导航卫星速度和加速度的计算方法及精度分析
卫星导航定位算法_常用参数和公式
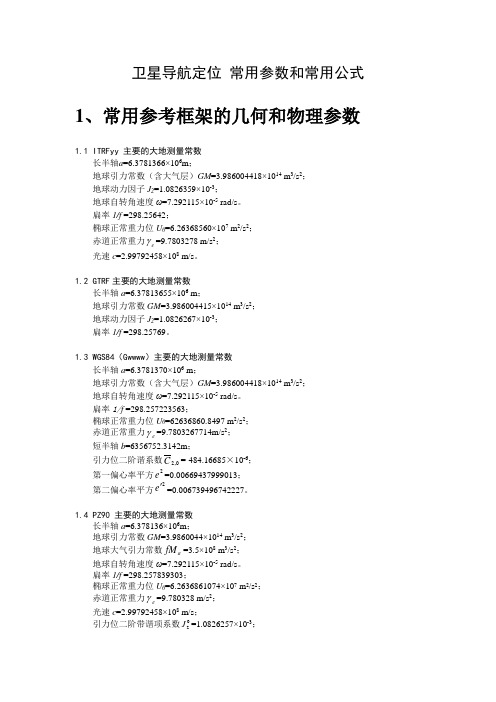
卫星导航定位常用参数和常用公式1、常用参考框架的几何和物理参数1.1 ITRFyy 主要的大地测量常数长半轴a=6.3781366×106m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球动力因子J2=1.0826359×10-3;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.25642;椭球正常重力位U0=6.26368560×107 m2/s2;γ=9.7803278 m/s2;赤道正常重力e光速c=2.99792458×108 m/s。
1.2 GTRF主要的大地测量常数长半轴a=6.37813655×106 m;地球引力常数GM=3.986004415×1014 m3/s2;地球动力因子J2=1.0826267×10-3;扁率1/f =298.25769。
1.3 WGS84(Gwwww)主要的大地测量常数长半轴a=6.3781370×106 m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.257223563;椭球正常重力位U0=62636860.8497 m2/s2;γ=9.7803267714m/s2;赤道正常重力e短半轴b=6356752.3142m;引力位二阶谐系数C=-484.16685×10-6;2,0第一偏心率平方2e=0.00669437999013;e'=0.006739496742227。
第二偏心率平方21.4 PZ90 主要的大地测量常数长半轴a=6.378136×106m;地球引力常数GM=3.9860044×1014 m3/s2;fM=3.5×108 m3/s2;地球大气引力常数a地球自转角速度ω=7.292115×10-5 rad/s。
航天器加速度测量方法和数据处理算法设计
航天器加速度测量方法和数据处理算法设计摘要:航天器的加速度测量是航天工程中非常重要的一项技术。
本文将介绍航天器加速度测量的方法和数据处理算法的设计。
首先,我们将讨论加速度测量方法中常用的传感器,包括加速度计和陀螺仪。
然后,我们将探讨航天器在不同工况下的加速度测量原理。
最后,我们将介绍常用的数据处理算法,包括滤波算法和数据分析方法。
通过这些方法和算法的设计,我们可以准确测量航天器的加速度,并为航天工程提供有效的数据支持。
1. 引言随着航天技术的不断发展,航天器的加速度测量在航天工程中扮演着至关重要的角色。
航天器加速度的准确测量不仅可以帮助工程师了解其姿态和状态,还可以为航天任务中的导航、控制和飞行安全提供重要的数据支持。
因此,设计一种准确可靠的航天器加速度测量方法和数据处理算法具有重要的实际意义。
2. 航天器加速度测量方法2.1 加速度计加速度计作为航天器加速度测量的主要传感器,通过测量加速度产生的力来确定航天器的加速度。
常用的加速度计有压电加速度计、微机械加速度计和光纤加速度计等。
每种加速度计都有其独特的工作原理和特性,工程师可以根据实际需求选择适合的加速度计。
2.2 陀螺仪除了加速度计,陀螺仪也是一种常用的航天器加速度测量传感器。
陀螺仪通过测量转动角速度来间接推导航天器的加速度。
陀螺仪的工作原理基于角动量守恒定律,常见的陀螺仪有机械陀螺仪、光纤陀螺仪和微机械陀螺仪等。
与加速度计相比,陀螺仪能够提供更高的精度和稳定性。
3. 航天器加速度测量原理航天器在不同工况下的加速度测量原理略有不同。
在自由飞行状态下,航天器的加速度测量主要受到重力加速度和惯性力的影响。
当航天器进行加速或减速时,其加速度测量还会受到推力和空气阻力等外部力的影响。
因此,在设计航天器加速度测量方法时,需要考虑不同工况下的影响因素,确保测量结果的准确性和可靠性。
4. 数据处理算法设计4.1 滤波算法航天器加速度测量中常常面临噪声和干扰的问题,因此需要设计有效的滤波算法来降低噪声和干扰的影响。
测绘技术中的导航卫星轨道参数计算方法

测绘技术中的导航卫星轨道参数计算方法导航卫星轨道参数计算是测绘技术中的重要环节,它为全球定位系统(GPS)、北斗导航系统、伽利略导航系统等提供了精准的卫星定位和导航服务。
在这篇文章中,我将介绍测绘技术中常用的导航卫星轨道参数计算方法。
我国的北斗导航系统是目前世界上发展最为迅猛的卫星导航系统之一。
为了保证北斗卫星系统的精准定位和导航能力,需要准确计算卫星的轨道参数。
在测绘技术中,常用的导航卫星轨道参数计算方法有“数值积分法”和“天文方法”。
数值积分法是导航卫星轨道参数计算中常用的一种方法。
它基于牛顿第二定律和万有引力定律,通过对卫星的运动轨迹进行数值计算来得到卫星的位置和速度。
数值积分法的优点是计算结果准确,适用范围广。
但是,它的计算过程比较复杂,需要大量的计算资源和时间。
另一种常用的导航卫星轨道参数计算方法是“天文方法”。
天文方法是通过观测卫星在天空中的位置和运动轨迹,利用天文学的知识和方法来计算导航卫星的轨道参数。
天文方法的优点是计算过程相对简单,无需大量的计算资源。
然而,它的准确度受到观测条件和天气等因素的限制,可能存在一定的误差。
除了这两种方法外,还有其他一些导航卫星轨道参数计算方法被广泛应用于测绘技术中。
例如,基于差分定位技术的轨道参数计算方法可以通过对接收机接收到的卫星信号进行处理,进而计算出卫星的轨道参数。
这种方法的优点是计算过程简单快捷,适用于现场实时测量。
此外,还有一些高级的计算方法被应用于导航卫星轨道参数的计算中。
比如,卡尔曼滤波方法、最小二乘法和粒子滤波方法等。
这些方法通过对测量值和预测值进行迭代运算,逐步优化计算结果,提高了轨道参数计算的精度和稳定性。
当然,这些方法的计算过程相对复杂,需要较高的专业知识和技术。
综上所述,导航卫星轨道参数计算是测绘技术中不可或缺的一环。
不同的计算方法各有优劣,适用于不同的应用场景。
如何选择合适的方法,并在实际应用中准确计算出导航卫星的轨道参数,是测绘技术工作者需要不断探索和研究的课题。
近地卫星速度计算公式文

近地卫星速度计算公式文近地卫星速度计算公式。
近地卫星速度是指卫星在绕地球运行时的速度,是卫星运行轨道的重要参数之一。
计算近地卫星速度的公式可以通过牛顿力学和开普勒定律来推导得出。
在本文中,我们将介绍近地卫星速度的计算公式及其推导过程。
首先,我们需要了解一些基本的物理概念。
在地球引力场中,卫星绕地球运行的轨道是一个椭圆形状的椭圆轨道。
根据开普勒第二定律,卫星在轨道上的速度是不断变化的,但其动能和势能之和保持不变。
这意味着卫星在轨道上的速度取决于其离地球的距离。
接下来,我们将推导近地卫星速度的计算公式。
根据牛顿第二定律,卫星在轨道上受到的向心力与其质量和加速度成正比,与离地球的距离平方成反比。
假设卫星质量为m,离地球的距离为r,地球的引力加速度为g,则卫星在轨道上的向心力可以表示为:F = m g = m (G M / r^2)。
其中,G为引力常数,M为地球的质量。
根据开普勒第二定律,卫星在轨道上的速度v与其离地球的距离r之间存在关系:v = sqrt(G M / r)。
因此,我们可以得到近地卫星速度的计算公式:v = sqrt(G M / r)。
其中,v为卫星在轨道上的速度,G为引力常数,M为地球的质量,r为卫星离地球的距离。
根据这个公式,我们可以计算出卫星在不同轨道高度上的速度。
在实际应用中,近地卫星速度的计算公式可以帮助工程师和科学家确定卫星的轨道参数,从而保证卫星能够稳定运行并实现其预定的任务。
此外,这个公式也为航天工程和卫星导航系统的设计提供了重要的参考依据。
总之,近地卫星速度的计算公式是通过牛顿力学和开普勒定律推导得出的,它可以帮助我们计算出卫星在不同轨道高度上的速度。
这个公式在航天工程和卫星导航系统的设计中具有重要的应用价值,为人类探索太空和开展卫星应用提供了重要的理论支持。
希望本文能够帮助读者更好地理解近地卫星速度的计算方法,并对相关领域的研究和应用产生积极的影响。
卫星导航系统精度评估方法分析

卫星导航系统精度评估方法分析卫星导航系统是一种基于卫星定位技术的导航系统,可以为用户提供准确的位置、速度和时间信息。
对于卫星导航系统的用户来说,精度是其最为关注的性能指标之一。
因此,评估卫星导航系统的精度是至关重要的。
卫星导航系统的精度评估方法有多种,可以从不同的角度对其进行评估。
以下是几种常用的卫星导航系统精度评估方法:1. 静态测试法静态测试法是在已知的参考点上进行测试,通过与参考点测量结果的比对来评估卫星导航系统的精度。
这种方法通常可用于评估卫星导航系统的位置精度。
在测试过程中,可以选择多个参考点分布在不同区域,以全面评估卫星导航系统的覆盖范围和位置测量的精度。
2. 动态测试法动态测试法是在不同的移动场景下进行测试,通过与地面真实测量结果的比对来评估卫星导航系统的精度。
这种方法通常可用于评估卫星导航系统的速度和位置精度。
在测试过程中,可以模拟不同的运动轨迹和速度,以全面评估卫星导航系统在不同条件下的精度表现。
3. 差分处理法差分处理法是在已知参考站点与测试站点之间建立差分基线,通过比对差分结果来评估卫星导航系统的精度。
这种方法可以使用实时差分或者后处理差分两种方式进行。
实时差分方法通常用于实时导航应用,后处理差分方法通常用于精密定位应用。
差分处理法的优点是能够消除卫星导航系统和接收机的各种误差,提高测量结果的精度。
4. 数学模型法数学模型法是通过建立卫星导航系统的误差模型来评估其精度。
这种方法通常需要对卫星导航系统的误差源进行建模,并利用数学方法对误差进行估计和处理。
数学模型法的优点是能够对卫星导航系统的各种误差进行分析和优化,提高其精度。
综上所述,卫星导航系统的精度评估方法包括静态测试法、动态测试法、差分处理法和数学模型法等多种方法。
不同的评估方法适用于不同的评估场景和需求。
在评估卫星导航系统的精度时,可以选择合适的方法或者采用多种方法相互验证,以保证评估结果的准确性和可靠性。
需要注意的是,在进行精度评估时,还需考虑到卫星导航系统本身的性能特点、测量误差和环境干扰等因素的影响。
GNSS定位技术的测量精度分析与提升
GNSS定位技术的测量精度分析与提升引言:全球导航卫星系统(GNSS)是一种基于卫星信号的定位技术,已经广泛应用于航空、海洋、军事、地质勘探等领域。
然而,GNSS定位技术的测量精度一直是研究和实践的热点问题。
本文将从原理分析、误差来源、精度评估和提升方法等方面对GNSS定位技术的测量精度进行深入探讨。
一、GNSS定位技术的原理分析GNSS定位技术是利用空间中的卫星系统发送信号,接收器接收到这些卫星信号后,根据信号的传播时间和距离计算出自身的位置和速度。
其中,常用的卫星系统包括GPS、GLONASS、Galileo和北斗等。
对于单点定位来说,GNSS接收器需要同时接收到至少4颗卫星的信号,通过计算卫星信号的传播时间差和距离差来确定自身的位置。
而对于相对定位和差分定位来说,需要同时接收到更多的卫星信号,以提高定位的精度和可靠性。
二、GNSS定位误差的来源GNSS定位误差的来源可以分为系统误差和环境误差两大类。
系统误差主要包括卫星钟差、接收机钟差、卫星轨道误差等,而环境误差则涉及到大气延迟、多径效应等。
1. 环境误差大气延迟是指卫星信号在穿过大气层时受到的延迟,由于大气层的折射和折射率的变化导致信号传播速度的畸变。
多径效应是指信号沿着不止一条路径传播到接收器,导致接收到的信号包含主导路径和反射路径的混合信号。
2. 系统误差卫星钟差是指卫星内部时钟的不精确性,这会导致卫星信号传播时间的偏差。
接收机钟差是指接收机内部时钟的不准确性,同样会影响信号传播时间的计算。
卫星轨道误差是指卫星真实轨道与广播星历之间的差异。
三、GNSS定位精度的评估方法为了评估GNSS定位技术的精度,通常使用精度评估指标和误差椭圆等方法进行分析。
1. 精度评估指标精度评估指标通常包括定位误差、位置精度、速度精度等。
定位误差是指实际位置和测量位置之间的偏差,可以通过计算定位点与参考点之间的距离或者偏移角度来评估。
位置精度是指多次测量得到的位置结果的统计特性,可以通过标准差或概率密度函数来表示。
国内卫星导航系统差分机轨道要素实时精度计算

国内卫星导航系统差分机轨道要素实时精度计算随着卫星导航系统的广泛应用,人们对导航定位的精度要求也越来越高。
而差分机轨道要素实时精度计算是卫星导航系统中的关键技术之一。
本文将介绍国内卫星导航系统差分机轨道要素实时精度计算的概念、方法和应用。
一、概念差分机轨道要素实时精度计算是指通过差分技术对卫星导航系统的轨道要素进行实时计算并提高其精度的过程。
差分技术是利用多个接收机同时接收卫星信号,并通过比较接收到的信号来消除大气延迟等误差,从而提高定位精度。
二、方法差分机轨道要素实时精度计算主要有以下两种方法:1.无电离层单频差分技术无电离层单频差分技术是利用卫星导航系统的L1频段信号进行差分计算。
该技术主要通过解算单频信号的伪距观测值差分,消除大气延迟误差,提高定位精度。
这种方法适用于无法接收到L2频段信号的普通接收机,对于一般的导航定位需求已经能够满足。
2.多频差分技术多频差分技术是利用卫星导航系统的L1和L2频段信号进行差分计算。
L1和L2频段信号的传播速度不同,因此通过对两个频段信号的伪距观测值进行差分,可以进一步消除大气延迟误差,提高定位精度。
这种方法适用于对定位精度要求较高的应用场景,如航空航天、测量等领域。
三、应用差分机轨道要素实时精度计算在国内卫星导航系统中的应用主要体现在以下几个方面:1.导航定位差分机轨道要素实时精度计算可以大幅提高卫星导航系统的定位精度,从而为航空、汽车导航、船舶导航等行业提供更准确的定位服务。
用户可以通过差分技术获得更精确的坐标、速度等位置信息,提高了导航定位的可靠性和准确性。
2.测量领域差分机轨道要素实时精度计算在测量领域也有重要的应用价值。
通过差分技术可以消除大气延迟误差,提高测量数据的准确性和可靠性。
这对于测量领域的各种精密测量工作非常重要,如地形测量、地震监测、变形监测等。
3.精密农业在现代农业中,差分机轨道要素实时精度计算可以用于精确农业管理。
通过差分技术提高农机定位的精确性,可以实现精确施肥、精确播种、精确除草等精密农业操作。
初三物理卫星运动速度与轨道分析

初三物理卫星运动速度与轨道分析物理卫星是指由人类制造并投放到宇宙空间用于载人或完成各项任务的人造天体。
在卫星的设计和发射过程中,运动速度和轨道分析是非常重要的。
本文将分析初三物理卫星的运动速度和轨道,并探讨其影响因素。
一、运动速度分析物理卫星的运动速度是指卫星在其轨道上绕地球运行时的速度。
按照牛顿第二定律,物理卫星在圆轨道上的向心力由万有引力提供。
根据向心力公式,可以得出以下公式:F = ma = mv² / r其中,F表示向心力,m表示卫星质量,v表示卫星运动速度,r表示轨道半径。
通过求解这个公式,我们可以得到物理卫星的运动速度v 与轨道半径r的关系。
在初三物理学中,我们学习到离心力公式:F' = mω²r其中,F' 表示离心力,m 表示卫星质量,ω 表示角速度,r 表示轨道半径。
根据离心力公式,我们可以推导出:v = ωr从上述公式可以看出,物理卫星的运动速度与角速度和轨道半径直接相关。
角速度越大,轨道半径越小,卫星的运动速度就越快。
二、轨道分析物理卫星的轨道分析是指对卫星运动轨道的研究和分析。
根据轨道的形状和特点,物理卫星的轨道可分为圆轨道、椭圆轨道、抛物线轨道和双曲线轨道四种。
1. 圆轨道圆轨道是指卫星在运行过程中与地球保持恒定距离,路径为圆形的轨道。
在圆轨道上,卫星的速度和向心力保持恒定,保证了卫星相对于地球的位置是恒定的。
圆轨道是最常见和最稳定的轨道。
2. 椭圆轨道椭圆轨道是指卫星运动路径为椭圆形的轨道。
在椭圆轨道上,卫星的距离和速度随着卫星在轨道上的位置而变化。
当卫星离地球较远时,速度较慢;而当卫星离地球较近时,速度较快。
椭圆轨道被广泛应用于通信、气象等领域。
3. 抛物线轨道抛物线轨道是指卫星运动路径为抛物线形的轨道。
在抛物线轨道上,卫星的运动速度足够大,使得卫星可以逃离地球的引力范围,进一步扩大其运动范围。
4. 双曲线轨道双曲线轨道是指卫星运动路径为双曲线形的轨道。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
导航卫星速度和加速度的计算方法及精度分析
李显;吴美平;张开东;曹聚亮;黄杨明
【期刊名称】《测绘学报》
【年(卷),期】2012(041)006
【摘要】系统分析和总结基于广播星历和精密星历的导航卫星速度和加速度的计
算方法,包括:①基于广播星历的公式法;②基于导航卫星位置序列的数值差分法;
③基于导航卫星位置序列的解析差分法。
首先在基于广播星历的公式法中,推导出Kepler根数型、GEO型、位置一速度型等3类广播星历计算卫星速度和加速度的解析计算公式,通过比较表明:①广播星历解析公式总体计算精度较低;②位置一速度型广播星历的加速度计算精度高,而Kepler型广播星历的速度计算精度高;③高轨道卫星的速度、加速度计算精度优于中轨卫星。
进一步分析基于精密星历的数值差分法和解析差分法的卫星速度和加速度的计算方法。
两种方法的比较研究表明,解析差分法虽然在计算效率上具有优势,但利用短期位置序列建立的解析模型难以表达卫星的真实轨道特征,导致计算的卫星速度较数值差分法低,但两者的加速度计算精度相当。
最后通过来自于连续运行参考系统(CONtinuesoperationalreferencesystem,CORS)站点上的实测数据对各方
法的计算精度进行评估和比较,结果表明数值差分法具有最高的速度和加速度计算精度。
【总页数】9页(P816-824)
【作者】李显;吴美平;张开东;曹聚亮;黄杨明
【作者单位】国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073;国防科学技术大学机电工程与自动化学院,湖南长沙410073
【正文语种】中文
【中图分类】P228
【相关文献】
1.基于广播星历的卫星速度和加速度实时计算方法 [J], 孙伟;孔莹;段顺利;丁伟
2.高度重视加强领导密切协作圆满完成工业发展速度计算方法改革试行工作——访自治区工业发展速度计算方法改革领导小组组长、自治区统计局副局长 [J], 周鸿恩
3.用瞬心和速度投影定理的解析法确定机构速度和加速度 [J], 钱安
4.速度、速度变化量和加速度的比较 [J], 李艳英
5.浅议速度和加速度的教学 [J], 刘海;韩文娟;肖立勇
因版权原因,仅展示原文概要,查看原文内容请购买。