基于Arduino开发模块的3D打印机驱动装置研制
基于Arduino桌面级折叠3D打印机的设计

基于Arduino桌面级折叠3D打印机的设计
程伟;李向阳;戴俊平;陈蒙蒙
【期刊名称】《机械研究与应用》
【年(卷),期】2016(29)4
【摘要】结合3D打印机的发展趋势并针对创新制作和教学的使用需要,设计了一种基于Arduino的桌面级折叠3D打印机。
具体介绍了打印机控制系统和机械结构的设计方案和内容。
该打印机结构简单紧凑,具有小型化、便携化、成本低的特点。
【总页数】3页(P97-99)
【关键词】Arduino;3D打印机;小型;便携
【作者】程伟;李向阳;戴俊平;陈蒙蒙
【作者单位】陕西理工大学机械工程训练中心;陕西理工大学机械工程学院
【正文语种】中文
【中图分类】TP334.8
【相关文献】
1.国产桌面级3D打印机设计评价r——以FDM式3D打印机为例 [J], 郑鲲
2.基于嵌入式Linux的桌面级DLP型3D打印机设计 [J], 赵炯;于学海;杨天豪;周高杨;凌浩;徐强
3.用桌面级3D打印机和Arduino设计制作洗鞋机 [J], 刘丰
4.基于MarIin固件桌面级3D打印机自动调平装置设计 [J], 宗殿栋;汪地;李卫成;
姜海龙;刘谋玉
5.基于FDM工艺的桌面级3D打印机的设计 [J], 施绍宁;艾致祥;庞学林
因版权原因,仅展示原文概要,查看原文内容请购买。
基于AVR单片机的模块化3D打印装置设计

基于AVR单片机的模块化3D打印装置设计
基于AVR单片机的模块化3D打印装置设计
何义波,吴志东,李东军,郝鹏,李镇洵,郭新龙,朱宇航,万宝辉
【摘要】对现有的3D打印机进行改造研究,在原有的3D打印机的基础上加入模块化的设计,使3D打印功能保持不变但结构更加简单,操作更加便捷。
文章叙述了基于AVR单片机的模块化3D打印机的构成和工作原理以及设备特性。
【期刊名称】时代农机
【年(卷),期】2017(000)009
【总页数】2
【关键词】AVR单片机;模块化;3D打印机
当前,3D打印装置仍然成为一种趋势,3D打印装置已经应用于许多科学领域中,尤其在数码产品开模等方面有很大帮助,可以在几个小时以内完成模具的印刷,大量的节省产品在市场开发的时间。
文章所介绍的3D打印机更具有体积小巧、操作简单、易于拆卸拼装等优点,可以减少对人的技术依赖方便操作、减少经济支出。
1 系统总体构成
3D打印机系统主要由主控制系统、电机驱动系统及上位机指令传输系统构成,其中主控系统采用了Arduino Mega 2560微控制器作为控制核心控制整个打印装置完成特定动作,打印特定文件等。
3D打印装置分为两大部分,分别是机械部分和电气部分。
机械部分包括传动部分,电动机,同步带以及带轮;电气部分包括AVR单片机控制电路的电路板。
这两部分结合成为3D打印装置,使得3D打印装置可以实现X、Y、Z三轴移动,以及人为自由远程控制3D打印,。
基于Arduino模块化小型3D打印机的设计
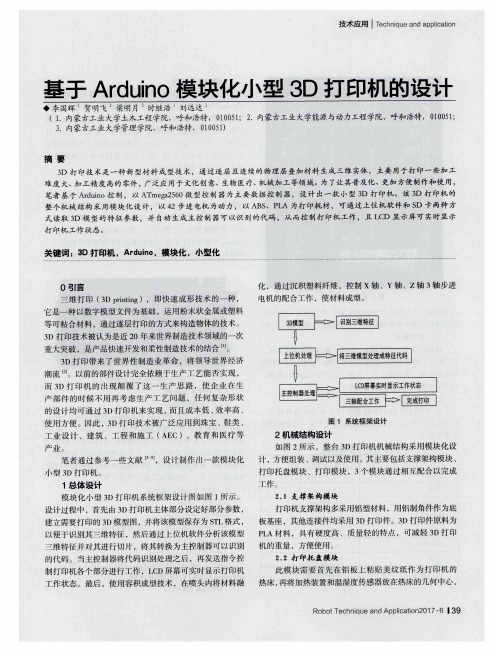
整个 机械 结 构 采 用模 块化 设 计 , 以 4 2步进 电机 为动 力 , 以 A B S 、P I A 为打 印耗材 ,可 通过 上位 机 软件 和 S D 卡 两种 方
式读取 3 D 模 型 的特征 参数 ,并 自动 生成 主控 制 器 可 以识 别 的代码 ,从 而控 制 打 印机工 作 ,且 L C D 显 示 屏可 实 时显 示
打 印机 工作 状 态。
关键 词 :3 D打 印机 ,A r d u i n o ,模块化 ,小型化
0 引 言
化 .通 过 沉积 塑 料纤 维 ,控 制 X轴 、Y轴 、z轴 3 轴步 进 电机 的配 合工 作 ,使材 料成 型 。
行进 路 干 ¨ 挤… t 丝} l ,整 个 打 印进 I 1 1 I 『 C I ) 牡【
技 术 应 用
3控 制 方 案 设 计
本 义介 绍 的 3 1 ) 打 印机 摹 于 A l - { l u i n o核 心 控 制 ,以 川' i n P /  ̄ H 2 5 6 0做 J I I 』 控 制 作 为主 要控 制 器 , f I 1_ 、 r I h l i n o 制 板 酣 底 J , t 小 川结 卡 句,A T me g a 2 5 6 0微 圳 披 收输 入 没 箭的 数 . i 史 取3 I )模 的特 参数 ,j i : 以此 进 行 分析 、分 、切” J i 动生 成卡 I H 的代码 ,从而] ' l d t i 0 喷
笔者通过参考一些文献 1 3 - 5 1 ,设计制作 } f I 一款模块化
基于Arduino的并联FDM式3D打印机的软硬件实现
( 深圳 技师学 院 , 广东 深圳 5 1 8 0 2 6 )
摘
要 : 本文 以基于 a r d u i n o的 3 D打印机实现为例 , 详细介绍 了设 计框架模 块、软硬 件及编程 。
关键 词 : a r d u i n o I 3 D打 印机 ; me g a 2 5 6 0 ; 嵌 入式开发 中图分类号 : T P 3 3 4 . 8 文献标识码 : A 文章编号 : 1 0 0 3 — 7 2 4 1 ( 2 0 1 7 ) 0 6 — 0 1 5 8 — 0 5
链( c h a i n ) 将运 动的动平台 ( p l a t f o r m) 与固定平台 ( b a s e )
相 联 接 。从 而从理 论 上 保证 了这 六个 分 支 的 自由摆 放 度 , 每 个分支 由唯一的驱动控 制器驱 动。运动平 台的运
动 是通过这 六个分支 的可驱动杆件 的伸缩来实 现的 , 它
自 动 化 技 术 与 应 用 》 2 0 1 7 年 第3 6 卷 第 6 期
行 业 应 用 与 交 流
n du s t n a l Ap p l i c a t i o n s an d COmmun i c a t I O n s
基于 A r d u i n o的并联 F D M式 3 D打印机 的软硬 件实现
l 引言
3 D 打 印机 已经 成为 目前 创客 的必备 工具 , 在 自动 化 领域也越 来越有取 代传统开 模的趋 势。而且 随着 互联 网 +及 OTT的浸入 , 3 D打 印机 已经成为最后一 公里实 物 化的重 要工具 。除了可 以拓展 应用于传 统 的个性 化定 制领域 , 更可 以衍生 出 “ 可 以生机器 ”的机器概念 。 本 文 旨在研 究提 供 了一种 3 D打 印机实 现方 案 , 从
基于Arduino的3D打印机控制系统硬件设计

0引言随着计算机技术的飞速发展,CAD/CAM技术得到广泛应用,产品制造和设计过程发生巨大改变,开发周期、更新周期越来越短,3D打印技术也在蓬勃发展。
同时,随着人们对DIY需求的不断提高,对桌面3D打印机的要求越来越高,要求在保证精度的基础上,价格更便宜。
桌面级设备市场,没有特别有代表性的企业,桌面级设备拥有Prusai3、Kossel、Corexy等多种类型,市场较混乱,各个企业质量参差不齐。
本文针对桌面3D打印机,分析常用硬件组成单元优缺点,降低桌面3D打印机控制系统硬件成本使更多人可以完成日常DIY的需求。
1桌面3D打印机工作原理DIY工作者通过计算机软件设计三维CAD模型,由计算机对于需要打印的三维模型进行切片处理,工作者设置打印速度、生成G代码。
Arduino通过固件和G代码,控制三个方向的步进电机进行运动,控制喷头走出切片所描述的运动轨迹,层层堆叠,打印出所设计的3D构件流程如图1所示。
图1桌面3D打印机工作示意图DIY工作者可对成型件进行去支撑、打磨、抛光等处理,以提高成型件的质量。
2主控模块选择桌面级3D打印机常用控制单元有51单片机、Arduino、MSP430等芯片,各芯片的优缺点以及特点,如表1所示。
控制单元优点缺点Arduino1.面向创意器件,研发成本低。
2.可运行操作系统,进行更复杂的数据运算。
不适于用于工业场合,定时器灵活度较低。
51单片机1.上手简单,可以直接进行位运算。
2.价格便宜,使用广泛。
1.AD、EEPROM等功能需扩展,增加了硬件和软件负担。
2.运行与计算速度较慢。
MSP4301.处理能力强,采用精简指令集,程序效率高;运算速度高。
2.超低功耗。
占用指令空间较大,部分指令需占用6个字节。
表1———————————————————————作者简介:王泽平(1998-),男,山东烟台人,本科生在读,从事机械电子工程研究。
表28结束语本人很荣幸参与双立柱皮带升降机设计,并取得成功;采用皮带式升降机,能很好的实现现代焊装线输送对高节拍的要求。
基于Arduino系统的一种人机交互条码打印装置的设计

基于Arduino系统的一种人机交互条码打印装置的设计李麒;赵寒涛;陈庆文
【期刊名称】《自动化技术与应用》
【年(卷),期】2016(035)007
【摘要】本文以Arduino控制板为核心设计了一种人机交互条码打印装置,该装置主要由触摸屏和条码打印机组成,能够在不同的应用场合与其他自控设备配套使用,建立相关的人机交互界面并根据实际需求打印标签、条码,以提高设备的整体附加值.
【总页数】4页(P157-160)
【作者】李麒;赵寒涛;陈庆文
【作者单位】黑龙江省科学院自动化研究所,黑龙江哈尔滨150090;黑龙江省科学院高技术研究院,黑龙江哈尔滨150020;黑龙江省科学院自动化研究所,黑龙江哈尔滨150090;黑龙江省科学院高技术研究院,黑龙江哈尔滨150020;黑龙江省科学院自动化研究所,黑龙江哈尔滨150090
【正文语种】中文
【中图分类】TP23
【相关文献】
1.基于Arduino系统的一种气调保鲜比例混合装置的设计 [J], 李麒;赵寒涛;董莘;白广利
2.基于普通打印机的128条码标签打印系统设计 [J], 刘力真
3.基于Arduino的3D打印机控制系统硬件设计 [J], 王泽平
4.基于Arduino的3D打印机控制系统硬件设计 [J], 王泽平
5.一种基于装置打印接口的继电保护装置保护定值自动核对系统设计 [J], 罗婉儿; 李明达; 颜广兴
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Arduino的3D打印机设计开发
基于Arduino的3D打印机设计开发倪笑宇;寇逸伦;刘春东;张灿果;张海东【摘要】针对基于熔融挤出成型(FDM)工艺原理的桌面级3D打印机进行设计开发,主要涉及delta型3D打印机机械结构的设计,Arduino软硬件控制平台的构建与开发等.通过对原理样机进行试验,结果表明该3D打印机运行良好,打印快速,精度较高.【期刊名称】《河北建筑工程学院学报》【年(卷),期】2019(037)001【总页数】4页(P141-144)【关键词】FDM;并联臂架构;Arduino;G代码【作者】倪笑宇;寇逸伦;刘春东;张灿果;张海东【作者单位】河北建筑工程学院,河北张家口 075000;领克汽车张家口工厂,河北张家口 075000;河北建筑工程学院,河北张家口 075000;河北建筑工程学院,河北张家口 075000;河北建筑工程学院,河北张家口 075000【正文语种】中文【中图分类】TH60 前言3D打印是一种快速成形技术,它以数字三维模型为基础,将金属粉末或ABS、PLA等塑料,通过逐层打印的方式将物体成型[1].该制造工艺较为新颖,甚至被认为是“第三次工业革命的重要生产工具”.FDM熔融沉积快速成型技术,是将丝状热熔性材料加热融化,通过带有一个微细喷嘴的喷头挤喷出来,沉积在制作面板或者前一层已固化的材料上,温度低于固化温度后开始固化,通过材料的层层堆积形成最终成品[2].本文设计开发的delta型桌面级FDM-3D打印机,具有结构简单、承载能力强、控制性好、代码开源、精度高、速度快等优点.1 Delta 3D打印机的整体方案设计1.1 结构设计图1 delta型3D打印机结构Delta即为并联式结构,其应用可分为两大类,一种是工业上用的并联式机器人;另外一种是打印机的运动结构[3].本文设计的Delta 3D打印机就是一种三臂并联式运动结构的打印机,所使用的并联机构是基于外副驱动设计,使动平台通过3个相同的连杆与定平台相联接,三组平行连杆成120度均布在动平台与定平台之间,且动平台与定平台之间存在180 mm装配距离.打印机采用T2020系列铝型材.滑块与导轨间采用滑轮,滑块在导轨上滑动平稳,噪音低,连杆的作用是连接打印喷头和滑块,牵引喷头动作.连杆的两端与强磁球形磁铁相接,依靠强力磁铁吸合,其一端与滑块相连,另一端与挤出头支架相连.导轨的下端安装有三台步进电机,通过同步带将电机的旋转运动转换为滑块的直线运动,依靠连杆的连接,滑块在上下运动的过程中,实现对喷头位置的控制,结构如图1所示.1.2 控制系统本文设计开发的3D打印机控制系统采用上位机与下位机联合的方式进行工作.上位机即PC机将零件的轮廓转换成打印头的位置信息,并通过界面对下位机传递各个控制参数,同时接收下位机传递回来的监测信息.下位机即单片机工作时,接收由上位机传递过来的信号,并通过脉冲输出实时控制步进电机工作,从而控制打印头的位置[4].单片机的控制软件采用的是基于Arduino的编程语言.2 Delta 3D打印机的硬件系统2.1 步进电机驱动模块A4988此款3D打印机其打印过程主要通过X塔,Y塔和Z塔的协同工作来完成.控制三个坐标塔的运动主要通过步进电机实现.本设计步进电机的驱动模块为A4988,其典型应用电路如图2所示[5].VMOT引脚引入8-15 V直流电源,用于给步进电机提供电能,VDD引脚引入3-5.5V电源给芯片供电.图2 A4988典型应用电路2.2 Arduino Mega2560控制电路板及RAMPS1.4扩展电路板Arduino Mega2560是采用USB接口的核心电路板,如图3所示.处理器核心为ATmega2560,它是3D打印机控制系统的核心.编写好的软件程序需要下载到ATmega2560芯片中.RAMPS1.4扩展板的设计机理是在一个小尺寸电路板上集成打印机所需的所有电路接口,是一块接口拓展平台.RAMPS1.4连接强大的Arduino MEGA平台,并拥有充足的扩展空间,如图4所示.图3 Arduino控制板图4 RAMPS扩展板3 运动编程关键参数与运动坐标转换在打印机喷头运动编程之前,需要确定3D打印机的关键参数并进行坐标系的转换.3.1 delta 3D打印机运动编程的关键参数Delta型打印机的主要参数:推杆的长度【1】,电机轴上滑块的宽度、电机轴圆半径【2】,装喷头的平台中心到杆连接处的距离【3】,还有电机轴滑块的距离【4】.通过利用两次勾股定理,即可由相关参数求出打印机喷头的世界坐标.关键尺寸如图5所示.3.2 世界坐标和电机轴坐标之间的转换XYZ轴和的相对位置关系如图6所示.如果已知起点A坐标和终点B坐标后,仅得到的是世界坐标系下的坐标,为了让喷头从A点移动到B点,需要将世界坐标(XYZ轴)转换为电机轴坐标(XYZ塔),该算法是Delta机型和普通打印机最大的不同之处.其余部分代码则有很强的通用性.图5 关键尺寸示意图图6 XYZ轴与XYZ塔的相对位置关系4 系统固件与运动编程系统固件是系统的控制代码,是整个打印机系统的软件核心.用于控制打印头的移动,遵守NISTRS274NGCG-code标准,因此该固件也可以同时用于CNC机床(或类似)的控制.固件的设计思路是:参照G代码标准中定义的运动形式,利用C 语言编程实现这些运动形式.固件中各个G代码以结构体指针的形式作为标签,随时可以被检索.现就固件的主体函数和打印机喷头的运动函数进行分析:4.1 process_command()函数Void loop (){ Get_command() ; //从sd卡获取GcodeProcess_command();//解析Gcode并执行代码Manage_heater();//控制机器喷头和热床温度Manage_inactivity();//非运动状态checkHitEndstops();//检查endstop的状态Lcd_update();//更新lcd上面的信息 }在这个过程中,process_command()是控制的核心.它负责将读取到的Gcode代码进行编译解析,并产生出相应的控制指令.process_command()就是一个巨大的case结构,G1命令的大致逻辑为:首先根据结构体指针检索到G1对应的C代码,当代码检测到滑车没有到达最顶端,即没有接触到行程开关时,执行函数get_coordinates(),即读取现有位置的坐标,该坐标为打印件的世界坐标,需要将其转换为电机轴坐标.接着计算目标坐标和现有坐标之间的直线距离,那么三个电机空中移动的距离就算出来了,接着就可以通过函数perpare_move()来控制电机移动.4.2 prepare_move()函数该函数是驱动步进电机运动的函数,为了理解它,首先明确几个变量:Difference[i]数组:用来储存目标坐标和当前坐标之间的距离;Destination[i]数组:目标坐标的数值,从process_command()函数中G1读取X、Y、Z、E参数获取;Current_position[i]数组:当前坐标的数值,从G1命令get_coordinates()函数中传递过来(若3个轴都归零,则Current_position储存的就是三个坐标原点,若开始运动,存储的值就是上一个prepare_move()循环执行后上一次的Destination[i]的值);cartesian[i]数组:用于存放插值化简后的打印件世界坐标;Delta[i]数组:用于存放打印机xyz三个电机要移动的距离,即在XYZ塔上的相对高度.calculate_Delta()函数,其主要功能是将打印机的世界坐标转换为三个电机轴的运动坐标.图7 原理样机prepare_move()函数使用数控机床中常见的直线插补方法控制喷头移动.对于普通结构打印机,G1每次将新读取的Gcode代码参数传递给prepare_move()函数中的destination[i]数组以后,prepare_move()就会将其传递到它的子函数plan_buffer_line()中进行电机的运动.而Delta结构打印机相对复杂,G1命令读取了Gcode代码参数后也是传递到prepare_move()函数中的destination[i],然后固件要计算目标坐标与当前坐标的笛卡尔距离,通过固定时间间隔的方式来将笛卡尔距离分成若干个小直线,存放在cartesian[i]数组中,相当于数控加工中的直线拟合处理,这种方式减少了CPU的浮点计算量,然后再通过calculate_Delta[i]函数将简化后的打印件世界坐标cartesian[i]换算成三个电机轴的运动坐标.由于之前已经得到目标坐标以及XYZ轴的变化量坐标,prepare_move()可得出各个电机轴需要旋转的次数,已知旋转次数就可以让程序驱动步进电机运动了,并将转换后的三个电机轴的运动坐标传递到Delta[i]中,然后执行prepare_move()函数中的子函数plan_buffer_line(),使电机运转起来,到达打印件目标位置.5 结论本文针对FDM技术的桌面级3D打印机进行设计开发,主要包括机械结构、控制电路和系统软件等部分,开发出一款基于Arduino的delta型3D打印机,原理样机如图7所示.该3D打印机具有结构简单、承载能力强、控制性好、代码开源等优点,可缩短打印时间,提高打印精度.参考文献【相关文献】[1]牛晰.桌面3D打印机结构分析及机体设计研究[J].设计.2015,(4):92~94[2]阴贺生,赵文豪,等.基于三臂并联结构的桌面3D打印机[J].机械.2015,(2):34~36[3]王承义.机械手及其应用[M].北京:机械工业出版社,2011.6[4]廖晓钟,刘向东.控制系统分析与设计[M].北京:清华大学出版社,2008.10[5]谭秀腾,郭小定,等.基于ARM的桌面型3D打印机控制系统设计[J].应用科技.2014,(5):57~61。
基于arduino的fdm型3d打印机设计与应用
• 126•本文阐述中一款工业用3D 打印机的设计制作过程。
首先对不同框架结构打印机进行了性能上的对比,选取了一款打印速度高成本低的方案进行开发;然后详细阐述了硬件实现功能及选型,固件的介绍和配置;最后阐述了如何提高数字模型切片质量的一些控制要点。
0 引言3D 打印作为一种新兴的快速成形技术,近年来正在不断的快速发展。
之所以称其为3D 打印,是因为它通过逐层构建的方式,在打印平台上将数字模型转换为实物。
3D 打印技术的大规模应用,完全颠覆了传统的生产方式,节省了大量繁琐的环节,为互联网背景下的产品快速迭代提供了相当大的便利。
常见的3D 打印类型如下:FDM 型,通过熔融沉积快速成型,主要材料为ABS 和PLA ;SLA 型,光固化成型,主要材料为光敏树脂;3DP 型,三维粉末粘接,主要材料为粉末材料,如陶瓷粉末、金属粉末、塑料粉末;SLS 型,选择性激光烧结,主要材料为粉末材料。
工业领域塑胶类手板制作常用第一种和第二种,本文以FDM 型3D 打印机设计制作过程为例进行简要阐述(张楠,李飞,3D 打印技术的发展与应用对未来产品设计的影响[J].机械设计,2013,30(07):97-99;张曼,3D 打印技术及其应用发展研究[J].电子世界,2013(13):7-8)。
1 打印机的设计制作一款高精度3D 打印机的设计制作,驶平台类似。
其喷头移动灵活,也是唯一可以快速进行喷头抬升的结构,其喷头重量轻,打印速度快。
但其底座一般为三角形,打印平台为圆形,所以内部空间利用率较低,并且实际使用中打印平台调平尤为困难,如图1右所示。
图1 Prusa i3结构(左)和并联臂Kossel结构(右)Corexy 结构:电机同样固定于外壳上,通过两根皮带控制喷头运动,X 轴和Y 轴移动均是通过两电机共同运作,如图2所示,其打印速度高,成本较低,得到了众多电子爱好者和生产厂商的青睐。
图2 Corexy结构控制方式FDM 型3D 打印机其走料路径如图3所示,首先经过挤出机,通过挤出机上的步进电机控制进料长度。
基于Arduino的3D打印机热床自平衡调节设计
基于Arduino的3D打印机热床自平衡调节设计作者:王淼军韦海成肖明霞魏鑫来源:《现代电子技术》2017年第12期摘要:针对3D打印机热床人工手动调节步骤繁琐及精度低的问题,提出一种自动平衡调节的方法,并设计了调平装置。
此调平装置以Arduino mega 2560为主控模块,使用步进电机作为调平动作单元,结合螺杆传动,实现打印机热床平台的平衡调节;使用接触式限位开关,实现热床平台下降原点的定位;通过测试的方法编写校正路径程序,以模拟打印的方式实现3D打印设备与调平装置的协同工作。
实验表明,采用的细分驱动可实现步距角为0.112 5°微调,大大提高了3D打印机热床平衡调节的精度;使用双重滤波的方法实现了通信脉冲序列的有效计数,并从软件层面解决了步进电机的抖动问题。
关键词: Arduino;自平衡;步进电机;细分驱动中图分类号: TN305.94⁃34 文献标识码: A 文章编号: 1004⁃373X(2017)12⁃0108⁃05Abstract: Aiming at the problems of tedious step and low accuracy of the hot bed mannual regulation for 3D printer, a autobalance regulation method is proposed, and a leveling device is designed. In order to realize the balance regulation of hot bed platform of the printer, the Arduino mega2560 is taken as main⁃control module of the leveling device, and the stepping motor is used as the leveling action unit in combination with screw drive. The contact⁃type limit switch is used to locate the descending origin of the hot bed platform. The test method is adopted to compile the path correct procedure to realize the cooperative work between 3D printing equipment and leveling device in the manner of simulation print. The experimental results show that the subdivision driving can realize the fine tuning with 0.1125° step angle, improve the regulation accuracy of hot bed balance of 3D printer greatly. Effective count of the communication pulse sequence was realized with the dual⁃filtering method, and the vibration problem of the stepper motor was solved with software .Keywords: Arduino; self⁃balance; stepping motor; subdivision driving0 引言3D打印技术越来越受到人们的重视,被广泛应用于加工制造、航空航天、医疗修复、教育科研等相关领域[1⁃4]。
基于Arduino的开源3D打印平台系统设计与开发
基于Arduino的开源3D打印平台系统设计与开发邱海飞;何晋威;贾振南;欧龙【摘要】以当前主流电子原型平台Arduino为开发环境,针对开源3D打印机进行系统设计与开发.确定了一种开源3D打印设备的工作链、软硬件布局及电气控制系统构成,在Arduino平台上构建了该设备的机、电、热集成开发环境,并设计了数字化样机模型.借助工业级3D打印机制造关键零部件和非标件,通过分部组装成功研制了等比例物理样机,在此基础上实现了Marlin固件的编译、烧刻以及样机校准与系统调试.探索并明确了开源3D打印平台的一体化开发流程和实现方法,为开源3D打印技术的应用、创新及推广提供了重要支持.%The system of open-source 3D printer is designed and developed which make Arduino that a mainstream electronic prototype platform currently as development environment. The work chain, layout of soft hardware and constitution of electric control system for an open-source 3D printing equipment are confirmed, and integrated development environment of machine, electricity and heat for the equipment is built on the Arduino platform, besides, its digital prototype model is also designed. Some key parts and non-standard parts are made in virtue of industrial-grade 3D printer, and an equal proportion physical prototype is developed successfully through subassembly, and then Marlin firmware compile, burning, prototype adjusting and system debugging are realized. In results, development process and implement method of the open-source 3D printing platform are explored and understood, thus then an important support is providedfor application, innovation and promotion of open-source 3D printing technology.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)009【总页数】4页(P232-235)【关键词】3D打印;系统开发;开源;样机;平台;Marlin固件;Arduino【作者】邱海飞;何晋威;贾振南;欧龙【作者单位】西京学院机械工程学院,陕西西安 710123;西京学院机械工程学院,陕西西安 710123;西京学院机械工程学院,陕西西安 710123;西京学院机械工程学院,陕西西安 710123【正文语种】中文【中图分类】TH16;TP2723D打印技术是一项集光、机、电、计算机、控制及新材料于一体的先进制造技术[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Arduino开发模块的3D打印机驱动装置研制
作者:李响
来源:《电子技术与软件工程》2017年第06期
针对3D打印的基本需求,设计了基于开源开发系统设计了打印机硬件驱动装置,提出了3D打印机驱动装置设计方案。
该方案基于开源的Arduino开发模块,利用单片机
ATMEGA328P-PU读取三维扫描数据进而驱动步进电机进行精确步伐控制,再由核心控制器将需要打印的位置上留下热容的打印材料并迅速冷凝定型。
经实验系统误差已达到毫米级,可以满足打印需求。
【关键词】3D打印驱动系统结构设计
3D打印是一种新型的基于数据模型的逐层打印速成技术,具有定制化程度高,打印成本低,成型速度快等特点。
该技术是利用加热装置将耗材融化,再利用上位机驱动电机移动喷头在相应位置将其喷出堆积并迅速凝固。
经过数据分析并层层扫描融化堆积,可以制造出虚拟产品,根据客户需求及其三维数据修正,即可生成个性化产品。
当前3D打印处于飞速发展阶段,势必对传统工业造成冲击,它变革了传统制造工业中的机械加工和模具制造,直接可以用远程数据库中数据生成任何形状物体并通过驱动电机在特定点喷射加热的成型材料打印成型。
这种方式极大地缩短了产品的生产周期,特别适合于产品创新、个性产品设计、医疗产品及艺术创作等,具有巨大的市场前景有效提高了生产率,具有制造工序简洁、生产周期短,效率高成本低等优点。
本文针对目前日益增长的个性化3D打印装置进行设计,扭转了以往产高成本的不利因素,设计了3D打印机驱动装置设计方案。
该方案基于开源的Arduino开发模块,利用单片机ATMEGA328P-PU读取三维扫描数据进而驱动步进电机进行精确步伐控制,并通过打印喷头进行打印,经过实验,本装置精度达毫米级。
1 3D打印机的工作原理
3D打印机又称为三维打印机,是一种累积材料为基础的制造快速成型技术,即快速成形技术的一种机器。
3D打印机的原理是把数据和原料放进3D打印机中,通过数字模型文件运用特殊材料、粉末状金属或塑料等可粘合材料,打印一层层的粘合材料来制造三维物体。
3D打印系统由控制端及3D打印机两部分组成;其控制端具有对数据模型的格式转换、处理及输出控制指令等功能。
上位机工作流程见图1。
为了保证3D打印的顺利进行,需要确定数据模型的大小是否在打印机的工作范围内,如果超出了打印机的最大工作范围,需要进行调整。
本项目利用3D slic3r软件将数据模型进行逐层切片处理,将其转换为打印机可以识别的Gcode指令代码,打印机接收代码顺序执行之后便可以将数据模型实体化。
2 3D打印控制系统硬件设计
3D打印机控制系统是整个打印系统的核心,由无线数据传输模块,主控模块,步进电机驱动模块,3D打印喷头控制模块等组成。
有控制系统完成对指令的解析,控制协调整个系统的工作及对主控端的反馈。
其硬件框图见图2。
本方案采用开源的Arduino开发模块作为主控模块,将控制程序greb烧录入芯片中,负责解析控制代码并与各个模块协同工作完成打印任务;步进电机驱动系统负责驱动步进电机根据指令完成工作;蓝牙传输模块负责打印控制系统与主控端之间的数据与指令传输;3D打印喷头控制模块负责控制3D打印喷头开关及挤出速率;供电模块负责整个系统稳定的供电。
其中包含:
(1)蓝牙无线传输模块。
主控端与3D打印机之间传输指令时,为提高传输效率与方便性,添加了蓝牙无线传输模块,以实现数据无线传输功能。
本项目采用FBT06型号的蓝牙模块,进行匹配后便可以通过串口通讯进行主控端与3D打印控制系统之间的无缝数据连接。
(2)步进电机驱动模块。
为了实现喷头在三维坐标内的准确移动,本系统采用三个步进电机驱动构成X、Y、Z三维坐标系,由主控芯片及步进电机驱动系统完成控制。
本系统采用TB6600步进电机驱动芯片实现对步进电机的控制,本项目采用了步进电机的共阴极接法。
(3)Quectel EC20 4G模块。
通过添加4G通信模块,使得主控芯片可以通过4G移动网络与服务器进行数据交换,来达到数据指令远程传输的目的。
本项目的3D打印机机械系统由步进电机及其支撑结构,3D打印喷头,打印基座等组成。
通过支撑结构在三维平面内建立一个120mm×120mm×120mm的三维坐标系,通过三个步进电机驱动带动喷头及打印基座在三维平面内的移动,从而使3D打印喷头及基座完成相对移动,完成打印工作。
3D打印喷头将热熔的3D打印材料匀速挤出,三个步进电机驱动完成与基座的相对移动。
按照原理,设计好的实物图如图3所示:左侧为打印笔,右侧为控制电路,当打印启动时,控制电路通过步进电机控制打印笔的移动方向,在所需要的位置上融化打印耗材并迅速凝固成型。
3 打印精度系统测试
为了测试本装置的稳定性,通过实验进行测试。
打印笔打印其走行轨迹剖面图如图4所示,其中红色线代表需要打印成型,而蓝色线代表抬笔不打印。
按照设定好的模型,测试其数据的准确程度,如表1所示,其中打印笔信号分为0(工作信号)、3(启动信号)、5(停止信号);喷涂材料为1表示此点位打印材料输出;X、Y、Z 表示移动三维坐标;移动速度表示步进电机传动喷头的工作速率。
本装置误差主要来源于X、Y、Z坐标动轴,由于步进电机驱动时,采用螺旋推进结构的动轴旋差较大,以致产生驱动误差,其中X轴为平均0.113mm,Y轴平均误差为0.2mm,均在毫米级。
4 结论
针对3D打印的基本需求,本文设计了基于开源的Arduino开发模块的打印机硬件驱动装置,提出了3D打印机驱动装置设计方案。
利用单片机ATMEGA328P-PU读取三维扫描数据进而驱动步进电机进行精确步伐控制,再由核心控制器将需要打印的位置上留下热容的打印材料并迅速冷凝定型。
经实验系统误差已达到毫米级,可以满足打印需求。
(通讯作者:何东钢)
参考文献
[1]郭日阳.3D打印技术及产业前景[J].自动化仪表,2015(03):5-8.
[2]李福平,邓春林,万晶.3D打印建筑技术与商品混凝土行业展望[J].混凝土世界,2013(03):28-29.
[3]石静,钟玉敏.组织工程中3D生物打印技术的应用[J].中国组织工程研究,2014(02):271-276.
[4]成思源,周小东,杨雪荣,张湘伟,郭钟宁.基于3D打印技术的实验教学[J].实验室研究与探索,2015(08):158-161.
[5]郭遵站.小型3D打印技术研究[D].长春:长春理工大学,2014.
[6]李双飞.三维打印网络监控系统研究与开发[D].杭州:浙江大学,2016.
[7]肖遥.基于Arduino的机电控制CAI系统开发[D].杭州:浙江理工大学,2016.
[8]赵洪河,陆宏谦.基于Arduino的步进电机分析与设计[J].智能机器人,2016(06):42-45
[9]成思源,周小东,杨雪荣,张湘伟,郭钟宁.基于数字化逆向建模的3D打印实验教学[J].实验技术与管理,2015(01):30-33.
[10]杨亮,傅瑜,邓春健,宋喜佳.基于嵌入式平台3D打印机研制[J].实验技术与管理,2015(12):89-92.
作者简介
李响(1983-),男,辽宁省沈阳市人。
硕士学位。
现为大连海洋大学信息工程学院讲师,主要从事电子电路设计与检测。
何东钢(1972-),女,辽宁省大连市人。
硕士学位。
现为大连海洋大学信息工程学院高级实验师,主要从事计算机控制设计。
作者单位
大连海洋大学信息工程学院辽宁省大连市 116023。