系统工程仿真实例
ansys耦合仿真成功案例

ansys耦合仿真成功案例1. 汽车冷却系统的耦合仿真在该案例中,使用ansys耦合仿真对汽车冷却系统进行了模拟。
通过对发动机、散热器、水泵等部件进行耦合仿真,分析了冷却系统内部的流体动力学、温度分布、压力变化等参数,从而为汽车冷却系统的优化设计提供了理论依据。
2. 管道输油系统的耦合仿真该案例中,使用ansys耦合仿真对管道输油系统进行了模拟。
通过对输油管道、泵站、储罐等部件进行耦合仿真,分析了油品在管道中的流动状态、压力变化等参数,为管道输油系统的安全运行提供了重要的参考。
3. 风力发电机组的耦合仿真在该案例中,使用ansys耦合仿真对风力发电机组进行了模拟。
通过对风机、发电机、齿轮箱等部件进行耦合仿真,分析了风电场内部的风速、转速、功率等参数,为风力发电机组的设计和优化提供了重要的参考。
4. 节能建筑的耦合仿真在该案例中,使用ansys耦合仿真对节能建筑进行了模拟。
通过对建筑外墙、屋顶、窗户等部件进行耦合仿真,分析了建筑内部的温度、湿度、气流等参数,为节能建筑的设计和施工提供了理论支持。
5. 工业炉灶的耦合仿真在该案例中,使用ansys耦合仿真对工业炉灶进行了模拟。
通过对燃烧室、烟道、喷嘴等部件进行耦合仿真,分析了燃烧过程中的温度、压力、流量等参数,为工业炉灶的设计和运行提供了理论依据。
6. 高速列车的耦合仿真在该案例中,使用ansys耦合仿真对高速列车进行了模拟。
通过对车体、轮轴、轮胎等部件进行耦合仿真,分析了列车在高速行驶中的动力学特性、空气动力学特性等参数,为高速列车的设计和运行提供了理论支持。
7. 消防水系统的耦合仿真在该案例中,使用ansys耦合仿真对消防水系统进行了模拟。
通过对水泵、管道、喷头等部件进行耦合仿真,分析了消防水系统内部的水流速度、压力变化等参数,为消防水系统的设计和施工提供了理论支持。
8. 电力传输线路的耦合仿真在该案例中,使用ansys耦合仿真对电力传输线路进行了模拟。
系统工程仿真实验报告

系统工程仿真实验报告姓名:_蒋智颖_ 学号:_110061047_ 成绩:___________实验一:基于VENSIM的系统动力学仿真一、实验目的VENSIM是一个建模工具,可以建立动态系统的概念化的,文档化的仿真、分析和优化模型。
PLE(个人学习版)是VENSIM的缩减版,主要用来简单化学习动态系统,提供了一种简单富有弹性的方法从常规的循环或储存过程和流程图建立模型。
本实验就是运用VENSIM进行系统动力学仿真,进一步加深对系统动力学仿真的理解。
二、实验软件VENSIM PLE三、原理1、在VENSIM中建立系统动力学流图;2、写出相应的DYNAMO方程;3、仿真出系统中水准变量随时间的响应趋势;四、实验内容及要求某城市国营和集体服务网点的规模可用SD来研究。
现给出描述该问题的DYNAMO方程及其变量说明。
L S·K=S·J+DT*NS·JKN S=90R NS·KL=SD·K*P·K/(LENGTH-TIME·K)A SD·K=SE-SP·KC SE=2A SP·K=SR·K/P·KA SR·K=SX+S·KC SX=60L P·K=P·J+DT*NP·JKN P=100R NP·KL=I*P·KC I=0.02其中:LENGTH为仿真终止时间、TIME为当前仿真时刻,均为仿真控制变量;S为个体服务网点数(个)、NS为年新增个体服务网点数(个/年)、SD为实际千人均服务网点与期望差(个/千人)、SE为期望的千人均网点数、SP为的千人均网点数(个/千人)、SX为非个体服务网点数(个)、SR为该城市实际拥有的服务网点数(个)、P为城市人口数(千人)、NP为年新增人口数(千人/年)、I为人口的年自然增长率。
要求:在VENSIM中建立相应的系统动力学流图和DYNAMO方程,进行仿真。
(完整版)PROTEUS仿真100实例
《单片机C语言程序设计实训100例—基于8051+Proteus仿真》案例第01 篇基础程序设计01 闪烁的LED/* 名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit LED=P1^0;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02 从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}03 8只LED左右来回点亮/* 名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){for(i=0;i<7;i++){P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04 花样流水灯/* 名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05 LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
4机11节点系统的实例仿真
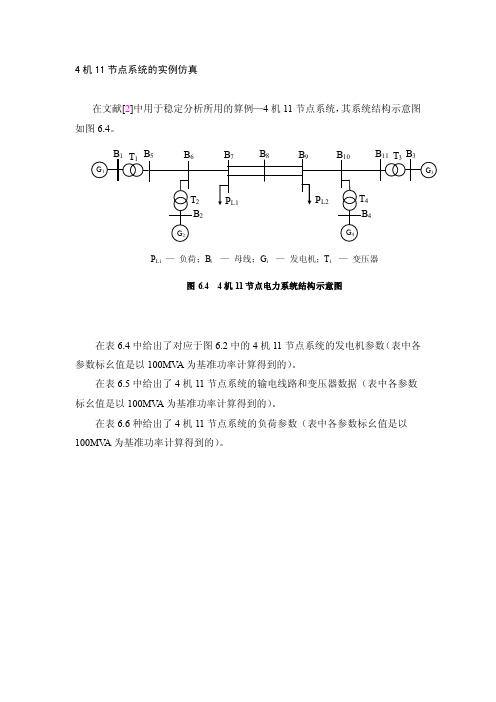
4机11节点系统的实例仿真在文献[2]中用于稳定分析所用的算例—4机11节点系统,其系统结构示意图如图6.4。
P Li—负荷;B i —母线;G i—发电机;T i—变压器图6.4 4机11节点电力系统结构示意图在表6.4中给出了对应于图6.2中的4机11节点系统的发电机参数(表中各参数标幺值是以100MV A为基准功率计算得到的)。
在表6.5中给出了4机11节点系统的输电线路和变压器数据(表中各参数标幺值是以100MV A为基准功率计算得到的)。
在表6.6种给出了4机11节点系统的负荷参数(表中各参数标幺值是以100MV A为基准功率计算得到的)。
表6.4 4机11节点系统发电机数据发电机No.1 No.2 No.3 No.4 母线号B1B2B3B4额定功率900.0 900.0 900.0 900.0 额定电压20.0 20.0 20.0 20.0x 1.8 1.8 1.8 1.8 d'x0.3 0.3 0.3 0.3 d''x0.25 0.25 0.25 0.25 dx 1.7 1.7 1.7 1.7 q'x0.55 0.55 0.55 0.55 q''x0.25 0.25 0.25 0.25 qx0.2 0.2 0.2 0.2 lR0.0025 0.0025 0.0025 0.0025 a'T8.0s 8.0s 8.0s 8.0s 0d'T0.4s 0.4s 0.4s 0.4s 0q''T0.03s 0.03s 0.03s 0.03s d''T0.05s 0.05s 0.05s 0.05s 0q惯量H 6.5 6.5 6.175 6.175A0.015 0.015 0.015 0.015 SatB9.6 9.6 9.6 9.6 Sat0.9 0.9 0.9 0.91T表6.5 4机11节点系统的输电线路和变压器数据母线号类型R X B/2 B1– B5变压器0 0.0167 0B2– B6变压器0 0.0167 0B5– B6输电线路0.0025 0.025 0.0437 B6– B7输电线路0.001 0.01 0.0175 B7– B8输电线路0.011 0.11 0.1925 B7– B8输电线路0.011 0.11 0.1925 B8– B9输电线路0.011 0.11 0.1925 B8– B9输电线路0.011 0.11 0.1925 B9– B10输电线路0.001 0.01 0.0175 B4– B10变压器0 0.0167 0B10– B11输电线路0.0025 0.025 0.0437 B3– B11变压器0 0.01670表6.6 4机11节点系统的负荷参数负荷号母线号有功功率无功功率P L1B5976.0 100.0P L2B61767.0 100.0。
matlab连续时间系统的建模与仿真实例
matlab连续时间系统的建模与仿真实例标题:深入探讨matlab连续时间系统的建模与仿真实例一、引言在工程领域中,连续时间系统的建模与仿真是非常重要的一环。
使用matlab作为工具可以帮助工程师们更好地理解和分析连续时间系统的行为。
本文将深入探讨matlab在连续时间系统建模与仿真中的实际应用,帮助读者更好地掌握这一领域的知识。
二、连续时间系统建模与仿真概述连续时间系统建模与仿真是指利用数学方法和计算机工具对连续时间系统进行抽象化描述和模拟。
在工程实践中,这一过程可以帮助工程师们更好地理解系统的动态特性、分析系统的稳定性和性能,并设计控制策略以满足特定的需求。
1.连续时间系统建模方法连续时间系统建模的方法有很多种,常用的包括微分方程描述、传递函数描述、状态空间描述等。
在matlab中,可以利用Simulink工具箱来快速构建系统的模型,并进行仿真分析。
2.连续时间系统仿真实例下面我们将以一个简单的例子来展示如何使用matlab对连续时间系统进行建模和仿真。
假设有一个带有阻尼的弹簧质量系统,其运动方程可以描述为:\[ m \frac{d^2 x(t)}{dt^2} + c \frac{dx(t)}{dt} + kx(t) = F(t) \]其中,m为质量,c为阻尼系数,k为弹簧常数,F(t)为外部作用力。
我们希望利用matlab对这个系统进行建模,并仿真系统的动态响应。
三、matlab建模与仿真实例1.建立模型在matlab中打开Simulink工具箱,我们可以直接从库中选择弹簧质量阻尼系统的模块进行快速搭建。
将质量、阻尼、弹簧和外部作用力连接起来,即可构建出系统的模型。
2.参数设定设定系统的参数:m=1kg, c=0.5N/m/s, k=2N/m, 外部作用力F(t)=sin(t)。
3.仿真分析设置仿真时间为10s,运行仿真,观察系统的位移-时间和速度-时间响应。
四、实验结果分析通过matlab进行仿真,我们可以得到系统的位移和速度随时间的变化曲线。
几种仿真实例浅析
系统仿真李国立122080201028几种仿真实例浅析摘要:仿真软件是一种专门用于仿真的计算机软件,它的发展与仿真应用、算法、计算机和建模等技术的发展相辅相成。
仿真软件的应用对于复杂工程问题的解决起了很大的作用。
本文通过几个仿真实例的简单介绍来说明不同仿真软件在各不同领域的应用。
1基于ADAMS的挖掘机液压系统仿真技术1.1软件介绍ADAMS(automatic dynamic analysis of mechanical system)即机械系统动力学自动分析。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
A DAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
1.2实例简介1.2.1液压系统建模挖掘机液压系统每个执行元件都是由相应的液压油路驱动,并通过对液压系统进行控制实现各种动作。
其基本液压原理图如下所示。
图1 基本液压原理图在图1中有6个液压元件(X1,X2,X3,Y1,Y2,Y3),组成3个液压容腔(V1,V2,V3)。
液压回路的动态模型可以由3个封闭容腔的压力和流量方程表示。
分别列出各个封闭容腔的压力和流量方程。
对应数学模型,在ADAMS/SOLVER[2]中定义相应的状态变量,建立状态方程组构成ADAMS中的液压系统仿真模型,并采用适合求解刚性系统的GSTIFF积分算法,可以减少液压系统仿真中遇到的病态问题。
1.2.2机械系统模型与液压系统模型参数关联DAMS提供了动力学方程和运动学方程的自动数值求解方法,能对多刚体系统进行动力学和运动学分析。
在ADAMS中建立挖掘机的机构模型,计算出不同姿态和挖掘负载下等效到液压缸活塞上的质量、负载、位移和速度等,将这些参数作为液压系统m、FL、x1、x。
系统工程第四章系统仿真
第四章 系统仿真4.1 基本概念系统仿真也叫系统模拟,就是通过建立和运行系统的计算机仿真模型,来模仿实际系统的运行状态及其随时间变化的规律,以实现在计算机上对实际系统的结构和行为进行动态实验的全过程。
通过对仿真过程运行过程的观察和统计,得到实际系统的仿真输出参数和基本特性,可以此来估计和推断实际系统的真实参数和真实性能,以便掌握实际系统运动变化的规律,找到最优的或满意的解决实际问题的办法。
特别是比较复杂的系统很难建立数学表达式时, 往往可以通过计算机仿真技术来进行研究。
例如, 在图4-1中,已知采区来煤量q 1是一个随机变量, 根据统计结果,它服从正态分布,已知其均值 μ=1.45t / min ,其标准差σ=0.095t /min 。
大巷 是胶带输送机,其运输量是常数:q 2=1.33t /min 。
求8h 后,采区最大煤仓容量。
象这种问题,就 可通过计算机仿真方法来寻求解答。
下面再举一例进一步说明计算机仿真的基本概念。
早在18世纪就有人作了随机模拟实验,投掷硬币4040次,出现正面2043次,从而求得出现正面的频率为P=2043/4040=0.5080。
后来有人投了24000次,出现正面教育2012次,求得出现正面的频率为0.5005,更接近0.5。
上述投掷硬币实验是人工作的,很费时间和精力,实际上完全可由计算机来进行,这就要建立一个计算机能够运算的模拟模型。
建立这个模型的关键是用随机数去模拟投掷硬币的实验。
所谓随机数就是一组随机出现的数列,通常 用的是[0,1]区间的随机数。
这时要求[0,1]区 间的随机数必须具备下列性质:一是它的均匀性, 即这些随机数落在[0,1]区间内任一位置的概率 是相同的;另一个是它的随机性,即这些数在 [0,1]区间内任一位置出现与否是随机的、独立 的。
如以R 表示随机数,则出现0≤R ≤0.5和 0.5≤R ≤1的概率相等,都为0.5,这样就可以 模拟硬币出现的情况。
工程仿真技术的应用实例
pl
(5-2) ——失效应变。
10
5.1.4 网格划分与求解的设定
网格划分时,为提高计算精度,需要将局部网格细划分,而其余部分 的网格粗分。这样可以减少单元数量,减少计算时间,提高精度。在非线 性有限元分析中,通过迭代法求解非线性方程组以获得数值解。NewtonRaphson法收敛速度快,但有时可能不收敛。当Newton-Raphson法失败 时,系统会自动调用Sparse法求解。Direct iteration方法计算量大,但通 常迭代收敛,因此选用Directiteration法,如图5-8所示。
0127
钻削深度 (mm)
8
用于钻削仿真的两刀片均为 WC 硬质合金,刀片材料的基本物理属性 如表5-2所示;工件材料选用 45 钢,其基本物理属性如表5-3所示。
表5-2 WC 硬质合金刀片的物理属性
杨氏模 (GPa)
泊松比
热膨胀系 (10-6/℃)
导热系数 (W/m/℃)
热容(N/mm2/℃)
650
图5-11 工件的网格划分
图5-12 麻花钻的网格划分 15
(5)选定材料 在对象树中,分别选择工件和浅孔钻,进入 general 界面。从材料库
material librarey 中分别选择工件和刀具的材料为 AISI-1045、WC 然后 单击 Load 按钮,材料将显示在对象树中。
(6)设置边界条件 选择对象树中的工件,在 Boundary Conditions 界面中选择 Velocity。
图5-1 平面桁架系统Deform-3D 自带的参数建立图
5
由于本文用到的麻花钻半径为 3mm,故修改图框中的半径等其 他参数,修改完成后,点击 Create 生成麻花钻几何模型,并选择圆 柱毛坯为加工工件,最后麻花钻及被加工工件几何模型如图5-2所示:
《系统工程》系统仿真实验报告
《系统工程》系统仿真实验报告实验日期:2018年4月30日——2018年5月1日班级2016级4班姓名学号实验系统仿真名称实验目的:通过实验加深对系统动力学建模和仿真的理解,熟练掌握vensim仿真软件的使用,并能对具体问题进行建模、仿真,且能对软件处理结果进行分析。
实验所用软件及版本:Vensim5.0实验过程:(含基本步骤及异常情况记录等)对教材《系统工程》P112第11题进行仿真分析。
要求先根据题意画出因果关系图及流图,然后仿真得到仿真结果,最后做单因素灵敏度分析。
1.根据教材《系统工程》P112第11题给出的DYNAMO方程如下L S.K=S.J=DT*NS.JKN S=90R NS.KL=SD.K*P.K/(LENGTH-TIME.K)A SD.K=SE-SP.KC SE=2A SP.K=SR.K/P.KA SR.K=SX+S.KC SX=60L P.K=P.J+DT*NP.JKN P=100R NP.KL=I*P.KC I=0.02其中:LENGTH为仿真终止时间、TIME为当前仿真时刻,均为仿真控制变量;S为个体服务网点数(个)、NS为年新增个体服务网点数(个/年)、SD为实际千人均服务网点与期望差(个/千人)、SE为期望的千人均网点数、SP为的千人均网点数(个/千人)、SX为非个体服务网点数(个)、SR为该城市实际拥有的服务网点数(个)、P为城市人口数(千人)、NP为年新增人口数(千人/年)、I为人口的年自然增长率。
2.根据题意画出因果关系图3.根据因果关系图运用vensim仿真软件画出相应的SD流(程)图,如下4.输出仿真示意图5.去掉影子变量(LENGTH和TIME)的仿真数据以及仿真示意图6.灵敏度分析结果下面是将人口的年自然增长率(I)由原来的0.02变为-0.25的灵敏度分析结果实验结果报告与实验总结:实验结果:本模型中存在两个速率变量,分别是年新增人口数(NP)和年新增个体服务网点数(NS),两个水准变量,分别是城市人口数(P)和个体服务网点数(S)。
系统级仿真 示例-概述说明以及解释
系统级仿真示例-概述说明以及解释1.引言1.1 概述系统级仿真是一种通过模拟和仿真整个系统的方法,旨在准确地预测系统的行为和性能。
系统级仿真可以模拟包括软件、硬件和其他系统组件在内的各种系统,包括电子设备、通信网络和航天器等。
它通过建立模型,使用数学和物理原理,模拟系统中各个组件的交互和行为,从而可以评估系统在不同条件下的性能,优化设计方案,并提前发现潜在问题。
系统级仿真在现代科学和工程领域具有广泛的应用。
在电子设备领域,它可以用于评估电路的信号传输、功耗和热管理等性能,优化电路设计。
在通信网络领域,它可以用于评估网络的吞吐量、时延和容错性能,优化网络拓扑和协议设计。
在航天器设计领域,它可以用于评估航天器的轨道和稳定性,指导设计和操作策略的制定。
系统级仿真的优势在于可以提供全面的系统性能评估,减少实际测试的成本和时间。
它可以模拟不同组件的复杂交互,捕捉系统的细节和动态行为。
同时,系统级仿真还可以提供设计优化的方案,帮助工程师和科学家在设计阶段识别和解决问题,提高产品质量和性能。
然而,系统级仿真也面临着一些挑战。
首先,构建系统模型需要对系统的结构和行为有深入的理解,需要耗费大量的时间和资源。
其次,系统级仿真需要涉及多个层面的模型,包括物理、逻辑和控制层面,需要统一各个模型之间的交互和数据传输。
此外,系统级仿真需要合理选择仿真的精度和规模,以保证结果的准确性和可信度。
总之,系统级仿真在科学和工程领域具有重要的作用。
它可以帮助我们深入理解系统的行为和性能,并为优化设计和决策提供有力的支持。
随着科学技术的不断进步,系统级仿真在未来的发展中将继续发挥重要的作用,并为解决复杂问题和推动科学进步做出贡献。
文章结构部分是对整篇文章的框架进行介绍,让读者了解到接下来的内容有哪些主要部分。
以下是文章结构部分的内容示例:1.2 文章结构本文按照如下结构进行展开:1. 引言:首先介绍系统级仿真的概念、背景和意义,以及本文的目的和主要内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(04)
INITIAL TIME = 0 Units: Year The initial time for the simulation.
S= INTEG ( SR, 10000) Units: 人
(05)
(10)
点击软件的
键进仿真。以下是仿真结果:
Time (Year) 0 1 2 3 4 5 Current
建立流图
(2)DYNAMO方程
水准方程 :L T.K=T.J+TR.JK*DT 赋初值方程:N T=1500 速率方程 :R TR.KL=S.K*C1 常量方程 :C C1=0.05 L S.K=S.J+SR.JK*DT N S=10000 DT :时间步长 J :过去 R SR.KL=T.K*C2 K :现在 C C2=1 L :将来
Vensim_PLE软件应用
教师人数T和学生人数S是按一定比例 增长的,已知某高校现有本科生10000名, 且每年以SR的幅度增加,每一名教师可引 起本科生人数增加的速率是1人/年。学校 现有教师1500名,每个本科生可引起教师 人数增加的速率TR是0.05人/年。请用SD模 型该校未来几年的发展规模,要求: (1)画出因果关系图和流图。 (2)写出相应的DYNAMO方程。 (3)列表对该校未来3~5的在校本科生和 教师人数进行仿真计算。
"S" Runs: S 10000 11500 13500 16075 19325 23378.8
Time (Year) 0 1 2 3 4 5 Current
"T" Runs: T 1500 2000 2575 3250 4053.75 5020
最后我们可以点击
进行相关常量变化的仿真:
然后我们可以通过改变使C1=0.75和C2=1.2,进而观察到 相应S,T的变化情况:
(3)建立流图完毕后点击vesim_PLE软件的
然后先将TR和SR的值输入,接着输入其他变 量的值和单位,以下是模型的各量及模型设 置情况: (06) SAVEPER =
(01) C1=
0.05 Units: **undefined**
(02) C2= 1 Units: **undefined** (03) FINAL TIME = 5 Units: Year The final time for the simulation.
T
8,000 40,000
S
6,000
30,000
4,000
000
2,000
10,000
0 0 T : Current 1 2 Time (Year) 3 4 5
0 0 1 2 Time (Year) 人 S : Current 人 3 4 5
TIME STEP Units: Year [0,?] The frequency with which output
is stored. (07) SR= C2*T Units: **undefined** (08) T= INTEG ( TR,
1500)
Units: 人 (09) TIME STEP = 1 Units: Year [0,?] The time step for the simulation. TR= C1*S Units: **undefined**