红外控制的RS_485通信系统设计说明
RS_485网络通信的无极性接线设计

第 31卷第 12期 2005年 12月
EL
电子工 ECTRON IC
程 EN
师 G IN
EER
V oDl.
31 ec.
No. 12 2005
RS2485网络通信的无极性接线设计
吴 强 1 , 周小芳 2
(1. 东南大学计算机科学与工程系 , 江苏省南京市 210096; 2. 东南大学电子管厂 , 江苏省南京市 210096)
序进行预检 ,当某一个从模块的通信线路极性接正确 , 对应位 ( bi )就填上“0”,反之就填上“1”。在以后真正 进行通信时 ,当主模块和某一个从模块通信时 ,先查一 下此表 ,再控制异或门进行信号反相或不反相 。 RS2 485极性校正程序如图 4所示 。
图 3 自动修正通信线路极性的示意图
此 方法的优点是 :不需要改变从模块的任何硬件 连接 ,只需要在主模块中增加 2 个异或门和占用 1 根 I/O 口线 ,可使整个系统改动最小 (因为 1个主模块对 于 n个从模块 ) 。主模块中需要加 RS2485极性校正程 序 ,该程序的主要功能是自动测试各个从模块 RS2485 极性是否接反 ,并加以记忆 ,在以后的使用时自动校正 接错的从模块极性 。
本自动修正方案已经成功地应用于多点故障定位 检测系统 ,效果很好 。
参 考 文 献
[ 1 ] 尤一鸣 ,等. 单片机总线扩展技术. 北京 :北京航空航天大 学出版社 , 1996
·书讯 ·
注塑ห้องสมุดไป่ตู้电子电路技术 (附光盘 )
李忠文 , 朱国宪 , 编著 2006年 1月出版 16开 /45元
本书汇集了各种主要机型注塑机电气电路 (继电器控制型 、PLC控制型 、微机控制型 ) ,电子电路 (温度控制器 、时间继电器 、电 子放大器 、微机控制器 )和微机控制系统电路 。为方便初学者使用 ,还介绍了电气图形符号和注塑机电路图 、印刷板图的绘制和识 读 。本书附光盘 ,内容为注塑机微机控制系统的应用程序示例 。
小区周界红外对射报警系统-485

小区周界红外对射报警系统设计方案设计者:广州市艾礼富电子科技有限公司公司官网:www.艾礼富.商标目录一、公司简介及资质荣誉 (3)1.1 公司简介 (3)1.2企业资质荣誉证书 (3)二、方案背景 (3)三、项目概述 (4)四、系统介绍 (4)4.1系统应用效果图 (4)4.2系统优势 (5)4.3系统拓扑图 (5)五、系统组成及产品特点 (5)5.1总线网络报警主机(型号:AL-9480C ) (6)5.2 中文液晶键盘(型号:AL-930A) (7)5.3报警联动视频管理平台中心软件(型号:AL-2016S-H含加密狗) (8)5.4 多功能联动输出模块(型号:AL-7416E) (9)5.5声光警号(型号:AD-103) (10)5.6四光束100米红外探测器(LED大屏数码版) (型号:ABH-100S) (10)5.7 四光束红外对射探测器安装支架(型号:AL-50I/L) (13)5.8 单防区报警模块 (型号:AL-7480-1A) (13)5.9 对射单独供电电源(型号:DC-12V/2A) (14)六、设备供电与传输 (14)七、系统配置参考清单 (14)八、维护保养及故障排除 (15)九、成功案例节选 (14)十、精选案例图片 (15)一、公司简介及资质荣誉1.1 公司简介广州市艾礼富电子科技有限公司成立于2003年,是一家专业从事入侵探测及报警控制系统等研发、生产、销售于一体的民营高新技术企业;旗下拥有VOANDOS维安达斯、艾礼富、艾立富AILIFU、WISEI卫士等系列品牌;公司立足于安防行业,坚持持续发展的战略方针,历经18年沉淀和发展,已经成为中国安防行业-防盗报警领域的知名品牌企业!广州市艾礼富电子自成立以来,坚持自主品牌研发、生产、销售的产品有:激光入侵探测器、微波入侵探测器、防爆探测器、脉冲电子围栏、红外对射、红外光栅、双鉴电子围栏、张力电子围栏、泄露电缆探测器、各种环境探测器以及分线、总线、IP等大型及超大型防盗报警控制系统、报警管理软件等;公司坚持以“百年品牌”为经营目标,以“高科技,平民化”为产品市场导向,立志于和广大的合作伙伴一起,为创建平安、幸福的社会环境贡献应有的力量。
RS485总线通信系统的设计及实现毕业论文

RS485总线通信系统的设计及实现毕业论⽂本科学⽣毕业论⽂论⽂题⽬:RS485总线通信系统的设计与实现学院:年级:专业:姓名:学号:指导教师:摘要⽆论是⼯业控制还是信号测试领域,实现不同通讯协议的数据融合都有着迫切需要。
但是⽬前市场中存在的协议转换器只能满⾜两种协议之间的转换,如RS485转RS232,USB转RS485等,但是经常存在着多种数据总线并存的情况,因此研制多种总线协议转换的设备有着⽐较⼤的实际意义。
除此之外,⽬前接⼝标准的RS485总线通信协议不统⼀,需设计⼀个⾼效稳定的通信协议。
基于以上原因,本论⽂提出⼀种基于⾼速RS485的多总线通信系统。
整个系统包含多个RS485节点,各个节点包含的通讯接⼝包括RS232,RS485和USB,从⽽实现这三类总线的通讯协议的转换。
设计并实现了⼀种适⽤于微机和单⽚机之间串⾏通信的通信协议,采⽤RS485简便,通信可靠性⾼总线标准,可⽤于⼯业测控和控制现场。
实验结果表明,该通信协议是切实可⾏的,达到了预期的设计要求。
关键词RS485总线;主从式;多机通信;通信协议AbstractWhether in the field of industrial control or signal test, the achievement of data fusion which is based on different communication protocol is urgent needed. However, in the current market, protocol converter can only achieve conversion between two protocols, such as RS485 to RS232, USB to RS485 and so on. Cases of coexistence data bus, it has great practical significance to develop an equipment for protocol conversion among different buses.Based on the reasons above, a high-speed RS485-based multi-bus communication system is presented in this paper. The entire system which is used to realize the three categories of bus communication protocol conversion consists of someRS485 nodes, each node contains the communication interfaces including RS232, RS485 and USB. In the practical application, the number of nodes can be changed as required to formsystem, for achievement of data fusion between a variety of bus communication protocol.Key wordsRS485 bus; Serial Bus; Protocol Conversion; Communication protocol⽬录摘要............................................................................................................................. I Abstract .....................................................................................................................II 第⼀章绪论 (1)1.1 研究背景及意义 (1)1.2 RS485总线通信系统研究现状 (2)第⼆章RS485介绍 (4)2.1 RS485标准 (4)2.2 MAX485芯⽚介绍 (4)2.3 RS485总线组⽹⽅式 (5)2.4 RS485⽅式构成的多机通信原理 (5)第三章系统协议及硬件设计 (7)3.1 RS485通信协议设计 (7)3.1.1 物理层设计 (7)3.1.2 数据链路层设计 (8)3.1.3 应⽤层设计 (8)3.1.4 通信协议 (8)3.2 系统硬件设计 (10)3.2.1 PC与RS485总线的接⼝ (10)3.2.2 RS485⽅式构成的多机通信 (10)3.2.3 单⽚机与PC机串⾏通信系统构成 (11)第四章系统的软件实现 (12)4.1 上下位机的关系 (13)4.2 下位机通信软件的设计 (14)4.3 上位机通信软件的设计 (16)4.3.1 通信协议设计 (16)4.3.2 多机传输 (17)4.3.3 差错控制 (18)4.4 程序设计 (19)第五章系统问题解决措施 (20)5.1 总线隔离 (20)5.2 失效保护 (20)5.3 电磁⼲扰问题 (20)结论 (22)参考⽂献 (23)致 (24)第⼀章绪论所谓通信,不仅仅要实现数据的传输,更应该体现准确性,也称可靠性传输,最好具有⼀定的纠错和检错能⼒。
USB—UART/RS485/红外接口转换器设计
( El e c t r i c P o we r Re s e a r c h I n s t i t u t e ,F u j i a n El e c t r i c P o we r Co mp a n y L i mi t e d ,F u z h o u 3 5 0 0 0 7, Ch i n a )
c o nt a i ns t h e de s i gn of h a r d wa r e c i r c ui t ,M CU s of t wa r e( f i r m wa r e )d e s i gn a nd PC d r i v e r s s e t t i ng .Th e br o a d s c o pe o f t he d e s i gn, h a s a
Ab s t r ac t :To me e t t he n e e ds of da t a t r a ns mi s s i on on di f f e r e nt o c c a s i o ns ,t hi s p a pe r i nt r o du c e s a me t ho d b a s e d o n A Tm e g a XU 2 mi c r o
关 键 词 :US B; 接 口; ATme g a XU2
中 图分 类 号 :TP 2 9
文 献标 识码 :A
De s i g n o f US B— U AR T/ RS 4 8 5 / l n f r a r e d I n t e r f a c e Co n v e r t e r ※
c o n t r o l l e r t o i mp l e me n t t h e c o n v e r s i o n b e t we e n US B b u s i n t e r f a c e a n d U ART/ RS 4 8 5 / i n f r a r e d i n t e r f a c e . S e t t i n g a j u mp wi r e i n t h e c i r c u l t ,t h e s o f t wa r e( f i r mwa r e )a u t o ma t i c a l l y i d e n t i f i e s j u mp wi r e t o s e l e c t UART,RS 4 8 5 a n d i n f r a r e d i n t e r f a c e f e a t u r e d . Th i s d e s i g n
基于RS485通信的远程数据采集与控制系统设计
基于RS485通信的远程数据采集与控制系统设计摘要:近年来,随着科学技术的进步和发展,数据采集和控制技术正在向全新的阶段发展,信息的采集与传输更加智能化、数字化和远距离化;在一些环境条件恶劣、异常危险的工业生产现场,如深井、对人体危害极大的强辐射空间,远程数据采集与控制系统能很好地取代人到现场进行数据采集的工作。
关键词:RS485通信;远程数据采集;控制系统设计;设计的基于RS485通信的远程数据采集与控制系统克服了传统Rs232通信距离短、传输速率低的缺陷,系统终端设备可以完成温度、湿度、压力等模拟信号的采集。
主从式的控制结构很好地解决了系统扩展问题,数据采集量大,实时性强。
1 通信原理在PC与多个单片机应用系统构成的多机系统中,一般采用主从式通信,主机处于主导和支配地位,下位机一般以中断方式来接收和发送。
在这种通信机制下,各下位机没有主动通信权,这样就限制了下位机主动从主控机下传其需要的数据或主动上传相关数据给主控机。
在本实际应用系统中,主控机主动读取或发送数据给下位机时,一般数据量较大,而下位机主动上传或下传数据时,往往数据量较小(约几十至几百个字节/次)。
根据系统的实际需要,在下位机中采用中断和查询两种方式与主控机通信:当主控机需要发送或读取下位机数据时,下位机以中断方式来接收和发送;而当某下位机根据工作状态需要上传数据或从主控机下传相关数据时,进入查询方式通信模块,将通信请求标志置位,等待主控机响应其请求。
主控机没有主动通信任务时,定时巡检各下位机,查看是否有通信请求。
若有则响应其请求完成数据传输。
为了保证通畅有序的双向数据通信,避免通信混乱,在主控机主动与某一下位机通信时,暂停定时巡检,不响应下位机的通信请求,待通信任务结束后再恢复定时巡检。
2 基于RS485通信的远程数据采集与控制系统设计2.1 下位机通信软件。
下位机通信软件采用单片机C语言来编写,以功能强大、产生代码效率高的Keil C51编译器来编译、调试工具。
RS485通讯方式详解

RS485通讯方式详解智能仪表是随着80年代初单片机技术的成熟而发展起来的,现在世界仪表市场基本被智能仪表所垄断。
究其原因就是企业信息化的需要,企业在仪表选型时其中的一个必要条件就是要具有联网通信接口。
最初是数据模拟信号输出简单过程量,后来仪表接口是RS232接口,这种接口可以实现点对点的通信方式,但这种方式不能实现联网功能。
随后出现的RS485解决了这个问题。
下面我们就简单介绍一下RS485。
RS485接口RS485采用差分信号负逻辑,+2V~+6V表示“0”,- 6V~- 2V表示“1”。
RS485有两线制和四线制两种接线,四线制只能实现点对点的通信方式,现很少采用,现在多采用的是两线制接线方式,这种接线方式为总线式拓朴结构在同一总线上最多可以挂接32个结点。
在RS485通信网络中一般采用的是主从通信方式,即一个主机带多个从机。
很多情况下,连接RS-485通信链路时只是简单地用一对双绞线将各个接口的“A”、“B”端连接起来。
而忽略了信号地的连接,这种连接方法在许多场合是能正常工作的,但却埋下了很大的隐患,这有二个原因:(1)共模干扰问题: RS-485接口采用差分方式传输信号方式,并不需要相对于某个参照点来检测信号,系统只需检测两线之间的电位差就可以了。
但人们往往忽视了收发器有一定的共模电压范围,RS-485收发器共模电压范围为-7~+12V,只有满足上述条件,整个网络才能正常工作。
当网络线路中共模电压超出此范围时就会影响通信的稳定可靠,甚至损坏接口。
(2)EMI问题:发送驱动器输出信号中的共模部分需要一个返回通路,如没有一个低阻的返回通道(信号地),就会以辐射的形式返回源端,整个总线就会像一个巨大的天线向外辐射电磁波。
由于PC机默认的只带有RS232接口,有两种方法可以得到PC上位机的(1)通过RS232/RS485转换电路将PC机串口RS232信号转换成RS485 RS485电路:信号,对于情况比较复杂的工业环境最好是选用防浪涌带隔离珊的产品。
485总线设计方案加上位机扩展
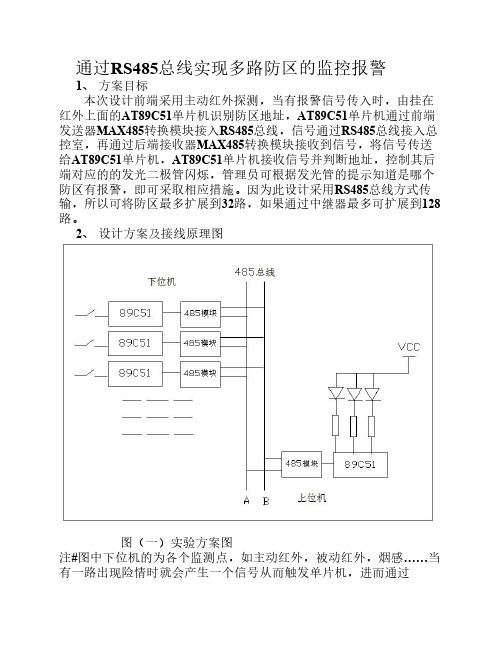
通过RS485总线实现多路防区的监控报警1、方案目标本次设计前端采用主动红外探测,当有报警信号传入时,由挂在红外上面的AT89C51单片机识别防区地址,AT89C51单片机通过前端发送器MAX485转换模块接入RS485总线,信号通过RS485总线接入总控室,再通过后端接收器MAX485转换模块接收到信号,将信号传送给AT89C51单片机,AT89C51单片机接收信号并判断地址,控制其后端对应的的发光二极管闪烁,管理员可根据发光管的提示知道是哪个防区有报警,即可采取相应措施。
因为此设计采用RS485总线方式传输,所以可将防区最多扩展到32路,如果通过中继器最多可扩展到128路。
2、设计方案及接线原理图图(一)实验方案图注#图中下位机的为各个监测点,如主动红外,被动红外,烟感……当有一路出现险情时就会产生一个信号从而触发单片机,进而通过MAX485转换模块接到RS485总线上后由其传输给上位机从而进行处理,上位机根据所给的信号地址依次对应防区上的模拟地图(模拟地图与所对应防区事先对应)进行驱动发光,同时为了更方便直接显示,我们可以给单片机上加个喇叭驱动无论哪一路有险情时,后面的喇叭都会响,从而让保安人员能够第一时间去查看有险情的地方,从而防止漏报……当险情排除后通过复位键后将其复位,这些在下面的接线图中会显示出来。
扩展:图中仅画出大概思路应该这样并未将8路或者更多路表示出来……这些以后在具体模拟或现场会表现出来。
按理C51的有四个接口动可以驱动,当防区多的话必然不够,因此需要扩展,我们采用的是利用单片机与74HC164等若干芯片实现对其扩展,类似于中继器,从而进行扩展……图(二)接线图(上位机未扩展)注#图中的接线图仅画了一路来表示,实际中有N路,先用一路与上位机尝试实现通信……3、实现报警的信号能被单片机识别的思路图中AT89C51单片机P1口接主动/被动红外探测,单片机识别的语言是高级语言,即二进制。
基于RS 485的远程控制系统设计
基于RS 485的远程控制系统设计作者:孙宇翔,全厚德来源:《现代电子技术》2009年第19期摘要:在信息化条件下,根据战场模式和战场环境的变化,采用新思路和新方法提出一种能够实现远程控制功能的系统的设计方案。
该系统基于RS 485通信协议,采用单片机作为逻辑芯片,具有实时性强、编程简单、成本低、工作可靠的特点。
关键词:C8051F020单片机;RS 485;MAX485;串行通信中图分类号:TN91文献标识码:A文章编号:1004-373X(2009)19-049-04Design of Long-distance Control System Based on RS 485SUN Yuxiang,QUAN Houde(Ordnance Engineering College,Shijiazhuang,050003,China)Abstract:Basing on transformation of the mode and the surroundings of battlefield,a scheme by using new notion and new method to realize the long-distance control system in the information-based condition.The system is based on RS 485,adopts C8051F020 as the logic element,the characteristics of which are shown as follows: real-time system,easy to program,low cost and working reliably.Keywords:C8051F020;RS 485;MAX485;serial communication0 引言某型防空指挥系统是一个以微型计算机为核心的模块化和节点化设计的网络系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第1章引言 (3)1.1RS-485通信技术的发展 (3)1.2设计任务与方案 (3)1.2.1设计任务 (3)1.2.2系统总体设计方案 (4)第2章系统硬件设计 (4)2.1硬件系统的结构 (4)2.2系统部件功能描述 (5)2.2.1AT89C51单片机 (5)2.2.2单片机最小应用系统 (7)2.2.3红外接收 (10)2.2.4MAX485接口电路 (11)2.3RS-485串口标准 (13)第3章系统的软件设计 (14)3.1MCS-51汇编语言简介 (14)3.2串行通信原理 (15)3.2.1数据通信的基本概念 (15)3.2.2串行通信的过程 (15)3.2.3串行通信协议 (16)3.3串行通信程序设计 (17)3.3.1串行口的结构和功能 (17)3.3.2选择串行口工作方式 (17)3.3.3串行口波特率的设置 (18)3.3.4初始化串口 (19)3.3.5程序的编制 (19)3.4红外通信原理 (20)3.4.1红外发送原理 (20)3.4.2红外解码原理 (21)3.5红外解码程序设计 (22)3.5.1延时子程序 (22)3.5.2解码子程序 (22)3.6RS-485程序设计流程图 (24)3.6.1数据接收部分 (25)3.6.2命令执行部分 (25)3.6.3数据发送部分 (26)第4章系统的调试 (28)4.1WAVE6000软件简介 (28)4.2程序调试 (28)4.3系统硬件的调试 (30)总结 (31)致 (32)参考文献 (32)附录一 (33)附录二 (34)第1章引言1.1 RS-485通信技术的发展单片机技术和PC机技术在现实生活中都起着不可取代的作用,而结合这两种技术的应用有着极大的发展前景。
单片机和PC机串行通信技术有着其特有的魅力,现已经在工业、农业、科研等各个领域广泛地应用。
它凭着成本低、实现简单等特点,在单片机与PC机的通信中占着一席之地。
如今形成了RS-232总线标准、RS-485总线标准、总线、CAN总线、无线通信、USB总线等并行发展的趋势。
可以预测单片机和PC机串行通信技术的应用将更为广泛,并随着其他新技术的发展而发展。
单片机与微机之间以RS-232通信最为常见,微机对外的两个串口COM1、COM2都是专门为RS-232通信而设置的。
虽然RS-232的通信方式方便,但它也有一些缺点。
例如,RS-232只能实现短距离通信,通常只有十余米,要实现长距离通信还得依赖于调制解调器。
另外,RS-232对地而言是共模传输方式,而各种电气干扰大多也是对地共模方式,它的抗干扰能力不理想。
RS-485通信方式与RS-232相比有很多优点,首先它的通信距离比RS-232要远得多,通常可以做到数百米甚至千米以上,而且还可以实现多点通信方式,从而可以建立一个小围的局域网,因而更有实用价值。
RS-485采用差分信号传输方式,它的抗干扰能力比RS-232强的多,即便在信号电压比较小的情况下也能获得稳定的传输。
所以RS-485通信方式比RS-232应用要广泛。
近年来,红外遥控技术在工业生产、家用电器、安全保卫以及人们的日常生活中的使用越来越广泛,特别是在家庭生活中,如电视、空调的遥控器,智能开关,电梯等。
利用红外遥控技术具有的控制简单、实施方便、传输可靠性高的特点,将红外遥控技术和RS-485通信技术结合起来,实现基于红外控制的RS-485通信系统。
这个通信系统将更加实用,也更容易实现。
研究这个课题对于了解RS-485通信系统、红外遥控技术都会有帮助。
1.2 设计任务与方案1.2.1 设计任务采用51单片机作为微处理器,设计出红外控制的RS-485通信系统。
要能过实现基于红外控制的,可靠的RS-485串行通信。
1.2.2 系统总体设计方案本次设计采用AT89C51单片机作为微处理器,51系列单片机以其优良的性价比,得到了广泛的应用。
其特点主要有以下几点:1.可靠性高因为芯片是按工业测控环境要求设计的,故抗干扰的能力优于PC 机。
系统软件(如:程序指令,常数,表格)固化在ROM 中,不易受病毒破坏。
许多信号的通道均在一个芯片,所以运作时系统稳定可靠。
2.便于扩展片具有计算机正常运行所必需的部件,片外有很多供扩展用的(总线、并行和串行的输入/输出)管脚,很容易组成一定规模的计算机应用系统。
3.控制功能强具有丰富的控制指令。
如:条件分支转移指令,I/O 口的逻辑操作指令,位处理指令。
4.实用性好体积小,功耗低,价格便宜,易于产品化。
整个系统分为两大部分,第一部分是红外发射(红外遥控器),第二部分是红外接收电路。
本次设计所采用的红外遥控器是现成的,里面的发射芯片是LC7461。
红外接收电路包括红外接收和MAX485接口两部分。
当红外遥控器有键按下时,红外接收器接收到来自遥控发射器的红外信号,将收到的红外遥控信号转为电信号,经放大、调解、滤波后,经红外接收器将原编码输入到AT89C51的外部中断0的引脚,然后由AT89C51对接收到的原编码信号进行判断、识别,然后做出相应判断。
PC机通过MAX485芯片实现和单片机的通信,红外信号经过解码以后,按遥控器不同的键,在串口调试助手窗口会有不同的数字显示。
第2章系统硬件设计2.1 硬件系统的结构整个硬件系统是由红外接收模块和MAX485接口电路两大部分组成,红外接收模块的作用是将接收的红外信号转换为电信号,经放大、调解、滤波后,输入到AT89C51,然后由AT89C51对所接收的原编码信号进行判断、识别、然后做出相应的处理。
MAX485接口电路负责传送数据。
2.2 系统部件功能描述2.2.1 AT89C51单片机AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmable and Erasable Read Only Memory)的低电压,高性能CMOS 8位微处理器。
该器件采用ATMEL 高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
图2.1所示为AT89C51的引脚图,它的主要功能引脚有:1)电源引脚Vcc和VssVcc(40脚):电源端,为+5V。
Vss(20脚):接地端。
2)外接晶体引脚XTAL1和XTAL2XTAL2(18脚):接外部晶体和微调电容的一端。
在89C51片它是振荡电路反相放大器的输出端,振荡电路的频率就是晶体的固有频率。
若须采用外部时钟电路,则该引脚悬空。
要检查89C51的振荡电路是否正常工作,可用示波器查看XTAL2端是否有脉冲信号输出。
XTAL1(19脚):接外部晶体和微调电容的另一端。
在片,它是振荡电路反相放大器的输入端。
在采用外部时钟时,该引脚输入外部时钟脉冲。
3)控制信号引脚RSTRST(9脚):RST是复位信号输入端,高电平有效。
当此输入端保持两个机器周期(24个时钟振荡周期)的高电平时,该引脚输入外部时钟脉冲。
4)输入/输出端口P0、P1、P2和P3P0端口(P0.0~P0.7,39—32 脚):P0口是一个漏极开路的8位准双向I/O端口。
作为漏极开路的八路输出端口,每次能驱动8个LS型TTL负载。
当P0口作为输入口使用时,应先向口锁存器(地址80H)写入全1,此时P0口的全部引脚悬空,可作为高阻抗输入。
P1端口(P1.0~P1.7,1—8 脚):P1口是一个带有部上拉电阻的8位双向I/O端口。
P1的输出缓冲器可驱动(吸收或输出电流方式)4个TTL输入。
对端口写1时,通过部的上拉电阻把端口拉到高电位,这时可用作输入口。
P1作输入口使用时,因为有部的上拉电阻,那些被外部信号拉低的引脚会输出一个电流(I)。
ILP2端口(P2.0~P2.7,21—28 脚):P2口是一个带有部上拉电阻的8位双向I/O端口。
P2的输出缓冲器可驱动(吸收或输出电流方式)4个TTL输入。
对端口写1时,通过部的上拉电阻把端口拉到高电位,这时可用作输入口。
P2作输入口使用时,因为有部的上拉电阻,那些被外部信号拉低的引脚会输出一个电流(I)。
ILP3端口(21—28 脚):P3口是一个带有部上拉电阻的8位双向I/O端口。
P3口的输出缓冲器可驱动(吸收或输出电流方式)4个TTL输入。
P3口与其它的I/O口有很大区别,它除作为—般准双向I/O口外,每个引脚还具有专门的功能,见表2.1。
图2.1 AT89C51引脚图表2.1 端口引脚功能端口引脚第二功能P3.0 RXD (串行输入口)P3.1 TXD (串行输出口)P3.2 0INT(外中断0)P3.3 1INT(外中断1)P3.4 0T(定时/计数器0)P3.5 1T(定时/计数器1)P3.6 WR(外部数据存储器写选通)P3.7 RD(外部数据存储器读选通)2.2.2 单片机最小应用系统单片机最小应用系统是指仅使用单片机部资源辅以必需的外围电路所构建的简单的应用系统。
它包括:单片机的选择和单片机最小应用系统的设计。
通过单片机的选择,最大限度满足应用系统对硬件资源的要求,本次课程设计选用AT89C51单片机。
最小应用系统设计则是指单片机最基本的、最常用的外围电路设计。
时钟电路和复位电路就可以构成一个最小系统。
1)时钟电路时钟电路是单片机的心脏,它控制着单片机的工作节奏。
单片机工作时,是在统一的时钟脉冲控制下一拍一拍地进行着,这个脉冲是由时序电路发出的。
时钟信号可以由两种方式产生:一种是部方式,利用芯片部的振荡电路产生时钟信号;另一种为外部方式,时钟信号由外部引入。
AT89C51单片机有一个用于构成部振荡器的反相放大器,引脚XTAL1和XTAL2分别是放大器的输入、输出端。
外接石英晶体和瓷晶体构成自激振荡器。
这种方式称为部时钟方式,如图2.2所示。
如果振荡器已启振,则在XTAL2引脚上输出3V左右的正弦波。
振荡器的频率取决于晶振的频率。
电容C1和C2主要作用是帮助启振(谐振),其值的大小对振荡频率也有影响。
因此常用调节C1或C2的容量大小对频率进行微调,电容容量通常在20pF~100pF之间选择,当时钟频率为12MHz时其典型值为30pF。
本次设计就是采用部时钟方式。
图2.2 部振荡电路如果从外部时钟频率驱动器件,XTAL2可以不接,而从XTAL1接入,如图2.3所示。
对外部振荡器的信号没有特殊的要求,一般为0.5~12MHz的方波,方波的波形应尽量规。
图2.3 外部振荡电路2)复位电路复位是单片机的初始化操作。
其主要功能是把PC初始化为0000H,使单片机从0000H单元开始执行程序。