松下A4参数设定
松下A4系列交流伺服调试资料

一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1.松下数字式交流伺服系统MHMA2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.1 0、No.11、No.12,适当降低系统增益。
松下伺服A面板操作
松下伺服A面板操作文档编制序号:[KK8UY-LL9IO69-TTO6M3-MTOL89-FTT688]A5面板操作一、需要设定的参数二、监视器的观测1、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按3次上键显示d04.trq(转矩指令),再按一次设置键S进入监控值状态;2、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按4次上键显示d05.nPS(反馈脉冲总和),再按一次设置键S进入监控值状态;3、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按5次上键显示d06.cPS(指令脉冲总和),再按一次设置键S进入监控值状态;4、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按13次上键显示d15. oL(过载率),再按一次设置键S进入监控值状态;5、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按9次下键显示d27. Pn(PN间电压),再按一次设置键S进入监控值状态;三、参数的修改?1、驱动器上电后按一次设置键S进入d01.SPd;2、按一次模式键M进入参数设定模式PAr.000,通过上、下、左键选择所要修改的参数,按设置键S进入该参数的设定值;3、把对应参数的设定值修改后,再按住设置键S约2秒后,界面自动返回到对应的参数设定模式PAr.***;四、EEPROM写入模式?1、在返回到对应的参数设定模式PAr.***后,再按一次模式键M进入参数EEPROM写入模式EE_SEt;2、按一次设置键S进入EEP - 模式;3、再按住向上键约5秒后,显示EEP---逐渐增加直到显示rESEt或FiniSh为止,设置参数写入完毕。
五、JOG试运行方法1、驱动器上电后按一次设置键S进入d01.SPd;2、按3次模式键M进入辅助模式AF_ACL,按4次向上键直到出现AF_JOG;3、按一次设置键S进入JOG - 模式;再按住向上键约5秒后,显示JOG---逐渐增加直到显示rEAdy为止;4、再按住向左键约5秒后,右边的小数点逐渐向左边移动,直到显示SrV_on为止;5、此时按住上、下键即可进行电机正反转。
松下伺服,台达,西门子变频器参数(应用版)

1.0横移伺服驱动器的设定A4注:其它参数都是缺省值。
1.1上下伺服驱动器的设定A4注:其它参数都是缺省值。
、松下A5(MCDHT3520E)伺服器相关参数设置(用PANATERM VER5.0软件调试)(配USB mini-B通讯线连接到驱动器X1)1,Pr-002:4 (PANATERM软件运行调试机械磨合好刚性,增益之后,设为0).4变为02,Pr-003:4-13 (根据机械手运行后的平稳情况而定,近几台机器都是横移为13、升降为11----4)3,Pr-004:(软件自动调,一般为100-600)4,Pr-007:35,Pr-008: 横移为2020、升降为2000(PLC程序中相对A4的距离和速度都*10),Pr-010则无效6,Pr-100, Pr-101, Pr-102等跟增益有关的参数都是在Pr-002不为0的情况下,运行之后会自动变化的7,伺服-ON即激磁,在PLC程序里,必须设计为只要无报警,则长通;刹车也是。
8,参考英利湿化学J588右进(11#)(S-10-200)或J588左进(12#)(S-10-199)松下伺服电机A5软件下载/描述:由于软件过大,摧荐上松下网站下载,复制以下网址就加入到讯雷等下载软件下载即可/setupsoft/setup.exe运行PANATERM ver 5.0 软件1.2 1、3、4、6、7槽/配碱搅拌泵变频器的设定(台达VFD-M与触摸屏MT4500T通信)EviewMT4500T屏(20画面)的1-6槽循环泵数值输入元件的输入地址中的:HMI都是0,PLC是5/6/7/8/9,地址类型都是4X,地址都是8194,8194=2001H+1,2001H是VFD变频器参数中P92中取03时,MODBUS RTU模式,资料格式8N2中对变频器的命令2001H频率命令,2001H十六进制换为十进制=8193,因触摸屏地址是从0开始的所以需加1。
VFD变频器的输出COM与M0由Y232-Y237直接控制输出。
松下A4系列伺服增益调整

内控文件
MINAS A4系列
目标
业界NO.1的小型化、高性能化及易操作
内控文件
增益调整难吗?
能够简单地调整客户高兴、自己也高兴。大家的幸事!
基本用实时自动调整对应可能。 (并且想充实的情况有理论的知识就好了。)
2
何谓好的控制? ①稳定性
不发生振动及持续性振荡
输出
内控文件
2自由度 控制器 自动 频率调整 振动抑制 滤波器 转矩 控制
负载
马达
滤波器 无效 滤波器频率 滤波器搜集 时间50ms
适应型 振动抑制滤波器 速度
他社比较
松下A4 M社J3 Y社ΣⅢ
对应振动频率范围宽(~1500Hz) 适应动作的快速搜集结束(理论上的)
◎
△
×
22 无此功能
収束短时间 试验动作必要 (50ms) (2~10秒钟声音)
内控文件
使之往复运动。
惯量比自动推定。(Pr.20自动输入) 请确认往复运动几次使推定值稳定。
刚性(Pr.22)慢慢地提高。(4→5→6→…) 调查稳定动作的限界。(从声音和发生振动来判断) 根据Pr.22 的设定值自动设定增益 (Pr.10、11、12、13、14、15)
Kpp、Kvp、Tvi、Vfil、Tfil、Kff
速度応答設定[Hz] 350 300 250 200 150 100 50 0 0 1 2 3 4 5 6 7 8 9 剛性設定
内控文件
开发品(A4) 使用(Pr.21=1~6) 第一增益(停止时) 第二增益(动作时) 位置增益低 ⇔ 位置增益高 速度PI控制 速度P控制 未使用 ・ 因动作位置変化、经年变化
手动设定 对应不可能
松下A4驱动器参数设置项目表
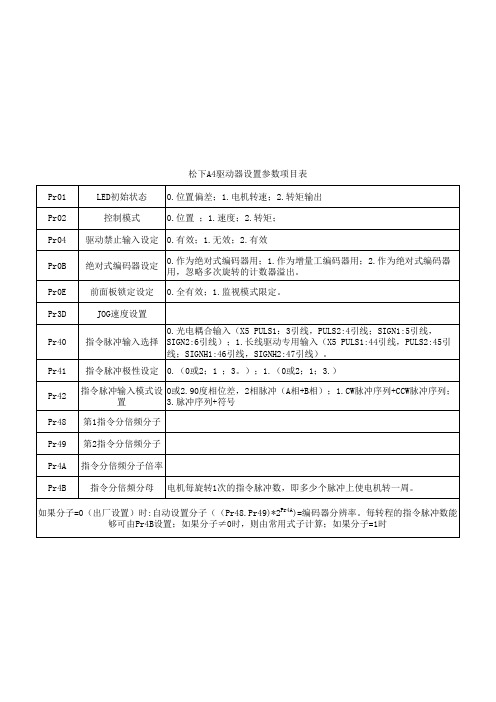
Pr01LED初始状态0.位置偏差;1.电机转速;2.转矩输出Pr02控制模式0.位置 ;1.速度;2.转矩;
Pr04驱动禁止输入设定0.有效;1.无效;2.有效
Pr0B绝对式编码器设定0.作为绝对式编码器用;1.作为增量工编码器用;2.作为绝对式编码器用,忽略多次旋转的计数器溢出。
Pr0E前面板锁定设定0.全有效;1.监视模式限定。
Pr3D JOG速度设置
Pr40指令脉冲输入选择0.光电耦合输入(X5 PULS1:3引线,PULS2:4引线;SIGN1:5引线,SIGN2:6引线);1.长线驱动专用输入(X5 PULS1:44引线,PULS2:45引线;SIGNH1:46引线,SIGNH2:47引线)。
Pr41指令脉冲极性设定0.(0或2;1 ;3。
);1.(0或2;1;3.)
Pr42指令脉冲输入模式设
置
0或2.90度相位差,2相脉冲(A相+B相);1.CW脉冲序列+CCW脉冲序列;
3.脉冲序列+符号
Pr48第1指令分倍频分子
Pr49第2指令分倍频分子
Pr4A指令分倍频分子倍率
Pr4B指令分倍频分母电机每旋转1次的指令脉冲数,即多少个脉冲上使电机转一周。
松下A4驱动器设置参数项目表
如果分子=0(出厂设置)时:自动设置分子((Pr48.Pr49)*2Pr4A)=编码器分辨率。
每转程的指令脉冲数能够可由Pr4B设置;如果分子≠0时,则由常用式子计算;如果分子=1时。
松下A4调试
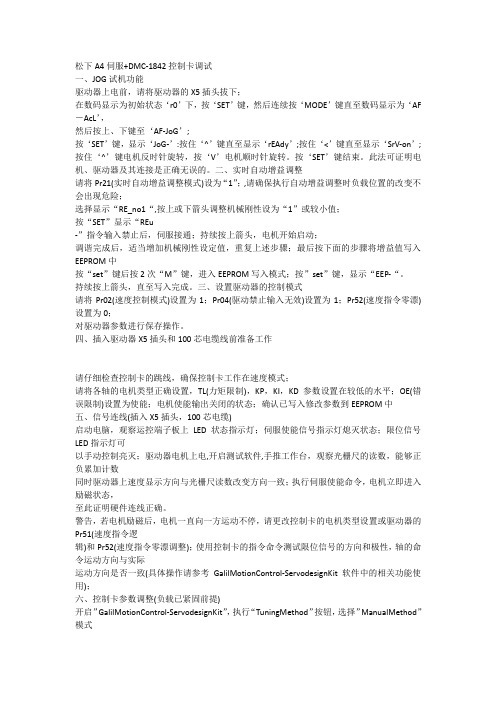
松下A4伺服+DMC-1842控制卡调试一、JOG试机功能驱动器上电前,请将驱动器的X5插头拔下;在数码显示为初始状态‘r0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF -AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG-’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转。
按‘SET’键结束。
此法可证明电机、驱动器及其连接是正确无误的。
二、实时自动增益调整请将Pr21(实时自动增益调整模式)设为“1”;,请确保执行自动增益调整时负载位置的改变不会出现危险;选择显示“RE_no1“,按上或下箭头调整机械刚性设为“1”或较小值;按“SET”显示“REu-”指令输入禁止后,伺服接通;持续按上箭头,电机开始启动;调谐完成后,适当增加机械刚性设定值,重复上述步骤;最后按下面的步骤将增益值写入EEPROM中按“set”键后按2次“M”键,进入EEPROM写入模式;按”set”键,显示“EEP-“。
持续按上箭头,直至写入完成。
三、设置驱动器的控制模式请将Pr02(速度控制模式)设置为1;Pr04(驱动禁止输入无效)设置为1;Pr52(速度指令零漂)设置为0;对驱动器参数进行保存操作。
四、插入驱动器X5插头和100芯电缆线前准备工作请仔细检查控制卡的跳线,确保控制卡工作在速度模式;请将各轴的电机类型正确设置,TL(力矩限制),KP,KI,KD参数设置在较低的水平;OE(错误限制)设置为使能;电机使能输出关闭的状态;确认已写入修改参数到EEPROM中五、信号连线(插入X5插头,100芯电缆)启动电脑,观察运控端子板上LED状态指示灯;伺服使能信号指示灯熄灭状态;限位信号LED指示灯可以手动控制亮灭;驱动器电机上电,开启测试软件,手推工作台,观察光栅尺的读数,能够正负累加计数同时驱动器上速度显示方向与光栅尺读数改变方向一致;执行伺服使能命令,电机立即进入励磁状态,至此证明硬件连线正确。
伺服JOG+ 文档
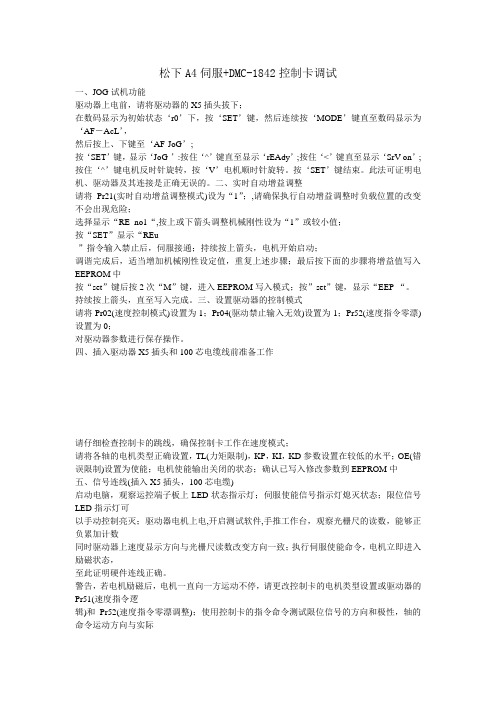
松下A4伺服+DMC-1842控制卡调试一、JOG试机功能驱动器上电前,请将驱动器的X5插头拔下;在数码显示为初始状态‘r0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG-’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转。
按‘SET’键结束。
此法可证明电机、驱动器及其连接是正确无误的。
二、实时自动增益调整请将Pr21(实时自动增益调整模式)设为“1”;,请确保执行自动增益调整时负载位置的改变不会出现危险;选择显示“RE_no1“,按上或下箭头调整机械刚性设为“1”或较小值;按“SET”显示“REu-”指令输入禁止后,伺服接通;持续按上箭头,电机开始启动;调谐完成后,适当增加机械刚性设定值,重复上述步骤;最后按下面的步骤将增益值写入EEPROM中按“set”键后按2次“M”键,进入EEPROM写入模式;按”set”键,显示“EEP-“。
持续按上箭头,直至写入完成。
三、设置驱动器的控制模式请将Pr02(速度控制模式)设置为1;Pr04(驱动禁止输入无效)设置为1;Pr52(速度指令零漂)设置为0;对驱动器参数进行保存操作。
四、插入驱动器X5插头和100芯电缆线前准备工作请仔细检查控制卡的跳线,确保控制卡工作在速度模式;请将各轴的电机类型正确设置,TL(力矩限制),KP,KI,KD参数设置在较低的水平;OE(错误限制)设置为使能;电机使能输出关闭的状态;确认已写入修改参数到EEPROM中五、信号连线(插入X5插头,100芯电缆)启动电脑,观察运控端子板上LED状态指示灯;伺服使能信号指示灯熄灭状态;限位信号LED指示灯可以手动控制亮灭;驱动器电机上电,开启测试软件,手推工作台,观察光栅尺的读数,能够正负累加计数同时驱动器上速度显示方向与光栅尺读数改变方向一致;执行伺服使能命令,电机立即进入励磁状态,至此证明硬件连线正确。
松下伺服A4A5接线及参数设置

松下伺服A4\A5系列产品接线及参数说明A4/A5脉冲控制接线:以下7根线必须接才能使电机转动。
第29脚接0V,伺服使能作用第7脚接+12/24V第41脚接0V根据你的上位机I/O端驱动电流的大小分别对应选择如下的集电极开路接法:正常的:大于10mA的:第3、5脚都接+5V(串一个100Ω1/2W的电阻)/+12V(串一个1KΩ1/2W 的电阻)/+24V(串一个2KΩ1/2W的电阻);第4脚接脉冲;第6脚接方向小于10mA的:第1、2脚都接+24V(不需串电阻);第4脚接脉冲;第6脚接方向特殊的:大于10ma的:第4、6脚都接0V;第3脚接脉冲;第5脚接方向小于10ma的:第4、6脚都接0V;第1脚接脉冲;第2脚接方向A4参数Pr.02=0(控制模式)Pr.40=0(指令脉冲输入选择)Pr.41=0(指令脉冲极性设置)Pr.42=3(指令脉冲输入模式设置)其他参数为默认值即可实现正反转。
A5参数Pr0.01=0(控制模式)Pr0.05=0(指令脉冲输入选择)Pr0.06=0(指令脉冲极性设置)Pr0.07=3(指令脉冲输入模式设置)其他参数为默认值即可实现正反转。
A4/A5驱动器X6端口与电机的接线方法:(屏蔽线芯至少要大于或者等于0.18平方毫米)驱动器端:第1脚是E5V,第2脚是E0V,第5脚是PS,第6脚是PS非,壳体是屏蔽线;电机端:第4脚是E5V(白色),第5脚是E0V(黑色),第2脚是PS(淡蓝色),第3脚是PS非(紫色),第6脚是FG(屏蔽线);A5/A4参数Pr0.00/Pr.=1(旋转方向设定)Pr0.01/Pr.02=0(控制模式设定)Pr0.02/Pr.21=1(设定实时自动调整)Pr0.03/Pr.22=4/13(设定实时自动调整机器刚性)Pr0.04/Pr.20=100/250(惯量比)Pr0.05/Pr.40=0(指令脉冲输入选择)Pr0.06/Pr.41=0(指令脉冲极性设置)Pr0.07/Pr.42=1(指令脉冲输入模式设置)Pr0.08/Pr.4b=10000(电机每旋转1次的指令脉冲数)A4/A5驱动器X6端口(SM-6P)与电机的接线方法:(屏蔽线芯至少要大于或者等于0.18平方毫米(RVVP4X0.3))驱动器端:第1脚是E5V,第2脚是E0V,第5脚是PS,第6脚是PS非,壳体是屏蔽线;电机端:第4/H脚是E5V(白色),第5/G脚是E0V(黑色),第2/K脚是PS(淡蓝色),第3/L脚是PS非(紫色),第6/J脚是FG(屏蔽线);A4/A5驱动器动力线与电机的接线方法:(动力线芯至少要大于或者等于0.5平方毫米(4 X0.75/2.5))驱动器端-电机端:U-1/A/F(红色),V-2/B/I(白色),W-3/C/B(黑色),接地-4/D/E (黄绿),用航空插头时G、H是接制动器的;。