汽车麦弗逊悬架性能仿真和优化研究
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
麦弗逊悬架运动仿真分析
麦弗逊悬架运动仿真分析摘要一种三维模型提出了一个麦克弗森型转向悬架的运动行为。
通常的方法提出了主要参数的确定(主销后倾角,车轮外倾角,转向角等),在系统的操作因素的作用中,(这些参数)影响车辆的操纵。
输入数据一方面是悬架和转向几何,另一方面是支柱的移动和转向轮转向的转向,这是通过监测车辆而获得的。
该模型已被施加到一个标准的车辆,其结果的有效性已被证实。
关键词:计算机模拟;汽车悬架;麦弗森;三维运动模型。
1.导言麦弗逊悬架是目前被大量应用在大多数中小型轿车上的系统。
在麦弗逊悬架通常的结构中,其组成是一个支柱刚性地连接到车轮或者转向节。
支柱上部通过柔性联结连接在车身上,(柔性联结)由一个弹性元件和一个允许支柱转动的推力球轴承组成。
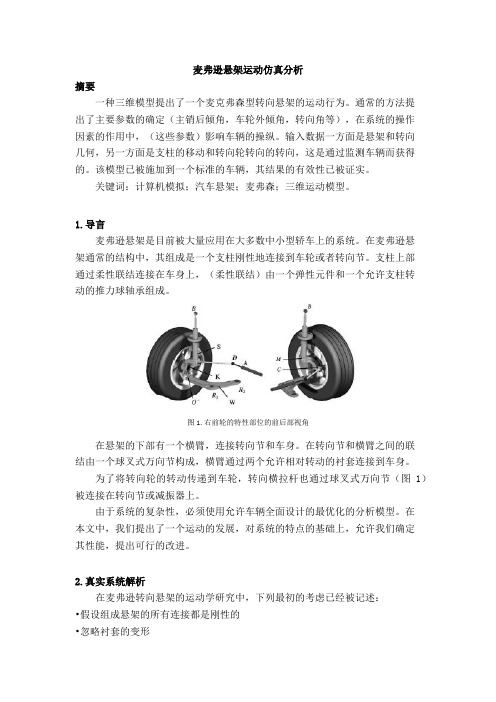
图1.右前轮的特性部位的前后部视角在悬架的下部有一个横臂,连接转向节和车身。
在转向节和横臂之间的联结由一个球叉式万向节构成,横臂通过两个允许相对转动的衬套连接到车身。
为了将转向轮的转动传递到车轮,转向横拉杆也通过球叉式万向节(图1)被连接在转向节或减振器上。
由于系统的复杂性,必须使用允许车辆全面设计的最优化的分析模型。
在本文中,我们提出了一个运动的发展,对系统的特点的基础上,允许我们确定其性能,提出可行的改进。
2.真实系统解析在麦弗逊转向悬架的运动学研究中,下列最初的考虑已经被记述:•假设组成悬架的所有连接都是刚性的•忽略衬套的变形•车轮的有效半径由轮胎的动态特性决定对与路面车轮相对应的系统的运动学分析揭示了总共7个元素:车身,横臂,转向节,减振器活塞杆,横拉杆,转向齿条,车轮。
这些元素的运动学连接在表1中被给出。
机构中的自由度(dof)通过Kutzbach准则计算,表达式为:dof=6×﹙7×车身-1﹚-4×﹙球叉式万向节﹚×3﹣2﹙﹚×5﹣1×﹙平动﹚×5-1×﹙圆柱﹚×4=5 (1) 在五个自由度中,仅有两个反映了车轮的运动:转向齿条的位置和支柱的平动。
麦弗逊式独立悬架的仿真分析和优化设计

某微型轿车麦弗逊悬架转向系统建模与性能仿真分析(中期报告)

河北工业大学本科毕业设计中期报告毕业设计(论文)题目:某微型轿车麦弗逊悬架转向系统建模与性能仿真分析专业:车辆工程学生信息:学号:110249 姓名:高立通班级:车辆111指导教师信息:姓名:卞学良职称:教授报告提交日期:2015年4月23日一.毕业设计总体设计要求运用UG软件建立麦弗逊悬架装置的零件模型,用虚拟装配技术进行装配建模,然后导入ADAMS,利用ADAMS软件建立麦弗逊悬架装置虚拟样机模型,对其工作性能进行仿真分析,得出仿真结果。
通过本次毕业设计,使学生掌握麦弗逊悬架装置建模和动态仿真的一般方法。
二•毕业设计进展情况经过这几周的建模、装配等工作,毕业设计取得了阶段性成果。
在建模之前查阅了与麦弗逊悬架相关的文献资料,初步了解了麦弗逊悬架的基本组成和工作过程,之后进行了建模装配和仿真。
为了防止麦弗逊悬架关键点的位置发生变动,在UG 里面直接画出各个零件装配在一起的图,图如下:1•零件图:2.装配图:车轮.毕业设计过程中的问题及其解决方法由于以前已经学习过UG所以在建模的过程中没有遇到什么问题四.下一步工作内容下一步的工作内容就是对麦弗逊悬架进行运动仿真,做出需要的性能曲线,其中主要用到所以下一步的首要任务就是先熟悉一下ADAM软件,然后把用UG建立的麦弗逊悬架模型导入其进行运动仿真。
ADAM运动仿真软件,ADAMS/VIEW软件,对汽车转向系统的建模(尽量简化) 转向时所需施加的力(移动副位移驱动)车轮跳动时左右两侧运动是否一致( ?) 内转向轮和外转向轮(理论值与实际值的对比) 横摆臂的建模外轮实际转向角函数 (外转角- --时间或位移) :曲线 1 外轮理论转向角函数 (内转角- --时间或位移) :曲线2内轮实际转向角函数 (内转角- --时间或位移) :曲线3【即理论】外轮实际转角与理论转角之差函数(外转角差 ---实际内转角):曲线4 内外车轮实际转角之差函数(实际转角差---实际外转角或实际内转角):曲线 5内外转向轮转角理论关系曲线:曲线 6 内外转向轮转角实际关系曲线:曲线 7(曲线6和曲线7合成在一张图上显示 如何做?)1方案X 2方案4沁方案2M 方案3图3不同方案内外转向轮转角的关系曲线【•r哽墀卑世壊转向拉杆位移驱动:线性位移驱动(大小?) 地面的驱动:正弦关系(-50mm---50mm )rsnsfeo —---一二阶拟合曲馥I11 | | ~ |0 50 104 W 2M转向图4. 9转向橫拉杆位移与醴胎转向角的二阶拟含曲线图1.驱动的函数表达式:60*sin (360d*time )车轮跳动量为(-60mm---60mm列 1 ・ ・-41rS040302O1O2.函数:DZ(MARKER_86, MARKER_89) (-60mm----60mm )mcK»e_lFU M C71ON_UL<1 VAR LAB-E_ C LA£&~------- -- U NCTIOH V< EA 1.QMeal 车轮跳动测量曲线3. 函数:ATAN(DY(MARKER_36, MARKER_59)/DZ(MARKER_59, MARKER_36))Mea2主销内倾角变化曲线〔Elli) LI &Li 『一O 3- 0.4 0.5 0.7 Timt 〔.we]09 1.0mDd«l_1FUMCTl^N Z VARIAB-E4. 函数:ATAN(DX(MARKER_59, MARKER_36)/DZ(MARKER_36, MARKER_59))Mea3主销外倾角变化曲线5. 函数:ATAN(DY(MARKER_85, MARKER_30)/DZ(MARKER_85, MARKER_30))AnayiifsMea4车轮外倾角变化曲线0.0Z : -■ :■FLNCTI'.-ARI^LE_CLAE 缶号合总J1FU M-CTI ON U EA 4: VAR IAQ LE€ LA55.'1 D4.401OJ 05 oe0.9 1.06.函数:DY(MARKER_91, MARKER_93)-DY(MARKER_90, MARKER_92)medal」FUNCTION UEA 5- VARIABLE CLASSTIIMea5车轮前束变化曲线从汽车的正上方向下看,由轮胎的中心线与汽车的纵向轴线之间的夹角称为前束角函数:ATAN(DY(MARKER_90, MARKER_91)/DX(MARKER_90, MARKER_91))IMea6车轮前束角变化曲线7.函数:DY(MARKER_85, MARKER_86)Mea7车轮接地点侧向滑移量定制函数图形(共5个):1>主销内倾角随车轮跳动量的变化曲线2>A"iys ■ _iSt_Rur[FUI4C Tl O N_ME>1_' - UN CTI ON^WEA_?]r/mccfvl 12.02.»3.0Antft Gfr ;>主销外倾角随车轮跳动量的变化曲线L:E :y”:・4藍 2; X Q23>Hndel 1[^—F 』hC!T 二丄’ 'f.j.FUNtT 心](EE )O DWO-M0-0.51 □Angh {<W J车轮外倾角随车轮跳动量的变化曲线河北工业大学本科毕业设计中期报告5>rn«tl 11QQ.0五 b N CTI Jh 」事 1: R U NCTICN H EA 叮0.0车轮前束值随车轮跳动量的变化曲线车轮前束角随车轮跳动量的变化曲线4>-:::Ar 且fysH La :L&n^EFi |.mE』100.0201&-«-0621;1$48』0Arjiysit: La&t_Rbr-15Q.O Lergth {mm)3.0 <5雄EX 站 ZZ Q2:T河北工业大学本科毕业设计中期报告车轮接地点侧向滑移量随车轮跳动量的变化曲线17213ifikER 3E閒磚甩匹■旳^Tl4.MARkE R_7 7 P?A RT14.cm,^T7:MARKER_79RART7.tnl7w^cm___ —亠「饌&施加约束后的悬架模型汽车悬架模型零件模型:[1].轮毂[2].轮胎[3].弹簧[4].转向器1>部件数量14:+ gs&aad.Pact 亍上tundj+ PAST1P=rt+ PART2+ PMT3Part.+ EAST4Faizt+ PARTS+ FARTf F"匸+ FART7F&rt+ PASTS P E"+E三二匕+ FART1Q fsEV+ FART11Earn+ PART 12F^Et+ FART13F=rt+ FART14Fact2>约束类型及其数量:JDIWT_1 J51WI_2 JOINT」Fixe且F raced J&int Spherical Joint ■SpheJaint Sphere cal Jcint-JOT NT, JDINT_SJ&nrr_^F Laced Jo intjionrr_7F ixed JointJOTKTS■SpheEisa 1 Jo£n^JDINT_3Spherxeal Jc±nt-JOINT 10Sptierica 1 ■T-cin,&JOINT_13Transla^lnnai JtrinTJ&INT_L4Translatiunal Joint;J10IKT_lo Translatioiial JoinxJOINT_L6IrA^slationftlJOINT_17R evolute Jdint2 evo il口匸e Jci ntJPRIM_1Inplane P:Eiinitive_J口丄口匸JPRIM_2Inplana P E imitive_J Q intGrAvicy_Fi^ldiirLalys±s_^lag5{L2>AMS_A2ia 1 y a i 3_^1 宜gm el Ha 七ezrxal+SPR IKG_L apzxng+SPRING 2spring转向系统分析:1> 函数:DY (MARKER_90, MARKER_91)Mea8:转向器位移曲线2>函数:ATAN(DX(MARKER_30, MARKER_93)/DY(MARKER_30, MARKER_93))Mea9外转向轮实际转角:壬:-5.0rnoOel 1FLSNCTIDH VEA 8: '.-AR IML= GLASS/7D05 1 0.3Anjlys^ L ;百 Run□斜 0.5 0.6 G7 0.E 09 IS2515^^ 13:M :0T_FU HCT lOh<MEA_S. VARI AE-E_二 LA SS £o o3>函数:ATAN(DX(MARKER_92, MARKER_45)/DY(MARKER_92, MARKER_45))Mea10内转向轮实际转角4>函数:ATAN(1/(D Y(MARKER_92, MARKER_45)/DX(MARKER_92,MARKER_45)+1200/2395))FUNGHON yEA GLASS 12Mea11 :外转向轮理论转角5>函数:ATAN(DX(MARKER_30,MARKER_93)/D Y(MARKER_30,MARKER_93))-ATAN(1/(D Y(MARKEF 2, MARKER_45)/DX(MARKER_92, MARKER_45)+1200/2395))FUNCTION UEA VARIABLE CLASS itMea12 :外转向轮实际转角与理论转角之差6>函数:ATAN(DX(MARKER_92, MARKER_45)/D Y(MARKER_92, MARKER_45))-ATAN(DX(MARKER_MARKER_93)/D Y(MARKER_30, MARKER_93))nn&c*_'FUNCTION WEA '3: '-■A^IAaLE CLASS 12Mea13内转向轮实际转角与外转向轮实际转角之差外转向轮实际转角与理论转角之差 随外转向轮实际转角 的变化内转向轮实际转角与外转向轮实际转角之差 随外转向轮实际转角 的变化7> model l Auty> s Lsi-t_R-u nW.0 (c#3)8> Aiurys«島冈唾{翊) 201^04-Zt 13:09:07纵坐标为车轮外转角红线为实际内外轮转角曲线蓝线为理论内外轮转角曲线。
麦弗逊式前悬架的优化及仿真

创 建 的模 型中( 图 1, 见 )包括主销 、 上摆臂 、 下摆臂 、 拉臂 、
转 向拉杆 、 向节 、 转 车轮 以及测试平 台。 并且将前悬架 的主销长 度、 主销 内倾 角 、 主销后倾角 、 摆臂长度、 上 上摆臂在 汽车横 向
图 2 悬 架下 摆 臂 有 限 元 模 态 分析 模 型
2 悬 架运 动特性 分析
前悬架模型仿真分析 的基本方法 。
基于建立 的前悬架 系统分 析模型 , 利用 A AMSC r D /a 软件
自带的试验台进行仿真 , 获得前 悬架平行跳 动过程 中前悬架参
的运动特性进行全面分析。
在汽车曲线行驶时悬架上的车身将发生侧倾引起汽车侧倾转向和变形转向因此悬架系统的运动学和动力学特性分析是研究整车操纵稳定性的基础由于麦弗逊式前悬架是比较复杂的空间机构过去常用简化条件下的图解法和多刚体动力学方法进行分析计算所得的结果误差较大近年来柔性多体动力学的发展及多体动力学分析软件的出现为复杂机械系统动力学分析提供了可靠的手段美国mdi公司开发的adams软件是世界上具有权威性的使用范围最广的机械系统动力学分析软件使用adams软件可以建立包括机电液一体化在内的任意复杂系统的多体动力学数字化虚拟样机模型本文将在应用adams软件基础上建立麦弗逊式独立悬架动力学仿真分析模型并对悬架的运动特性进行全面分析仿真分析模型的建立对模型的建立做如下假设前悬架中所有零部件都认为是刚体减振器简化为线性弹簧和阻尼各运动副内的摩擦力忽略不计轮胎简化为刚性体创建的模型中见图转向拉杆转向节车轮以及测试平台并且将前悬架的主销长度主销内倾角主销后倾角上摆臂长度上摆臂在汽车横向平面的倾角上摆臂水平斜置角下摆臂长度下摆臂在汽车横向平面的倾角和下摆臂轴水平斜置角等参数设置为设计变量通过优化这些设计变量以达到优化前悬架的目的1前悬架模型由于作用于车轮上各方向力和力矩都是经过下摆臂以及弹性元件传递到车架或承载式车身在这些力和力矩的作用下下摆臂将会发生变形引起车轮定位参数和汽车行驶方向的变化因此在模型中下摆臂应作为柔性体处理将柔性体的变形视为模态的线性叠加下摆臂的模态振型可通过有限元分析或试验模态分析得到对于图1中的下摆臂其主要构件包括衬套控制臂下盖板和球节等根据该车摆臂各构件图纸应用unigraphics软件建立其三维实体数模将数模输出到ansys有限元分析软件中进行几何模型的离散化材料特性定义等有限元模型处理和计算分析2为该车悬架下摆臂有限元模态分析模型悬架运动特性分析前悬架模型仿真分析的基本方法基于建立的前悬架系统分析模型利用adamscar软件自带的试验台进行仿真获得前悬架平行跳动过程中前悬架参数包括前轮外倾角前轮前束角主销外倾角轮距侧倾中心高度侧倾转向主销偏置偏置距悬架刚度等性能参数的变化曲线根据前人经验对这些曲线进行分析从整车操纵稳定性方面判定前悬架的优劣本文设定的平行跳动仿真的参数为跳15步上跳极限为40mm下跳极限为40mm如图3所示由于汽车曲线行驶时车身的侧倾使得车身外侧车轮相对地面向正的外倾角方向变化从而降低了承载较高的外侧车轮的
基于ADAMS/CAR环境下的麦弗逊悬架建模与仿真

点。 以地面为 X Y平面, 汽车中心对称面为 X 平面 , Z 通过前轮轮心连线 , 垂直 X 、 Z两平面的面为 Y YX Z 平面 , 取垂直 向上为 z轴正 向, 车身右侧 为 Y轴正
向, 以车 前进 方 向的反 方 向为 x轴正 向 。 23 模型 关键 点 的获 取 . 硬 点 是各 零 件 之 间连 接 处 的 关键 几 何 定 位 点 ,
I l — 砷
~ 0 I W
) 1 \ ’
\
. o8
确定硬点就是在子系统坐标系中给出零件之间连接 点的几何位置 。模型关键硬点的空间位置坐标和相
关系数是建立运动学模型的关键 ,从零部件装配图 上 可 以得 到 硬点 的坐标 值 。
24 仿真 模 型的 建立 .
沃尔沃等公司合作开发的整车设计软件包 ,集成了 他们在汽车设计 、 开发方面的专家经验 , 能够帮助工 程师快速建造高精度的整车虚拟样机 , 采用的用户 化 界面 是 根据 汽 车 工程 师 的 习惯 而 专 门设 计 的 , 包
括 整 车动 力 学模 块 ( eie ya c ) V hc nmi 和悬 架 设计 lD s
A A /A D MSC R是 MD 公 司与奥 迪 、 马 、 I 宝 雷诺 和
些 曲线来对悬架进行综合性能 的评价和分析圆 。 为分析国产 M V帅客前悬架 的性能 ,本文借 P 助A A S A D M / R模块 ,构建该悬架的运动学模型 , C
并对影 响车辆操稳性 的特性参数在汽车行驶 中的 变化进行了仿真分析。
模块 ( upni e g ) SsesnD s n 。对 于悬架 系统 来说 , o i AA S A D M / R在仿真结束后 , 自动计算出 3 多种 c 可 0 悬架特性 , 根据这些常规 的悬架特性 , 用户又可定义
麦弗逊前悬架的运动学仿真与结构优化
定 性 。主销后倾 角 过大 , 定力 矩变 大 , 样使 转 稳 这 向显得 沉重 ; 销后 倾 角过 小 , 定 力矩 减 少 , 主 稳 将 使行 驶不稳 , 高速 行驶时 车轮还会 摆振 。 后倾 角应 具有 随 车轮上 跳而增 加 的趋势 ,以抵 消制 动 点头 时后 倾角 减小 的趋 势 ,同时后倾 角在 车 轮跳 动过
程 中不 应 出现过大 的变 化 ,以免在 载荷 变化 时 出
2 悬架系统运动学仿真
悬架 运 动学分 析 的主要 内容 是研 究 车轮定 位 参 数与 车轮 跳动量 的关 系 ,从 中可 以得 到基本 的 车轮定 位及 变化 特性 信息 。本 文选取 左 右车 轮 同 步上下跳 动 ±5rm的常见 工况进 行仿 真 , 0 a 以左 侧 车轮参 数作 为研究 对象 , 果如 图 2所 示 。 结
( 图 1 示 ) 其中, 如 所 。 将所有 零部 件 ( 轮胎 除外 )
都简化为刚性体 ;零部件之间的连接都简化为铰 链, 内部 间隙忽 略不 计 ; 个零 部件 间 的运 动副 内 各
的摩 擦 力忽 略 不计 ; 型 车轮 外 倾 角 ( ) 前束 模 0 和 。 角 (.。) 过测 量得 到 ; 动学分析 不考 虑减震器 01 通 运 的阻尼 和 弹簧 的 刚度 ;轮 胎 的规格 为 156 R1, 8/0 5
3 5
- 2 36 -5 60
— — — —
35 2 35 1
85 5
- 0 57
侧关 键 硬 点 的坐 标
(见 表 1 , 然 后 修 改 )
车轮中心点 稳定杆与摆臂连接点 稳定杆与车身连接点
O 1 9 - 1 40
- 4 73 - 7 53 — O 39
麦弗逊悬架的虚拟设计及试验平台的研究开发【精编】

武汉理工大学硕士学位论文麦弗逊悬架的虚拟设计及试验平台的研究开发姓名:***申请学位级别:硕士专业:车辆工程指导教师:***20070501(6)缩短产品开发周期,提高产品质量及竞争力。
图3-1为ADAMS/vJew的设计主窗口,包括菜单、主工具箱、工作屏幕区和状态栏。
图3-1ADAMS/View的界面3.1.1虚拟样机几何建模1、几何体类型ADAMS/View可以产生4种类型的几何体:刚性形体、柔性形体、点质量和地基形体。
刚体形体的几何形状在任何时候都不会发生变化,在机械系统中将刚体形体称为刚性构体。
刚住形体有质量和惯性矩。
在力的作用下,柔住形体会发生变形,同刚性形体类似,柔性形体也有质量和惯性矩。
点质量的体积为零,它仅有质量而没有惯性矩。
地基形体没有质量和速度,其自由度为零,在任何时候都保持静止。
地基形体定义了地面坐标系的位置,在默认状态下,地基形体还是所有构件的速度和加速度的惯性参考坐标。
2、几何体坐标系每一个新产生的几何体都设有一个参考坐标系,即:构件机架坐标系。
在仿真分析过程中,几何体的尺寸和形状相对于该几何体参考系坐标静止不变,的单位(Units)命令,将模型的长度单位、质量单位、力的单位、时间单位、角度单位和频率单位分别设置为毫米、千克、牛顿、秒、度和赫兹;在ADAMs菜单栏中,选择设置(Settings)菜单中的工作网格设置(WorkingGrid)命令,将网格x方向和Y方向的大小分别设置为500和500,将网格的间距设置为25;坐标系与2.5.2节的图2-3所示坐标系一样。
(2)创建关键点坐标,关键点是创建构件和各个构件运动副相连接的位置。
在AD删s菜单栏中,选择工具(Tools)菜单中的列表编辑器(TableEditor),在其中的关键点(Points)界面中依据2.5.3章节所计算得到的数据添加关键点坐标,创建8个关键点,如图4-2所示,取名规则对照图2-3。
图4—2创建关键点(3)创建悬架的运动构件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.5仿真及优化结果分析 根据实际样车,设置车辆及悬架的相关参数:轮胎半径 为317.5mm,轮胎的垂向刚度为219.16N/mm,簧载质量为 635.95kg,质心高度为433.268mm,轴距为2700mm。车辆及 悬架参数的设定如图5所示。
Engineering,Zotye
Auto Holoing Group,Hangzhou
Zhejiang 310018,Chona)
ABSTRACT:In order to improve the kinematics of McPherson suspension,choose McPherson suspension for study target,research the problem of optimization about the wear and improve vehicle stability.Based
≯厶 厂 。菩 多奋
。1r
图3麦弗逊前悬架运动仿真结构
索到全局最优解一o,其基本步骤如图4所示。
3.2设置优化目标函数 在汽车行驶过程中,当路面凹凸不平时,轮胎和车身之 间的相对位置会发生变化,同时车轮定位参数就会相应地变 动。如果车轮定位参数变动过大,会加剧轮胎和转向机构零 件的磨损并降低整车操纵稳定性和乘坐舒适性,因此,设计
0.5。,0),即弱负前束变化,同时变化范围越小越好。 前轮外倾角是指前轮中心平面偏离铅垂轴向外倾斜的 角度。采用麦弗逊悬架的轿车一般采用负的前轮外倾角。 其目的是防止汽车转向行驶、车身发生侧倾时外侧车轮具有 正的侧倾角;夕h倾角的另一个重要作用是产生外倾推力,外 倾推力对前轮能增加其不足转向趋势。但外倾角应选择适 当,因为过大的外倾角会使轮胎产生偏磨损。 主销内倾角是指主销轴线与整车纵向中心平面在竖直 平面内投影的夹角,它有使车轮自动回正的作用。主销内倾 有利于主销内倾偏移距的减小,从而减少转向时需要施加给 方向盘的力,使转向操纵轻便灵活,同时也可减少从转向轮 传到方向盘上的冲击力。61。当前在整车开发过程中,主销内 倾角的范围一般选在7。~13。之间,并希望取较小值。 主销后倾角是主销的轴线相对于竖直平面向后倾斜的 角度。主销后倾角的作用是在中高速行驶中保持汽车直线 行驶的稳定性,适当的加大主销后倾角可以帮助转向轮自动 回正。但后倾角过大,则在低速转向时会导致转向沉重。主 销后倾角过小,会造成直线行驶不稳定,使车轮晃动,加剧前 轮的磨损旧o。
图2麦弗逊悬架结构图 注:l一车身;2一弹簧;3一减振器上体;4一转向节总成;5一 转向横拉杆;6一转向齿条;7一下控制臂;8一车轮;A—J为悬架 几何设计的控制点
值。将抗原和抗体分别对应优化问题的目标函数和可行解, 把抗体和抗原的亲和力视为可行解与目标函数的匹配程度; 用抗体之间的亲和力保证可行解的多样性,通过计算抗体期 望生存率来促进较优抗体的遗传和变异,用记忆细胞单元保 存择优后的可行解来抑制相似可行解的继续产生并加上搜
.....——202....——
如果能提前选定较为合理的悬架空间几何尺寸,如结构 参数,该汽车便可以得到好的运动学、动力学特性。因此如 何使悬架结构参数最优是本文要解决的关键问题。
3麦弗逊悬架结构参数优化
3.1建模 进行优化设计的原车型为某小型轿车,前悬架采用左右 对称的麦弗逊悬架,主要由下摆臂、转向节、减振器、螺旋弹 簧、横拉杆、轮毂、副车架、车身共8个刚体组成。根据其空 间结构可以抽象出如图2所示的前悬架1/2结构模型。 假设除弹簧、减振器、橡胶衬套外的悬架各部件都是刚 体;各运动副之间的摩擦忽略不计。麦弗逊前悬架的硬点坐 标如表1所示,在ADAMS中建立麦弗逊模型如图3所示。
C
一J
J
主销偏移距是前视图中主销轴线接地点与轮胎接地平 面中心点之间的距离。转向时,转向轮围绕主销转动,地面 对轮胎的阻力力矩与主销偏距的大小成正比。所以一般希 望得到比较小的主销偏距,从而减少作用于转向盘上的力和 降低地面对转向系统的冲击。但主销偏移距直接受到主销 内倾角的影响,内倾角越大,主销偏距的值越小。较理想的 主销偏距范围为一10~30mm,希望取较小值。7 J。 2.2难点分析
re—
simulation results and experimental results is less than 10%,proving the feasibility of optimization methods.The
suits show that the front wheel alignment parameters and its range of suspension meet the ideal range after optimized, improve suspension performance,reduce tire wear,and improve vehicle stability.
表2设计变量原始值及优化范围
/
设计点(mm)
坐标轴设计变量原始值优化下限优化上限
3.4免疫算法 免疫算法是将人工免疫的概念及理论和遗传算法相结 合,它不仅保留了遗传算法本身的优良特性,还通过增加免 疫算子来抑制其迭代过程中出现的退化现象,并提高免疫算 法的收敛速度‘8 J。优化的目标是搜索多峰值函数的多个极
第31卷第6期 文章编号:1006—9348(2014)06—0201—06
计算机仿真
2014年6月
汽车麦弗逊悬架性能仿真和优化研究
李翔晟1,陈江英1,高治凌2
(1.中南林业科技大学机电工程学院,湖南长沙410004; 2.众泰汽车控股集团有限公司汽车工程研究院,浙江杭州310018) 摘要:在汽车悬架结构优化设计问题的研究中,为了改善汽车前悬架的运动学特性,以某车型麦弗逊悬架为研究对象,研究 麦弗逊悬架结构参数优化问题,从而减少轮胎磨损,提高汽车稳定性。根据车轮跳动原理和前轮定位参数变化规律,建立麦 弗逊悬架动力学模型,采用免疫算法对麦弗逊悬架的结构参数进行优化,并进行实车验证。仿真结果和试验结果之间的误 差小于10%,验证了优化方法的可行性。研究结果表明,优化后悬架的前轮定位参数及变化范围满足了理想的范围,改善 了悬架性能,减少了轮胎磨损,同时提高了汽车稳定性。 关键词:麦弗逊悬架;定位参数;免疫算法;仿真;优化 中图分类号:TF391.9 文献标识码:B
KEYWORDS:MePherson suspension;Alignment
parameters;Immune algorithm;Simulation;Optimization
析;文献[2—3]使用传统的优化方法对悬架定位参数进行优
1
引言
悬架的几何结构参数直接决定了悬架的运动特性,是影
化。从优化效果来看这些算法并不理想、且优化时间长。因 此本文提出了基于ADAMS的免疫算法来对悬架定位参数进 行优化。免疫算法(Immune Algorithm,IA)是一种新的人工 智能算法,它采用全局优化搜索,在大规模群体搜索能力、并 行性等方面,大大优于传统算法。 本文重点通过对麦弗逊悬架进行运动特性分析,建立悬 架模型,采用ADAMS和免疫算法相结合的方法对悬架关键 结构点的硬点坐标参数进行定位,并使用多目标优化方法对
参数进行优化,并验证其可行性。
一201—
万方数据
在较小的范围内,一般要求在车轮上跳50mm时达到(一
2悬架系统设计原理
悬架是汽车的主要系统之一,由弹性元件、导向机构和 减振器及横向稳定装置等部件组成。它将车体与车轮弹性 地连接起来。其主要任务是传递作用在车轮与车体之间的 一切力和力矩,并且缓和由路面传给车身的冲击载荷,衰减 由此引起的承载系统的振动,以保证车辆稳定行驶。 当汽车在通过不平路面时,路上的颠簸会使车轮垂直于 路面上下运动,力的大小取决于车轮颠簸的程度,路面将力 作用在车轮上,车轮都会产生一个垂直加速度。如果没有一 个居间结构,车轮的垂直能量将直接传递给在相同方向上运 动的车架。此时,车轮会完全丧失与路面的接触,然后在向 下的重力作用下再次撞回路面。完全没有操纵稳定性和乘 坐舒适性可言,而且这些都会对汽车车轮造成影响。因此, 就需要这样一个系统:它能够吸收垂直加速车轮的能量,使 车轮顺着路面上下颠簸的同时车架和车身不受干扰H]。 悬架系统动力学模型如图1所示。
on
structure
parameters
of McPherson suspension,then reduce tire
the principle of wheel hop and the law of front wheel alignment varia—
suspension,use immune
霾型
【
图1悬架系统动力学模型
根据牛顿第二定律,系统的运动方程为: rml互l+k1(石I一戈o)一c(x2一菇1)一k(z2一戈1)=0 m2互2+c(互2一互1)+k(戈2一戈1)=0 (1) 式中:c:悬架减振器的阻尼;k。:轮胎的刚度;m。:非簧载质 量;m::簧载质量;%:悬架弹簧刚度;石。,戈。,z::分别为路面的 激励、非簧载质量及簧载质量的绝对位移;菇.,菇::分别为车身 非簧载部分与簧载部分的垂直速度;互。,互::分别为车身非簧 载部分与簧载部分的垂直加速度¨J。 2.1悬架系统运动特性 在车辆行驶中,由于路面不平或车轮垂直载荷变化,悬 架导向杆系的运动及变形,车轮定位参数随之发生变化,从 而导致轮胎侧偏特性改变;在汽车曲线行驶时悬架上的车身 将发生侧倾,引起汽车侧倾转向和变形转向。因此,悬架系 统运动特性的好坏直接会影plan车辆的操稳性、乘适性以及 轮胎的使用寿命。 前束角是车轮中心线与汽车纵向对称轴线之间的夹角。 它与外倾角共同作用,保持车轮纯滚动和直线行驶,减少轮 胎的异常磨损。为保持行驶的稳定性,应使前束角变化限制
表1前悬架关键硬点坐标(1nnl)
万方数据