作卫星。
注入站:在主控站控制下,将主控站推算和编制的卫星星历、钟差、导航电文和其它控制指令等,注入到相应卫星的存储系统,并监测注入信息的正确性。
3. 用户设备部分:由GPS接收机硬件和数据处理软件以及微处理机和终端设备组成。
GPS接收机硬件主要接收GPS卫星发射的信号,以获得必要的导航和定信息及观测量,并经简单数据处理而实现实时导航和定位。
GPS软件主要对观测数据进行精加工,以便获得精密定位结果。
试说明我国北斗导航卫星系统与GPS的区别1)使用范围不同。
“北斗一号”是区域卫星导航系统,只能用于中国及其周边地区,而GPS 是全球导航定位系统,在全球的任何一点只要卫星信号未被遮蔽或干扰,都能接收到三维坐标数据。
2)卫星的数量和轨道是不同的。
“北斗一号”有3颗,位于高度近3.6万千米的地球同步轨道。
使用GPS进行精准测量的技巧
使用GPS进行精准测量的技巧随着科技的不断发展,全球定位系统(GPS)已经成为许多行业的重要工具,尤其是在测量领域。
其高精度和方便性使得GPS在地理测量、导航和地图绘制等领域的应用越来越广泛。
本文将介绍一些使用GPS进行精准测量的技巧,帮助读者更好地利用这一工具。
首先,正确设置GPS接收机是进行精准测量的基础。
在进行测量前,应将GPS接收机放置在不受遮挡的地方,确保能够接收到尽可能多的卫星信号。
此外,要确保接收机的时间和日期设置正确,以便与卫星定位系统保持同步。
在定位过程中,接收机的天线应指向天空,避免被周围建筑物或树木阻挡。
通过正确设置和操作GPS接收机,可以最大程度地提高测量精度。
其次,选择合适的测量模式也是进行精准测量的关键。
GPS接收机通常具有不同的定位模式,如实时差分定位、实时测量和后处理等。
实时差分定位是一种在测量过程中即时校正GPS信号的方法,可以提高定位精度。
而实时测量模式则适用于那些对定位精度要求不是特别高的场合。
后处理模式则需要将测量数据下载到电脑中,通过专门的软件进行处理和校正,以获得更高的测量精度。
根据具体的测量需求和所处环境,选择合适的测量模式可以帮助我们更好地利用GPS进行精准测量。
另外,合理选取基准站也是进行精准测量的关键。
基准站是指那些已经通过多次校正和测量,具有较高精确度的GPS接收站点。
在进行测量时,选择距离目标区域较近的基准站可以减少信号传输时间,提高测量精度。
此外,选择基准站时还需要考虑周围地形、地貌以及天气等因素,避免因为环境条件的变化而影响测量结果。
通过合理选取基准站,可以提高测量的可靠性和准确性。
此外,根据实际情况进行数据处理也是进行精准测量必不可少的环节。
在进行GPS测量后,需要对所得到的数据进行处理和分析,以得到精确的测量结果。
在数据处理过程中,应该注意排除那些可能引起误差的因素,例如大气延迟、信号多路径效应以及接收机误差等。
通过采用合适的数据处理方法和算法,可以减小或消除这些误差,提高测量精度。
GPS测量原理与应用试卷与答案(共5套)

GPS原理与应用第一套一、单项选择题(每小题 1 分,共 10 分)1.计量原子时的时钟称为原子钟,国际上是以( C)为基准。
A、铷原子钟 B 、氢原子钟 C 、铯原子钟 D 、铂原子钟2.我国西起东经 72°,东至东经 135°,共跨有 5 个时区,我国采用( A )的区时作为统一的标准时间。
称作北京时间。
A、东8区 B 、西8区 C 、东6区 D 、西6区3.卫星钟采用的是 GPS 时,它是由主控站按照美国海军天文台( USNO)( D )进行调整的。
在 1980 年 1 月 6 日零时对准,不随闰秒增加。
A、世界时(UT0) B 、世界时(UT1)C、世界时(UT2) D 、协调世界时(UTC)4.在 20 世纪 50 年代我国建立的 1954 年北京坐标系是( C)坐标系。
A、地心坐标系 B 、球面坐标系C、参心坐标系 D 、天球坐标系5.GPS定位是一种被动定位,必须建立高稳定的频率标准。
因此每颗卫星上都必须安装高精确度的时钟。
当有 1×10— 9s 的时间误差时,将引起( B )㎝的距离误差。
A、20 B 、30 C 、40 D 、506. 1977 年我国极移协作小组确定了我国的地极原点,记作(B)。
A、JYD1958.0 B 、 JYD1968.0 C 、 JYD1978.0 D 、JYD1988.07. 在GPS测量中,观测值都是以接收机的( B )位置为准的,所以天线的相位中心应该与其几何中心保持一致。
A、几何中心 B 、相位中心C、点位中心 D 、高斯投影平面中心8.在 20 世纪 50 年代我国建立的 1954 年北京坐标系,采用的是克拉索夫斯基椭球元素,其长半径和扁率分别为( B )。
A、a=6378140、α =1/298.257 B 、a=6378245、α =1/298.3C、a=6378145、α =1/298.357 D 、a=6377245、α =1/298.09.GPS 系统的空间部分由21 颗工作卫星及 3 颗备用卫星组成,它们均匀分布在(D)相对与赤道的倾角为55°的近似圆形轨道上,它们距地面的平均高度为20200Km,运行周期为11 小时58 分。
概述GPS-RTK技术
概述GPS-RTK技术一、GPS-RTK技术的概述1、GPS-RTK系统组成GPS-RTK又名实时动态差分法,它采用差分GPS三类(位置差分、伪距差分和相位差分)中的相位差分,是能够在野外实时得到厘米级定位精度的测量方法。
RTK系统基准站由基准站GPS接收机及卫星接收天线、天线电数据链电台及发射天线、直流电源等组成。
(如图1)1.1基准站部分。
基准站负责接收GPS信号,包括导航信号、电文信号等。
基准站的使用目的是提供差分坐标,星历等信息。
1.2 差分传送部分。
差分传送的任务是将基准站的差分数据传输给移动站包括测站坐标、观测值、卫星跟踪状态等数据。
1.3 移动站部分。
移动站的任务是接收两种信号,其分别是GPS信号和基准站差分信号,在此基础上,解算信号,最后得到相关的实时定位结构,其具备高精准度的特点。
1.4 手簿终端控制器。
其内置测量软件为RTK测量软件,可以设置相关的工作参数,比如基准站和移动站等的参数,并且可以显示成果,这成果为移动站实时坐标,并且能进行测量参数的测量和设计辅助路线。
2、GPS-RTK的工作原理GPS-RTK是实时动态定位技术,其基础是载波相位观测值,其功能是可以实时提供三维定位结果,并且以坐标的形式呈现出来,其优点是精确度高,达到厘米基本。
在该模式中,有两个部分输送数据,分别为基准站和流动站,在数据链的基础上,基准站给流动站输送观测值和测站坐标信息。
流动站有三个职能:一是接收基准站传送的数据:二是采集GPS观测数据;三是自动组成差分观测值,对数据进行实时处理,这一工作必须在系统内为完成。
流动站可处于两种状态,分别是静态和动态。
数据处理技术和数据传输技术是非常重要的,也是RTK 技术的核心所在。
RTK测量技术使用领域广泛,其具有自动化程度高和精确度高的优点,且其克服了传统的弊端,测量的精确度不受天气的影响,并且可24小时不停的工作。
RTK定位离不开接收机,接收机分为两种,一种是基准站接收机,另一种是流动站接收机,分别需要一台或多台以上,电台也是少不了的,其作用是数据传输,RTK模式的关键是控制手簿,其功能是记录数据,包括基准站坐标、高层、坐标系转换参数、水准面拟合参数;流动站接收机安置于众多待测点上。
R8 max GPS RTK测量操作说明
R8 max GPS RTK测量操作说明一、TSC2与计算机之间的数据传输软件介绍1、数据同步软件Office Synchronizer(1)Office Synchronizer同步软件介绍简单地说Office Synchronizer就是实现计算机与TSC2数据的上传下载的一个平台,通过设置Office Synchronizer,可以实现TSC2与计算机之间的数据的自动传输。
(2)安装Office Synchronizer要安装Office Synchronizer,须先安装Microsoft的两个控件ActiveSync、NET Framework,该文件保存在TBC文件夹中。
安装完Microsoft的两个控件后,安装TBC文件夹中Office Synchronizer。
首次安装时,接通工地设备电源。
注意此时切勿(用USB电缆)连接计算机。
a、在计算机上启动Microsoft® ActiveSync®技术建立连接设置b、启动ActiveSync,在菜单上选择文件>连接设置c、选择适当的工地设备连接类型。
你可以用COM、USB或Ethernet连接进行连接。
建议的连接类型是USB。
只选择你要使用的连接类型。
d、单击确定。
e、将COM、USB或Ethernet电缆的一端插入计算机上的连接器,另一端接到工地设备上。
设备打开一个窗口,问你是否要建立桌面系统连接。
单击是。
ActiveSync现在应该显示你是已连接并注册为客人(Guest)。
f、SCS900用户须知:在将工地设备连接到计算机之前,启动并关闭SCS900软件。
此操作初始化工地设备上要存储数据的文件夹。
同时,此操作使Office Synchronizer可以识别工地设备上的数据文件夹。
g、设置同步器同步模式和显示设置:启动Office Synchronizer,在菜单上选择工具>同步器选项。
在同步器选项选项卡下确定同步模式是否设置为人工,冲突解决是否设置为保留项目不解决。
RTK的简介及应用
2.1.2 RTK 测量时安装
1、将接收机固定在背包之内,连接用电台天线电缆及连接座连 接标准电台天线 和接收机的电台端口(TNC 头端) 2、将 GPS 天线用 GPS 天线电缆和接收机的 GPS 天线端口相 连。将 GPS 天线固定 在对中杆上。 3、用手簿电缆将测量控制器和接收机的 Port 1 端口相连(也可 以连接 Port 2 或 Port 3 端口)。 4、将测量控制器用手簿托架固定在对中杆上。
2.1.6 PDL 电台使用注意事项
1. 电台用于发射时,可利用功放开关选择是否启用功率放大器,启用时 (将 开关切换至 High),信号发射功率为 35W;不启用时(将开关切换至 Low), 信号发射功率为 2W。 2. 启用功放时,必须配置相应容量的电源(如车用蓄电池)或直流电源。 严禁利用小容量电池支持功放工作,另外,电台支持的工作电压为 9---16V。 3. 使用时,务必先接好相应的连线,再连接电源,打开开关。 4. 使用时,应将电台置于通风状况较好处利于散热(最好悬挂,尤其在 夏 季)。电台为完全防水设计,适用于恶劣的野外工作环境。 5. 储藏时,应置于通风干燥处,以免受潮。 6. 请勿拆卸鞭状发射天线的增益线圈以防破坏其密封措施。
4 外业观测 各 GPS 观测小组在得到作业指挥员所下达的作 业指令后,应严格按照作业指令的要求进行外业 观测。在进行外业观测时,外业观测人员除了严 格按照作业规范、作业指令进行操作外,还要根 据情况,灵活地采取应对措施。在外业常见的情 况有不能按时开机、仪器故障和电源故障等。 5 数据传输与转储 在一天外业观测结束后,应及时地将观测数据传 输到计算机中,并根据要求进行备份,在数据传 输时需要对照外业观测记录手簿,检查所输入的 记录是否正确。数据传输与转储应根据条件,及 时进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一部分 RTK测量的基本原理 1. 概述 2. 系统组成
第二部分 仪器硬件介绍 1. Trimble 5700 GPS接收机 2. Trimble 5800 GPS接收机 3. Trimble Tsc2测量控制器 4. Trimble 基准站无线电电台
第三部分 测量软件介绍 第四部分 Trimble RTK测量系统一般操作流程 第五部分 RTK测量数据处理
• 硬重置=按住电源键+CTRL键8—10 秒 ----清楚RAM
(建议使用软重置)
4.基准站无线电电台
电台前面板
• ON/OFF---电源按键 (电压低于10V闪烁) • Channel---改变频点按键 • TX 指示灯---电台工作指示灯 • RX指示灯---干扰信号指示灯 • AMP指示灯---高频工作状态指示灯
第四部分 RTK一般操作流程
• 建立新任务 ----输入任务名称 ----选择坐标系统
• 输入已知点坐标 • 架设仪器 • 启动基准站 • 启动移动站 • 点校正/测量碎步点/放样
建立新任务
选择坐标系
键入参数法
一
二
三
四
五
六
七
键入已知点坐标
一
二
三
四
架设仪器
1. 基准站(5700) • GPS接收天线-----GPS接收机 • GPS接收机-----电台 • 电台-----无线电发射天线 • 电台电源线 (注:5800基准站与5700相似)
屏幕
• 3.8 ″ 320*240(QVGA)横向显示器 • 全彩色,触摸屏 • 为黑暗环境设计的背景光显示 • 适应明亮的外业环境 • 报警灯 • 屏幕锁定(按住电源键5秒钟)
----擦拭屏幕 ----激活键盘
键盘
•完全的数字字母键盘 •蜘蛛形方向键 •ENTER 和TAB按键 •Trimble 功能键 •Microsoft功能键 •重新启动/电源键 •麦克风/扬声器
智能电源模块
• 6600mAh锂电池 • 30个小时连续使用 • 智能充电:前两小时快速充电80% • 充电状态指示:
---绿灯快速闪动=快速充电过程 ---绿灯慢闪=细流慢充 ---稳定绿灯=完全充满 (充电温度:0—45摄氏度)
TSC2测量控制器的软/硬重置
• 软重置=按住电源键5秒钟 ----不会清除RAM
2. 流动站(5700) • GPS接收天线-----GPS接收机 • GPS接收机电台信号接收天线 • GPS接收机-----测量控制器(测量手薄)
(5800流动站如下图所示)
仪器架设图示
谢谢!
电台后面板
• Antenna = 电台电缆连接线及发射天线 • Data/Power = GPS数据传输/供电端口 •High/Low =高/低功率选择
第三部分 测量软件介绍
Trimble Survey Controler V11.21
文件菜单
键入菜单
配置菜单
测量菜单
坐标几何菜单
仪器菜单
• 基准站 (1) 基准站GPS接收机 能够接收、通过串口发射 基准站观测的伪距和载波相位观测值。 (2) 基准站电台 将基准站观测的伪距和载波相 位观测值发射出去。
• 流动站 (1) 流动站无线电系统 能够接收基准站观测的 伪距和载波相位观测值、基准站坐标。 (2) 流动站GPS接收机 A.能够观测伪距和载波相 位观测值 B.通过串口接收基准站的坐标、伪距、 载波相位观测值 C.并能够差分处理基准站和流动 站的载波相位观测值。 (3) 测量控制器
(2) 在流动站通过无线电接收基准站发射 的信息,将载波相位观测值实时进行差分 处理,得到基准站和流动站坐标△X,△Y, △Z;坐标差加上基准站坐标得到流动站每 个点WGS84坐标,通过坐标转换参数转换得 出流动站每个点的平面坐标x,y和海拔高 h。这个过程称作GPS RTK定位过程。
2. 系统组成
第二部分 Trimble GPS硬件介绍
1.Trimble 5700GPS接收机
7
2. Trimble 5800 GPS 接收机介绍
8
3. TSC2测量控制器
您将了解Trimble TSC2控制器特 点:
• 可支持的数据采集软件 • TSC2控制器硬件
-----控制器帽 -----无线设备 • TSC2控制器OS -----基于Microsoft windows mobile 的 pocket PC • 超常坚固而且智能 -----显示器,键盘,电源,通讯,硬件规格
第一部分 RTK测量的基本原 理
1. 概述 Realtime Kinematic实时载波相位差分观 测值动态定位。
定位原理:
(1) 在测区中部选择一个已知坐标的 控制点作为基准站,安置一台GPS接收 机,连续跟踪所有可见卫星;并实时 地将测量的载波相位观测值、伪距观 测值、基准站坐标等用无线电传送出 去。