工程测量 视距测量与方位角计算
测量坐标方位角计算
测量坐标方位角计算在数学和物理学中,坐标方位角是指从参考方向(通常为正方向)开始逆时针旋转到目标方向所需的角度。
这个术语通常用于描述平面坐标系中的点。
为了测量坐标方位角,可以使用以下步骤:Step 1:确定参考方向在测量坐标方位角之前,需要确定参考方向。
这通常是正方向,可以选择为x轴或y轴的正方向。
例如,可以选择x轴的正方向作为参考方向。
Step 2:计算向量坐标方位角涉及到从参考方向到目标方向的旋转角度。
为了计算旋转角度,需要先计算从参考方向到目标方向的向量。
可以使用下面的公式来计算向量的分量:v_x=x-x_0v_y=y-y_0其中,(x_0,y_0)是参考点的坐标,(x,y)是目标点的坐标。
Step 3:计算方位角一旦计算出向量的分量,可以使用向量的分量来计算方位角。
可以使用反正切函数来计算角度。
反正切函数的定义如下:θ = atan2(v_y, v_x)其中,θ表示方位角,atan2(是一个数学函数,用于计算反正切。
Step 4:转换为度数在计算方位角后,结果通常以弧度表示。
如果需要以度数表示,可以将方位角乘以180并除以π(π是圆周率)。
θ_degrees = θ * 180 / π这样就得到了以度数表示的方位角。
总结:测量坐标方位角的步骤包括确定参考方向,计算向量的分量,使用反正切函数计算方位角,然后将结果转换为度数。
这个过程可以帮助我们找到从参考方向到目标方向的旋转角度。
坐标方位角的概念在很多领域中都有应用,例如导航、无人机操作和图形设计。
工程测量计算
h1
hAB h a b
水准测量手簿
日期 天气 仪器 地点 观测 记录
测站 Ⅰ Ⅱ Ⅲ
测点
BMA TP1 TP1
BMA
TP1 TP1 TP2 TP2 TP2 TP2 BB
水准尺读数 后视(a) 前视(b) 1467 1.467 1124 1.124 1385 1.385 1021 1.021 1869 1.869 0943 0.943
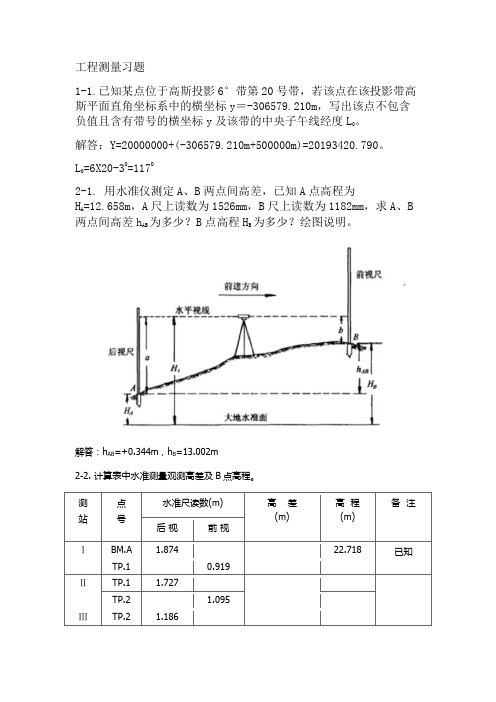
四、水准测量的实施
如下图所示,当欲测的高程点B距水准点A较远或高差较大时,安置一次仪器不 能测出A、B两点间的高差,就要分段和连续地进行测量工作。
1、踏勘选点建立标志; 2、拟定水准路线; 3、观测记录
a3 b2 b1
TP2
b3 B
Ⅲ
a2 a1
TP1
h3
hAB
Ⅱ
h2
Ⅰ
A
h1 a1 b1 h2 a 2 b2 h3 a 3 b3
往
593.391
返
593.400
往
491.360
返
497.301
•••
••• ••• ••• ••• ••• ••• ••• •••
11o3249
118.780 1.440 1.502 0.022 +118.740
11o3306
-118.829 1.491 1.400 0.022 -118.716
O D
(2)下半测回
倒镜成盘右,逆时针依次观测A,D,C,B,A。
同理各测回间按1800/N的差值,来配置水平度盘。
B C
零方向 A O D
3.计算、记录
(1)半测回归零差: J2 ≤ 12 " ;J6 ≤ 18 " 。 (2)2C值(两倍照准误差): 2C=盘左读数-(盘右读数±180°)。 一测回内2C互差:J2≤18 " ;J6不作要求。
起算方位角计算公式
起算方位角计算公式方位角是指一个点相对于另一个点的方向角度,通常以北方向为基准,顺时针方向为正角度,逆时针方向为负角度。
在地理测量、导航和工程测量等领域,方位角的计算是非常重要的。
在本文中,我们将介绍起算方位角的计算公式及其应用。
起算方位角的计算公式如下:tan(θ) = (sin(Δλ) cos(φ2)) / (cos(φ1) sin(φ2) sin(φ1) cos(φ2) cos(Δλ))。
其中,θ表示起算方位角,Δλ表示目标点经度与起始点经度的差值,φ1和φ2分别表示起始点和目标点的纬度。
在实际应用中,我们通常使用这个公式来计算两个点之间的方位角,以便进行导航、测量或定位。
首先,我们需要确定起始点和目标点的经纬度坐标。
然后,根据上述公式,计算出起算方位角。
这个角度可以帮助我们确定目标点相对于起始点的方向,从而进行导航或测量。
在地理测量中,起算方位角的计算也经常用于确定地表上两个点之间的距离和方向。
通过测量起算方位角,我们可以计算出两点之间的直线距离,从而进行地图绘制、土地测量等工作。
另外,起算方位角的计算还可以应用于航空导航和航海导航中。
飞行员和航海员可以利用起算方位角来确定飞行或航行的方向,从而确保航线的准确性和安全性。
在工程测量中,起算方位角的计算也是必不可少的。
工程师们可以利用这个公式来确定工程项目中各个点之间的方向和距离,从而进行工程测量和设计。
总之,起算方位角的计算公式是地理测量、导航和工程测量等领域中非常重要的工具。
通过这个公式,我们可以准确地计算出两个点之间的方向角度,从而进行导航、测量和定位工作。
希望本文对您有所帮助,谢谢阅读!。
土木工程测量--距离测量
Wild 新T2+DI1000
Wild T1600+DI4L
Kern ME5000激光测距仪-世界上精度最高的测距仪
喜利得(HILTI)手持激光测距仪PD30 • 产地:德国 • 用途:建筑施工与房产测量中的距离、面积、体积 测量。 • 测距范围:0.5~200M • 测距精度:±1.5MM
徕卡DISTO A8手持激光测距仪
Kl C 待测两点的高差
h iv
仪器高i
中丝读数ⅴ
4.2.3 视线倾斜的水平距离和高差计算 水平距离
D Kl cos
2
高差公式
1 2 h Kl cos i v 2
视距测量要注意的两个问题: (1)量仪器高; 盘左盘右观测 (2)保证仪器 可提高精度 视距丝在视距尺范围内
B
B1
M
无障碍延长定线方法
C
有障碍延长定线方法
4.1.3 直线一般丈量法
(1)适用条件:平坦地段、可沿地面直接丈量;精度 要求不高。 (2)丈量方法: 1)平地丈量法:用测钎标志尺端位置,用整尺段丈 量。在末尺段用零尺段丈量。设钢尺长度为l,末尺 段的长度为q,并且共丈量了n个整尺段,则丈量的总 长度为
注意:相邻定线点之间 距离要小于钢尺长度
(二)钢尺量距
最基本的要求——平、准、直。
按精度分:一般量距和精密量距
1、一般量距步骤 (1)定线:在两点之间确定一系列中间点的工作 按精度分:目估法和经纬仪法。
(2)丈量
(a)喊“预备”、“好”前后尺手同时读数,相减。 (b)在山区,可用平量法、斜量法。 测钎
历年真题讲解
• 用钢尺在平坦地面上丈量一段距离.往测为178.344米, 返测为178.296米,则该段距离的相对误差为 【 】 • A.1/3000 B.1/3700 C.1/3900 D.1 /4000 • 5.视距测量时,量取仪器高的精度至 【 】 • A.mm B.cm C.dm D.m
工程测量习题
工程测量习题1-1.已知某点位于高斯投影6°带第20号带,若该点在该投影带高斯平面直角坐标系中的横坐标y=-306579.210m,写出该点不包含负值且含有带号的横坐标y及该带的中央子午线经度L0。
解答:Y=20000000+(-306579.210m+500000m)=20193420.790。
L0=6X20-3O=117O2-1. 用水准仪测定A、B两点间高差,已知A点高程为H A=12.658m,A尺上读数为1526mm,B尺上读数为1182mm,求A、B 两点间高差h AB为多少?B点高程H B为多少?绘图说明。
解答:h AB=+0.344m,h B=13.002m2-2. 计算表中水准测量观测高差及B点高程。
测站点号水准尺读数(m) 高差(m)高程(m)备注后视前视ⅠBM.A 1.874 22.718 已知TP.1 0.919ⅡTP.1 1.727TP.2 1.095ⅢTP.2 1.1862-3在表中进行附合水准测量成果整理,计算高差改正数、改正后高差和高程。
点号路线长L(km) 观测高差 hi(m)高差改正数(m)改正后高差(m)高程H(m) 备注BM.A 1.5 +4.362 -0.015 +4.347 7.967 已知1 12.3140.6 +2.413 -0.006 +2.4072 14.7210.8 -3.121 -0.008 -3.1293 11.5921.0 +1.263 -0.010 +1.2534 12.8451.2 +2.716 -0.012 +2.7045 15.5491.6 -3.715 -0.015 -3.730BM.B 11.819 已知∑fh=∑h测-(HB-HA)=+66mm fh容=±40=±104mm-9.85mm/km ∑=-66mm3-1. 用J6型光学经纬仪按测回法观测水平角,整理表3-1中水平角观测的各项计算。
表3-1 水平角观测记录解答:注意检查限差。
工程测量 第4章 距离测量

②辅助工具
辅助工具主要有温度计、弹簧秤、锤球、测钎和标杆 温度计:测定温度;弹簧秤:控制拉力; 垂球:垂球用来投 点 ;测钎:用来标记所量尺段的起止点和查记尺段数;标杆: 标定直线。
测钎:测钎用粗铁丝磨尖制成,长约 30cm , 用来标志
所量尺段的起、 止点和计算已量过的整尺段数。
标杆:标杆长2-3m,直径3-4cm,杆上涂以20cm间隔 的红、白漆,以便远处清晰可见,用于标定直
一、电磁波测距原理
设电磁波在测距仪与反光镜(合作目标)之间 往返的时间为t。则测距仪至反光镜的距离
1 S Ct 2
–光在真空中的传播速度为C0=299792458米/秒。
按电磁波理论: 光是电磁波,其数学表达式为: E A sin(t 0 ) 它表达了光波在转播空间任一位置上电磁振动 的状态。 其中: A是振幅;
(5)要在成像稳定的情况下进行观测。
§4-3 光电测距
1948年瑞典AGA厂推出了第一台光波测 距仪随着需求的增长和光学、微电子学的发 展使电磁波测距的技术迅速发展。进一步推 进了测量学的发展。尽管GPS应用很广,短
程电磁波测距仪仍然大有用途
电磁波测距仪的分类
按载波分 • 微波测距仪 • 激光测距仪 • 红外光测距仪 按测程分 • 远(长)程测距仪 • 中、短程测距仪
平距 高差 D(m) h(m)
高 程 H(m )
1.817
1.310 B 1.316
0.796 1.03 9 93°22′ 48″
- 3°22′48″
103.539
6.121
1.835
A:1/2(m+n) -v= -0.0005
B:1/2(m+n) -v= -0.0005
工程测量学 复习资料(完整版)
第一章1、测量学包括那些学科?大地测量学、摄影测量与遥感学、地图制图学、工程测量学、海洋测绘学、普通测量学。
2、土木工程测量的任务:a、大比例尺地形图的测绘和应用b、施工测量c、建筑物的变形观测、3、高斯平面直角坐标:一般应用于测区的范围较大,我国采用的是高斯平面投影。
4、绝对高程:地面至大地水准面的铅垂距离称为绝对高程。
5、相对高程:由任意水准面起算的地面点高程即地面点至任意水准面的铅垂距离称为相对高程,也叫假定高程。
6、测量的基本工作:平面直角坐标的测定、高程的测定。
7、测量工作的基本原则:从整体到局部,先控制后碎部,步步有检核。
第二章1、水准测量原理:水准测量是利用水准仪提供的水平视线在水准尺上的读数,直接测得地面上两点间的高差,进而由已知高程推算出未知点的高程。
2、前视点、后视点:设水准测量方向是从E点往F点进行,规定称E点为后视点,其尺上读数为后视读数,称F点为前视点,其尺上读数b为前视读数。
3、水准仪的构造:望远镜、水准器和基座。
4、水准仪的使用步骤:安置、粗平、瞄准、精平、读数。
5、高差:后视读数—前视读数6、水准测量方法:水准测量一般是从已知水准点开始,测至待测点,求出待测点的高程。
a、当两点间相距不远,高差不大,且无视线遮挡时,只需安置一次水准仪就可以测得两点间的高差。
b、当两点间相距较远或高差较大或有障碍物遮挡时,不可能仅安置一次仪器就测得两点间的高差,此时,可在水准路线中加设若干个临时过渡立尺点,称为转点,把原水准路线分为若干段,一次连续安装水准仪测定各段高差,最后取各段高差的代数和,即可得到起终点上的高差。
7、水准测量的容许闭合差:三等:f容=±12f容=±4四等:f容=±20f容=±6等外:f容=±40f容=±12其中L表示水准路线单程千米数,n为单程测站数。
8、三四等水准仪的区别:仪器区别,往返区别,离地面高度区别,高差闭合差公式区别。
工程测量ppt第四章 距离测量
测 量 次 数 1
前尺读数
后尺读数 (m) 29.946 0.051 29.952 0.055 29.943
温度
温度改正 (mm)
高差(m)
倾斜改正 (mm)
改正后的尺段长度(m)
备注
29.895
25.8°C
0.272
A-1
2
29.897
29.896 +2.1 -1.2
2.5
29.8994
3 0.047 29.933 0.016 29.96 0.045 29.952 0.036
29.896
1
29.917
27.6°C 29.916 +2.7
+0.174 2.5 -0.5 29.9207
1-2
2
29.915
此记录表是记录A至 B往测数据
3
29.916
…… …… …… …… …… ……… ……… …… …… 1 1.88 0.076 1.87 0.064 1.86 1.804
27.5°C
4 钢尺精密量距的成果整理
⑵温度改正 设钢尺在检定时的温度为t0℃,丈量时 的温度为t℃,钢尺的线膨胀系数α。则某 尺段l的温度改正为: Δlt=α(t-t0)l
4 钢尺精密量距的成果整理
⑶ 倾斜改正 设沿地面量斜距为l,测得高差为h,换成平距d要进行 倾斜改正。
l h
改正公式为:
d
2 2 1/ 2
视距测量精度一般为 1/200 ~ 1/300 ,精密视距测 量可达 1/2000 。由于视距测 量用一台经纬仪即可同时完 成两点间平距和高差的测量 ,操作简便,所以当地形起 伏较大时,常用于碎部测量 和图根的加密。
视线水平时
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、标准方向
1.真子午线方向:地面上某
点指向地球北极的方向。
P
真子午线上一点的切线 方向,又叫真北方向,用天文 测量或用陀螺经纬仪测量。
2、磁子午线方向:磁针在地球磁场的作 用下自由静止时所指的方向。
X
Y
3、坐标纵轴(x轴):高斯—克吕格平 面直角坐标的坐标纵轴方向
D
f n q k n 100 n; p
q f 0
二、视距测量的原理和公式
2、视准轴倾斜时
D=Kn cos2 α h=D tg α+i-l
M M’ N
C N’ B l D tgα
D’
α
i A D
h
三、视距测量方法
(1)将经纬仪安置在测站A,进行对中和整平。 (2)量取仪器高i (3)将视距尺立于欲测的B点上,分别读出上、下 视距丝和中丝读数l,将下丝读数减上丝读数得视 距间距n。 (4)在中丝不变的情况下读取竖直度盘读数,并 将竖盘读数换算为竖直角α。 (5)根据测得的n、α、i和l计算水平距离D和高差 h,再根据测站的高程计算出测点的高程。
根据△x、△y值判断:
象限 Ⅰ Ⅱ Ⅲ Ⅳ 方位角 △x + + △y + + -
180 180 360
2
α23
3
α21
三、坐标正、反算
1. 坐标的正算
已知A点的坐标 X A 、 y A , 直线AB的平距 s AB 和坐标方 位角 AB,计算B点的坐标 X B , yB 。
x
AB
s AB
Y
B
X
A
推算公式:
y
X B X A S AB cos AB YB YA S AB sin AB
2. 坐标的反算
yB ,计 已知A点的坐标 X A 、y A , B点的坐标 X B 、
算直线AB的平距 s AB 和坐标方位角 AB 。
推算公式:
X X B X A
AB arctan Y / X
S AB X
2 AB
Y YB YA
Y
2 AB
3. 方位角值确定 arctan Y / X ( 90,90)
视 距 测 量
一、视距测量的概念:
使用带有视距丝的仪器间 接地同时测定地面上两点间的 距离和高差。所用仪器是经纬 仪(有时可用水准仪)和水准 尺。
经纬仪和水准仪
视距丝
上丝 尺间隔
下丝
二、视距测量的原理和公式
1.
视准轴水平时 D=kn;
m
h=i-l
G
p g i δ fF dຫໍສະໝຸດ n l M B hA
D d f
正、反坐标方位角(对于A点来说的)相差180度。
坐标方位角的推算
若已知直线12的方位角α12,12和23间的水平角β2 左( 或β2右 ),来推算直线23的方位角 α23 。
推算公式 α23 = α12 +β2 左± 180° α23 = α12 -β2 左± 180° α12
1
β2 左 β2 右
视
测区____ __年_月_日 仪器高____
距
测
量
记
录
表
记录者____
观测者____ 天 气____
测站名称__ 测站高程___ 指标差x=__
乘常数__ 加常数__
四、视距测量误差主要来源
1. 2. 3.
4.
视距读数误差 竖直角测量误差 标尺倾斜误差 大气垂直折光的影响
第四节:直线定向
直线定向:确定直线的方向称为直线定向。
二、方位角、正、反方位角
方位角:自标准方向北端起算,顺时针转至某直线 的水平夹角,范围:0~360度 根据所取的标准方向 不同,方位角可分为:
真方位角 磁方位角 坐标方位角 N N B
A
AB
BA
由于真(磁)方位角在各点上不相同,而各点的坐标 北方向是相同的,因此测量上方位角是指坐标方位角。