自动控制原理课后答案2 西工大版
自控原理习题答案(第2版)

第1章习题答案1-1 解:自动控制系统:被控对象和控制装置的总体;被控对象:要求实现自动控制的机器、设备和生产过程;扰动:除给定值之外,引起被控制量变化的各种外界因素;给定值:作用于控制系统输入端,并作为控制依据的物理量;反馈:将输出量直接或间接的送到输入端,并与之相比较,使系统按其差值进行调节,使偏差减小或消除。
1-2 解:开环控制有洗衣机的洗衣过程,闭环控制有抽水马桶的蓄水控制、电冰箱制冷系统等。
1-3 解:1-4 解:a与d相连,b与c相连即可;系统原理框图如下所示:1-5 解:系统原理框图如下所示:1-6 解:对控制系统的基本要求是稳定性、准确性和快速性:稳定性是系统正常工作的前提条件;准确性反映控制系统的控制精度,要求过渡过程结束后,系统的稳态误差越小越好;快速性是要求系统的响应速度快,过渡过程时间短,超调量小。
1-7 解:该系统的任务是使工作机械(被控对象)的转角θc(被控量)自动跟踪手柄给定角度θr(给定量)的变化。
该系统的工作原理是:检测电位计与给定电位计的电气特性相同,工作机械的转角θc经检测电位计转换成电压u c,手柄给定角度θr经给定电位计转换成给定电压u r,u c与u r接入放大器前端的电桥。
当工作机械转角θc没有跟踪手柄给定角度θr时,u c与u r两者不相等而产生偏差Δu=u r-u c,Δu经过放大器放大,使电动机转动,通过减速器使得负载产生减小偏差的转动。
当检测电位计检测并转换的u c与u r相等,此时Δu=u r-u c=0,电动机不转,工作机械停在当前位置。
其原理框图如下图所示。
1-8 解:谷物湿度控制系统原理框图如下。
该系统的被控量是谷物湿度,给定量是希望的谷物湿度。
谷物加湿后的实时湿度经湿度检测后送到调节器,若与希望的湿度产生偏差,则通过调节器控制给水阀门的开大或关小,以减小两者的偏差。
谷物在入口端的湿度由前馈通道输入到调节器。
这样若入口处谷物湿度较大,则会使得偏差减小,从而减小阀门的开度;若谷物干燥,会增大偏差,从而加大阀门的开度。
《自动控制原理》-卢京潮主编-西北工业大学(清华大学)-第四章习题及答案
根轨迹如图解 4-5 所示。
4-6 直升机静稳定性不好,需要加控制装置改善性能。如图 4-23 所示是加入镇定控制 回路的直升机俯仰控制系统结构图。直升机的动态特性可用传递函数
G0 (s)
=
1(0 s + 0.5) (s + 1)(s − 0.4)2
表示。
70
图 4-23 直升机俯仰控制系统结构图
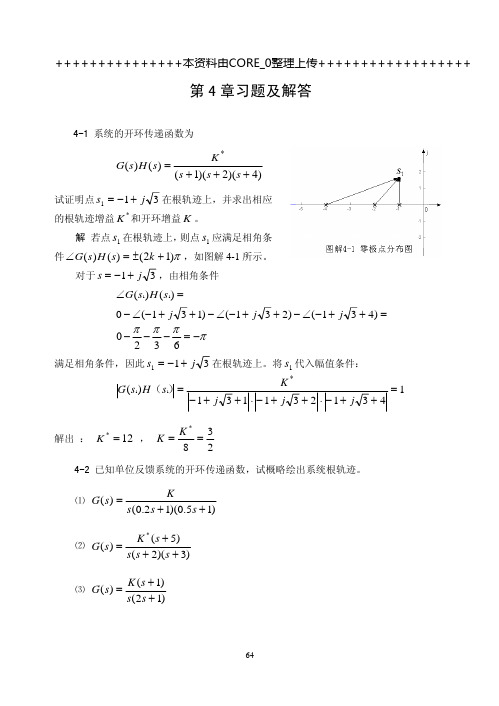
解 若点 s1 在根轨迹上,则点 s1 应满足相角条 件 ∠G(s)H (s) = ±(2k + 1)π ,如图解 4-1 所示。
对于 s = −1 + j 3 ,由相角条件
∠G(s1)H (s1) =
0 − ∠(−1 + j 3 + 1) − ∠(−1 + j 3 + 2) − ∠(−1 + j 3 + 4) = 0 − π − π − π = −π
essn
=
lim
s→0
s
⋅Φ
en
(
s)
⋅
E
(s)
=
lim
s→0
s
⋅
−G0 ⋅ 1+ G0
K1(s +1)
s+9 ⋅ K1(s +1)
s+9
⋅1 s
=
lim
−10K1 ⋅ (s + 0.5)
K1 =1.9
= − 0.868
s→0 (s + 9)(s − 0.4)2 +10K1(s + 0.5)
71
4-7 单位反馈系统的开环传递函数为
(1)画出俯仰控制系统的根轨迹。
(2)当 K1 = 1.9 时,确定对阵风扰动 Td (s) = 1 s 的稳态误差。
《自动控制原理》(卢京潮,西北工业大学)第二章习题及答案
∴
G ( s) =
4 ⎤ ⎡ −1 k (t ) = L−1 [G ( s )] = L−1 ⎢ + = 4e − 2 t − e − t ⎥ s + 1 s + 2 ⎣ ⎦
- 16 -2-10 Nhomakorabea已知系统传递函数
C ( s) 2 &(0) = 0 , , 且初始条件为 c(0) = −1 ,c = 2 R ( s ) s + 3s + 2
(1) (3) 原式 =
−1 1 3 1 1 + − + + 3 2 2( s + 2) 4( s + 2) 8( s + 2) 24s 3( s + 3)
− t 2 − 2 t t − 2 t 3 − 2 t 1 −3t 1 ∴ x(t)= e + e − e + e + 4 4 8 3 24
1 s 1 1 s +1 1 1 1 2 − 2 = − ⋅ + ⋅ (4) 原式 = 2 2 s s + 2 s + 2 2 s 2 ( s + 1) + 1 2 ( s + 1) 2 + 1
化,试推导 id = f (ud ) 的线性化方程。 解 解得 将 i d = 10 −14 (e 将 i (0) = 2.19 × 10 A 代入 i d = 10 −14 (e
−3
ud
u d / 0.026
− 1)
ud 0 = 0.679V
u d / 0.026
− 1) 在( u d 0 , i0 )处展开为泰勒级数,
∴ X (s) = ∴ X ( s) =
e− s 1 e −3s 1 ( s ) − 2 (2 s + ) + 2 s 2 s 2
自动控制原理-第2章习题解答精选全文完整版
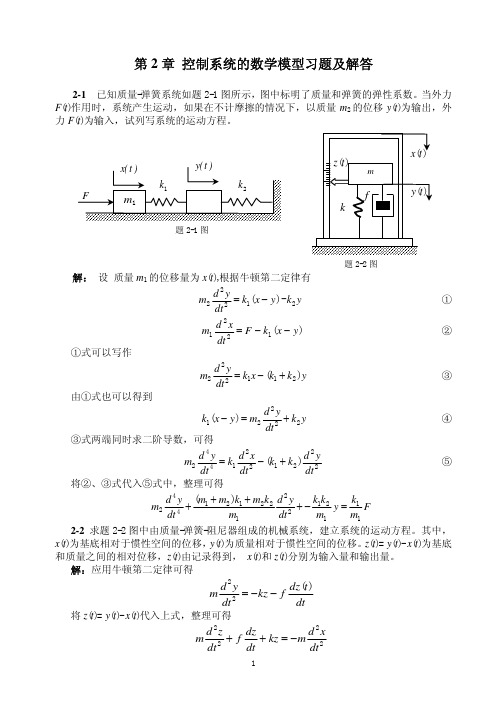
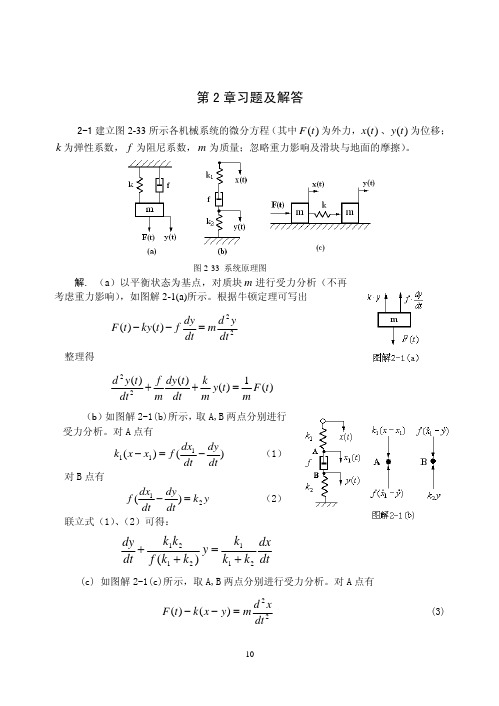
第2章 控制系统的数学模型习题及解答2-1 已知质量-弹簧系统如题2-1图所示,图中标明了质量和弹簧的弹性系数。
当外力F (t )作用时,系统产生运动,如果在不计摩擦的情况下,以质量m 2的位移y (t )为输出,外力F (t )为输入,试列写系统的运动方程。
解: 设 质量m 1的位移量为x (t ),根据牛顿第二定律有y k y x k dt yd m 21222-)(−= ①)(1221y x k F dtxd m −−= ②①式可以写作y k k x k dtyd m )(211222+−= ③由①式也可以得到y k dtyd m y x k 22221)(+=− ④③式两端同时求二阶导数,可得2221221442)(dty d k k dt x d k dt yd m +−= ⑤将②、③式代入⑤式中,整理可得F m k y m k k dty d m k m k m m dt y d m 1112122122121442)(=−++++ 2-2 求题2-2图中由质量-弹簧-阻尼器组成的机械系统,建立系统的运动方程。
其中,x (t )为基底相对于惯性空间的位移,y (t )为质量相对于惯性空间的位移。
z (t )= y (t )- x (t )为基底和质量之间的相对位移,z (t )由记录得到, x (t )和z (t )分别为输入量和输出量。
解:应用牛顿第二定律可得dtt dz f kz dt y d m )(22−−= 将z (t )= y (t )- x (t )代入上式,整理可得2222dtx d m kz dt dz f dt z d m −=++题2-2图题2-1图解:(a )引入中间变量u c (t)表示电容器两端的电压。
根据基尔霍夫电流定律有o c c u R u R dt du C2111=+ 根据基尔霍夫电压定律有o i c u u u −=联立消去中间变量,可得描述输入量u i (t )和输出量u o (t )之间关系的微分方程为i i o o u R dt du C u R R R R dt du C121211+=++ (b )引入回路电流i (t )和电容器两端的电压u c (t)作为中间变量,根据基尔霍夫电压定律有i o u u i R =+1 另有电容元件的元件约束关系方程dtdu Ci c =和i R u u o c 2−=联立求解,消去中间变量可得i i o o u R dt du C u R R R R dt du C121211+=++(c )设电容器C 2两端的电压为u c 2(t),根据基尔霍夫电流定律有dtduC u u R dt u u d C c o i o i 2211)(1)(=−+− ①求导可得22221221)(1)(dtu d C dt u u d R dt u u d C c o i o i =−+− ② 另有输出支路电压方程o c c u u dtdu C R =+2222 等式两边求导有dtdu dt du dt u d C R oc c =+222222 ③将①、②代入③式,整理可得i ii ooo u C R dt du C R C R C R dt u d C R u C R dt du C R C R C R C R dt u d C R 2121221121221212122112121122+++=++++2-4 试求题2-4图所示有源RC 电路的微分方程,其中u i (t )为输入量,u o (t )为输出量。
《自动控制原理》第二版课后习题答案
7
输出驱动 Z 轴直流伺服马达带动切削刀具连同刀具架跟随触针运动,当刀具位置与触针位置 一致时,两者位置偏差为零,Z 轴伺服马达停止。系统中,刀具是被控对象,刀具位置是被 控量,给定量是由模板确定的触针位置。系统方框图如图解 1-9 所示。最终原料被切割加工 成模板的形状。
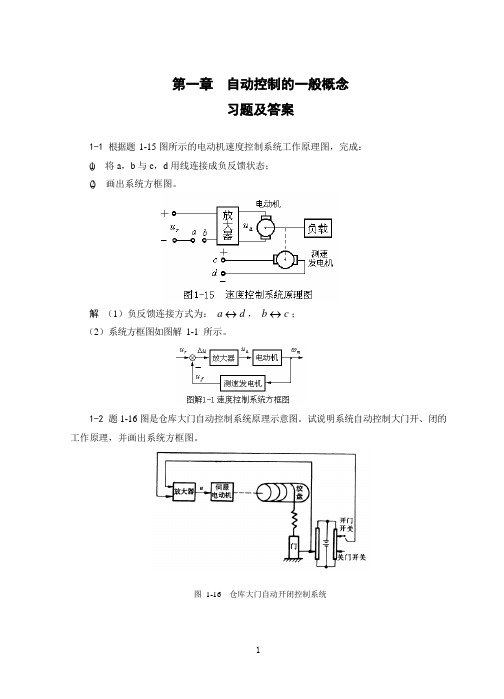
图 1-16 仓库大门自动开闭控制系统
1
解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏 差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大 门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开 启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离 开闭自动控制。系统方框图如图解 1-2 所示。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
图 1-18 导弹发射架方位角控制系统原理图
解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器 P1的滑臂转过一个输入角 i 的瞬间,由于输出轴的转角 o i , 于是出现一个误差角 e i o , 该 误 差 角通过 电 位器 P1、 P2 转 换 成 偏 差 电 压 ue
2e2t单位阶跃输入时有rs依题意4e2t27已知系统传递函数3s2且初始条件为c01dt2ct2e2t28求图230所示各有源网络的传递函数根据运算放大器虚地概念可写出cs29某位置随动系统原理框图如图231所示已知电位器最大工作角度q3303018011根据运算放大器的特性可分别写出两级放大器的放大系数为3010210飞机俯仰角控制系统结构图如图232所示试求闭环传递函数q211已知系统方程组如下
《自动控制原理》卢京潮主编课后习题答案西北工业大学出版社
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
自动控制原理卢京潮主编课后习题答案西北工业大学出版社

自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
自动控制原理第二章到第七章课后习题答案

自动控制原理第二章到第七章课后习题答案第二章2-1试求下图所示电路的微分方程和传递函数。
解:(a )根据电路定律,列写出方程组:001Li R c L R C di L u u dtu R i i dt Ci i i ⋅+==⋅==+⎰消除中间变量可得微分方程:20002i d u du L L C u u dt R dt⋅⋅+⋅+=对上式两边取拉氏变换得:2000()()()()i LL C U s s U s s U s U s R⋅⋅⋅+⋅⋅+= 传递函数为022()1()()1i U s R G s L U s R Ls LCRs s LCs R ===++++ (b )根据电路定律,列写出方程组:12011()i i u i R R idt C u u i R =++-=⎰消除中间变量可得微分方程:121012i R R Ru u idt R R C+=-⎰ 对上式两边取拉氏变换得:2012()(1)()(1)i U s R Cs U s R Cs R Cs +=++传递函数为0212()1()()1i U s R CsG s U s R Cs R Cs+==++2-3求下图所示运算放大器构成的电路的传递函数。
解:(a )由图(a ),利用等效复数阻抗的方法得22111(s)1(s)()1o i R U R Cs Cs G U s R R Cs ++==-=-+(b )由图(b ),利用等效复数阻抗的方法得222121211221211111(s)()1(s)1()1o i R U C s R R C C s R C R C s G U s R C s R C s R C s++++==-=-+2-5试简化下图中各系统结构图,并求传递函数()()C s R s 。
2-6试求下图所示系统的传递函数11()()C s R s ,21()()C s R s ,12()()C s R s 及22()()C s R s 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)
f
(
dx1 dt
−
dy dt
)
=
k2
y
联立式(1)、(2)可得:
(2)
dy + k1k2 y = k1 dx dt f (k1 + k2 ) k1 + k2 dt
(c) 如图解 2-1(c)所示,取 A,B 两点分别进行受力分析。对 A 点有
F (t) − k(x − y) = m d 2 x
+2 CR
dur dt
+
1 C2R2
ur
(c) 由图解 2-2(c)可写出
Ur (s) = R1 [ I1(s) + I2 (s)] + (Ls + R2 )I2 (s) (6)
1 Cs
I1
(s)
=
(Ls
+
R2
)I
2
(s)
(7)
U c (s) = R2 I2 (s)
(8) 图解 2-2(c)
联立式(6)、(7)、(8),消去中间变量 I1 (s) 和 I 2 (s) ,可得:
Uc (s) =
R2
U r (s) R1LCs 2 + (L + R1R2C)s + (R1 + R2 )
微分方程为
duc2 dt 2
+
L
+ R1R2C R1LC
duc dt
+
R1 + R2 R1LC
uc
=
R2 R1 LC
ur
2-3 证明图 2-35 中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的 数学模型)。
1 C1s
+
R1
⋅
1 C1s
R1
+
1 C1s
Uc (s) Ur (s)
=
R1R2C1C2 s 2 + (R1C1 + R2C2 )s + 1 R1R2C1C2 s 2 + (R1C1 + R2C2 + R1C2 )s + 1
比较两系统的传递函数,如果设 R1 = 1 k1 , R2 = 1 k2 , C1 = f1 , C2 = f 2 ,则两系统
的传递函数相同,所以两系统是相似的。
2-4
如图
ud
2-36
所示,二极管是一个非线性元件,其电流 id
和电压 ud
之间的关系为
id = 10−14 (e0.026 − 1) ,假设电路在工作点 u(0) = 2.39V ,i(0) = 2.19 ×10−3 A 处做微小变
化,试推导 id = f (ud ) 的线性化方程。
解 将 i(0) = 2.19 ×10−3 A 代入 id = 10 −14 (eud / 0.026 − 1)
解得
ud 0 = 0.679V
将 id = 10 −14 (eud / 0.026 − 1) 在( ud 0 , i0 )处展开为泰勒级数,
并取一次近似,有
id
= i0
+ Δid
= i0
+ 10−14
变量 y1 ,整理后得
f1 f2 s2 + ( f1 + f2 )s +1
Y (s)
=
k1k 2
k1 k2
X (s)
f1 f2 s2 + ( f1 + f2 + f2 )s +1
k1 k 2
k1 k2 k1
(b) 由图可写出
图解 2-3(a)
整理得
Uc (s) =
U r (s)
R2
+
1 C2s
R2
+
⋅ 1 ⋅ eud 0 / 0.026 0.026
⋅ Δud
图 2-36 二极管电路
Δid
=
10−14
⋅
1 0.026
⋅
eud
0
/
0.026
⋅
Δud
= 0.085⋅ Δud
- 13 -
即在( ud 0 , i0 )附近 id = f (ud ) 的线性化方程为 Δid = 0.085 ⋅ Δud 。
图 2-35 系统原理图
解
(a) 取A、B两点分别进行受力分析,如图解2-2(a)所示。对A点有
k2 (x − y) + f 2 (x& − y&) = f1 ( y& − y&1 )
(1)
- 12 -
对 B 点有
f1 ( y& − y&1 ) = k1 y1
(2)
对式(1)、(2)分别取拉氏变换,消去中间
(3)
dt 2
- 10 -
对 B 点有
k(x − y) = m d 2 y dt 2
联立式(3)、(4)消去中间变量 x 可得:
(4)
d4y dt 4
+
2K m
d2y dt 2
=
K m2
F (t)
图解 2-1(c)
2-2 应用复数阻抗方法求图 2-34 所示各无源网络的传递函数。
(a)
(b)
图 2-34 无源网络
第 2 章习题及解答
2-1 建立图 2-33 所示各机械系统的微分方程(其中 F (t) 为外力,x(t) 、y(t) 为位移; k 为弹性系数, f 为阻尼系数, m 为质量;忽略重力影响及滑块与地面的摩擦)。
图 2-33 系统原理图
解. (a)以平衡状态为基点,对质块 m 进行受力分析(不再
考虑重力影响),如图解 2-1(a)所示。根据牛顿定理可写出
- 11 -
联立式(3)、(4)、(5),消去中间变量 I C (s) 和 I R (s) ,可得: U c (s) = R2C 2 s 2 + 2RCs + 1 U r (s) R2C 2 s 2 + 3RCs + 1
微分方程为
duc2 dt 2
+
3 CR
duc dt
+1 C2R2
uc
=
dur2 dt 2
uc
=
dur dt
+
1 CR1
ur
(b) 由图解 2-2(b)可写出
U
r
(s)
=
R
I
R
(s)
+
[I
R
(s)
+I
c(s)]
1 Cs
Ic (s)
1 Cs
=
RI R (s) −
RI c (s)
Uc
(s)
=
Ic
(s)R
+
[I R
(s)
+
Ic
(s)] 1
Cs
(3) (4) (5)
(c) (1) (2)
图解 2-2(b)
2-5
假设某容器的液位高度 h 与液体流入量 Qr
满足方程 dh dt
+α S
h
=
1 S
Qr ,式中 S
为液位容器的横截面积,α 为常数。若 h 与 Qr 在其工作点 (Qr0 , h0 ) 附近做微量变化,试 导出 Δh 关于 ΔQr 的线性化方程。
整理得
F (t) − ky(t) − f dy = m d 2 y
dt
dt 2
d
2 y(t) dt 2
+
f m
dy(t) dt
+
k m
y(t)
=
1 m
F (t)
(b)如图解 2-1(b)所1(x −
x1) =
f
( dx1 dt
−
dy ) dt
对 B 点有
(a) 应用复数阻抗概念可写出
Ur
(s)
=
R1
1 cs
R1
+
1 cs
I (s)
+Uc
(s)
I (s) = Uc(s) R2
联立式(1)、(2),可解得:
U c (s) = R2 (1 + R1Cs) U r (s) R1 + R2 + R1R2Cs
微分方程为:
duc dt
+
R1 + R2 CR1 R2