凸轮型线设计课件
凸轮机构及其设计ppt课件

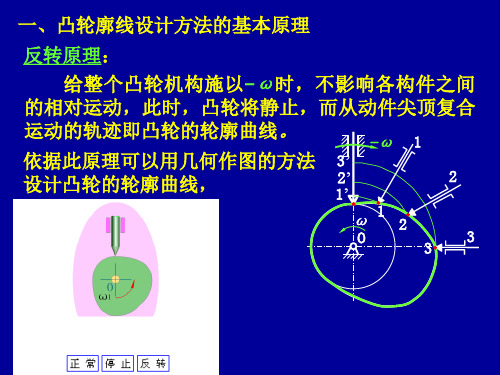
反转法原理
给整个凸轮机构加上一个与凸轮转动的角速度ω大 小相等、方 向相反的角速度-ω,此时凸轮不动,从动件一方面随导路以- ω绕轴转动,另一方面又在导路中按预定的运动规律作往复移动。 由于从动件的尖顶始终与凸轮轮廓相接触,其尖顶的运动轨迹就 是凸轮轮廓曲线
依据此原理可以用几何作图的方法 设计凸轮的轮廓曲线,例如:
格要求。则应选择直线或圆弧等易加工 o
δ
曲线作为凸轮的轮廓曲线。如夹紧凸轮。 a
+∞Biblioteka 2. 机器的工作过程对推杆运动有要求,
δ
则应严格按工作要求的运动规律来设计凸 o
轮廓线。如刀架进给凸轮。
-∞
3. 对高速凸轮,要求有较好的动力特性, 正弦改进等速
除了避免出现刚性或柔性冲击外,还应当
考虑Vmax和 amax。
作时振动、噪音都比较小,可以用于高 速、轻载的场合。
δ
a amax=6.28hω2/δ02
无冲击,但amax 较大。
δ
将几种运动规律组合,以改善运动特性。 s
二、选择运动规律
h
选择原则:
o 1.机器的工作过程只要求凸轮转过一角
δ
δ
度δ0时,推杆完成一行程h〔直动推杆〕 v
0
或φ〔摆动推杆),对运动规律并无严
的基圆半径r0,角速度ω和推杆的运动规 律,设计该凸轮轮廓曲线。
-ω
8’ 9’
ω
7’
11’
5’ 3’
12’
1’
13’
14’
12 345 67 8 9 11 13 15
设计步骤小结: ①选比例尺μl作基圆r0。 ②反向等分各运动角。原则是:陡密缓疏。 ③确定反转后,从动件尖顶在各等份点的位置。 ④将各尖顶点连接成一条光滑曲线。
凸轮轮廓曲线的设计市公开课金奖市赛课一等奖课件
图9-21
x y
=( =(
s0 + s0 +
s s
)sinδ )cosδ
+ -
ecosδ esinδ
凸轮理论廓线方程
式中e为偏距,s0 = r02 e2 。
第16页
∵ 工作廓线与理论廓线在法线方 向距离处处相等,且等于滚子半
径 rr 。
∴ 当已知理论廓线上任意一点B (x ,y)时,则可得到工作廓 线上相应点B′( x ′,y ′)。 由高等数学知识,理论廓线B点处法线斜率(与切线
6)在各条切线上,由基圆开始向外量取S线图上相应长度11′、 22′、33′、……,得点1′、2′、3′、……。此即代表推杆 尖顶在复合运动中依次占据位置;
第6页
7)光滑连接1′、2′、 3′、……[此例中:4′与 5′、8′(8)与9′(A)之间 为圆弧],此即为所设计凸 轮轮廓曲线。
注: 对于对心直动推杆盘形凸轮机构,能够认为是e=0时
注意:e为代数值,其正负要求为:当凸轮沿逆时针方向转动时,
若推杆处于凸轮回转中心右侧, e为正,反之为负;当凸
轮沿顺时针方向转动时,推杆处于中心左侧,e为正,反
之为负。
第18页
2、对心直动平底推杆(平底⊥导路)盘形凸轮机构 如图9-22所表示建立Oxy坐
标系。B0点为凸轮推程段廓线起 始点,当凸轮转过(即推杆反 转)δ角度时,推杆位移为s, 平底与凸轮在B点相切。
由理论廓线方程对δ求导,得:
dx/dδ=(ds/dδ-e)sinδ+(s0 +s)cosδ dy/dδ=(ds/dδ-e)cosδ-(s0+s )sinδ
工作廓线上相应点B′( x′ ,y′)坐标为:
凸轮轮廓曲线的设计42页PPT
11、获得的成功越大,就越令人高兴 。野心 是使人 勤奋的 原因, 节制使 人枯萎 。 12、不问收获,只问耕耘。如同种树 ,先有 根茎, 再有枝 叶,尔 后花实 ,好好 劳动, 不要想 太多, 那样只 会使人 胆孝懒 惰,因 为不实 践,甚 至不接 触社会 ,难道 你是野 人。(名 言网) 13、不怕,不悔(虽然只有四个字,但 常看常 新。 14、我在心里默默地为每一个人祝福 。我爱 自己, 我用清 洁与节 制来珍 惜我的 身体, 我用智 慧和知 识充实 我的头 脑。 15、这世上的一切都借希望而完成。 农夫不 会播下 一粒玉 米,如 果他不 曾希望 它长成 种籽; 单身汉 不会娶 妻,如 果他不 曾希望 有小孩 ;商人 或手艺 人不会 工作, 如果他 不曾希 望因此 而有收 益。-- 马钉路 德。
46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。—
《凸轮机构设》课件

凸轮机构的分类
凸轮机构可分为直线型凸轮、圆弧型凸轮和椭圆型凸轮,每种凸轮形式适用 于不同的运动转换需求。
直线型凸轮的设计
直线型凸轮的设计需要考虑凸轮的轨迹形状以及与其他零件的配合,以达到 所需的运动转换效果。
圆弧型凸轮的设计
圆弧型凸轮的设计需要考虑凸轮的半径和角度,以及与其他零件的配合,以实现所需的运动转换目标。
椭圆型凸轮的设计
椭圆型凸轮的设计需要考虑凸轮的椭圆形状参数,以及与其他零件的配合,实现旋转到直线或曲线的运动转换。
快速设计凸轮的方法
快速设计凸轮的方法包括使用计算机辅助设计软件、凸轮设计图谱和经验设 计法。
凸轮机构设在机械制造中的应用
机床制造
凸轮机构在机床的进给和工作台移动系统中得到 广泛应用。
凸轮机构设在机械改进中的应 用
凸轮机构设在机械改进中的应用可以提高机械设备的性能、效率和可靠性, 推动工业制造的发展进步。
凸轮机构设的未来发展趋势
凸轮机构设的未来发展趋势包括智能化、小型化、高效化和功能多样化等方向。
《凸轮机构设》PPT课件
本课件将深入探讨凸轮机构设计。包括凸轮机构的工作原理、分类、设计方 法以及在机械制造中的应用。欢迎加入本次精彩的凸轮之旅!
什么是凸轮机构设
凸轮机构设是一种机械传动机构,通过凸轮的运动将直线运动转变为曲线运动,广泛应用于机械制造领域。
凸轮机构的工作原理
凸轮机构依靠凸轮的几何形状,通过与其他零件的配合,将旋转运动转变为 直线运动或曲线运动。
凸轮机构设与高效机械制造的关系
凸轮机构设作为高效机械制造的基础之一,对机械制造的效率、稳定性和精度等方面起到关键作用。
凸轮机构设在节能机械制造中 的应用
凸轮机构设在节能机械制造中的应用可以降低能量消耗,提高机械系统的效 率和环保性能。
凸轮机构及其设计PPT精品医学课件
思考题 1从动件的常用运动规律是指哪几个物理量的变化规律 ?
位移、速度、加速度
2如何判断某种运动规律从动件是否有冲击?何种性质的冲击?
判断凸轮在某位置时所对应从动件的加速度有无突变。 若加速度存在无穷大突变,则为刚性冲击; 若加速度存在有限值突变,则为柔性冲击
3选择或设计从动件运动规律应考虑那些因素 ?
5.4 凸轮机构基本尺寸的确定
1凸轮轮廓的压力角 从动件的运动方向和凸轮作用于它的法向力 Fn方向之间所夹的 角称为压力角 将从动件受力F分解为:
推杆驱动力 F1=Fcosα; 导路正压力 F2=Fsinα; 产生的最大摩擦力Ff = F“ f 。当存在 关系Ff F‘ 时,机构发生自锁; 有f tanα 1。 压力角a愈大,有效分力Fy愈小。当a角大到某一数值时,会出现Fy<Fx。 不论施加多大的Fn力,都不能使从动件运动,这种现象称为自锁。为 保证凸轮机构正常工作,必须对凸轮机构的压力角进行限制。
5-4-1
一般随压力角α增大,机构的磨损加重、传力性能恶化、效
率降低→与工程实践相一致 。 凸轮机构设计时,应满足:αmax≤[α] 一般许用压 力角[α]的经 验值为:
从动件 推程 回程 移动 [α]= 30~40° 摆动 [α]= 45~50°
[α]=70~80°
凸轮基圆半径r0与其各位置压力角αi 密切相关。增大r0则αi 减小; 减小r0必然导致αi 增大。即结构紧凑与传力性能良好间存在矛盾。 虽然偏距e也能适量减小推程压力角,但却会增大回程压力角。运用时 应注意偏置方位。
5-3-2
作图
取比例尺μ1,先根据已知尺寸作出基圆与偏距圆,然后用 反转法作图设计。逆时针左偏,顺时针右偏
当e=0时,即对心直动尖顶推杆盘形凸轮机构。其设计方法与上述 方法基本相同,不同的是推杆反转时其各导路位置线始终过轴心
机械制图凸轮设计 教学课件PPT凸轮轮廓设计
④将各尖顶点连接成一条光滑曲线。
(右)偏置直动尖顶从动件盘形凸轮绘制过程
(右)偏置直动滚子从动件盘形凸轮绘制过程
4)摆动尖顶推杆盘形凸轮机构
已知凸轮的基圆半径r0,角速度ω,摆杆长度l以及摆
杆回转中心与凸轮回转中心的距离d,摆杆角位移方程, 设计该凸轮轮廓曲线。
4’ 3’ 2’ 1’
12 3 4
2)对心直动滚子推杆盘形凸轮
已知凸轮的基圆半径r0,角速度ω
和从动件的运动规律,设计该凸轮 轮廓曲线。
8’ 7’ 5’ 3’ 1’
1 3 5 78
9’ 11’ 12’
13’ 14’
9 11 13 15
理论轮廓
-ω
ω
作者:潘存云教授
设计:潘存云
设计步骤小结:
实际轮廓
①②选反比向例 等尺 分μ各l运作动基角圆。r0原。则是:陡密缓疏。
一、凸轮廓线设计方法的基本原理
反转原理:
给整个凸轮机构施以-ω时,不影响各构件之间
的相对运动,此时,凸轮将静止,而从动件尖顶复合
运动的轨迹即凸轮的轮廓曲线。
-ω 1
依据此原理可以用几何作图的方法 3’
设计凸轮的轮廓曲线,
2’
2
1’
ω 1 2 作者:潘存云教授
O
33
设计:潘存云
二、直动从动件盘形凸轮轮廓的绘制
5’ 6’
7’
8’ 5 67 8
d A8
A7
A
l B’1 B B1
r0 ω
A1-ω
φ1
B’2 B’3φ2
A2
B2 B3
B’φ4 3
120°B4
A3
φ7
B89作0B者°7:潘B6存0云6 教°授设B计5:潘存云
第9章凸轮机构及其设计PPT课件

s= s(t) = s(δ ) v= v(t) = v(δ ) a= a(t) = a(δ )
s
B’
D δ02
δ’0
A
r0
δ0
h
o
ω
t 360° δ0 δ01 δ’0 δ02 δ
δ01
B
C
-
5
2.推杆常用的运动规律
(1)多项式运动规律
位移方程: s c 0 c 1 c 22 c nn
则无冲击。
-
/2
0
0
11
3)五次多项式运动规律
s c 0 c 1 c 22 c 33 c 44 c 55
v d s d t ( c 1 2 c 2 3 c 3 2 4 c 4 4 5 c 5 5 )
a d v d t 2 ( 2 c 2 6 c 3 1 2 c 42 2 0 c 53 )
2h(
'0 2
'0
)2
v
4 h ( '0 2
'0
)
a
4h 2 '0 2
-
/2
0
0
10
2)二次多项式运动规律(等加等减速)
特点:加速度曲线有突变,加速 度的变化率(即跃度j)在这些位置 为无穷大——柔性冲击
适应场合:中速轻载
分析若满足:
δ=0 时,s=0,v=0,a=0 δ=δ0时,s=h,v=0,a=0
2h
2 0
2
v
4 h
2 0
a
4h 2
2 0
0/2,sh/2,v2h/0 0,sh,v0
s
h
2h 02
( 0
凸轮机构及其设计4课件

v
o 123 456 7 8
a
-amax
56 78
o 123 4
ቤተ መጻሕፍቲ ባይዱ
•凸轮机构及其设计(4)
•16
推杆常用运动规律特性比较及适用场合
运动规律 等速运动
最大速度 (ωh/Φ) X
1.00
最大加速度 (ω2h/Φ2) X
最大跃度 (ω3h/Φ3) X
适用场合 低速轻载
等加等减速
2.00
4.00
中速轻载
余弦加速度
5 O3
O2 7
•凸轮机构及其设计(4)
•1
二、凸轮机构的分类 1)按凸轮的形状分:
(avi) 移 动 凸 轮
盘形凸轮(avi)
•凸轮机构及其设计(4)
圆 柱 凸 轮
(avi)
•2
2)按从动件的形状分:
尖顶从动件
滚子从动件
•凸轮机构及其设计(4)
平底从动件
•3
3)按从动件的运动形式分:
移动从动件 摆动从动件
amax -amax
•凸轮机构及其设计(4)
•14
对RDRD型运
s
5'
6'
4'
3' h/2
动循环,该运动 2'
s
规律在推程的起、
1' 0
12 3
4
56
止瞬时,从动件
v
的加速度有突变, 故存在柔性冲击。 适用于中、低速 场合。
1 2 3 4 5 6
a
1 23 4 56
amax -amax
•凸轮机构及其设计(4)
一、凸轮廓线设计方法的基本原理
假想给正在运动着的整个凸
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内燃机课程设计凸轮说明书题目90kW四行程四缸汽油机凸轮型线设计学院机电工程学院专业热能与动力工程专业班级热动1002学号姓名指导老师刘军日期2013-6-2590kW四行程四缸汽油机凸轮型线设计前言四冲程汽车发动机都采用气门式配气机构,其功用是按照发动机的工作顺序和工作循环要求,定时开启和关闭各缸的进、排气门,使新气进入气缸,废气从气缸排出。
其中,凸轮机构作为机械中一种常用机构,在自动学和半自动学当中应用十分广泛,凸轮外形设计在配气机构设计中极为重要,这是由于气门开关的快慢、开度的大小、开启时间的长短都取决于配气机构的形状。
因此,配气凸轮的外形设计和配气凸轮型线设计就决定了时间的大小、配气机构各零件的运动规律及其承载情况。
任务书首先对凸轮进行设计,然后利用最大速度和最大加速度位置基于高次方程凸轮运动规律进行凸轮型线的优化设计,建立数学模型,并设计图论过渡段和绘制图轮廓图。
凸轮的设计1.给定的参数及要求(1)凸轮设计转速nc=4636r/min;(2)进气门开启角233°(曲轴转角),凸轮工作段包角116.5°;(3)排气门开启角220°(曲轴转角),凸轮工作段包角110°;(4)气门重叠角15°(曲轴转角),凸轮转角7.5°;(5)凸轮基圆直径 28mm;(6)进气门最大气门升程hvmax =8.2,排气门最大气门升程hvmax=8。
2.凸轮型线类型的选择配气机构是发动机的一个重要系统,其设计好坏对发动机的性能、可靠性和寿命有极大的影响。
其中凸轮型线设计是配气机构设计中最为关键的部分,在确定了系统参数后,重要的问题是根据发动机的性能和用途,正确选择凸轮型线类型及凸轮参数。
凸轮型线有多种,如复合正弦,复合摆线,低次方,高次方,多项动力,谐波凸轮等。
其中,高次方、多项动力、谐波凸轮等具有连续的高阶倒数的凸轮型线,具有良好的动力性能,能满足较高转速发动机配气机构工作平稳性的要求。
由于凸轮设计转速为n c =2318 r/min ,即每分钟凸轮轴转2318圈,属于高速发动机,且为使发动机运动件少,传动链短,整个机构的刚度大,因此我们用双圆弧凸轮的凸轮轴上置式配置机构。
由于四冲程发动机每完成一个工作循环,每个气缸进、排气一次。
这时曲轴转两周,而凸轮轴只旋转一周,所以曲轴与凸轮轴的转速比或传动比为2:1,即由上式已知可知曲轴的转速为2318*2=4636r/min 。
3.计算凸轮的外形尺寸图一 圆弧凸轮的几何参数示意图由上图可知,圆弧凸轮有五个参数:基圆半径r 0=PR ,腹弧半径r 1=OA ,顶弧半径r 2=CB ,基本工作段作用角∠QPR=2φ0和挺住最大升程h tmax 。
其中有题中给出的已知数据有基圆半径r 0、基本工作段作用角2φ0和最大升程h tmax 。
为使圆弧凸轮能可靠地工作,凸轮型线外形应连续圆滑,这就要求各段圆弧在交接点处有公切线或公法线,所以各几何参数之间有一点的约束。
凸轮型线连续圆滑的条件是:腹弧与顶弧的交点B 、顶弧圆心C 、腹弧圆心O ,这三点应在一条直线上。
根据余弦定理,从 △OPC 中可得OPC cos PC OP 2-PC OP OC 222∠+= (1) 由凸轮的几何关系可知PO =r 1-r 0 PC =r 0+h tmax -r 2OC =r 1-r 2 OPC ∠=180o -φ将上式代入(1)可得公式(r 1-r 2)2=(r 0+h tmax -r 2)2+(r 1-r 0)2+2(r 0+h tmax -r 2)(r 1-r 0)∙cos φ0(2)可见,在五个参数中只有四个可以预先选择,其余一个必须满足上式要求。
基圆半径r 0、基本工作段作用角2φ0和最大升程h tmax 都为已知值,可以设计出凸轮的外形。
基圆半径r 0根据凸轮轴直径d t 决定,为了保证加工和维修的可能,常取r 0=0.5d t +1~3mm 。
可知凸轮轴的直径为22~26mm 。
我们取凸轮轴的直径为24mm 。
凸轮作用角2φ0 决定于已选定的配气机构,对进气凸轮有:2φ0 =0.5(180o +α1+α2) 式中 α1-进气提前角,单位(o );α2-排气提前角,单位(o )。
对排气凸轮有:2φ0 =0.5(180o +β 1+β2)式中 β1-进气提前角,单位(o);β2-排气提前角,单位(o )。
挺住的最大升程h tmax 决定与气门所要求的最大升程h qmax 。
h h qmax tmax i 1=式中 i-摇臂的摇臂比,一般i=1.2~1.7,常用为1.5.在凸轮直接驱动气门的顶置凸轮轴式气门机构中,i=1.由于r 0、2φ0、h tmax 三个参数在设计凸轮型线之前已初步确定,所以双圆弧凸轮的设计,实际上是在r 1、r 2两个参数中任选一个,确定一个即可。
由于r 1的选择范围很大,而r 2的选择范围很小,所以先选r 2再选r 1是很合理的。
在选择r 2时,应注意不要使r 2过小,以免凸轮变尖,导致凸轮尖端处接触应力过大,而使凸轮与挺住一对摩擦副产生早起损伤。
凸轮在长期使用尖端磨损超过极限后,必须重新磨削,因此必须留下磨削欲量。
一般认为r 2min 应大于2mm 。
(1)进气凸轮的设计: 设定进气凸轮的r 2=4mm ,则有: (r 1-4)2=(14+8.2-4)2+(r 1-14)2+2(14+8.2-4)(r 1-14)∙cos (58.25 o +7.5 o ) r 12-8r 1+16=18.22+r 12-28r 1+196+2*18.2*(r 1-14)*0.411 解,得5.0396r 1=301.7944 r 1=59.885mm 如下图所示:图二 进气凸轮的尺寸(2)排气凸轮的设计:设定排气凸轮的r2=3mm,则有:(r1-4)2=(14+8-4)2+(r1-14)2+2(14+8-4)(r1-14) cos(55o+7.5o)r 12-8r1+16=182+r12-28r1+196+2*18*(r1-14)*0.462解,得3.368r1=271.152r1=80.508mm图三排气凸轮的尺寸运动规律的分析下面进一步分析凸弧凸轮平面挺柱的运动规律,也即平面挺柱的升程ht、速度vt 、加速度at在凸弧凸轮型线上随凸轮转角α的变化规律。
图四凸弧凸轮平面的升程()r r 180a 21212maxD O O sin sin -==-︒O O φr r 210max Dsin sin -=φαr r C C C O O C C C h 0232322121Dcos t2-+=-+==β)(O A A A O A A A h 13321121t 1+-==为分析方便,计算分段进行。
第一阶段(即挺柱与腹弧相接触的阶段),当挺柱在A 点相接触(α=0)的时刻起即开始上升(图四中),当凸轮转过α角时,挺柱的升程为(3)式中 O A 11=r 1rA A 032=))((ααcos 1cos r r O O O A 01113--==代入(3)得()[]αcos t r r r r h 0111-+-=经整理得 ()()αcos 1t r r h 011--=第一阶段凸轮的最大转角αmax由△ OO 1O 2的关系决定,即由此得在计算挺柱第二阶段(即挺柱与顶弧接触段)的升程时(图四),为方便计算,凸轮转角将由相当与气门全开位置C 点开始,逆着凸轮的旋转方向计算。
在β角处挺柱的升程为同时加减一个h tmax ,则得 ()βcos 1D h h tmax t --= 第二阶段凸轮的最大转角βmax按下式计算αφβmax 0max -=将上面所得的挺柱升程与转角关系对时间求导,可得相应转角的速度。
挺柱在第一段上的速度为()αωsin dtdh r r v 01t t1t1-==βωDsin dt dh t t2t2v ==()αωcos dt dv r r a 012t t1t1-==βωDcos dtdv 2tt2t2a -==式中 t ω—凸轮旋转角速度,在第一阶段上,挺柱速度在max α时达到最大值。
在第二段上挺柱速度为在第二段上,挺住速度在βmax时达到最大值。
在第一段上挺柱的加速度为在第一段上,挺柱加速度在a=0时达到最大值。
在第二段上挺柱的加速度为在第二段上,挺柱加速度在β=0时达到最大值。
图五 第一阶段挺柱的速度图六第二阶段挺柱的速度图七第一阶段挺柱的加速度图八第二阶段挺柱的加速发动机进气凸轮型线发动机挺柱的升程图九凸轮整体运动情况图十凸轮工作段的情况配气机构在实际运动过程中,运动从凸轮开始,经过一长串传动链才传到气门。
过去在进行气门运动规律的计算时,人们通常把配气机构简单地视为刚性系统,认为气门的运动完全受凸轮外形控制,只要确定了凸轮从动件的运动规律,求出升程曲线丰满系数及最大正、负加速度,就足以判别凸轮设计的优劣,因而只进行运动学计算,是一个纯几何问题.但是,由于传动链本身具有一定的质量和弹性,工作时产生的弹性变形会使位于传动链末端气门处的运动产生很大畸变,即气门的升程、速度,特别是加速度曲线“失真”.气门的运动有时滞后于挺柱,有时又超越挺柱,使传动链脱节,气门开闭不正常、反跳,整个机构震动和噪音加大,甚至机构的正常工作遭到破坏。
随着发动机转速的提高,这种因传动链变形而产生的不利影响尤为明显,因此有必要对内燃机配气机构进行动力学分析,以便对配气机构的动力学性能进行评价,为配气机构的设计提供一种评价的理论依据。
为了验证所设计的型线符合动力学要求,对所优化的新型线进行了动力学仿真。
上图图是根据运动学与动力学分别计算出来的加速度,可以看出,挂动学公式计算的加速度与动力学差异比较大,说明对凸轮进行动力学仿真确实是非常必要的高次多项动力凸轮升程曲线数学模型的建立由于该发动机是一高速发动机,因此重点对高次多项式凸轮和多项动力凸轮进行分析对比首先从设计期望的气门升程规律开始,其气门升程函数一般采用七次多项式,其形式为:()x C x C x C x C x C x C C SS RR QQ PP 44220a h ++++++=式中,α----为凸轮转角(o );αB ----为凸轮基本工作段的半包角(o );h(a)----为气门升程;x----为转角比,在凸轮的上升阶段:x=1-a/a B ,有a=0时,x=1,α=αB 时,x=0;在下降阶段:x=a/a B -1。
C 2x 2----此项保证在气门升程最大处有一最大负加速度,因此要求C 2<0; C 4x 4----自由项,C 4可自由选取。
用于控制气门负加速度的曲线形状,使其vV d dh=αd h d 2v 2=α03d h d v3=α0d h d 4v 4=αC C C C C 4S R QP 242-S 1-S S 2-R 1-R R 2-Q 1-Q Q 2-P 1-P P -=+++))(())(())(())((与气门弹簧特性很好配合。