履带起重机起升液压系统的改进
履带起重机发动机与液压泵的匹配解读
作者简介 :王欣 (1972- , 女 , 副教授 . E 2mail :wangxbd21@163. com.履带起重机发动机与液压泵的匹配王欣 1, 刘宇 1, 蔡福海 1, 薛林 2(1. 大连理工大学机械工程学院 , 辽宁大连 116024; 2. 大连市特种设备监督所 , 辽宁大连 116021摘要 :针对履带起重机存在的功率匹配问题 , 分析其产生的原因 . 基于发动机不同的控制方式 , 给出相应的液压泵的控制策略 . 提出了一些解决履带起重机发动机 -泵功率匹配问题的新方法 .关键词 :履带起重机 ; 发动机 ; 液压泵 ; 匹配中图分类号 :TH 213文献标识码 :A 文章编号 :1672-5581(2007 02-0182-04Matching between engines and hydraulic cranesW A N G Xi n 1, L IU 11X E L i n 2(1. School of Mechanical of of Technology , Dalian 116024,China ;2. and Institute ,Dalian 116021,ChinaAbstract :In this power matching problem is proposed and analyzed for crawler cranes. Based on diverse control modes of engines , corresponding control strategies of hydraulic pumps are presented. To re 2solve the non 2matching problem between engines and hydraulic pumps , some novel methods are postulated in this paper.Key words :crawler crane ; engine ; hydraulic pump ; matching随着生产规模的扩大 , 自动化程度的提高 , 履带起重机作为重要的搬运设备 , 在现代化生产过程中广泛应用于石油化工、桥梁建设、建筑安装、港口物流、市政工程等各个领域 , 发挥着巨大的作用 .然而 , 履带起重机在实际使用过程中 , 常常出现柴油发动机与液压系统功率不匹配现象 , 具体表现在 :①行走与起升速度达不到预期值 ; ②发动机在有些工况下功率利用率较低 , 燃油消耗较快 . 本文针对上述实际问题 , 在履带起重机设计阶段提出相应方案 , 最大程度地实现发动机与液压泵的功率匹配 , 达到提高作业效率及节能的目的 .1问题产生的原因在发动机外特性曲线上 , 可以找到一些点 , 在这些点上 , 发动机的各项性能综合指标要优于其他点 , 这些点叫做最佳工作点 , 与之对应的发动机转速叫做最佳工作点转速 . 通常的发动机控制策略就是力争使发动机工作在最佳工作点上 [1].履带起重机的动力传动系统是一个发动机 -液压系统 -载荷的负载驱动系统 , 其中发动机 -泵的功率匹配是对整个系统功率匹配影响最大的因素 .理想的能量转换不计能量损失 , 则泵的功率 P P 等于发动机的输出功率 P E为 P E =P P第 5卷第 2期2007年 4月中国工程机械学报 CHINESE JOURNAL OF CONSTRUCTION MACHINERY Vol. 5No. 2 Apr. 2007而泵的功率 P P 等于负荷需要的功率 P L 为P L =P P所以 , 当负载发生变化时 , 泵的功率变化 , 则发动机的输出功率也随之变化 , 这使得发动机不能稳定工作在特性曲线上最佳工作点的位置 , 从而出现功率的不合理匹配 .2发动机与液压泵匹配的实现发动机与液压传动装置的匹配的实质是提出最为合理的控制方法 , 从而使发动机的转速、输出扭矩能适应外部负荷的变化 , 保持发动机在最佳工作点附近工作 , 有较高的功率利用和较低的燃油消耗率 .目前柴油发动机适合于液压传动的控制形式有 :①发动机恒功率控制 , ②发动机变功率控制 . 工程机械中为了更好地适应外负荷的变化 , 保证作业的高效性和经济性 , 一般将两种控制方式结合使用 .2. 1发动机恒功率控制与泵功率匹配的实现2. 1. 1实现的原理由功率 P =9549, n 为转速 , 得发动机输出扭矩 T E P :T E 9因此 , 在发动机转速 n , P T E 的决定性因素 . 若通过设定泵的输出功率恒定 , , 即当负载变化时 , 通过调节泵的 , , 实现泵与发动机之间的功率匹配 . 从而得出结论 :, 欲实现泵与发动机匹配 , 则要求泵具有恒功率特性 [2].2. 1. 2泵的恒功率控制所谓泵的恒功率控制就是通过机电液等控制机构之间的相互配合实现泵的流量Q 和出口压力 p 存在反比例变化关系 :Q p =const如图 1所示为一条双曲线 , 由P p =600ηt 得P P =const图 1恒功率控制曲线 Fig. 1 Constant pow er control curve 图 2所示为一典型的泵恒功率控制原理图 [3]. 其中 ,M 为工作油口测压口 ,A 为工作油口 , G 为定位压力口 ,S 为吸油口 ,M1为斜盘控制油缸测压口 ,R 为放气口 , T1, T2为壳体泄油口 . 泵输出的压力经过节流口进入斜盘控制油缸 2, 同时进入计量活塞中推动计量活塞带动摆杆 4转动 , 压缩功率设定弹簧 5, 进而调节伺服阀 6的开口 , 使得液压油液进入斜盘控制缸的压力变化 . 两斜盘控制缸的合力作用于泵的斜盘上 , 从而调节泵的斜盘摆角控制泵的输出流量 . 计量活塞一端与斜盘控制缸 2的活塞杆连接 ,另一端通过滑轮与摆杆 4接触 , 当压力变化时 , 计量活塞对摆杆的作用力和力臂都会相应改变 , 进而保证泵的流量与输出压力成双曲线关系变化 , 这就实现了泵的恒功率控制 .2. 2发动机变功率控制与泵功率匹配的实现2. 2. 1实现原理 381第 2期王欣 , 等 :履带起重机发动机与液压泵的匹配1,2. 斜盘控制油缸 ; 3. 计量活塞 4. ; 5. 功率设定弹簧 ; 6. 伺服阀图 2constant pow er control在有些工况下 , 发动机的恒功率控制不能满足作业高效性和经济性 , 具体有两个方面 :一方面 , 为了追求作业速度 , 提高工作效率 , 必须人为地提高发动机转速 (如靠提高发动机转速来提高起升、变幅、回转、行走的速度 . 此时泵的输出功率也相应提高 . 恒功率控制无法跟随发动机输出功率变化 .另一方面 , 在低功率作业的情况下 , 泵的输出功率远低于发动机在该转速下输出的最大功率 , 发动机的功率利用率很低 (如在执行穿绳、穿销等小功率动作时 , 此时操作的经济性很差 .可采用联合控制方式实现发动机 -泵的功率匹配控制 . 其框图如图 3所示 .针对第一种情况联合控制方式将检测到的发动机的输出功率 (检测发动机的转速、扭矩以及信号的形式输入计算机并计算出与泵的输出功率的偏差 , 根据偏差 , 调整泵的功率设定值 , 使泵的吸收功率始终追踪发动机的输出功率 , 实现功率匹配 .图 3发动机的变功率控制与泵功率匹配的实现框图 Fig. 3 E ngine variable control and pump pow er m atching frame 针对第二种情况联合控制方式 , 通过检测泵的输出功率 (检测泵的压力、 , 功率的偏差 , 转速 , 整 , 并调整泵的功率设定值 , 实现发动机和泵的功率匹配 .这里需要指出 :由负载部分传递的泵的功率调节信号往往是由负载变化 , 进而导致液压系统工作压力变化引起的 ; 由发动机部分传递的功率调节信号往往是由发动机转速变化 , 进而导致液压系统流量变化引起的 .以上两种情况 , 实现功率匹配控制都要求泵的恒功率控制的设定功率可变 , 即要求恒功率控制存在一个优先级更高的功率调节控制 .2. 2. 2带功率调节控制的泵的恒功率控制图 4功率调节控制 Fig. 4 Pow er regulating control在一般的恒功率控制过程中变量泵的恒功率调节只能设定一个或几个固定的值 , 通过功率设定弹簧来实现 , 精度不高 . 而在使用功率调节电磁阀之后 , 其功率值就可以通过改变电磁阀控制信号的电流大小来实现在功率可调范围内波动 , 如图 4所示 . 其中 ,Z 为恒功率设定油口 .功率调节控制的原理就是在原恒功率控制 (图 2 的基础上加上了功率调节油缸 (如图 5所示 [3], 由功率调节油缸、摆杆、功率设定弹簧及伺服阀的复位弹簧共同作用 , 决定伺服阀的开口大小 , 调节泵的斜盘摆角 , 进而改变泵的输出流量 . 功率调节油缸的作用力可由控制 Z 口压力的比例电磁阀的电流控制信号来调整 . 这就组成了变量泵的功率设定调节器 .工作过程中 , 可通过调节变量泵上功率设定调节器对泵进行功率调节 . 如图 4, 在轻载工况下 , 泵的功率曲线设定在曲线 1位置 , 如果负载所需功率增大 , 则需提高泵的输出功 481中国工程机械学报第 5卷of pow er regulating control 率 , 通过泵控调节器 , 调整泵的排量增大 , 则其功率曲线升高到曲线 2位置 . 但恒功率控制是以牺牲执行机构的动作速度为代价的 , 这可以由提高发动机的转速来加以补偿 .当负载减小时 , 控制器又调节功率曲线向曲线 1方向移动 , 这样就避免了因系统需要流量小于泵的输出流量而产生功率损失 .工程机械中发动机与液压系统的功率匹配主要是发动机、液压泵、载荷三者之间的功率匹配 , 采用带功率调节控制的变量泵恒功率控制系统 , 实现三者之间在通常工况下的功率匹配 . 在特殊工况下 , 当需要增加发动机转速来提高机构运行速度时 , 通过检测发动机输出功率来调节泵的输出功率 , 可由简单的 PID 控制实现 . 在轻负载作业时 ,泵的输出功率远低于发动机在该转速下输出的最大功率 ,即系统需要流量远小于泵的输出流量 , 通过检测泵的输出功率来调节发动机的转速和泵的恒功率调定值 , 也可由简单的 PID 控制实现 . 在特殊工况下的这两个方面 , 也可以作为两种单独的模式分别进行控制 . 3结语, 针对工程机械中常用的发动机控制方式 , 提出了与 :(1 发动机处于恒功率控制时 , 控制液压泵的恒功率来保证发动机与液压泵的功率匹配 .(2 发动机处于变功率控制时 , 分两种情况检测发动机和液压泵的功率匹配情况 , 由计算机处理后控制发动机转速及液压泵的功率调节系统 , 使泵的输出功率追随发动机的输出功率 , 实现功率的合理利用 . 参考文献 :[1]沃尔沃公司 . 沃尔沃公司发动机样本 [R].上海 :沃尔沃公司 ,2003.Volvo Corporation. Engine samples of volvo corporation[R].Shanghai :Volvo Corporation , 2003.[2]欧阳联格 . 全液压推土机传动系统与发动机匹配 [J].工程机械 ,2004(11 :44-47.OU YAN G Liange. Match between drive line and engine on fully hydraulic bulldozers [J].Construction Machinery and Equipment ,2004(11 :44-47.[3]博世力士乐公司 . 行走机械用液压及电子控制元件 [R].北京 :博世力士乐公司 ,2004.Rexroth Bosch Group. Hydraulic and electron control elements for mobile machinery[R].Beijing :Rexroth Bosch Group , 2004. 581第 2期王欣 , 等 :履带起重机发动机与液压泵的匹配。
2024年履带起重机安全卸荷失灵故障的解决办法(三篇)
2024年履带起重机安全卸荷失灵故障的解决办法履带起重机常采用先导控制液压系统,操作舒适,微动性好。
该系统对可能出现的主、副起升卷扬超载或桁架臂变幅过仰等危险工况,均采用了先导控制油路安全卸荷的方式加以防范,原理如图1所示。
即通过力矩限制器、超载卸荷电磁阀和逻辑阀或限位开关、过仰卸荷电磁阀和逻辑阀的联合作用,确保实现发生过载或过仰误操作时能够可靠地做到安全卸荷,杜绝发生事故。
一台履带起重机在试制过程中进行安全实验时发现:在进行超载或过仰作业时,操纵室内面板上的指示灯虽然已经报警,但各项操作却仍然可以继续进行,说明其安全保护装置的安全卸荷失灵。
对此问题进行分析,电气系统或液压系统出现故障,都能导致安全卸荷失灵。
于是,从电路和液路两个方面进行检查。
对电路检测的目的是排查力矩限制器和限位开关在提供给面板指示灯报警信号的同时是否也能将电信号传递给了卸荷电磁阀,若能,将接通卸荷回路,实现安全卸荷,否则,安全卸荷将失灵。
根据原理图,在力矩限制器没有对卸荷电磁阀提供电信号之前,卸荷电磁阀为常断电状态,即卸荷回路断开,而一旦力矩限制器对其提供电信号,卸荷电磁阀则通电、实现换向、接通卸荷回路。
为此,将逻辑阀一侧的管路(T1口)断开,然后进行操作时发现当力矩限制器不发出指令时,超载卸荷电磁阀Y1无电,电磁阀也没有换向,无压力油流出,而当该机进入到超载工况时,该阀得电立刻有液压油从管路中流出。
这说明力矩限制器发出逻辑指令的程序正常,且卸荷电磁阀的工作也正常。
同理,对控制过仰卸荷的限位开关和过仰卸荷电磁阀Y2进行检查时,工作也正常,因此,排除了电路有故障的可能性。
检查完电路后再检查液路,首先排查布管,没有出现错误,最后将注意力集中到了逻辑阀上,怀疑逻辑阀内单向阀的弹簧较硬或阀内的通径较小,使卸荷油路背压较大,导致卸荷油路不畅通,卸荷困难。
于是在报警的状态下测量动作对应的an或bn口的压力,发现压力为1MPa左右,而主阀只需要约0.6MPa的先导压力即可开启,证明了怀疑正确,正是由于逻辑阀内的背压较大,才造成了卸荷困难。
船用起重机液压系统的改进
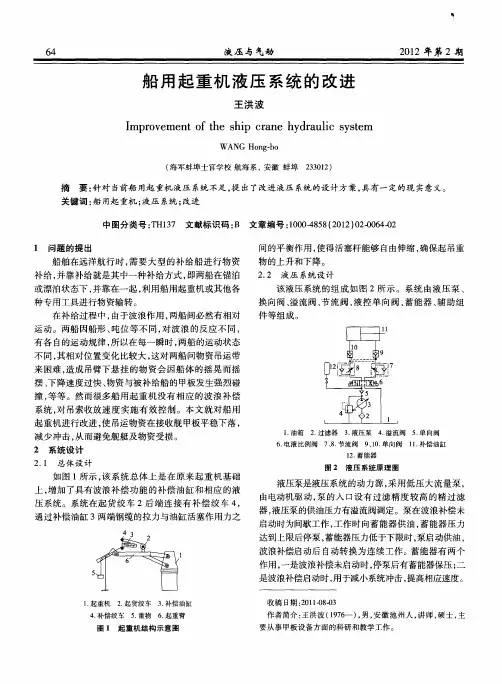
作用 , 一是波浪补偿未启动时, 停泵后有蓄能器保压 ; 二 是波浪补偿启 动时 , 用于减小 系统冲击 , 提高相应速度 。
1 起重机 . 2 起货绞车 . 5 重物 . 3 补偿油缸 . 6 起重臂 .
收稿 日期 :0 1 8 2 1 _ 3 o
关键 词 : 煤矿 ; 化 液泵站 ; 压 系统 乳 液 中图分 类号 :H1 7 文 献标识 码 : 文章 编 号 :0 0 5 (0 2 0 -0 5 T 3 B 1 0 48 8 2 1 )20 6  ̄2
1 引 言
乳 化液 泵 站是采 煤 工作 面支 护设备 及 推移装 置 的 动 力源 , 工作 的好 坏直 接影 响着 液压 支架 的使 用 , 它 对
研究 。
乳 化液 泵 站主要 由泵 、 化液 箱 及 其 附属 结 构 组 乳 成 。乳 化液 泵 站一般 由 2台泵 组 组成 。一般 采用 1台
系统油路采用单 向节流阀, 使得油液进入油缸时, 具有 单 向阀导通 时 的功 能 , 入油 缸 的流量 较大 ; 进 而从 油 缸
流 回油箱 时 , 有节 流 阀 的 功 能 , 量 相 对 较小 , 控 具 流 以 制 调运 速度 。采 用液 控单 向阀 , 得补偿 油 缸 , 油 压 使 进 力 达 到一定 值是 , 液才 能流 回油 箱 , 到 系统工 作 平 油 起 稳 的作 用 , 提高 补偿 的稳 定性 。
将 高压 乳化 液供 给 液压 支 架 , 过 操 作 液 压 支架 的控 通 制 阀来 实 现 支 架 的 升 降 、 架 、 架 护 壁 、 护 等 动 移 调 支 作 l 。乳化 液泵 站还 可 以作 为 工 作 面 上 、 出 口处 超 1 j 下 前 支 护用 单 体 液 压 支 柱 的 动 力 源 。泵 站 与 支 架 之 间形成 一个 完整 的液 压泵 、 系统 。 缸
起重机起升机构溜钩原因分析及改进设计
起重机起升机构溜钩原因分析及改进设计摘要:随着起重机应用时间的增加,产生溜钩问题的可能性会增加,若是并未及时进行问题处理,将会直接影响起重机应用效果。
因此相关工作人员应该重点研究导致起重机起升机构产生溜钩问题的原因,并以此为据改进起重机设计方案,降低起重机出现溜钩现象的概率,对于提升起重机应用安全具有促进作用。
本文首先分析导致起重机起升机构产生溜钩问题的原因,其次探讨起重机起升机构改进设计方式,以期对相关研究产生一定的参考价值。
关键词:起重机起升机构;溜钩原因;改进设计引言:在起重机长时间处于运行状态时,出现异常故障的可能性比较多,通过提前对起重机起升机构开展改进设计,能够在一定程度上避免起重机起升机构出现运行问题。
因此设计人员应该提前分析会使起重机出现溜钩状况的影响因素,事先规划起重机改进设计方案,从而保证起重机在使用时处于正常状态。
1导致起重机起升机构产生溜钩问题的原因1.1制动器故障导致起重机起升机构液压推杆制动器产生故障问题的原因主要包括三种,第一种,制动轮上存在油污,会降低制动闸瓦和制动轮的摩擦系数,一旦制动器抱闸处理时的摩擦力比较小,起重机在吊起重物的时候会产生停车下滑问题。
制动轮上存在的油污主要存在于齿轮联轴器的润滑脂中,一旦润滑脂油量比较多、油封产生破损问题,将会造成制动轮在运行时润滑油被甩溅到制动轮上方[1]。
第二种,制动器产生调整不当问题,在制动松闸间隙比较大、制动力矩比较小的时候,制动器的制动力会随之降低,此时吊钩可能会产生溜钩问题。
在制动器处在抱闸制动情况时,制动轮通常会与制动闸瓦呈现出紧密贴合状态,此时二者并不存在间隙,一旦存有间隙,制动闸瓦会暂时浮贴在制动轮之上,在制动力并未施加在制动轮上方时制动力矩会随之减少。
第三种,制动器产生机械卡滞问题,如果制动支架活动铰接位置在转动时处于不够灵活的状态、制动弹簧产生机械卡滞问题,将会造成制动器在断电以后并未进行抱闸,依旧处在松闸状态,此时吊钩会在重力影响下出现滑落问题。
集装箱起重机起升机构的超速保护设置改进
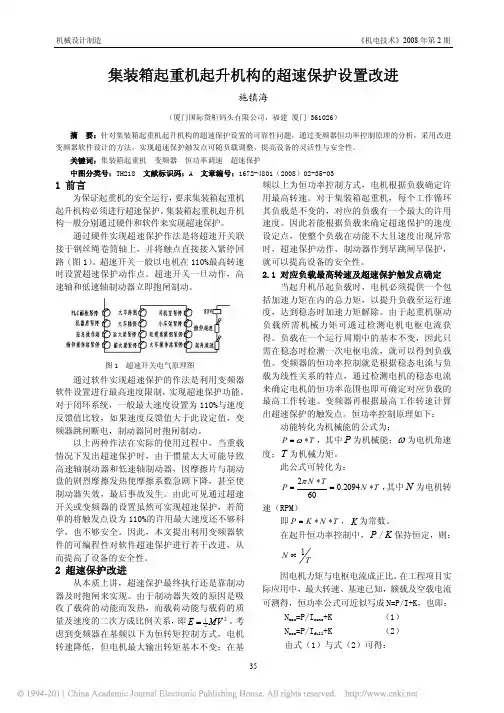
机械设计制造 《机电技术》2008年第2期集装箱起重机起升机构的超速保护设置改进施镇海(厦门国际货柜码头有限公司,福建 厦门 361026)摘 要:针对集装箱起重机起升机构的超速保护设置的可靠性问题,通过变频器恒功率控制原理的分析,采用改进变频器软件设计的方法,实现超速保护触发点可随负载调整,提高设备的灵活性与安全性。
关键词:集装箱起重机 变频器 恒功率调速 超速保护中图分类号:TH218 文献标识码:A 文章编号:1672-4801(2008)02-35-031 前言为保证起重机的安全运行,要求集装箱起重机起升机构必须进行超速保护。
集装箱起重机起升机构一般分别通过硬件和软件来实现超速保护。
通过硬件实现超速保护作法是将超速开关联接于钢丝绳卷筒轴上,并将触点直接接入紧停回路(图1)。
超速开关一般以电机在110%最高转速时设置超速保护动作点。
超速开关一旦动作,高速轴和低速轴制动器立即抱闸制动。
图1 超速开关电气原理图通过软件实现超速保护的作法是利用变频器软件设置进行最高速度限制,实现超速保护功能。
对于闭环系统,一般最大速度设置为110%与速度反馈值比较,如果速度反馈值大于此设定值,变频器跳闸断电,制动器同时抱闸制动。
以上两种作法在实际的使用过程中,当重载情况下发出超速保护时,由于惯量太大可能导致高速轴制动器和低速轴制动器,因摩擦片与制动盘的剧烈摩擦发热使摩擦系数急剧下降,甚至使制动器失效,最后事故发生。
由此可见通过超速开关或变频器的设置虽然可实现超速保护,若简单的将触发点设为110%的许用最大速度还不够科学,也不够安全。
因此,本文提出利用变频器软件的可编程性对软件超速保护进行若干改进,从而提高了设备的安全性。
2 超速保护改进从本质上讲,超速保护最终执行还是靠制动器及时抱闸来实现。
由于制动器失效的原因是吸收了载荷的动能而发热,而载荷动能与载荷的质量及速度的二次方成比例关系,即221MVE =。
考虑到变频器在基频以下为恒转矩控制方式,电机转速降低,但电机最大输出转矩基本不变;在基频以上为恒功率控制方式,电机根据负载确定许用最高转速。
QY16型汽车起重机下车液压系统优化设计
QY16型汽车起重机下车液压系统优化设计汽车起重机的液压系统是其重要组成部分,起着保证起重机正常运行以及实现起重操作的关键作用。
针对QY16型汽车起重机的液压系统进行优化设计,可以提高其工作效率和运行稳定性。
本文将从液压系统的元件选择、系统参数设计、液压系统工作原理等方面进行优化设计。
首先,对于液压系统的元件选择,应选择具有优良性能、稳定可靠的元件。
例如选择高品质的液压泵,能够提供充足的液压力和流量,保证起重机的起重能力。
同时,选用优质的液压油缸和阀门,以提高系统的稳定性和可靠性。
其次,对于系统参数设计,应根据QY16型汽车起重机的具体需求和工作环境进行合理的设计。
液压系统的工作压力、流量和速度等参数需要根据实际情况进行调整,以满足起重机的工作要求。
同时,还应注重系统的安全性设计,如设置安全阀、溢流阀等保护装置,以预防系统超载和压力过高的情况发生。
此外,液压系统的工作原理对于优化设计也非常重要。
液压系统主要由液压泵、液压缸、控制阀和液压油箱等组成。
在起重过程中,液压泵从液压油箱吸油,通过控制阀将液压油送入液压缸,从而实现起重操作。
因此,优化液压系统的工作原理,可以提高系统的工作效率和运行稳定性。
例如,采用双泵并联工作模式,可以提高系统的流量和起重速度;通过合理调整液压缸的尺寸,可以提高系统的起重能力和稳定性。
最后,对于液压系统的优化设计,还需要进行实际的测试和验证。
通过在实际起重场景下的验证测试,可以进一步确认液压系统的性能和可靠性,以及针对优化设计提出合理的改进建议。
综上所述,QY16型汽车起重机下车液压系统的优化设计,需要在元件选择、系统参数设计、工作原理等方面进行综合考虑,以提高起重机的工作效率和运行稳定性。
通过科学合理地设计液压系统,可以提高起重机的负载能力、运行速度和操作稳定性,提升起重机的整体性能,满足实际工作需求。
QUY50
输 出压 力油 ,而液控换 向阀此 时 已完全 开 启 。向卷
扬制动器提供了 3 a MP 的恒定压力 ,大于卷扬制动 器的 l ~ . M a 2 P 完全开启压力.制动器完全开启, 5 0 卷扬转动时不再出现抖动和液压系统压力异常升高 的现 象 , 此改进经 片户长 时问使用 , { 未再 出现故 障
MP 恒 压油源 。当操 纵手柄 徽动至 开始输出压 油 a
压马达从卷扬上拆下 ( 液压油管不拆 ) 操作起升操 , 纵手柄 ,马达正常运转 ,未出现故障 而后检查卷
扬机构.它有两种故障可能 卷扬减速机内齿轮破 碎卡死或制动器摩擦片烧结一空载时一般不会出现 齿轮破碎卡死,拆 r 制动器进行检查 ,发现制动器
维普资讯
使 .1维 修 R
QUYS 0履 带起 重机
起 升 机 构 故 障 分 析 及 改进
孙 彩
徐州重型机械厂 自主开发的 0 Y I u j 膛带起重 1
机 在试制期间起升机构曾发生故障不能运转 该 起升机构采崩行星减速机 ,制动器采用片式常闭制
凰 1 起升机构液压系统
原理图 【 改进 前 】 建 筑枧 械 2 0 11 0 2 t
图 2 起升机构液压系统 原理 图 ( 改进后 )
动器 .制动器的完全开启压力为 1 - a . 2 MP 起升 5 0 机构 的驱 动系统 泉 先导式 液压 系统 ,由液压 马达 直接驱动卷扬 减速机。 故障过程:起重机为空载 , 小幅度操作起升操 纵手柄 使卷扬实现微动 ,此时出现X  ̄ r @动时抖 4 动和液压 系统压 力异常 升高 ,压 力达 1MP 左 右 , 8 a
卷扬 仍不能转动
摩擦片烧结 卷扬空载微动时出现卷扬抖动和液压 系统压 力异常升高的现象,说明卷扬制动器没有完 全打开 .处于半离合状态 ,卷扬转动阻力大且 砸 定 ,故而出现卷扬抖动和液压系统压 力异常升高 , 制动 器摩 擦片之 间摩擦 生热 .导致烧结 卷扬制动器没有完全打开 . 可能是液压系统没 有提供足够的压力一分析液压系统 ( 如图 1 ,主阀 ) 起始开启的控制压力为{ MP . I a 主阀的溢流压力为 . 6 2MP , 2 a 操纵手柄的最小输 出压力为0 MP ,最大 a 6 输出压力为 3 a 当操纵 手柄微动至开始输出压 MP
浅谈液压管路的优化设计
浅谈液压管路的优化设计介绍了在液压系统管路设计中,为了更好的满足液压系统的要求,对液压钢管,配管图、管接头等进行的一些优化设计,以履带起重机、强夯机为实例,在实际生产制作中的注意事项,提高了生产率,增强了对操作者的指导作用,对液压系统的设计完善起到了很好的帮助,同时可为其他设计者提供参考。
标签:液压管路;优化设计;安装液压技术与现代社会中人们的日常生活、工农业生产、科学研究活动产生着日益密切的关系,已成为现代机械设备和装置中的技术构成、现代控制工程的基本技术要素和工业及及国防自动化的重要手段,并在国民经济各行业以及几乎所有技术领域中广泛应用,应用液压技术的程度已成为衡量一个国家工业化水平的标志。
所以正确合理的设计与使用液压系统,对于提高各类液压机械及装置的工作品质和技术经济性能具有重要意义。
液压系统中除了动力元件、执行元件,还有做为液压附件的管道。
液压管路必不可少,尽管它是液压附件,但也是液压系统组成中不可或缺的重要组成部分,管路选择是否恰当却对系统有着重要影响。
在本文,我们就结合履带起重机、强夯机实例来浅谈一下如何对液压管路的设计优化,使我们的液压系统更好的运行,更好的保证液压系统的稳定性能。
一、液压管路的设计在第一台履带起重机的液压设计中,起先液压油箱和液压泵不处在同一转台侧,引起吸引管路过长,吸油阻力大,后来改进了,将液压泵和液压油箱放在同一侧。
虽然液压油泵吸油管路较短,但是对液压泵的工作影响却很大;若吸油阻力大,严重时将会出现空穴现象,空穴现象会使液压装置产生振动及噪声从而影响车辆的正常工作;若管路体积过大,将会影响油箱的结构及尺寸设定,且会造成成本增加。
因此合理设计管路就显得尤为重要。
液压系统配管中,钢管排布的优化,管接头、胶管的选型都很重要。
在实际的设计中,钢管弯制的部位太多造成压力损失大且不易制作,图纸中的液压钢管的估算要准确,钢管在车架上的排布合理化。
如果多人设计,胶管参数的标准要统一,否则不便于实际指导安装;管接头的种类繁多,轻型、重型要严格区分开,有效保证系统性能。
35吨履带起重机臂架系统设计
35吨履带起重机臂架系统设计随着工程施工的不断发展,起重机设备作为一个重要工程机械,在工程施工中扮演着不可或缺的角色。
而履带起重机作为一种具有较强移动性和承载能力的起重机,广泛应用于建筑、桥梁、码头等各种工程项目中。
起重机的臂架系统作为起重机的核心部件之一,直接关系到起重机的性能和安全性。
本文将以35吨履带起重机臂架系统设计为主题,探讨其结构设计、性能参数及优化改进等方面。
一、系统结构设计1、臂架结构设计起重机臂架主要由臂架主体、拉杆系统及液压系统等组成。
臂架主体是支撑整个起重机吊臂的主要构件,其设计应考虑到整体的强度和稳定性。
拉杆系统是用于调整吊臂长度和角度的机构,需要具备良好的稳定性和灵活性。
液压系统是辅助驱动和控制起重机臂架的主要动力系统。
臂架主体采用优质钢材焊接而成,通过有限元分析确定其强度和刚度,以确保其在吊重过程中不发生变形或损坏。
拉杆系统选用优质合金钢材,经过表面处理提高其耐磨性和耐腐蚀性,同时采用螺纹连接设计,保证其可靠性和便捷性。
液压系统的设计应考虑到起重机的工作环境和作业需求,确保其稳定可靠和高效运行。
2、控制系统设计起重机臂架的控制系统应包括液压系统控制、电气系统控制和液压电气集成等部分。
液压系统控制主要包括主溢流阀、节流阀、液压油箱、液压泵等部件,通过调节液压油的流量和压力实现对臂架的升降和伸缩等动作控制。
电气系统控制主要包括传感器、控制器、电机等部件,通过信号传递和协调实现对臂架动作的精准控制。
液压电气集成则是将液压系统和电气系统集成在一起,通过智能控制技术实现对臂架系统的全面、精准控制。
在控制系统的设计中,应考虑到起重机的实际工作环境和工作需求,确定合适的控制方案和控制策略,确保起重机臂架系统的安全可靠和高效运行。
二、性能参数及优化改进1、性能参数分析起重机臂架的性能参数包括起升高度、最大起重量、最大工作半径、最大伸缩长度等。
起升高度决定了起重机的吊装高度,需要根据具体的工程需求确定。
全自由叉车后起升液压缸的故障分析与结构改进
全自由叉车后起升液压缸的故障分析与结构改进安徽叉车集团公司技术中心钟继萍王旭兵盛玉洁为了改善叉车的通过性,采用自由起升装置。
自由起升叉车是在叉车外形高度不变的条件下,能将货物起升到一定高度的叉车。
根据自由起升高度不同,分为部分自由起升和全自由起升。
本文讨论全自由起升叉车。
全自由起升叉车采用液压缸自由提升装置,叉车货叉架沿叉车内门架移动全部行程时,内门架静止不动,叉车外形高度保持不变。
全自由起升叉车适用于集装箱、仓库、船舱等低净空场所作业。
1全自由叉车的液压系统简介起升装置的液压管路见图1。
当叉车的多路阀位于起升位置时,液压泵输送来的液压油经过多路阀、限速阀进入后起升液压缸,再通过高压油路进入前起升液压缸(起自由提升作用)。
溢流阀又称安全阀,它确保整个液压系统在其设定的压力值下能够正常工作。
按照设定,作业时,起自由提升作用的前起升液压缸先进行工作,此时叉车的外形高度尺寸不变,实现了叉车的自由提升。
当前起升液压缸起升完毕后,后起升液压缸开始工作,继续带动货物完成起升。
图1起升装置的液压管路图1 液压泵2 滤油器3 溢流阀4 多路阀5 限速阀6 前起升液压缸7 后起升液压缸2间隙缓冲后起升液压缸间隙缓冲装置作为一种通用性强的缓冲方式,广泛应用于小吨位全自由起升叉车的起升液压缸。
其目的是控制货物快要下降到位时的下降速度,减少高速金属接触时产生的撞击,降低噪声。
间隙缓冲液压缸(如图2所示)采用液压节流的原理,把液压缸内的液压油回油流量降低到所需量,达到减小下降速度的目的,从而起到缓冲作用。
由于其原理简单实用,制作方便,成本较低,所以间隙缓冲的应用范围较广。
但是此种缓冲的缺点是在货物起升时同样存在进油节流的现象,以致短时间内叉车的起升速度下降。
特别是用于全自由起升叉车的后起升液压缸时,此种现象更明显。
当前起升液压缸以正常的速度带动货物提升至其行程完成后,后起升液压缸开始进油工作,但由于间隙缓冲装置的存在,导致叉车起升货物空中短时间内缓慢上升。