台达DMV机器视觉系统
台达DMV产品介绍 - 2

甚至遇到这样的状况……..
像素灰度值分布
瑕疵点位置
请找出框内瑕疵
无法通过阀值找到瑕疵!
26
Delta Confidential
智能瑕疵检测 RDSD (Regional/Directional Strength Detection)
台达智能瑕疵检测原理
Regional Defect Inspector
正常
噪声
过度曝光
可靠检出!
23
Delta Confidential
智能瑕疵检测 RDSD (Regional/Directional Strength Detection)
瑕疵检测一般算法…
像素灰度值分布
瑕疵点分布
Good But Not Enough!
Delta Confidential
阀值
24
台达机器视觉轮廓查找功能特色:
可检出缺损的轮廓
检出!
31
Delta Confidential
超强的轮廓查找功能 Robust Shape Finder
光照不均
检出!
检出!
32
Delta Confidential
超强的轮廓查找功能 Robust Shape Finder
透明物体等干扰
检出!
33
Delta Confidential
智能瑕疵检测 RDSD (Regional/Directional Strength Detection)
当现场状况变成这样…
像素灰度值分布图
阀值
如何判断瑕疵?
25
Delta Confidential
智能瑕疵检测 RDSD (Regional/Directional Strength Detection)
台达通讯模块新品助力智能建筑
台达通讯模块新品助力智能建筑
佚名
【期刊名称】《国内外机电一体化技术》
【年(卷),期】2012(000)005
【摘要】近日,台达集团重拳出击楼宇自动化领域,推出支持BACnetMS/TP (楼宇自动化控制网络通讯协议)的从站通讯模块——DVPSCH52-SL。
楼宇自动化系统是智能建筑不可缺少的一部分,楼宇自动化系统的先进性更是实现绿色建筑的保障。
【总页数】1页(P57-57)
【正文语种】中文
【中图分类】TU855
【相关文献】
1.智能制造台达多系列新品助力“智造”战略 [J], 易欣
2.2018智能建筑展在京开启台达集团收获智能建筑领域两项大奖 [J], ;
3.台达通讯模块新品助力智能建筑 [J], 无
4.台达通讯模块Hodbus高级功能解析 [J], 杜立兴
5.台达新品相继推出——记宁波地区台达新品发布及销售经验交流会 [J], 张丹丹因版权原因,仅展示原文概要,查看原文内容请购买。
台达DMV机器视觉产品介绍

型号
描述
PVS系列机器视觉软件、 PVS100-SAPCI 有无计数功能模块
PVS系列机器视觉软件、 PVS100-S12RI BCR/OCR
PVS系列机器视觉软件、 PVS100-SALDI 标准版
PVS100-SALLI
Delta Confidential
PVS系列机器视觉软件、 全功能版
型号
描述
Delta Confidential
检测功能3 (字符读取OCV)
【字符识别】OCV
➢ 最多可同时读取两行字符 ➢ 字库可通过SD卡共享
19
Delta Confidential
通讯部分
提供RS232/485、以太网络通讯方式出满足正常通讯需求 外,台达DMV还提供如下通讯功能:
➢ PLC-Link功能,可与台达PLC直连(无需编写通讯程序) ➢ 通讯协议自定义,可与多品牌机器人直接通讯(无需PLC中转)
Delta Confidential
DMV2000外观与接口
Delta Confidential
DMV2000主要特点
Delta Confidential
DMV2000主要特点
Delta Confidential
检测速度
DMV2000以30萬灰階的CCD配置1面積功能,檢測時間total time顯系為8.5ms。
PVS100-C01MCGAB 130万像素GiGE型彩色相机
PVS100-C01MGGAB 130万像素GiGE型黑白相机
PVS100-C02MCGAB 200万像素GiGE型彩色相机
PVS100-C02MGGAB 200万像素GiGE型黑白相机
PVS100-C05MCGAB 500万像素GiGE型彩色相机
台达工业组态监控系统使用手册说明书

目錄一、台达工业组态监控系统简介 (1)二、DIAView组态软件安装 (2)2.1 DIAView的安装配置要求 (2)2.2 安装.Net Framework (2)2.3 安装DIAView (5)2.4 安装加密锁驱动程序 (9)2.5 安装OPC Server (11)2.6 卸载DIAView主程序及加密驱动 (14)2.7 安装SQL Server数据库 (16)三、DIAView组态软件开发环境 (24)3.1 常用术语概念 (24)3.2 开发环境介绍 (27)3.2.1 开发环境组成框架 (27)3.2.2 新建工程 (30)3.2.3 管理工程 (33)3.2.4 图形界面开发窗口介绍 (39)3.3 快捷工具栏介绍 (39)3.4 菜单栏介绍 (40)3.4.1文件菜单 (40)3.4.2开始菜单 (43)3.4.3视图菜单 (45)3.5 右键菜单 (46)3.6 快捷键 (47)3.7 工具窗口介绍 (48)3.8 工程窗口介绍 (49)3.9 对象窗口介绍 (50)3.10 属性窗口介绍 (51)3.11 动画窗口介绍 (51)3.12 事件窗口介绍 (52)3.13 扩展属性窗口介绍 (53)四、工程开发基本步骤 (53)五、IO通信 (54)5.1 概述 (54)5.2 通道与设备 (55)5.3 驱动 (55)5.4 故障策略 (57)5.5 IO变量 (58)5.6 通信状态 (68)5.7 通信控制 (68)5.8 PLC (72)5.8.1 莫迪康 (72)5.8.1.1 Modbus Tcp (73)5.8.1.2 Modbus Serial RTU (74)5.8.1.3 Modbus Serial ASCII (74)5.8.2 欧姆龙 (75)5.8.2.1 FINS TCP (75)5.8.2.2 FINS ASCII (80)5.8.2.3 HostLink ASCII (83)5.8.3 台达 (85)5.8.3.1 Delta AS300 TCP (87)5.8.3.2 Delta AS300 RTU & ASCII (87)5.8.3.3 AH Modbus TCP (87)5.8.3.4 AH Modbus Serial RTU & ASCII (87)5.8.3.5 DVP Modbus TCP (87)5.8.3.6 DVP Modbus Serial RTU & ASCII (90)5.8.3.7 DIALink (94)5.8.3.8 DIALinkCNC (98)5.8.4三菱 (101)5.8.4.1 Mitsubishi FX Serial (101)5.8.4.2 Mitsubishi ProFX Serial (106)5.8.4.3 Mitsubishi Q Serial (110)5.8.4.4 Mitsubishi Q EnterNet (114)5.8.4.5 Mitsubishi FX EnterNet (118)5.8.5 西门子 (122)5.8.5.1 S7300 TCP (122)5.8.5.2 S71200 TCP (125)5.8.5.3 S7300 MPI (130)5.8.5.4 S7200 TCP (135)5.8.5.5 S7200 PPI (139)5.8.5.6 S7200 Smart TCP (144)5.8.6 台达电表 (147)5.8.6.1 DPM-C530 Serial (147)5.8.6.2 DPM-C530 Enternet (150)5.8.7 罗克韦尔 (153)5.8.7.1 Rockwell Controllogix Enternet (153)5.9 OPC (156)5.9.1 OPC (156)5.9.2 OPCUA (161)5.10 模拟设备 (168)5.10.1 模拟设备 (168)六、变量词典 (172)6.1 概述 (172)6.2 变量组 (172)6.3 变量 (174)6.4 变量引用浏览 (176)6.5 变量替换 (178)6.5 变量统计 (181)6.7 变量浏览器 (182)6.8 表达式 (184)七、图形界面开发 (187)7.1 概述 (187)7.2 窗口 (187)7.2.1 新建窗口 (187)7.2.2 窗口操作 (188)7.2.3 新建窗口组 (192)7.2.4窗口组操作 (193)7.3 窗口基本属性 (195)7.4 图形通用属性 (196)7.5 基本图形的属性与绘制 (197)7.5.1 直线的绘制 (197)7.5.2 矩形的绘制 (198)7.5.3 圆角矩形的绘制 (199)7.5.4 椭圆的绘制 (200)7.5.5 折线的绘制 (200)7.5.6 多边形的绘制 (201)7.5.7 贝塞尔曲线的绘制 (203)7.5.8 闭合曲线的绘制 (204)7.5.9 弧线的绘制 (205)7.5.10 弓形的绘制 (206)7.5.11 扇形的绘制 (207)7.5.12 管道的绘制 (209)7.5.13 文本的绘制 (210)7.6 窗口控件的属性与绘制 (211)7.6.1 按钮的绘制 (211)7.6.2 复选框的绘制 (212)7.6.3 组合框的绘制 (213)7.6.4 标签的绘制 (215)7.6.5 文本框的绘制 (216)7.6.6 密码框的绘制 (217)7.6.7 时间日历的绘制 (218)7.6.8 日期的绘制 (219)7.6.9 月历的绘制 (220)7.6.10 图像的绘制 (221)7.6.11 GIF图像的绘制 (222)7.6.12 数码管 (223)7.6.13 弧形标尺 (224)7.7 扩展控件的属性与绘制 (226)7.7.1 实时曲线的绘制 (226)7.7.2 历史曲线的绘制 (231)7.7.3 XY曲线的绘制 (237)7.7.4 自定义曲线的绘制 (246)7.7.5 饼图的绘制 (250)7.7.6 饼图3D的绘制 (253)7.7.7 柱状图的绘制 (255)7.7.8 历史柱状图的绘制 (260)7.7.9 记录框的绘制 (266)7.7.10 报警窗的绘制 (268)7.7.11 报表概述 (274)7.7.11.1 报表模板设计 (274)7.7.11.2 报表绘制 (280)7.7.12 配方浏览器的绘制 (282)7.7.13 标尺的绘制 (287)7.7.14 仪表板的绘制 (289)7.7.15 Web浏览器的绘制 (291)7.8 图形操作 (292)7.8.1 概述 (292)7.8.2 旋转 (293)7.8.3 拉伸 (294)7.8.4 对齐 (295)7.8.5 层次 (299)7.8.6 尺寸 (301)7.8.7 组合 (303)7.8.8 扭曲 (304)7.8.9 缩放 (305)7.8.10 偏移 (307)7.9 组合图形扩展属性 (309)八、图库 (311)8.1 概述 (311)8.2 图形库的使用 (312)8.3 图形库的扩充 (314)8.4 图形库导出为图片 (315)九、动画 (316)9.1 概述 (316)9.2 旋转动画 (316)9.3 外观动画 (328)9.4 填充动画 (332)9.5 缩放动画 (339)9.6 移动动画 (347)9.7 可见性动画 (354)9.8 流动动画 (360)9.9 数值显示动画 (366)9.10 倾斜动画 (378)9.11 文本动画 (385)十、事件 (388)10.1 概述 (388)10.2 左键事件 (388)10.3 右键事件 (391)10.4 鼠标事件 (394)10.5 窗体事件 (397)10.6 滑动输入事件 (401)10.7 值输入事件 (403)10.8 旋转输入事件 (413)10.9 画面程序事件 (416)10.10 控件事件 (419)十一、报警 (422)11.1 概述 (422)11.2 报警组 (422)11.3 报警变量 (425)11.4 报警窗 (431)11.5 配置 (431)十二、用户权限 (444)12.1 概述 (444)12.2 安全区 (444)12.3 用户 (446)十三、操作变量 (451)十四、历史变量 (453)14.1 概述 (453)14.2 设置变量记录(兼容) (453)14.3 设置变量记录 (458)14.4 查看变量记录 (462)14.5 设置变量群组记录 (465)十五、配方 (467)15.1 概述 (467)15.2 配方的配置 (468)15.3 配方浏览器 (469)十六、用户程序 (472)16.1 概述 (472)16.2 条件程序 (473)16.3 时间程序 (475)16.4 全局函数 (478)16.4.1 概述 (478)16.4.2 设置全局函数 (478)16.4.3 函数添加与使用 (483)16.4.4 函数引用浏览与导入导出 (486)十七、数据库访问 (487)17.1 概述 (487)17.2 数据库访问配置 (488)17.3 数据库访问 (490)十八、全球化 (491)18.1 概述 (491)18.2 多语言配置 (492)18.3 多语言引用浏览 (493)18.4 字符串 (494)18.5 图片 (500)18.6 声音 (506)18.7 系统多语言 (507)18.8 运行时切换语言 (508)十九、工程配置 (509)19.1 概述 (509)19.2 工程配置 (509)二十、脚本 (512)20.1 概述 (512)20.2 脚本编辑器功能介绍 (513)20.3 脚本语法与函数 (520)20.3.1 画面 (520)20.3.1.1 基本图形 (520)20.3.1.2 窗口控件 (588)20.3.1.3 扩展控件 (669)20.3.1.4 命令 (860)20.3.2 IO通信 (870)20.3.3 变量 (892)20.3.4 报表 (921)20.3.5 报警 (928)20.3.6 用户及权限 (954)20.3.7 历史变量 (963)20.3.8 后台脚本 (970)20.3.9 配方 (980)20.3.10 数据库访问 (993)20.3.11 颜色 (1012)20.3.12 全球化 (1016)二十一、DIAView组态软件运行环境 (1018)21.1 概述 (1018)21.2 运行环境介绍 (1019)一、台达工业组态监控系统简介1.背景随着工业及社会经济的发展,以计算机、高速网络为基础的信息技术日趋成熟与先进,应用范围涉及工业制造、进出口贸易、交通、电力、石油、化工、冶金以及人们日常生活、文化娱乐等方方面面,信息技术也逐步向自动化、智慧化发展,推进生产力的革命及人们生活水平的提高。
电动汽车充电操作机器人的视觉系统设计
此,新能源汽车充电方式的无人化、智能化便有了很 大的研究价值'充电机器人自动化充电方式的 实现需要完成以下工作:1)机器人通过导航移动 到待充电电动汽车的充电接口旁;2)视觉系统识 别定位充电接口 ;3)机器人控制充电枪插入充电
收稿日期:2020-09-21 基金项目:国家自然科学基金-浙江省自然科学基金联合基金两化融合项目(U1709213);国家自然科学基金面上项目(61374103) 作者简介:徐建明(1970—),男,江西吉安人,教授,研究方向为运动控制、机器人控制及其应用等,E-mail: xujm@zjut. edu. cn。
作为一种二分类模型,对于小样本、非线性模式识别 拥很大的优势。针对电动汽车快充、慢充插座的内 部结构特征差异,采用基于支持向量机的方法进行 识别。MVTec公司的Halcon视觉平台提供了 SVM 类 的 算 法 , 用 该 SVM 类 , 电 动汽车快充、慢充两个插座设置合适的分类器参数, 进行分类器训练,得到分类器模型,将该分类器模型 作用于快充、慢充插座的测试样本,达到预期的识别 率便可以得到一个合适的SVM模型。具体的模型 训练流程如图4所示。
人的双目视觉系统。首先,采用支持向量机(SVM)和线性可变形模板匹配相结合的方法识别快充 和慢充插座、定位插座中心充电孔,结合双目立体匹配,获取中心充电孔的三维坐标;其次,建立超
出机器人的工作范围和充电孔角度识别偏差过大情况下的异常处理机制;最后,在Halcon视觉平
台编写视觉算法进行实验验证,结果表明:该视觉系统能够有效区分快充和慢充插座、定位目标插
2视觉系统识别定位方案设计
2=控制算法流程设计 要实现准确识别目标充电插座、定位充电孔的
功能,就必须确立一套完善的目标识别定位方案,通 过对视觉系统的功能需求分析,笔者设计了基于支 持向量机和线性可变形模板匹配的充电插座识别定 位系统,包括图像预处理、充电插座分类和充电孔匹 配定位,主要操作有图像灰度化、图像滤波、图像分 割、特征提取、SVM分类器设计及参数选择、线性可 变形模板创建及匹配定位等。目标充电插座识别和 充电孔定位算法流程如图3所示。
台达 多镜头机器视觉系统DMV2000系列
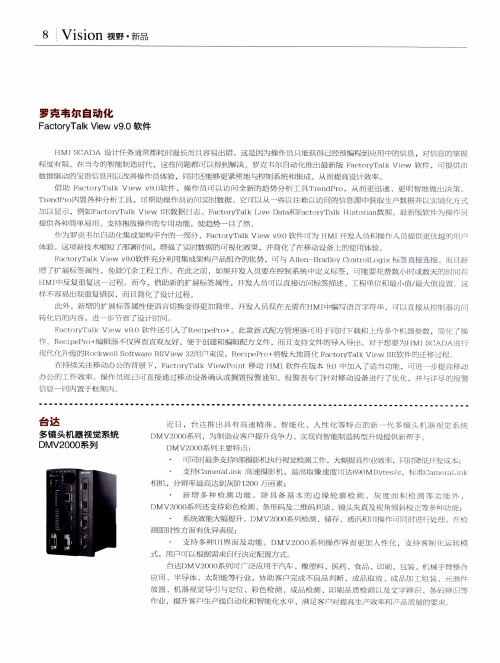
可同时最 多支持8 部摄影机 执行视 觉检测工 作 ,大幅 提r 岛作 业效牢 ,
『 、 』 降低 开发喊 _ 爪; 准C a me r a [ i n k
・
支持 Ca me r a L i nk高 速摄 影 机 ,最 高取 像 速度 可达 ( 3 9 0M B y t e s / s,
作 Re e i pe P r o + 编 辑器 不 仅界 面直观 友 好 ,便于 创建 和编 辑配 方 文件 ,而 且支 持文 件 的导入 导 出。 埘于想 耍为 I t MI S CADA进 , 彳 现 代 化升级 的Ro c k we l l S o t t wa r e RS Vi e w 3 2 用户 来说 ,Re c i p e P r ( 1 + 将 极大地 简 化 F a c t o r y Ta l k Vi e w S E软件 的迁 侈过 在持 续关 注 侈动办 公 的背 景下 ,F a c t o r y T a l k Vi e wP o i n t移动 HMI软件 在版 本 9 . 0 中加 入 了适 当功能 .可进 一步提 高侈动
近 日 ,台 达 推 出 具 有 高 速 精 准 、智 能 化 、人 性 化 等 特 点 的 新 一 代 多 镜 机 器 观 觉 系 统 DMv2 O O O 系 列 。为制 造业 客户 提升 竞争 力 、实现 向 智能制 造转 型升 级提 供囊 斤 帮手。 DMV2 0 0 0 系列 主 耍特 点 :
8 Vi s i o n 视野. 新品
罗 克 韦 尔 自动 化
F a c t o r y T a l k V i e w v 9 . 0软件
HM I S CADA 设 计任 务通 常都 耗时 漫长 而 且容 易出锚 ,这是 冈为 操作 员 只能获 得 已经预 编程 到 应用 中的 息 ,对 信息 的掌 握
台达机器人及视觉在电动剃须刀静片钝化的应用崔豪健

台达机器人及视觉在电动剃须刀静片钝化的应用崔豪健发布时间:2023-05-11T10:43:01.650Z 来源:《中国电业与能源》2023年5期作者:崔豪健[导读] 本文主要介绍台达台达产品在电动剃须刀静片钝化的应用。
在电动剃须刀刀头上有很多配件组成,其中包括刀网、刀片、动片、静片、壳体等部分组成,这些配件都需要人工进行分拣、打磨、钝化、装配、装盘等工序进行加工,而此前客户主要为人工完成,自动化程度低。
中达电通股份有限公司杭州分公司摘要:本文主要介绍台达台达产品在电动剃须刀静片钝化的应用。
在电动剃须刀刀头上有很多配件组成,其中包括刀网、刀片、动片、静片、壳体等部分组成,这些配件都需要人工进行分拣、打磨、钝化、装配、装盘等工序进行加工,而此前客户主要为人工完成,自动化程度低。
关键词:机器人;SCARA;VGR;视觉系统前言电动剃须刀静片钝化设备使用台达两套4轴Scara机械手、3套6轴多关节机器人、VGR机器视觉、工控机、镜头、相机、光源、光源控制器、开关电源、交换机、DOP100系列触摸屏等。
属于全套台达系统整合解决方案,多种产品高度集成。
产品之间通过以太网进行Modbus TCP一网到底通讯,实现高速、便捷的信息交互。
该设备大大降低人力投入、降低人工成本、提升产品产能、质量稳定性及品控。
是机器人换人,解决繁重、高重复性、高危险工作的解决方案。
为客户带来更好的良品率,减少对人工的依赖,特别是当今招工难的问题得以解决,也为小家电行业产业自动化升级更进一步。
一、案例平台1、硬件平台HMI DOP-110WSIPC PVS-100-A04GI5/AAS-PS02电源模块相机PVS100-C05MGGAB镜头PVS100-C05MGGAB光源DMV-LRDW038000JDMV-P4524DAJ 光源控制器DMV-VGR视觉软件4轴DRS40L3SO1BN002机器人DRV A1L7A6113N6轴机器人PVS100-CA05GB相机线缆DVS-005I00交换机二、设备工艺要求电动剃须刀刀头按结构可分为旋转式和往复式结构。
台达机器视觉系统DMV1000系列

►►耐衝擊:最大 300 m/s、3 軸 6 方向、各 3 次 ►►操作環境溫度:0 ℃ ~ +50 ℃ ►►存放環境溫度:-20 ℃ ~ +65 ℃ ►►操作環境濕度:35% ~ 65% RH ( 無結露 ) ►►操作高度:低於 2000 公尺
►►型式:IEEE1394a 數位灰階攝影機 ►►畫素:640 x 480 (30 萬畫素 ) / 80 fps、1024 x 768 (80 萬畫素 ) / 30 fps ►►數量:最多 2 台 ►►快門速度:0.05 ms ~ 1 s 及自訂 ( 共 16 種 ) ►►接口:C mount
32 COMCCD2 TRIGCCD 2 specific COM
33 COMIN2 50-pin 輸入共通接點
34 COMIN2 50-pin 輸入共通接點
35 ACK
並列輸出交握旗標
36 RESET
系統重置
37 FCH
功能選擇啟動觸發
38 FNC1
功能選擇 1
39 FNC2
功能選擇 2
40 FNC3
►►設定:共 6 種
►►種類:二值化、擴張、侵蝕、平均、中值、銳化、Laplacian、SobelX、SobelY、Sobel、 Prewitt、Roberts、差分、共 13 種
►►全部執行、從不執行、條件執行
►►數量:32 組
►►四則運算:加、減、乘、除
►►函數 (36 types):MAX、 MIN、 AVG、 ABS、 MOD、 POW、 SQR、 SQRT、 INT、 ROUND、 SIN、 COS、 TAN、 ASIN、 ACOS、 ATAN、 DIST、 ISECT_X、ISECT_Y、 LINE_DIST、 LINE_DIST_X、 LINE_DIST_Y、 ANGLE、 LINE_ANGLE、 D_LINE_ANGLE、 CIRCLE_X、 CIRCLE_Y、 CIRCLE_R、PANEL_ANGLE、 PANEL_DIST、 NOT、 RAD、 DEG、 PI、 LE、 EQ