A Note on Denavit-Hartenberg Notation in Robotics
工业机器人期末复习大纲

资
确定控制系统总体方案,绘制框图。
料
请
第二章
勿 泄
露
重复定位精度:指机器人重复到达某一目标位置的差异程度。
4. 机器人机械结构由三大部分组成:机身、臂部(含手腕) 、手部。 5. 机身往往具有升降、回转及俯仰三个自由度。 6. 臂部设计的基本要求:手臂应该具有足够的承载能力和刚度;导向性要好; 重量和转动惯量要小;运动要平稳、定位精度要高。 7.工业机器人手部的特点:手部与手腕相连处可拆卸;手部是末端操作器;手部 的通用性比较差;手部是一个独立的部件。 8. 工业机器人吸附式手部结构一般有磁力吸附式和真空吸附式两种。 9.工业机器人行走机构主要有车轮式、步行式、履带式等形式。
复
习
机械系统:机器人的足、腿、手、臂、腰及关节等,它是机器人运动和完成某项 任务所必不可少的组成部分。 驱动系统:用来有效地驱动执行机构的装置,通常采用液压、电气和气压,有直 接驱动和间接驱动二种方式。 控制系统: 是机器人的核心, 它负责对机器人的运动和各种动作控制及对环境的 识别。 感知系统:是机器人获取环境信息的工具,如视觉、听觉、嗅觉、触觉、力觉、 滑觉和接近觉传感器等,它们的功能相当于人的眼、耳、鼻、皮肤及筋骨。 现代工业机器人的控制器都是由计算机控制系统组成,控制方式主要有示教 再现、可编程控制、遥控和自主控制等多种方式。 5. 机器人系统的工作原理 机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出
工作空间: 表示机器人的工作范围,是机器人运动时手臂末端或手腕中心所能达 到的所有点的集合,也成为工作区域。 最大工作速度: 有的厂家指工业机器人主要自由度上最大的稳定速度,有的厂家 指手臂末端最大的合成速度,通常都会在技术参数中加以说明。 承载能力:指机器人在工作范围内的任何位姿上所能承受的最大质量。
机械臂 解算
机械臂解算机械臂是一种模仿人体臂膀的机械装置,通过电力、气动、液压等驱动方式实现运动。
机械臂在工业生产线上广泛应用,可完成复杂的操作任务,提高生产效率。
解算是机械臂中的一个重要环节,它能够确定机械臂执行器的位置,从而控制机械臂的运动。
机械臂的解算可以分为运动学解算和动力学解算两个方面。
运动学解算是通过机械臂的构型关系和运动规律来确定机械臂各个关节的位置和姿态。
动力学解算则是在已知机械臂的构型和负载条件下,计算各个关节的动力学性能,确定机械臂运动过程中的力、力矩和加速度等参数。
在机械臂的运动学解算中,有两种主要的方法:正解法和逆解法。
正解法是根据给定的关节角度和机械臂的几何参数,计算末端执行器的位置和姿态。
逆解法则是已知末端执行器的位置和姿态,求解关节角度。
正解法可以使用几何模型和旋转矩阵等方法来计算,逆解法则需要使用解析法或迭代法等计算方式。
机械臂解算的重要性在于它能够使机械臂实现精确定位和精确运动。
在工业生产线上,精确位置和稳定运动是保证产品质量和生产效率的关键因素。
通过解算,机械臂可以按照预定规划的路径和轨迹进行运动,完成需求的操作任务。
另外,在机械臂的动力学解算中,可以利用牛顿欧拉法和拉格朗日法等方法来计算机械臂各个关节的动力学参数。
这些参数包括关节的负载、力、力矩和加速度等,对于机械臂的控制和优化至关重要。
动力学解算可以帮助机械臂进行自适应控制和力控制,在处理复杂任务和不确定环境下具有重要的应用价值。
机械臂解算中的一种常用方法是DH法(Denavit-Hartenberg方法)。
DH法是一种通过坐标系变换来描述机械臂各个关节之间的运动关系和坐标关系的方法。
DH法通过为机械臂建立坐标系,定义坐标系的原点、坐标轴和坐标变换关系,从而实现机械臂的运动学和动力学分析。
除了DH法,还有一些其他的解算方法,如工具框法、束法和广义反解法等。
这些方法通过建立不同的数学模型和算法,来实现机械臂的解算和控制。
工业机器人校准技术与补偿方法发展现状及趋势

工业机器人的校准过程包括系统建模、 数据测量、 参数辨识和误差补偿[6] , 即: 通过建立工业机器人的 校准模型, 应用校准方法获取机器人末端执行器的实
· 2 · 综合评述
2021 年第 41 卷第 3 期
际位姿, 然后应用参数辨识方法获得具体的参数变化
规律[7 -8] , 之后进行参数补偿以达到提高其末端定位
工业机器人的长期使用可能导致其精度因磨损而 降低, 另外连杆长度、 连杆工具坐标系的定义偏差等 因素会导致工业机器人的位姿产生偏移, 也会对工业 机器人的使用精度造成极大影响。 目前, 解决上述问 题的主要方法是通过构建工业机器人的误差模型对工 业机器人进行误差补偿, 并完成工业机器人的校准[5] 。 但是, 目前国内工业机器人标准与校准规范尚不完善,
仅制定了 GB / T 12642 - 2013 《 工业机器人性能规范及 其试验方法》, 该标准主要定义了工业机器人的性能规 范及其试验方法。 目前国内还没有针对工业机器人末 端执行器绝对定位精度的相关校准规范, 因此开展工 业机器人末端执行器的校准与补偿方法研究十分重要。
本文首先介绍了工业机器人的校准模型, 在分析 和总结工业机器人的几何参数误差及运动学模型的基 础上, 从校准方法和补偿方法两个方面对工业机器人 的校准技术进行梳理, 并总结未来工业机器人校准技 术的发展趋势, 为未来工业机器人在线校准与误差补 偿规范标准的制定提供参考。
px = fpx ( X1 ,X2 ,X3 ,X4 ,X5 ,X6 )
py = fpy ( X1 ,X2 ,X3 ,X4 ,X5 ,X6 )
pz = fpz( X1 ,X2 ,X3 ,X4 ,X5 ,X6 )
(4)
ωx = fωx ( X1 ,X2 ,X3 ,X4 ,X5 ,X6 )
dh表示法角度方向

dh表示法角度方向一、什么是dh表示法角度方向1.1 dh表示法概述dh表示法(Denavit-Hartenberg表示法)是机器人学中常用的一种坐标系描述方法,用于描述机器人的关节结构和运动学特性。
它通过定义四个参数来描述每个关节之间的变换关系,其中一个重要的参数就是角度方向(dh表示法角度方向)。
1.2 dh表示法角度方向的定义在dh表示法中,角度方向指的是关节的旋转方向。
根据右手定则,我们可以定义关节的旋转方向为正方向,即逆时针方向为正,顺时针方向为负。
这个定义可以帮助我们准确地描述机器人的运动学特性。
二、dh表示法角度方向的应用2.1 机器人运动学分析在机器人运动学分析中,dh表示法角度方向起着重要的作用。
通过确定每个关节的角度方向,我们可以建立起机器人的坐标系,并计算出机器人末端执行器的位置和姿态。
2.2 机器人轨迹规划在机器人轨迹规划中,dh表示法角度方向也是一个关键因素。
通过控制每个关节的角度方向,我们可以实现机器人在空间中的运动轨迹规划,从而完成各种复杂任务。
2.3 机器人控制在机器人控制中,dh表示法角度方向也是一个重要的考虑因素。
通过控制每个关节的角度方向,我们可以实现机器人的精确控制,从而完成各种精密操作。
三、如何确定dh表示法角度方向3.1 机器人结构分析确定dh表示法角度方向的第一步是分析机器人的结构。
通过仔细观察机器人的关节连接方式和运动特性,我们可以确定每个关节的旋转方向。
3.2 右手定则确定dh表示法角度方向的一种常用方法是使用右手定则。
根据右手定则,我们可以将右手的大拇指指向关节的旋转轴,其他四指的弯曲方向即为关节的旋转方向。
3.3 关节限制在确定dh表示法角度方向时,还需要考虑关节的限制。
有些关节可能存在限制,只能在特定的范围内旋转,这也会影响到角度方向的确定。
四、dh表示法角度方向的注意事项4.1 统一标准在使用dh表示法描述机器人时,需要保持统一的标准。
即在整个机器人的描述中,所有关节的角度方向应保持一致,这样才能确保计算的准确性。
基于NAO机器人的自动运动学标定

基于NAO机器人的自动运动学标定樊绍桐;娄小平【摘要】运动学标定对仿人足球机器人NAO有着很重要的影响,同时也是NAO机器人赛前准备工作中关键的一步.本文针对现有标定方法存在耗时长、精度低、依赖人工操作等问题,设计出一套标定方法:首先,利用机器人自带的摄像头拍摄棋盘格标定板,然后,提取棋盘格角点的坐标,融合传感器数据后,利用LM算法将标定过程转化为求解非线性最小二乘的问题;最后,在NAO机器人上进行试验.结果表明,该方法能有效提升NAO机器人在运动过程中的稳定性,符合实际比赛需求.【期刊名称】《机器人技术与应用》【年(卷),期】2018(000)005【总页数】5页(P29-33)【关键词】机器人;NAO;运动学标定;LM算法【作者】樊绍桐;娄小平【作者单位】北京信息科技大学光电测试技术北京市重点实验室,北京,100192;北京信息科技大学光电测试技术北京市重点实验室,北京,100192【正文语种】中文0 引言在仿人足球机器人比赛中,运动学标定的精确度是机器人在比赛场上表现好坏的关键因素之一。
机器人在使用一段时间后,各个关节的零点会与初始值产生较大差异,而标定的目的是:减小基于系统数学模型得到的预测值与实际测量值之间的误差,这些误差通常来自于机器人本身不精确的装配和日常操作过程中舵机发生的磨损、变形[1]等。
目前,很多研究者对仿人机器人运动学标定进行了广泛研究。
其中,文献[2]和文献[3]都提出了基于手眼标定[4]理论的运动学标定方法。
该方法首先通过机器人头部的摄像头来观察附着于机器人末端执行器上的标记,而且每个标记的特征点在像素坐标系中的位置和读取到的各个关节的角度值都被收集起来,然后用于最小化测量值和基于机器人的数学模型(即运动学正解和摄像头的内参、外参)所得到的估计值之间的误差。
但由于该方法只能对单个末端执行器进行标定,而且不能自动完成标定过程,因此并不适用于仿人足球机器人的应用环境。
文献[5]提出利用粒子群算法进行逆运动学解,取得了一定成果,但是由于标准粒子群算法容易陷入局部最优解,无法跳出停滞状态,导致搜索停滞。
【豆丁-免费】-》搬运机械手的运动学分析
搬运机械手的运动学分析李桂莉,武洪恩,刘志海(山东科技大学机械与电子工程学院,山东青岛266510)摘要:根据搬运机械手的结构特点和性能要求,首先对其正向运动学进行了分析,得出其运动学方程式—操作臂末端在基坐标系下的位置关系式;然后对逆向运动学进行分析,根据操作臂末端的位置,确定出各关节的转角;最后根据机械手末端速度与关节变量速度之间关系分析,得出机械手的雅可比和逆雅可比。
关键词:机械手;运动学;雅可比;逆雅可比中图分类号:TP24 文献标志码:A 文章编号:100320794(2007)022*******K inem atics Analysis of Conveying ManipulatorLI G ui-li,WU H ong-en,LIU Zhi-h ai(C ollege of Mechanical and E lectronic Engineering of Shandong University of Science and T echnology,Qingdao266510,China) Abstract:Based on the mechanical structure and functional requirement,the forward kinematics of the trans2 portation manipulator is analyzed.The kinematics equation to describe the end of the manipulator in the basis coordinate is given.The inverse kinematics of the manipulator is als o analyzed,and the rev olute angle for each joint is found by the position of the manipulator end.And the Jacobian and inverse Jacobian of the manipulator is g ot by analyzing the relationship between the end speed and the joint variable speed.K ey w ords:manipulator;kinematics;Jacobian;inverse Jacobian0 引言搬运机械手是在自动线上搬运物料的一种自动化装置。
机器人学基础_第3章_机器人运动学
Kinematics treats motion without regard to the forces that cause it. Within the science of kinematics one studies the position, velocity, acceleration, and all higher order derivatives of the position variables (with respect to time or any other variable). 从几何学 几何学的观点来处 几何学 理手指位置 手指位置P与关节变量 关节变量 手指位置 L1, L2, θ1 和 θ 2的关系称为 运动学(Kinematics)。 运动学
(3.9)
3.1 Representation of Kinematics Equation of Manipulator
17
3.1 Representation of Kinetic Equation of Robot Manipulator
3.1 Representation of Kinematics Equation of Manipulator
12
3.1.1 Kinetic Pose and Oriented Angle Roll, Pitch, Yaw to represent motion pose
Denavit – Hartenberg( D-H)建模方法
Z 3
Z2 Y4 X3 X0 X1 X2 Y3
X4
d2
a0
a1
3-1-2 D-H坐标系的建立
为了确定各连杆之间的相对运动和位姿关系,在每个连杆上 固接一个坐标系。基坐标系{0}、坐标系{n}、坐标系{i}。 1、坐标系{0}和{n}的规定
Z(i - 1)
Z0轴沿关节轴1的方向,关节变 量1为零时,坐标系 {0}与{1}重合 关节1是旋转关节时, d0=0, 关节1是移动关节时, θ0=0
r12 r22 r32 0
r13 r23 r33 0
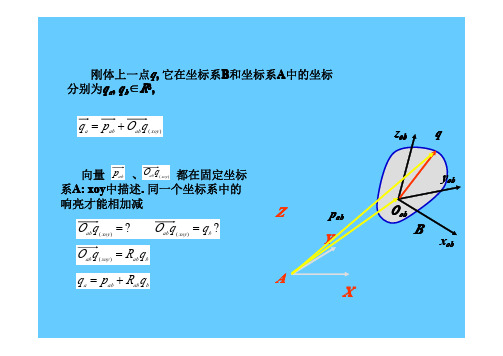
pabx ⎤ ⎡qbx ⎤ ⎡ r11 qbx + r12 qby + r13 qbz + pabx ⎤ ⎡qax ⎤ paby ⎥ ⎢qby ⎥ ⎢r21 qbx + r22 qby + r23 qbz + paby ⎥ ⎢qay ⎥ ⎥⎢ ⎥ = ⎢ ⎥=⎢ ⎥ pabz ⎥ ⎢ qbz ⎥ ⎢ r31 qbx + r32 qby + r33 qbz + pabz ⎥ ⎢qaz ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 1 ⎦⎣ 1 ⎦ ⎣ 1 ⎦ ⎣1⎦
从1iizizx到izizxx沿1ixx测量的距离111到绕1i旋转的角度id到i沿iziz测量的距离i1ix到i绕旋转的角度zi1xi1yi1i1ai1ziyixiaidii4步骤原则先建立中间坐标系i后两端坐标系0n1确定z轴找出关节轴线及关节转向采用右手定则确定z2确定原点如果两相邻轴线zi与zi1不相交则公垂线与轴线i的交点为原点注意平行时原点的选择应使偏置为零如果相交则交点为原点注意如果重合则原点应使偏置为零3确定x轴两轴线不相交时x与公垂线重合指向从i到i1若两轴线相交则x是两轴线所成平面的法线xzizi1注意如果两轴线重合则x轴与轴线垂直且使其他连杆参数为零4按右手定则确定y5当第一个关节变量为零时规定0与1重合对于末端坐标系n原点与x任选希望坐标系n使杆参数尽量为零
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Proceedings of IDETC/CIE2005ASME2005International Design Engineering Technical Conferences&Computers and Information in Engineering ConferenceSeptember,24-28,2005,Long Beach,CaliforniaDETC2005-85460 A NOTE ON DENA VIT-HARTENBERG NOTATION IN ROBOTICSHARVEY LIPKINMechanical EngineeringGeorgia Institute of TechnologyAtlanta,GA30332-0405harvey.lipkin@ABSTRACTThe Denavit-Hartenberg conventions model chains of bodies connected by joints.Originally they were applied to single-loop chains but are now almost universally applied to open-loop se-rial chains such as robotic manipulators.Unfortunately there are several popular variations of the notation:the original,the distal variant,and the proximal variant.These three cases are compared for their application to serial robots.The proximal variate is advanced as the most notationally transparent for the mechanical analysis of serial manipulators.1INTRODUCTIONIt has been somefifty years since Jacques Denavit and Richard S.Hartenberg introduced the ubiquitous and cel-ebrated kinematic notation bearing their names,[Denavit and Hartenberg(1955)].Denavit-Hartenberg notation is used to model kinematic chains of bodies connected by joints.Originally they were applied to single-loop chains but are now almost universally applied to open-loop serial chains such as robotic manipulators.Unfortunately there are several popular variations of the notation:the original,the distal variant popularized by the textbook[Paul(1981)],and the proximal variant popularized by the textbook[Craig(1986)].Often times researchers and students are not aware of this multiplicity, and those who are,may not fully perceive the details of how they are related.The goal of this paper is to provide a detailed comparison of these three cases for their applica-tion to serial robots.As such,the paper develops no new notation and is primarily pedagogical;yet the author is un-aware of any such a comparison in the literature of this fundamental subject.Other notational variations are not considered which are substantially similar to these but use double subscripted indices.Further,the three presented cases do not preclude other distinct variants.The proximal variate is advanced as the most transparent notation for the mechanical analysis of serial manipulators.2TOPOLOGYA kinematic chain is a set of bodies connected by joints. The bodies are assumed rigid and are referred to as links. By convention,a joint imposes a kinematic constraint be-tween a pair of links.Thus,though many joints may be connected to a single link,exactly two links are connected to each joint.This suggests a unique labeling scheme:links are numbered0,1,2,...and joints are double numbered by the links they connect,01,12,....Figure1a shows an undirected graph representing a general chain where the links are represented by nodes and the joints are represented by lines.Single loop chains are simpler since every link is con-nected by exactly two joints,see Figure1b.The links are numbered and connected consecutively giving a directed graph.The previous double numbering of the joints can be replaced with single numbers by dropping,for example, thefirst number.Removing a joint opens the single loop into an open-loop serial chain with similar labeling.Proceedings of IDETC/CIE 2005ASME 2005 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference September 24-28, 2005, Long Beach, California USADETC2005-8546030a)2 0b)Figure1.a)Undirected graph of a general kinematic chain.b)Directed graph of an open-loop or single loop mechanism.3ORIGINAL DENA VIT-HARTENBERG NOTATION The Denavit-Hartenberg parameters describe the kine-matic model dimensions of a closed-loop or open-loop serial chain with one degree-of-freedom joints.The joints are as-sumed to be revolute or prismatic but can also be helical. Multiple degree-of-freedom joints are frequently modelled by combinations of single degree-of-freedom joints.To illustrate the original Denavit-Hartenberg conven-tions,Figure2reproduces a drawing from[Denavit and Hartenberg(1964)],with minor alterations,that shows a portion of a kinematic chain.That in turn is actually a line drawing of a physical model that was photographed and an-notated in[Denavit and Hartenberg(1955)].There are two links,labeled1and2,and three joints,shown as revolutes.For link2the joint axis directions are z1and z2.The common perpendicular line from z1to z2supplies the direc-tion x2to construct frame2fixed to the distal end of link 2,or its kinematic extension.(Distal and proximal refer to frame locations on the respective end and beginning of each link,in the sense of increasing link indices.)The common perpendicular distance is called the link length a1.Similarly,the common perpendicular line from z0to z1supplies the direction x1to construct frame1fixed to the distal end of link1.Joint offset d1is the distance be-tween the two common perpendicular lines measured along z1.Joint angleθ1is measured from x1to x2about z1.Twist angleα1is measured from z1to z2about x2and a negative angle is shown in thefigure.It is noted that d i has been substituted for the original joint offset notation s i since it is a frequent abbreviation for sinθi.Also the base has been designated as link0.The names link length,joint offset,and twist angle are not gen-erally used by Denavit and Hartenberg except for a i as a link length in reference to a planar linkage.The four Denavit-Hartenberg parameters (a1,α1,θ1,d1)can be expressed using vector forms whichFigure2.Original Denavit-Hartenberg convention.take into account the signs of the displacements,cosα1=z1·z2sinα1=z1×z2·x2cosθ1=x1·x2sinθ1=x1×x2·z1a1=−−−→O1O2·x2d1=−−−→O1O2·z1where−−−→O1O2is the vector from O1to O2.Frame1can be transformed into frame2by a screw-ing motion about the axis of z1by distance d1and angle θ1followed by a screwing motion about the axis of x2by distance a1and angleα1,B12=screw(θ1,d1,z1)·screw(α1,a1,x2)In terms of homogeneous transformation matrices this is B12=⎡⎢⎢⎣10000cosθ1−sinθ100sinθ1cosθ10d1001⎤⎥⎥⎦⎡⎢⎢⎣1000a110000cosα1−sinα100sinα1cosα1⎤⎥⎥⎦=⎡⎢⎢⎣1000a1cosθ1cosθ1−sinθ1cosα1sinθ1sinα1a1sinθ1sinθ1cosθ1cosα1−cosθ1sinα1d10sinα1cosα1⎤⎥⎥⎦This form assumes that for a 4×1array of position co-ordinates the first element is the homogeneous coordinate,[1x y z ]T ,and for consistency this is used throughout.An-other convention is to make the last element the homoge-neous coordinate.The four parameters,(a 1,α1,θ1,d 1)specify the loca-tion of frame 2relative to frame 1.Generally,six parame-ters are necessary to locate a frame with respect to another.However these frames are special since they have two inde-pendent conditions imposed on the axes of z 1and x 2:i )they intersect,and ii )they are perpendicular.Thus only 6−2=4independent parameters are necessary to locate an adjacent frame.It is interesting to note that [Denavit and Hartenberg (1955)]use a left-handed measurement for the twist angles αi though it is never stated explicitly.Indeed,in Figure 2if α1is measured left-handedly it is positive and if measured right-handedly it is negative.The homogeneous transfor-mation matrix is actually given asM 2=⎡⎢⎢⎣1000a 1cos θ1cos θ1−sin θ1cos α1−sin θ1sin α1a 1sin θ1sin θ1cos θ1cos α1cos θ1sin α1d 10sin α1cos α1⎤⎥⎥⎦and replacing α1by −α1yields back the right-handed B 12.(For consistency throughout the notation B 12is used rather than M 2.)In [Denavit and Hartenberg (1964)]this is changed to a purely right-handed system with the corre-sponding homogeneous transformation matrix given by B 12above.A successful notation balances clarity against concise-ness.Five subjective criteria are proposed to evaluate Denavit-Hartenberg notation and its variants for serial ro-bot analyses in displacement,velocity,statics,and dynam-ics.In order of importance the criteria are deemed as:1.Frame i is rigidly attached to link i .2.Displacements θi and d i are measured about z i .3.Displacements αi and a i are measured about x i .4.The first joint displacement is θ1or d 1.5.The ground is link 0.For the first criterion,a rigid frame is a very simple model for a rigid body.They are often used interchange-ably,such as forming the vector derivative with respect to an observer modelled as a frame or body.Since a link is modeled as a rigid body,a common frame/link index en-ables a single expression,in context,to be valid for two closely related interpretations.For the second criterion,the joint displacement and joint direction vector are often multiplied together such asin velocities,˙θi z i or ˙d i z i ,and accelerations,¨θi z i or ¨d i z i .An association of θi and d i with the axis of measurement z i establishes a uniform index structureFor the third criterion,the link length and direction are often multiplied together such as in expressions for position vectors,a i x i .An association of αi and a i with the axis of measurement x i also establishes a uniform index structure and diminishes introduction of index errors.For the fourth criterion,the joints are usually counted and labelled from base to tip as 1,2,...so it is notationally consistent that the first joint displacement has index 1.For the fifth criterion,the most the usual convention is that the robot base is designated as link 0.This is especially useful when the notation is adapted to several serial robots working together or in extending the modeling to the limbs of a parallel robot.The original Denavit-Hartenberg notation satis fies cri-teria 1and 2,violates criterion 3,and can exclusively sat-isfy either criteria 4or 5but not both simultaneously.If criterion 4is satis fied then θ1and d 1correspond to joint 1making link 1become the ground which violates criterion 5(z 0is not used).Otherwise,as shown in Figure 2,if cri-terion 5is satis fied then link 0is ground making θ1and d 1correspond to joint 2which violates criterion 4.4DISTAL VARIANTThe distal variant is currently the most popular form of the Denavit-Hartenberg notation found in the literature.The earliest references to the present form that the author is aware of occur in [Kahn (1969)],[Kahn (1970)],and [Kahn and Roth (1971)].Referring to Figure 3,the original parameters (a 1,α1,θ1,d 1)have been replaced by (a 2,α2,θ2,d 2)while the coordinate frame indices and the link indices remain the same.This makes the displacement about the second joint θ2or d 2and thus the displacements along the first joint axis are θ1and d 1so criterion 4is now satis fied.Since link 1is the first moving link then link 0can be selected as ground satisfying criterion 5.Criterion 1is maintained since frame i is still attached to link i .Criterion 3is now satis fied since αi and a i are now measured about x i .However criterion 2is now violated since θi and d i are now measured about z i −1.The four Denavit-Hartenberg parameters (a 2,α2,θ2,d 2)can be expressed using vector forms which take into account the signs of the displacements,cos α2=z 1·z 2sin α2=z 1×z 2·x 2Figure 3.Distal variant of Denavit-Hartenberg notation.cos θ2=x 1·x 2sin θ2=x 1×x 2·z 1a 2=−−−→O 1O 2·x 2d 2=−−−→O 1O 2·z 1Note that the right-hand sides of these equations are the same as for the original Denavit-Hartenberg notation but on the left-hand sides the index 2has replaced the index 1.Frame 1can be transformed into frame 2by a screw-ing motion about the axis of z 1by distance d 2and angle θ2followed by a screwing motion about the axis of x 2by distance a 2and angle α2,B 12=screw (θ2,d 2,z 1)·screw (α2,a 2,x 2)In terms of homogeneous transformation matrices this isB 12=⎡⎢⎢⎣10000cos θ2−sin θ200sin θ2cos θ20d 2001⎤⎥⎥⎦⎡⎢⎢⎣100a 20cos α2−sin α200sin α2cos α200001⎤⎥⎥⎦=⎡⎢⎢⎣1000a 2cos θ2cos θ2−sin θ2cos α2sin θ2sin α2a 2sin θ2sin θ2cos θ2cos α2−cos θ2sin α2d 20sin α2cos α2⎤⎥⎥⎦These are similar to the original forms except index 2hasreplaced index 1on the right-hand sides.5PROXIMAL VARIANTThe proximal variant is less widely found in present lit-erature than the distal variant but occurs more frequently than the original notation.The earliest references to the present form that the author is aware of occur in [Feather-stone (1982)],[Featherstone (1984)],[Featherstone (1987)].Referring to Figure 4,the link indices have been re-tained but the axes and frame notation are,by consequence,distinct from the distal cases.The i th joint in the chain is along z i .Frame i is attached to the proximal end of link i to satisfy criterion 1.Since the displacements θi and d i are measured about z i criterion 2is satis fied.Similarly dis-placements αi and a i are measured along x i so criterion 3is satis fied.Finally the first joint displacement is θ1or d 1so criterion 4is satis fied and the base is link 0so criterion 5is satis fied.Figure 4.Proximal variant of Denavit-Hartenberg notation.The four Denavit-Hartenberg parameters(a 1,α1,θ2,d 2)can be expressed using vector forms which take into account the signs of the displacements,cos α1=z 1·z 2sin α1=z 1×z 2·x 1cos θ2=x 1·x 2sin θ2=x 1×x 2·z 2a 2=−−−→O 1O 2·x 2d 2=−−−→O 1O 2·z 2Frame 1can be transformed into frame 2by a screw-ing motion about the axis of x 1by distance a 1and angle α1followed by a screwing motion about the axis of z 2by distance d 2and angle θ2,B 12=screw (α1,a 1,x 1)·screw (θ2,d 2,z 2)In terms of homogeneous transformation matrices this isB 12=⎡⎢⎢⎣1000a 110000cos α1−sin α100sin α1cos α1⎤⎥⎥⎦⎡⎢⎢⎣10000cos θ2−sin θ200sin θ2cos θ20d 2001⎤⎥⎥⎦=⎡⎢⎢⎣1000a 1cos θ2−sin θ20−d 2sin α1cos α1sin θ2cos α1cos θ2−sin α1d 2cos α1sin α1sin θ2sin α1cos θ2cos α1⎤⎥⎥⎦Unlike the original and the distal variant,each of thescrew displacements are about quantities with the same in-dex,(α1,a 1,x 1)and (θ2,d 2,z 2).Consequently,the trans-formation B 12between frames uses parameters with both 1and 2indices.6DISCUSSIONTable 1compares the properties of thethree notational conventions in general order of importance.All three have the desirable feature that frame i is attached to link i .The distal variant has the disadvantage that θi and d i are mea-sured along z i −1.It is the personal experience of the author that this is a source of frequent student errors since this part of the distal variant convention is notationally exceptional .An analogous exception arises for the original convention where αi and a i are measured along x i +1.For these reasons,the proximal conventions can be recommended as the most notationally transparent and the easiest to apply without undue attention.For the original conventions is not possible to simultane-ously have θ1,d 1measured along joint 1and designate link 0as the grounded link.It should however be noted that the original conventions were developed mainly for single loop mechanisms where it is common to number the links starting from 1.For the proximal variant,frame 0is not constrained lie on joint 1like the distal variant or the original convention when criterion 4is satis fied.However it is still necessaryTable parison of properties for the three notational conventions.⊕denotes mutually exclusive properties.that the x 0axis intersect and be perpendicular to the z 1axis.For an n link chain the distal cases (original and vari-ant)only require n +1frames to determine the all para-meters (a i ,αi ,θi ,d i )whereas the proximal variant typically uses an additional frame at the distal portion of link n to specify the parameters for this final link.These two features somewhat balance out each other.In forming the homogeneous transformation matrices both distal cases use the same index throughout,whereas the proximal case uses two indices.An interesting feature of the proximal and distal vari-ants is that a given chain will have the exact same para-meters (a i ,αi ,θi ,d i ),i =1...n if frame 0of the proximal variant is chosen to be the same as the distal variant.Finally it is noted that all of the Denavit-Hartenberg conventions have similar drawbacks for special geometries such as when consecutive joint axes are parallel.Then the parameters are no longer unique unless additional rules are added.This case can also cause robustness problems in cal-ibration situations where it is necessary to determine robot parameters from measuring a series of poses.A small devi-ation in the measurements can cause a large change in the parameters so sometimes other parameterizations are used such as the zero-reference position method,[Gupta (1997)].7REFERENCESCraig,J.J.,Introduction to Robotics-Mechanics and Control ,Addison-Wesley,Reading,MA,1986.Denavit,J.and Hartenberg,R.S.,“A kinematic notation for lower pair mechanisms based on matrices,”ASME Journal of Applied Mechanics ,vol.6,pp.215-221,1955Denavit,J.and Hartenberg,R.S.,Kinematic Synthesis of Link-ages ,McGraw-Hill,NY,1964.Featherstone,R.,“A program for simulating robot dynamics,”Working Paper 155,Dept.of AI,University of Edinburgh,1982.Featherstone,R.,Robot Dynamics Algorithms ,Ph.D.Disserta-tion,University of Edinburgh,1984.Featherstone,R.,Robot Dynamics Algorithms,Kluwer Academic Publishers,Boston,1986.Gupta,K.C.,Mechanics and Control of Robots,Spring-Verlag, NY,1997.Kahn,M.E.,“The near minimum-time control of open-loop ar-ticulated kinematic chains,”AI Memo106,Stanford Artificial Intelligence Laboratory,1969.Kahn,M.E.,The near minimum-time control of open-loop artic-ulated kinematic chains,183pp.,Ph.D.Dissertation,Stanford University,1970.Kahn,M.E.and Roth, B.,“The near minimum-time control of open-loop articulated kinematic chains,”ASME Journal of Dynamic Systems,Measurement,and Control,vol.6,pp.215-221,September1971.Paul,R.P.,Robot Manipulators Mathematics,Programming and Control,MIT Press,Cambridge,MA,1981.。