采煤机滚筒自动调高技术的分析
采煤机滚筒调高控制算法研究

式 中 c 表 示 CS , 1 , O s y T表示 s 其它 同理 。坐标 系 i y, n Ⅱ相 对坐 标 系 I的坐标 变换 为 :
维普资讯
20 07年第 4 期
煤
矿
机
电
・ 9・
T= , 3 T・T=r Y y卢cTasm , m)=  ̄ ( ,,)r ( ,: P  ̄ n m
立 , 图 1 见 。
X
由采 煤机 运 行 状 况及 移架 操 作 过 程 知 : r2 一r /
< <r 2, r2< <r 2 一r 2< <7 2 r 一r / / r , r / / r 。根 /
据空 间坐 标变 换原 理 , 标 系 Ⅱ 相 对坐 标 系 I的坐 坐
y, 而矢 量 m( m , 为初 始 坐 标 系 I的坐 标原 m , m ) 点 O到被 测坐 标系 Ⅱ的坐 标原 点 O 的空 间矢量 。
采煤 机 的运动姿 态对 滚筒 高度 的影 响和摇 臂油 缸行
程 的控制 算法 。
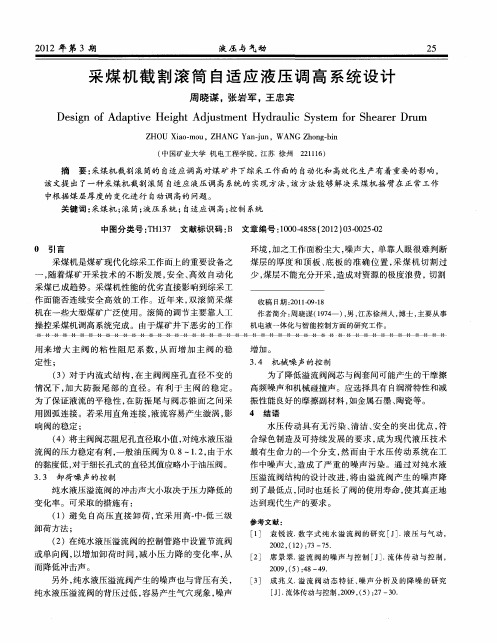
1 采煤 立 坐标 系 , 轴 垂 直 采煤 机 机身 指 向工 作 面 推 进 方 向 , y轴 平 行 采煤 机机 身 沿工 作 面指 向左侧 , z轴 垂直 、 y轴 由右 手 规 则建
0 0 0 】L 0 J 0 0 】L 0 0 】 Jo J
I—
—
L j
图 1 采 煤 机 坐 标 系及 其 变换 图
设初 始坐标 系 I 0X YZ , 施 记 忆 控制 时 为 实 的采 煤 机坐标 系 Ⅱ为 0X 。 ( =12 3 … ) i 、 、… 。根 据 坐标变 换 原 理 坐 标 系 I 绕 轴 旋 转 O角 , 引, 先 l
c lnd rf rd u l v lr g lto y i e o r m e e e u ain.
采煤机滚筒自动调高的液压控制方法

机床与液压
MACHI NE T0OL & HYDRAUL I CS
Fe b . 2 01 3
第4 1 卷 第 4期
Vo 1 . 41 No . 4
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 3 8 8 1 . 2 0 1 3 . 0 4 . 0 2 9
X u z h o u J i a n g s u 2 2 1 1 1 6 ,C h i n a )
Ab s t r a c t :S h e a r e r d r u m a u t o m a t i c h e i g h t a d j u s t m e n t i s o n e o f t h e k e y t e c h n o l o g i e s o f r e a l i z i n g t h e a u t o m a t i o n o f c o a l m i n i n g .
矿井下实验证 明:采ห้องสมุดไป่ตู้该方法 时 ,在 自动跟 踪采煤 机记忆 切割 路径 的基础上 能够 有效识 别 出滚 筒切 割到 岩石 时的异 常状
态 ,并对滚筒高度做 自动液压调节 ,能够满足复杂地质条件下采煤机滚筒 自动调高的控制要求 。
关键词 :采煤机 ; 自动调高 ;液压控制 ;记忆截割 ;煤岩分界
中 图分 类 号 :T I M2 1 . 6+1 文献 标 识 码 :A 文 章 编 号 :1 0 0 1— 3 8 8 1( 2 0 1 3 )4—1 0 0— 2
A Hy d r a u l i c C o n t r o l Me t h o d o f A u t o ma t i c He i g h t Ad j u s t me n t f o r S h e a r e r Dr u m
采煤机截割滚筒自适应液压调高系统设计
() 4 将主阀阀芯阻尼孔直径取小值 , 对纯水液压溢
流 阀的压力 稳 定有 利 , 般油 压 阀为 08~12 由于水 一 . .,
的黏度低 , 于细长孔式 的直径其 值应略小 于油压 阀。 对 3 3 卸荷 噪 声的控 制 .
定性 ; ( )对 于 内流式 结 构 , 主 阀 阀 座孔 直 径 不 变 的 3 在 情 况 下 , 大 防 振 尾 部 的 直 径 。有 利 于 主 阀 的 稳 定 。 加
增加 。
3 4 机 械 噪 声的控 制 .
为了降低溢流阀阀芯与阀套间可能产生的干摩擦
高频 噪声 和机械 碰撞 声 。应选 择具有 自润滑特 性和减 振性 能 良好 的摩 擦 副材料 , 金属石 墨 、 如 陶瓷等 。
( )避 免 自高 压 直 接 卸 荷 , 采 用 高 . 低 三 级 1 宜 中.
卸 荷方 法 ;
[ ] 袁 锐 波. 字 式纯 水 溢 流 阀 的研 究 [ ] 液 压 与气 动 , 1 数 J.
2 0 , 1 )7 7 . 02 (2 :3— 5
( )在 纯水 液压 溢 流 阀的控制 管路 中设 置节 流 阀 2
Z U Xa — u Z A G Y njn WA G Z o gbn HO i mo , H N a - , o u N h n —i
( 中国矿业 大学 机 电工程学 院 , 江苏 徐州 2 11 ) 2 16
摘
要: 采煤 机截 割 滚 筒的 自适 应调 高对煤 矿 井下综 采 工作 面的 自动化 和 高效化 生产有 着重要 的影 响 ,
该 文提 出了一种 采煤机 截割 滚 筒 自适应 液压调 高 系统 的 实现 方 法 , 方 法能 够解 决 采煤 机 摇臂 在 正 常 工作 该
基于预测控制的采煤机滚筒自动调高系统
s mp i g p i n p e it e ag rt m a e d c e e ol o fu t a in a d o e s o to eg to e s e r rc ti g a ln o n i r dc i l o i t v h h v e r a d r e t cu to n v rh o fh i h ft h a e utn s l h
o h ae r m sd o r d ci e c n r li sa ih d wi h h o y a t o fp e itv o to .I h fa s e r rd u ba e n p e itv o to se tbl e t t e t e r nd meh d o r d ci e c n r 1 n t e s h
计 算 机 系 统 应 用
ht: ̄ wcSa r. t l pl . -. gc — o n
2I 0 2年 第 2 卷 第 4 期 I
基于预测控制 的采煤机滚筒 自动调高系
李 晓豁 ,李烨健 ,刘述 明,曹江卫
( 辽宁 工程 技术大学 机械 工程学 院,阜新 13 0 ) 2 0 0
摘
LIX io H u , —i n LI S u M ig CAO in — e a - o LI YeJa , U h - n , Ja g W i
采煤技术发展现状及趋势分析
采煤技术发展现状及趋势分析摘要:采煤技术的发展将带动煤炭开采各环节的变革,现代采煤技术的发展方向是高产、高效、高安全性和高可靠性,基本途径是使采煤技术与现代高新技术相结合,研究开发强力、高效、安全、可靠、耐用、智能化的采煤设备和生产监控系统,改进和完善采煤工艺。
关键词:采煤技术;发展;现状;趋势我国煤矿采煤技术的发展,受到了国外发达国家在采煤中应用液压支架电液控制系统的影响,在实际的操作中达到了高度的自动化。
在20世纪80年代中期以前,我国对于煤层的开采,尤其是高难度厚煤层的开采主要集中在分层开采的技术之上。
因为当时无论是煤矿理论还是煤矿装备都处于一种相对落后的状态,因此无论是生产安全还是生产管理难度都相对较大。
随着技术的不断发展,在1984年,我国成功的取得了综采放顶开采的试验,这标志着我国煤炭采煤技术的进步。
将电气自动化技术在煤矿采煤中得到应用,是国内煤炭行业发展的主要动力和长远目标。
1我国采煤技术存在的问题采煤技术水平仍然较低,技术装备较差,采煤机制造技术落后。
与国外同行业相比,在机电一体化、智能化、自动化的控制技术,产品可靠性技术,数字集成技术与计算机辅助设计技术,仍然存在较大差距。
在采煤机械化系统,运输系统、采场围岩控制系统、巷道准备系统和辅助运输系统技术装备较差,功率及生产能力较小,机械化程度和工效普遍不高。
引进消化国外先进设备方面不够。
在井下自救系统、避灾系统、个人防护装备水平仍然很低,对瓦斯等重大灾害预测预报的仪器、仪表还不能完全达到要求,对安全事故的防治技术及装备不能充分有效防治灾害或最大限度减轻灾害。
煤矿重大科技攻关课题难以实现,重大安全技术问题难以解决。
目前我国煤矿在“一通三防”、防治水、矿井深部地压、冲击地压、高温害和支护等方面存在许多技术难题,严重威胁着煤矿安全生产,这些涉及行业技术发展共性基础性和前瞻性的重大科技工作课题,国家支持范围和力度与过去相比大大减少。
2煤炭开采技术的发展趋势现代科学技术前沿具有明显的时域、领域和动态特性。
采煤机牵引部的自动调速机理与自动控制系统分析

采煤机牵引部的自动调速机理与自动控制系统分析摘要:本文将结合真实的煤矿案例,对采煤机牵引部的自动调速机理、自动控制系统进行详细的分析与探究,旨在能够进一步优化采煤机的系统,降低其结构的复杂性,进而提高工作效率,缓解工人的压力。
关键词:采煤机牵引部;自动调速;自动控制中图分类号:TD67 文献标识码:B 文章编号:前言对于采煤机而言,牵引部是其重要的组成部分之一,但在实际应用中很容易被损坏,影响着煤矿开采的进度。
由于煤矿开采的环境较为恶劣、复杂,所以就需要进一步提高采煤机牵引部力量、速度,增强其自身对煤矿环境的适应性,为解决采煤工作的问题提供保障。
对此,相关的研究人员、设计人员就应该加大研究与分析的力度,研制出性能更佳的零部件,进而增强采煤机牵引部的可靠性。
一、煤矿矿井概述该煤矿所处的位置属于向斜构造,其轴向为东西走向,长度在10千米左右,宽度为2.2千米,北翼的倾角在2度至5度之间,南翼的倾角在8度至12度之间,整体构造相对简单。
在本煤矿中,共包含2、3、4-1、4-2号煤层,为了提高开采效率,均采用,采煤机开展相关工作。
在煤矿中,4-2号煤层的特征如表1所述:表 1 4-2号煤层的特征二、采煤机牵引部的自动调速机理(一)自动调速的必要性分析(1)增加采煤机的牵引速度、力量和截割功率;(2)优化采煤机的自动调节特性,从而适应各种不同煤矿环境的需求,充分发挥其自身生产力优势。
由于在采煤的过程中,采煤机的司机无法准确估计工作面的实际变化,仅仅凭借自身的经验调节开采的速度,因此具有较强的盲目性,对此便需要将自动调速系统安装在牵引部上[1]。
对于采煤机而言,自动调速就是在根据牵引力、电动机功率的变化而自动调节速度,从而使采煤机能够一直处于满载的运行状态,保证采煤的工作质量与效率,同时还能够避免牵引机发生破坏。
在牵引机中,截割电机的实际负载受多方面因素的影响,如牵引速度、截深、采高、夹矸硬度、煤层硬度等。
综采工作面采煤机故障及预防措施
综采工作面采煤机故障及预防措施摘要:采煤机作为综采工作面的核心设备,其运行状况好坏直接影响煤矿产量及井下工人的劳动量。
某煤矿在用MG2×200/870-WD型采煤机在使用过程中频繁出现过载情况,经统计此机型为成熟机型,在周边煤矿使用较多且很少发生频繁过载现象。
采煤机在工作过程中频繁过载,既影响矿方产量,造成较大的经济损失,又对采煤机厂家企业形象造成较大影响,避免采煤机频繁过载是煤矿和采煤机厂家共同的目标。
关键词:综采工作面;采煤机;故障分析;预防措施引言煤炭作为我国一次能源消费的主体,其消费总量常年占比在60%左右。
煤炭开采经历了机械化、自动化阶段,并逐步进入智能化阶段。
近年来,国家逐步加大对煤矿智能化的建设力度。
《国家能源局关于促进煤炭工业科学发展的指导意见》提出:目前煤矿安全生产形势依然严峻和复杂,必须加强煤矿自动化、数字化、智能化技术装备研发,提高煤矿安全保障能力。
1主要功能该采煤机采用手动和自动两种开启方式,当采煤机自动模式出现故障后,操作人员可进行手动开启;采煤机具有自身监测功能,采煤机运行过程中通过传感器收集的各项参数,通过控制器集中控制作用实现采煤机全方位监控;采煤机具有断电保护功能,当采煤及运行过程中发现电压、电流及温度超标时会及时发出警报,并进行断电停机保护动作。
2综采工作面采煤机故障及预防措施2.1采煤机过载原因分析针对矿方使用采煤机时发生的频繁过载问题,对该矿工作面地质条件、采煤机使用情况及外部供电情况进行了了解。
该矿综采工作面为一次采全高,工作面长200m,采高1.5m,沿顶板截煤,煤层局部不稳定,含长度约50m的10~20cm厚的岩石;每个生产班更换约15个截齿;导向滑靴在正常范围内磨损,行走部和销排啮合正常;井下全部设备仅由1台移动变压器供电,牵引电机时常处在欠压工作状态;工作面截矸石时基本满速截煤。
此外,随机读取某一生产班8h的采煤机牵引和截割电机电流数据,并按截割过载时间占比、牵引过载时间占比及正常截煤时间占比进行汇总。
基于记忆切割法的滚筒式采煤机调高系统自动化性能研究

R ———滚筒直径,m;
c———大摇臂长度,m;
°).
β———大摇臂调高角度,(
活塞杆位置 a 与变量β 存在如下关系:
π
β =θ6 +θ4 -θ2 - 2
c2 +b2 -L2
0
θ4 =a
r
c
co
s
2
b
c
(
3)
(
4)
b2 +L02 -a2
(
θ6 =a
r
c
co
s
5)
2
bL
式中:θ4 ———大、小摇臂的夹角,(
的阶跃响应进行仿真研究.
1 调高系统模型建立
1
1 滚筒采煤机调高系统原理
采煤机调高系统示意如图 1 所示.采煤机调高
系统主要由左滚筒、左调高油缸、左牵引电机、右
牵引电机、右调高油缸及右滚筒组成.左右调高油
缸一侧与 采 煤 机 机 身 铰 接, 另 一 侧 与 杠 杆 机 构 铰
接,通过左右调高油缸的伸缩推动杠杆机构,从而
和下降的响应时间以及不同行走速度时采煤机调高
系统的轨迹跟踪阶跃响应进行研究,具体设置参数
为:油缸杆径 110 mm, 油 缸 行 程 160 mm, 油 缸
油缸有杆腔的流量连续性方程为:
V1 dP1
dx
(
P1 -P2)+
7)
+Cη(
d
t
t
βe d
式中:Q1 ———杆腔流量,m3/s;
Cη———泄露系数;
自动化性能最优速度区间为 10~13 m/s.
稳态值差值 为 10 mm. 而 采 煤 机 滚 筒 从 最 大 高 度
2800 mm下降 至 -100 mm 所 需 时 间 为 6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采煤机滚筒自动调高技术的分析
【摘要】采煤机械是进行破煤和装煤的机器,是机械化和综合机械化采煤工作面的主要设备之一。
目前,煤矿井下广泛使用的采煤机械有两类:滚筒式采煤机和刨煤机。
滚筒采煤机是以螺旋滚筒作为工作机构的采煤机械,当滚筒旋转并截入煤壁时,利用安装在滚筒上的截齿将煤破碎,并通过滚筒上的螺旋叶片将破碎下来的煤装入刮板输送机。
刨煤机是一种采用刨削方式落煤的采煤机械,刨刀刨削煤壁将煤刨落,刨落的煤在刨头犁形斜面的作用下被装入输送机送出采煤工作面。
本文主要介绍了滚筒式采煤机的种类、组成、原理和旋转方向,并阐述了滚筒自动调高技术,对于指导采煤机的工作具有重要参考价值。
【关键词】采煤机;滚筒;种类;组成;自动调高;控制条件
1 滚筒式采煤机的种类
由于滚筒式采煤机的采高范围大,对各种煤层适应性强,能截割硬煤,并能适应较复杂的顶底板条件,因而得到了广泛的应用。
刨煤机要求的煤层地质条件较严,一般适用于煤质较软不粘顶板、顶底板较稳定的薄煤层或中厚煤层,故应用范围较窄。
但是刨煤机结构简单,尤其在薄煤层条件下劳动生产率较高。
滚筒式采煤机的种类较多,按工作机构的数量可分为单滚筒和双滚筒,前者多用于薄煤层,后者多用于中、厚煤层;按牵引方式可分为链牵引与无链牵引采煤机;按牵引部位置可分为内牵引和外牵引;按牵引部动力可分为机械牵引、液压牵引与电牵引;按牵引部的调速方式可分为液压调速、机械调速和电机调速等。
2 滚筒采煤机的主要组成部分
滚筒采煤机的类型很多,但基本上以双滚筒采煤机为主,其基本组成部分也大体相同。
2.1 电动机及其电气设备
电动机及其电气设备主要包括电动机1和电气控制箱13。
电动机1是采煤机的动力部分,它通过两端出轴驱动滚筒和牵引部。
电动机为防爆型鼠笼式。
电气控制箱13内装有各种电控元件,以实现各种控制及电气保护。
2.2 牵引部
牵引部的作用是带动采煤机在工作面作往复移动,以实现采煤机的连续割煤和装煤。
牵引部主要包括牵引部减速器和牵引机构。
牵引部2通过其主动链轮与固定在工作面两端的牵引链3相啮合,使采煤机沿工作面移动。
牵引机构可分为有链牵引和无链牵引两类。
2.3 截割部
截割部的主要功能是完成采煤工作面的截煤和装煤,由左、右截割电机,左、右摇臂减速箱,左、右滚筒,冷却系统,内喷雾系统和弧形挡板等组成。
截割部耗能占采煤机装机总功率的80%-90%,因此,研制生产效率高和比能耗低的采煤机主要体现在截割部。
2.4 附属装置
附属装置主要包括挡煤板7、底托架8、电缆拖移装置12、供水喷雾冷却装置以及调高、调斜等装置。
底托架8用来固定整个采煤机,并经其下部的四个滑靴9使采煤机骑在刮板输送机的槽帮上。
采空区侧两个滑靴套在输送机的导向管上,以保证采煤机的可靠导向。
底托架内的调高油缸10用来使摇臂升降,以调整采煤机的采高。
调斜油缸11用来调整采煤机的横向倾斜度,以适应煤层沿走向起伏不平时的割煤要求。
采煤机的电缆和供水管靠拖缆装置12夹持,并由采煤机拖着在工作面输送机的电缆槽中移动。
为降低电动机和牵引部的温度,采煤机还设有专门的供水系统和内、外喷雾系统。
3 滚筒采煤机的工作原理
单滚筒采煤机上行工作时,滚筒割顶部煤并把落下的煤装入刮板输送机,同时跟机悬挂铰接顶梁,割完工作面全长后,将弧形挡煤板翻转180°;接着,机器下行工作,滚筒割底部煤及装煤,并随之推移工作面输送机。
这种采煤机沿工作面往返一次进一刀的采煤法叫单向采煤法。
双滚筒采煤机工作时,前滚筒割顶部煤,后滚筒割底部煤。
因此双滚筒采煤机沿工作面牵引一次,可以进一刀;返回时又可以进一刀,即采煤机往返一次进二刀,这种采煤法称为双向采煤法。
4 滚筒的旋转方向
采煤机滚筒的旋转方向的确定原则是有利于装煤和机器的稳定性。
为了输送机推运煤,滚筒的旋转方向必须与滚筒的螺旋线方向一致。
对逆时针(站在采空区侧看滚筒)旋转的滚筒,叶片应为左旋;顺时针旋转的滚筒,叶片应为右旋。
即符合“左转左旋,右转右旋”的规律。
对于单滚筒采煤机,使用在左工作面的滚筒,应顺时针旋转,使用右旋滚筒。
使用在右工作面的滚筒,应逆时针旋转,使用左旋滚筒。
对于双滚筒采煤机,为了保证采煤机的工作稳定性,双滚筒采煤机两个滚筒的旋转方向应相反,以使两个滚筒受的截割阻力相互抵消,因此,两个滚筒必须具有不同的螺旋方向。
两个转向相反的滚筒有两种布置方式:一是前顺后逆。
采用这种方式,采煤机的工作稳定性较好,但滚筒易将煤甩出打伤司机,且煤尘较大,影响司机正常操作。
二是前逆后顺。
采用这种方式,采煤机工作稳定性较差,易振动,但装煤效果好,煤尘少。
对机身较重采煤机,机器振动影响不大。
因此,大部分采煤机都采用“前逆后顺”的方式,即左滚筒为左旋叶片,逆时针旋转;右
滚筒为右旋叶片,顺时针旋转。
5 滚筒自动调高技术
滚筒自动调高技术是实现采煤机自动化的关键技术之一。
研制出工作可靠,有一定分辨率的煤岩分界传感器,是实现采煤机真正意义上的滚筒自动调高的关键。
5.1 滚筒静态调控模型
图1为采煤机滚筒调高系统简图。
滚筒调控时,滚筒摆动速度
5.2 滚筒调高采样控制条件
滚筒在进行自动调高时,需要根据上一截割循环在各采样点的变化规律,控制下一截割循环。
在不同的截割循环下,滚筒调高采样的控制条件也不相同,其调控参数也会发生变化,调控条件:
(1)在相邻的截割循环相同的采样区间内采煤机牵引速度是不同的,这会使在一个采样区间内运行时间不同,必会影响再现规律。
(2)在采样区间的两个采样点的差值大小是不同的,因此,不能用同一滚筒速率K 来调整。
(3)采煤机的滚筒调高通常采用手动、液动或电磁换向阀的定量、开关控制的液压系统,因此滚筒的调高速度基本是恒定的,调高的位移量取决于控制通断时间长短来进行调控。
6 结语
综上所述,在对采煤机滚筒自动调高技术的分析时,需要根据煤矿的实际情况,结合滚筒采煤机的自身参数,明确其工作原理,采用滚筒自动调高技术,这样可以保证采煤机的正常运行,具有重要意义。
参考文献:
[1]刘春生,荆凯,杨秋.采煤机滚筒截割记忆程控的灰关联度计算新方法[J].煤炭学报,2006(05).。