机电传动控制课后习题答案1..
机电传动控制课后习题答案
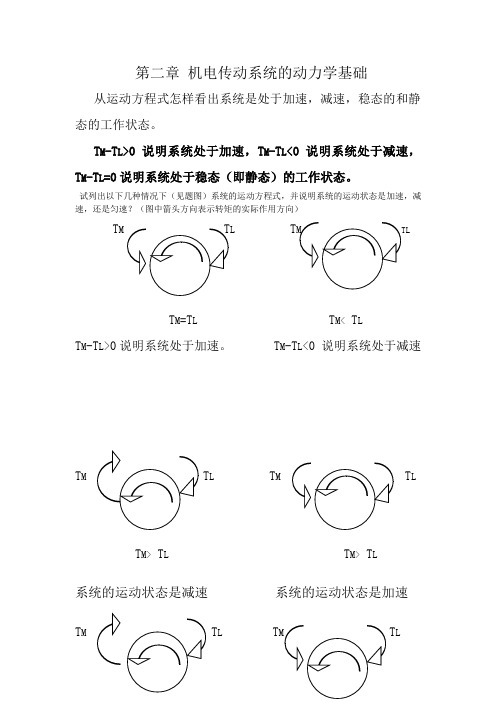
第二章机电传动系统的动力学基础从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
T M-T L>0说明系统处于加速,T M-T L<0 说明系统处于减速,T M-T L=0说明系统处于稳态(即静态)的工作状态。
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)T M TT M=T L T M< T LT M-T L>0说明系统处于加速。
T M-T L<0 说明系统处于减速T M T L T M T LT M> T L T M> T L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载.在题图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?交点是系统的稳定平衡点. 交点是系统的平衡点交点是系统的平衡交点不是系统的平衡点第三章为什么直流电记得转子要用表面有绝缘层的硅钢片叠压而成?直流电机的转子要用表面有绝缘层的硅钢片叠加而成是因为要防止电涡流对电能的损耗..一台直流发电机,其部分铭牌数据如下:PN =180kW, UN=230V,nN=1450r/min,ηN=%,试求:①该发电机的额定电流;②电流保持为额定值而电压下降为100V时,原动机的输出功率(设此时η=ηN)PN =UNIN180KW=230*ININ=782.6A该发电机的额定电流为782.6AP= IN 100/ηNP=已知某他励直流电动机的铭牌数据如下:PN =, UN=220V, nN=1500r/min, ηN=%,试求该电机的额定电流和转矩。
机电传动控制(第五版)课后习题答案
机电传动控制(第五版)课后习题答案习题与思考题第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
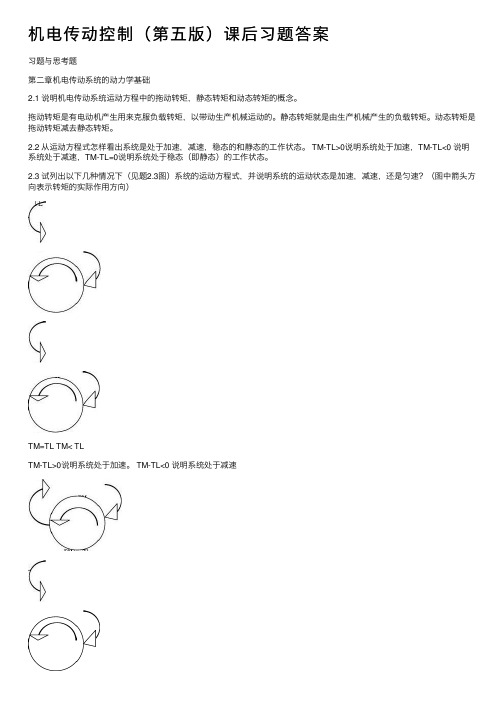
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的⼯作状态。
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)TM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速系统的运动状态是减速系统的运动状态是加速系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为P= Tω,P不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的GD2逼⾼速轴的GD2⼤得多?因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越⼩GD2越⼤,转速越⼤GD2越⼩。
2.7 如图2.3(a)所⽰,电动机轴上的转动惯量J M=2.5kgm2,转速n M=900r/min;中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
机电传动控制冯清秀版课后习题答案(一)

机电传动控制冯清秀版课后习题答案(一)随着机电一体化技术的发展,机电传动控制已经成为机械制造行业中的重要一环。
冯清秀编写的“机电传动控制”教材,是国内机电传动领域的研究者、工程师、教师以及学生的重要参考书。
作为该教材的补充材料,冯清秀版的课后习题更是针对每个章节的重点内容,提供了丰富的题目和答案,旨在帮助学生和工程师更好的理解该领域的基本原理和技术应用。
以下是冯清秀版的课后习题答案:第一章:机电传动技术的基础1.1机电传动曾历史1.1.1“机械文化”是形成机电传动文化的主要因素。
1.1.2 机电传动的发展历史可以追溯到早期的木材和皮革制品时代。
1.2机电传动技术的基本特点1.2.1 传动技术分类1.2.2 传动比,机械效率,扭矩传递范围,稳定性1.3机电传动技术与现代工业的发展关系1.3.1 它在现代工业中发挥了核心作用。
1.3.2 机电传动技术是高效、节能的核心技术之一第二章:机电传动基础知识2.1传动介质与其特性2.1.1 机械传动2.1.2 油压传动2.1.3 气压传动2.2机械传动基本概念2.2.1 【答案略】2.3传动装置的选用原则2.3.1 【答案略】第三章:机电传动元件3.1传动带3.1.1 【答案略】3.2传动链3.2.1 【答案略】3.3齿轮传动3.3.1 【答案略】第四章:机电传动系统4.1齿轮传动的设计方法4.1.1 【答案略】4.2液压传动系统的设计方法4.2.1 【答案略】4.3气压传动系统的设计方法4.3.1 【答案略】第五章:机电传动控制5.1机电传动控制系统的概述5.1.1 【答案略】5.2电子传动控制系统5.2.1 【答案略】5.3伺服传动控制系统5.3.1 【答案略】总之,冯清秀版的课后习题答案,详细地阐述了机电传动控制技术的基本概念和原理,系统阐述了传动介质、机械传动、传动装置的选用原则、齿轮传动、液压传动、气压传动、机电传动控制系统的概述、电子传动控制系统和伺服传动控制系统等知识点,对于机电传动领域的研究者、工程师、教师以及学生来说,是一本难得的宝库。
机电传动控制_各章课后习题及答案大全
机电传动控制_各章课后习题及答案⼤全机电传动控制邓星钟第四版课后答案第⼆章机电传动系统的动⼒学基础2.1 说明机电传动系统运动⽅程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产⽣⽤来克服负载转矩,以带动⽣产机械运动的。
静态转矩就是由⽣产机械产⽣的负载转矩。
动态转矩是拖动转矩减去静态转矩。
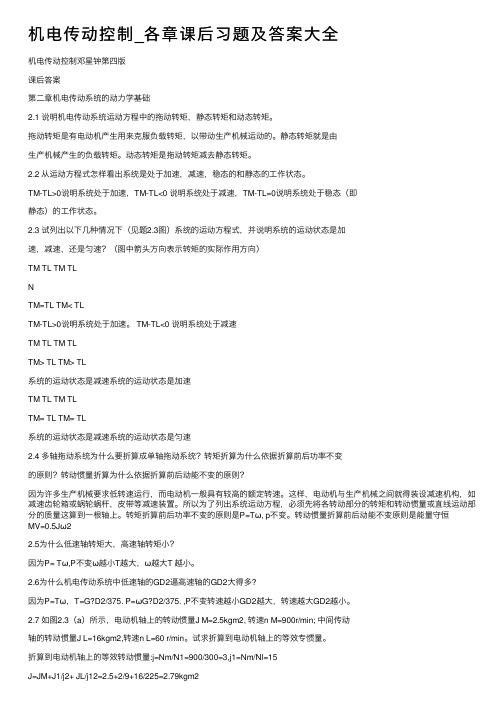
2.2 从运动⽅程式怎样看出系统是处于加速,减速,稳态的和静态的⼯作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的⼯作状态。
2.3 试列出以下⼏种情况下(见题2.3图)系统的运动⽅程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头⽅向表⽰转矩的实际作⽤⽅向)TM TL TM TLNTM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM TL TM TLTM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多⽣产机械要求低转速运⾏,⽽电动机⼀般具有较⾼的额定转速。
这样,电动机与⽣产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,⽪带等减速装置。
所以为了列出系统运动⽅程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到⼀根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩⼤,⾼速轴转矩⼩?因为P= Tω,P不变ω越⼩T越⼤,ω越⼤T 越⼩。
2.6为什么机电传动系统中低速轴的GD2逼⾼速轴的GD2⼤得多?因为P=Tω,T=G?D2/375. P=ωG?D2/375. ,P不变转速越⼩GD2越⼤,转速越⼤GD2越⼩。
机电传动控制课后习题答案
习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
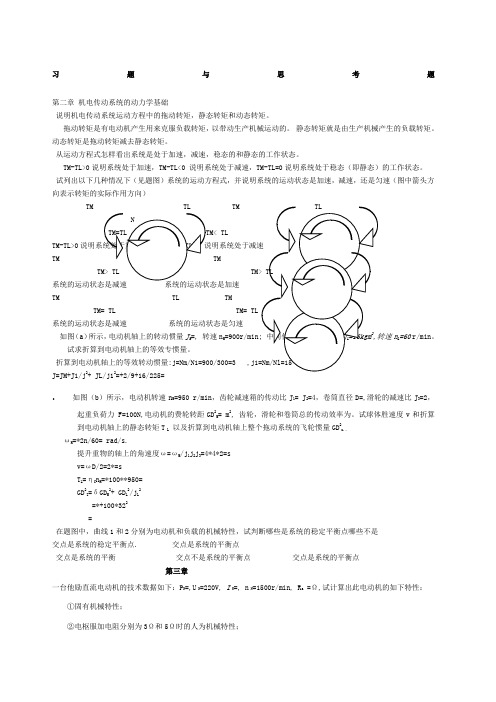
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速(图中箭头方向表示转矩的实际作用方向)TM-TL>0系统的运动状态是减速系统的运动状态是匀速如图(a)所示,电动机轴上的转动惯量J M=, 转速n M n L=60r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量J=JM+J1/j2+ JL/j12=+2/9+16/225=.如图(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=,滑轮的减速比J3=2,起重负荷力 F=100N,电动机的费轮转距GD2M= m2, 齿轮,滑轮和卷筒总的传动效率为。
试球体胜速度v和折算到电动机轴上的静态转矩T L以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。
ωM=*2n/60= rad/s.提升重物的轴上的角速度ω=ωM/j1j2j3=4*4*2=sv=ωD/2=2*=sT L=ηC n M=*100**950=GD2Z=δGD M2+ GD L2/j L2=*+100*322=在题图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点哪些不是交点是系统的稳定平衡点. 交点是系统的平衡点交点是系统的平衡交点不是系统的平衡点交点是系统的平衡点第三章一台他励直流电动机的技术数据如下:P N=,U N=220V, I N=, n N=1500r/min, R a =Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢服加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为U N/2时的人为机械特性;④磁通φ=φN时的人为机械特性;并绘出上述特性的图形。
机电传动控制习题解答

n=f(TM)
n’ n n=f(TL)
0
C
T’MT’L T
分析:
假设干扰使得转速上升到n1’ n 1 n’1 2 由图示可看出: 且 T’M < T’L T’M < T’L
当干扰使得转速下降到n1’’ n1 n1’’ 0 T’M C TL
a
由 T
a是稳定平衡点
P40 3.3
一台他励直流电动机所拖动的负载转矩 TL =常数,当电枢电压或电枢附加电阻 改变时,能否改变其稳定运行状态下电 枢电流的大小?为什么?这时拖动系统 中哪些量必然要发生变化?
1.05 365
100 0.3732 950
2
1.05
3.7
解:
E U I a Ra E1 U1 I N Ra 150 65.3 0.25 166.325 V E2 U 2 I N Ra 220 65.3 0.25 236.325 V
nM 900 jL 15 nL 60
2 16 J Z 2.5 2 2 2.793kg m2 3 15
2.8
解:由
M j1 j2 16 L
1 2 L M M nM 16 60 1 1 2 1 2 L M nM 950 6.22rad / s 16 16 60 16 60
答: 已知TL=常数,U=常数,Ra=常数 在稳态运行时,电动机的电磁转矩 T = TL= KtΦIa =常数 Φ减小, Ia增大 E=U-IaRa E减小 即E< E1
2.7
解:对于图2.3(a)所示的拖动系统,折算到电动机轴上的 等效转动惯量
机电传动控制冯清秀版课后习题答案(1)

机电传动控制冯清秀版课后习题答案(1)机电传动控制是机械工程中非常重要的学科,它涉及到机械传动、控制理论、电子技术等方面的知识。
针对这门课,学生们需要不断地进行知识的巩固和练习,因此课后习题无疑是必不可少的。
以下是机电传动控制冯清秀版课后习题的答案,供大家参考。
1. 在一台机床上,用传动皮带传动主动轮带动从动轮,主动轮的直径为50mm,从动轮的直径为150mm,主动轮转速为2000r/min,求从动轮的转速。
答:设主动轮的转速为n1,从动轮的转速为n2,主动轮的半径为r1,从动轮的半径为r2。
根据传动比公式:n1/n2=r2/r1,代入数据可得:n2=n1r1/r2=2000×50/150=666.7r/min。
因此,从动轮的转速为666.7r/min。
2. 一台电动机通过齿轮减速器和链传动装置输出动力,电动机的转速为1500r/min,齿轮减速器的传动比为1:3,链传动装置的传动比为3:4,求输出轮的转速。
答:设输出轮的转速为n,齿轮减速器的半径为r1,链传动装置输出轮的半径为r2。
因为电动机的转速为1500r/min,齿轮减速器的传动比为1:3,所以齿轮减速器的输出轴转速为n1=1500/3=500r/min。
再根据链传动的传动比公式:n1/n2=r2/r1,代入数据可得:n=n1r1/r2×3/4=500×1×3/4=375r/min。
因此,输出轮的转速为375r/min。
3. 一台电动机通过齿轮减速器和带传动装置输出动力,电动机的转速为1000r/min,齿轮减速器的传动比为2:5,带传动装置的传动比为3:4,带轮的直径为200mm,求输出轮的线速度。
答:设带轮的线速度为v,带轮的半径为r,输出轮的半径为R。
电动机的转速为1000r/min,齿轮减速器的传动比为2:5,所以齿轮减速器的输出轴转速为n1=1000×2/5=400r/min。
机电传动控制课后习题答案《第五版》

习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TL TM<TLTM-TL<0说明系统处于减速。
TM-TL<0 说明系统处于减速T MT LT M> T L T M> T L系统的运动状态是减速系统的运动状态是加速T L T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机电传动控制课后习题答案1..习题与思考题第二章机电传动系统的动力学基础2.1说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2从运动方程式怎样看岀系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TLvO说明系统处于减速,TM-TL=O说明系统处于稳态(即静态)的工作状态。
2.3试列出以下几种情况下(见题 2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)22.7如图2.3 (a)所示,电动机轴上的转动惯量j M=2.5kgm ,转速n M=900r/min;中间传动轴的转动惯量J L=16kgm2,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3 血=Nm/NI=15TM-TL>0说明系统处于加速TM-TLvO 说明系统处于减速系统的运动状态是减速系统的运动状态是加速TL系统的运动状态是减速系统的运动状态是匀速2 2J=JM+J1/j + JL/j12=2.5+2/9+16/225=2.79kgm.2.8 如图2.3 (b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J i= J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05N m2,齿轮,滑轮和卷筒总的传动效率为0.83。
试球体胜速度v和折算到电动机轴上的静态转矩T L以及折算到电动机轴上整个拖动系统的飞轮惯量GD 2z.。
3 M=3.14*2n/60=99.43 rad/s.提升重物的轴上的角速度 3 = 3 M/j1j2j3=99.43/4*4*2=3.11rad/sv=3 D/2=0.24/2*3.11=0.373m/sT L=9.55FV/ n c n M=9.55*100*0.373/0.83*950=0.45NM2 2 2 2GD2Z= 5 GD M2+ GD L20L22 2=1.25*1.05+100*0.24 2/322=1.318NM 22.11在题2.11图中,曲线1和2分别为电动机和负载的机械特性,不是?第三章3.10 一台他励直流电动机的技术数据如下:P N=6.5KW,U N=220V, I N=34.4A, n N=1500r/min, R a =0.242 Q,试计算岀此电动机的如下特性:①固有机械特性;②电枢服加电阻分别为3Q和5Q时的人为机械特性;③电枢电压为U N/2时的人为机械特性;④磁通© =0.8© N时的人为机械特性;并绘岀上述特性的图形。
① n o = U N n N/(U N-l N R a)=220*1500/220-34.4*0.242试判断哪些是系统的稳定平衡点?哪些交点是系统的稳定平衡点交点是系统的平衡点交点是系统的平衡交点不是系统的平衡点交点是系统的平衡点=1559r/minT N=9.55P N/n N=9.55*6500/1500=41.38Nm② n=U/K e © -(R a+R ad)T/K e K 诃22 2=U/K e© -(R a+R ad)T/9.55K e2©当3Q n=854r/min当5Q n=311 r/min③n= U/K e © -R a T/9.55K e2© 2当U N=0.5U N时n=732 r/minn°=U N n N/2(U N-l N R/=780 r/min④n= U/0.8K e © -R a T/9.55K e2© 20.82 当© =0.8 © 时n=1517 r/min n o=U N n N/0.8K e©=1964 r/min3.15 —台直流他励电动机,其额定数据如下:P N=2.2KW,U N=U f=110V,n N=1500r/min, n N=0.8,R a=0.4Q , R f=82.7 Q。
试求:①额定电枢电流l An;;②额定励磁电流lfN③励磁功率Pf;④额定转矩TN⑤额定电流时的反电势;⑥直接启动时的启动电流;⑦如果要是启动电流不超过额定电流的2倍,求启动电阻为多少欧?此时启动转矩又为多少?①P N=U N I aN n N2200=110*1 aN*0.8I aN=25A②U f= R f I fNI fN=110/82.7=1.33A③ P f= U f I fN=146.3W④额定转矩T N=9.55P N/ n N=14Nm⑤额定电流时的反电势E N = U N-I N R a=110V-0.4*25=100V=110/0.4=275A⑦启动电阻2\> U N/ (R a+R st)R st>1.68 Q启动转矩K e =(U N-I N R a)/n N=0.066la= U N/ (R a+R st) T=K t I a=52.9A=9.55*0.066*52.9=33.34Nm3.21 一台直流他励电动机拖动一台卷扬机构,在电动机拖动重物匀速上升时讲电枢电源突然反接,试利用机械特性从机电过程上说明:①从反接开始到系统新的稳定平衡状态之间,电动机经历了几种运行状态?最后在什么状态下建立系统新的稳定平衡点?②各种状态下转速变化的机电过程怎样?①从反接开始到系统到达新的稳定平衡状态之间状态,反向电动状态,稳定平衡状态.电动机正向电动状态由a到b特性曲线转变;反接制动状态转速逐渐降低,到达c时速度为零,反向电动状态由c到f速度逐渐增加.稳定平衡状态,反向到达f稳定平衡点,转速不再变化.第四章4.6有一台三相异步电动机,其技术数据如下表所示。
型号P N/kW U N/V满载时I st/INTst/T NT ma(T Nn N/r■1min IN/A n N X 100cos©Y132S-63220/38096012.8/7.2830.75 6.5 2.0 2.0,电动机经历了电动机正向电动状态,反接制动试求:①线电压为380V时,三相定子绕组应如何接法?②求n o,p,S N,T N,T s订max和1 st;③额定负载时电动机的输入功率是多少?①线电压为380V时,三相定子绕组应为Y型接法.②T N=9.55P N/n N=9.55*3000/960=29.8NmTst/ T N=2Tst=2*29.8=59.6 NmT max/ T N=2.0 T max=59.6 NmI st/I N=6.5I st=46.8A一般n N=(O.94-O.98)n o n o=n N/O.96=1OOO r/minSN= (n o-n N)/ n o=(1OOO-96O)/1OOO=O.O4P=60f/ n 0=60*50/1000=3③n =P N/P输入P 输入=3/0.83=3.614.11有一台三相异步电动机,其铭牌数据如下:① 当负载转矩为250N • m时,试问在N和U'=0.8U N两种情况下电动机能否启动?T N=9.55P N/ n N=9.55*40000/1470=260NmTst/T N=1.2Tst=312NmTst=KR2U2/ ( R22+X2O2 )=312 Nm时电动机能启动。
312 Nm>250 Nm 所以U=UN当U=0.8U 时Tst= ( 0.82) KR2U2/ ( R22+X2Q2)=0.64*312=199 Nm所以电动机不能启动。
Tst<TL②欲采用Y-△换接启动,当负载转矩为0.45 T N和0.35 T N两种情况下,电动机能否启动?Tst/=Tst A/3=1.2* T N /3=0.4 T N当负载转矩为0.45 T N时电动机不能启动当负载转矩为0.35 T N时电动机能启动③若采用自耦变压器降压启动,设降压比为0.64,求电源线路中通过的启动电流和电动机的启动转矩。
I N= P N/ U N n N cos© N V3=40000/1.732*380*0.9*0.9 =75Al st /l N =6.5 I s =487.5A降压比为0.64时电流=K 2 |st2=0.642*487.5=200A电动机的启动转矩 T= K 2 Tst=0.642312=127.8 Nm第五章5.13有一台直流伺服电动机, 当电枢控制电压 Uc=110V 时,电枢电流I a1=0.05A ,转速m=3000r/min;加负载 后,电枢电流I a2=1A,转速n 2=1500r/min 。
试做出其机械特性 n=f 仃)。
2KM 3KM3KM6.16试设计一台异步电动机的控制线路。
要求:①能实现启停的两地控制; ②能实现点动调整;③能实现单方向的行程保护;④要有短路和长期过载保护。
电动机的电磁转矩为 T=BI a NLD/2,5.14若直流伺服电动机的励磁电压一定, Uc=50V 时,n 等于多少?n 0=120Uc/ n NBLD 电压与转速成正比当电枢控制电压Uc=100V 时,理想空载转速 n 0=3000r/min;当,当 Uc=50V 时,n o 等于1500 r/min 第六章6.7电磁继电器与接触器的区别主要是什么?接触器是在外界输入信号下能够自动接通断开负载主回路 达不同的控制目的..继电器主要是传递信号,根据输入的信号到6.16要求三台电动机 1M 、2M 、3M 按一定顺序启动:即 1M启动;停车时则同时停。
试设计此控制线路。
启动后,2M 才能启动;2M 启动后3M 才能SBI n7SB1 m >_ 1KM1KM n-「一 SB21KM 2KMFUII 〔I 【1FRM8.17为了限制电调整时电动机的冲击电流,试设计它的电气控制线路。
要求正常运行时为直接启动,而点动调整时需输入限流电阻。
6.18试设计一台电动机的控制线路。
要求能正反转并能实现能耗制动。
2KM6.20容量较大的鼠笼式异步电动机反接制动时电流较大, 速原则设计其控制线路。
应在反接制动时在定子回路中串入电阻,试按转2KM3SBEII2KM 1KM1KM*Un >1KM2KM>厂1KS *LIi 1SB①1M先启动后,才允许2M启动;②2M先停止,经一段时间后1M蔡自动停止,且2M可以单独停止;③两台电动机均有短路、长期过载保护。