四旋翼无人直升机建模与控制理论研究
四旋翼飞行器动力学建模与控制技术研究
四旋翼飞行器动力学建模与控制技术研究随着无人机技术的不断发展,四旋翼飞行器已经成为了无人机市场中的一种重要机型。
四旋翼飞行器由于其体积小、操作灵活、便携性强等特点,被广泛应用于农业、地质勘探、安防、航拍等领域。
然而,四旋翼飞行器的稳定性及控制问题一直是制约其广泛应用的关键性技术之一。
因此,本文将探究四旋翼飞行器动力学建模及控制技术的研究现状和趋势。
一、四旋翼飞行器动力学建模四旋翼飞行器的动力学模型一般包括四个方程,分别是运动学方程、动力学方程、气动平衡方程以及电机方程。
首先,运动学方程是描述四旋翼飞行器在空间的运动轨迹和姿态的方程。
这个方程组包括七个微分方程,包括三个表示位置的方程和四个表示姿态的方程。
位置方程描述飞行器在三个自由度上的运动,姿态方程描述飞行器在三个方向上的旋转。
接下来,动力学方程主要描述四旋翼飞行器的运动和状态方程。
四旋翼飞行器的动力学方程主要包括牛顿定律、欧拉定理、动量定理和角动量定理。
气动平衡方程则描述了四旋翼飞行器在空气中的运动状态。
这个方程组包括六个方程,其中四个方程描述四个电机的输出,两个方程描述飞行器的速度和角速度。
电机方程则描述了四个电机的动力输出。
这个方程通常采用电机的转矩和输出功率来进行建模,用来计算四旋翼飞行器的运动状态。
二、四旋翼飞行器控制技术四旋翼飞行器的控制技术是保障其稳定飞行的关键之一。
控制技术的核心是设计合理的控制算法和系统结构,通过对飞行器的状态进行控制,以达到预定的控制目标。
其中,传统的PID控制算法无法适应四旋翼飞行器的高自由度、快速响应的特点。
针对这个问题,目前研究较多的是基于模型预测控制(MPC)和切换控制的方法。
MPC将控制问题视为一个优化问题,通过对未来状态进行预测,优化当前状态,从而实现系统控制。
而切换控制则通过将控制问题分成多个子空间,通过切换不同的控制子空间,实现系统控制。
同时,四旋翼飞行器的控制技术也离不开传感技术的支撑。
四旋翼飞行器需要准确地获取各种姿态、位置、速度等信息才能进行控制。
四旋翼飞行仿真器的建模及控制方法的研究的开题报告

四旋翼飞行仿真器的建模及控制方法的研究的开题报告开题报告一、选题背景四旋翼无人机作为无人机中最为常见的一种类型,其应用领域十分广泛,包括但不限于:航拍、物流、救援、搜救等。
为了提高四旋翼无人机的飞行性能和安全性,需要对四旋翼无人机进行控制设计和仿真研究。
本文针对四旋翼无人机的飞行控制问题展开研究,探讨四旋翼无人机的建模与控制方法,以提高其飞行能力和稳定性。
二、研究内容1.四旋翼无人机的建模首先,需要对四旋翼无人机进行建模,抽象出合适的数学模型,建立其动力学关系式,同时选取合适的坐标系和传感器测量参数。
在建模过程中,需要考虑到四旋翼无人机的结构、电机和电调参数、传感器和控制器等综合因素,得到能够描述四旋翼无人机运动规律的数学模型。
2.四旋翼无人机的控制方法研究针对四旋翼无人机进行控制设计,探讨多种控制方法,包括PID控制、自适应控制、模糊控制等,根据四旋翼无人机的实际特点和要求,选择合适的控制方法。
同时,基于所选的控制方法,设计合适的控制算法,对四旋翼无人机进行模拟仿真,考察控制方法对四旋翼飞行的影响。
3.四旋翼无人机的仿真平台创建四旋翼无人机的仿真平台,通过建模和控制方法设计的仿真实验和模拟简化实验,验证仿真模型的准确性,研究不同控制方法的效果。
同时,从仿真中,可以得到更加详细的实验数据,并对其进行分析和处理,得出更有价值的结论。
三、研究意义本文的研究将有助于优化四旋翼无人机的飞控系统,提高飞行控制精度和稳定性,进一步提升飞行安全性,同时推动无人机技术的发展。
同时,基于该研究成果,还可以进一步对其他无人机类型进行研究,为无人机控制和应用提供更加详尽的指导和理论基础。
四、研究方法和步骤1.文献调研和资料收集:查阅相关文献和资料,掌握四旋翼无人机的基本原理、控制方法和应用领域。
2.建模与控制方法的设计:根据所学知识,对四旋翼无人机建立数学模型,探讨控制方法和算法,选择合适的控制方案。
3.仿真程序开发:基于四旋翼无人机的数学模型和控制方法,开发相应的仿真程序,进行模拟实验。
四旋翼飞行器飞行控制系统研究与设计
四旋翼飞行器飞行控制系统研究与设计1. 引言1.1 研究背景四旋翼飞行器是一种具有垂直起降能力和灵活操控特性的无人飞行器,近年来在军事、民用航空领域得到广泛应用。
四旋翼飞行器的飞行控制系统仍然是一个挑战性问题,需要不断的研究和改进。
在过去的几十年里,飞行控制系统技术取得了巨大的进步,从传统的PID控制方法到现代的神经网络控制和模糊控制方法,不断地推动着飞行器飞行性能的提升。
在四旋翼飞行器这种特殊结构的飞行器上,如何设计一套高效稳定的飞行控制系统仍然是一个值得研究的课题。
通过对四旋翼飞行器的飞行控制系统进行研究与设计,可以进一步提高其飞行性能、安全性和自动化程度,为未来无人机飞行技术的发展奠定基础。
本研究旨在探讨四旋翼飞行器飞行控制系统的设计原理和方法,为实现四旋翼飞行器的稳定飞行和智能控制提供技术支持。
1.2 研究目的研究目的主要是为了探索四旋翼飞行器飞行控制系统的设计与优化方法,以提高飞行器的稳定性、灵活性和控制精度。
本研究旨在深入分析传统飞行控制方法和先进飞行控制方法的优缺点,结合四旋翼飞行器的特点,提出有效的飞行控制系统设计方案。
通过实验验证,验证设计方案的有效性和实用性,进一步完善飞行控制系统的性能。
最终目的是为了提高四旋翼飞行器的自主飞行能力和应用领域的拓展,推动飞行器技术的发展和应用。
希望通过本研究的成果,为未来四旋翼飞行器的设计与控制提供参考和指导,为飞行器的性能优化和智能化发展做出贡献。
2. 正文2.1 飞行控制系统概述飞行控制系统是四旋翼飞行器的重要组成部分,它负责控制飞行器的姿态、位置和飞行参数,以确保飞行器稳定、安全地飞行。
飞行控制系统的设计和实现是四旋翼飞行器研究的关键内容之一。
飞行控制系统通常由传感器、执行器和控制算法组成。
传感器用于测量飞行器的姿态、位置、速度等信息,将这些信息传输给控制算法。
控制算法根据传感器数据计算出合适的控制指令,通过执行器控制飞行器的动作,实现飞行器的姿态和飞行参数控制。
微小型四旋翼无人直升机建模及控制方法研究_61_65
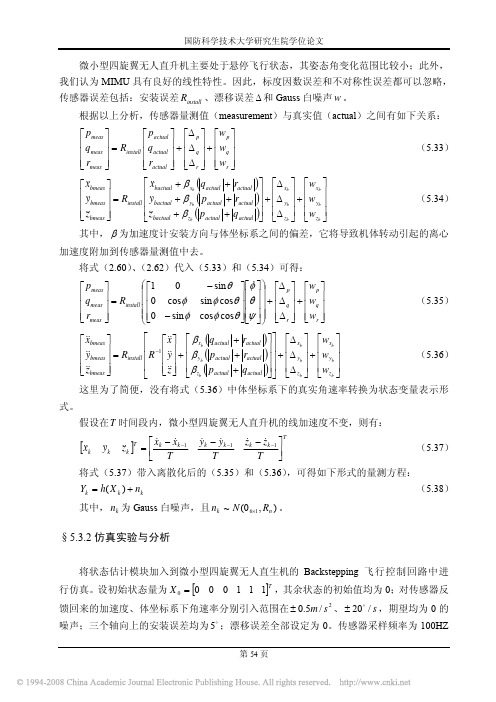
微小型四旋翼无人直升机主要处于悬停飞行状态,其姿态角变化范围比较小;此外, 我们认为 MIMU 具有良好的线性特性。因此,标度因数误差和不对称性误差都可以忽略, 传感器误差包括:安装误差 Rinstall 、漂移误差 Δ 和 Gauss 白噪声 w 。 根据以上分析,传感器量测值(measurement)与真实值(actual)之间有如下关系:
型准确性尚需验证,因此有必要通过在实际系统上进行系统辨识,得出能与数学模型相比 较的辨识模型。
2、控制器设计及实现。论文中提出的控制器设计都是基于连续系统的,而实际的系
统控制器设计必须基于离散系统进行,因此有必要针对实际系统设计进行进一步研究。
3、其它智能控制方法。不论是数学模型还是辨识模型,都不能完整地反映微小型四
加速度附加到传感器量测值中去。 将式(2.60) 、 (2.62)代入(5.33)和(5.34)可得:
(5.34)
其中, β 为加速度计安装方向与体坐标系之间的偏差,它将导致机体转动引起的离心
⎛ ⎡1 0 ⎡ p meas ⎤ ⎜ ⎢q ⎥ = R ⎜⎢ cos φ install ⎢0 ⎢ meas ⎥ ⎜ ⎜⎢ ⎢ ⎣ rmeas ⎥ ⎦ ⎝ ⎣0 − sin φ
1、综述了微小型四旋翼无人直升机的研究现状及相关技术,论述了开展这方面研究
的重要意义。
2、建立了微小型四旋翼无人直升机的数学模型。针对自行研制的微小型四旋翼无人
直升机原型样机,对其旋翼空气动力学、动力系统和刚体动力学进行数学建模,推导出了 全状态非线性系统方程,并将之变换为仿射非线性形式。 针对微小型四旋翼无人直升机的欠驱动特性, 设计了基于 Backstepping 的飞行控制 3、 算法。仿真实验表明该方法能够实现微小型四旋翼无人直升机定点悬停和轨迹跟踪飞行控 制,并具有一定鲁棒性。
微小型四旋翼无人直升机建模及控制方法研究_1_5(3)

Lyapunov 函数。
定义 3-2 (Lyapunov 函数[25])设 V ( x) 是一个正的标量函数,如果 V ( x) 具有性质:
( x) = dV ( x) 是连续的(反映能量变化趋势) V ; dx V ( x) 是正定的(反映能量大小) 。
那么, V ( x) 就成为系统的 Lyapunov 函数。 根 据 以 上 相 关 定 义 , 可 以 引 出 用 来 证 明 系 统 Lyapunov 稳 定 性 的 重 要 定 理 , 即
国防科学技术大学研究生院学位论文
⎡ R11 Ftotxb + R12 Ftotyb + R13 Ftotzb ⎤ ⎤ x ⎡ 1⎢ ⎥ ⎢ ⎥ = ⎢ R21 Ftotxb + R22 Ftotyb + R23 Ftotzb ⎥ y ⎢ ⎥ m ⎢ R31 Ftotx + R32 Ftoty + R33 Ftotz ⎥ ⎢ ⎥ z ⎣ ⎦ b b b ⎦ ⎣ ]T 为地面坐标系中的加速度。 x y z 坐标系三个坐标轴方向的分量, [ ⎤ ⎡( p cosθ + q sin φ sin θ + r cos φ sin θ ) / cosθ ⎤ ⎡φ ⎢ ⎥ ⎢ ⎥ q cos φ + r sin φ ⎢θ ⎥ = ⎢ ⎥ ⎢ψ ⎥ ⎢ ⎥ + ( q sin φ r cos φ ) / cos θ ⎦ ⎣ ⎦ ⎣ ⎤ ⎡ [ M totxb + ( I y − I z )qr ] / I x ⎤ ⎡p ⎢ ⎥ ⎢q ⎥ ⎢ ⎥ = ⎢ [ M totyb + ( I z − I x )rp ] / I y ⎥ ⎥ ⎢ ⎥ ⎣r ⎦ ⎢ ⎣[ M totzb + ( I x − I y ) pq] / I z ⎦
四旋翼无人直升机控制系统的研究的开题报告

四旋翼无人直升机控制系统的研究的开题报告一、研究背景及意义随着机械自动化技术的不断发展,无人直升机作为一种新型的机器人已经广泛应用于军事侦查、民航、农业、测量和监视等领域。
四旋翼无人直升机具有起降简单、悬停稳定、机动灵活等优点,是目前应用最广泛的一种无人直升机。
四旋翼无人直升机主要由机身、四个转子、电池和控制系统等部件组成。
其中,控制系统是保证飞行安全和稳定的关键,包括了传感器、控制器、通信模块、执行机构等。
当前,对四旋翼无人直升机控制系统的研究主要集中在控制策略的设计和控制器的优化方面。
但是,传感器的选择和安装、不同环境下的控制性能、失控情况的应对等问题也是需要研究的重点。
因此,本研究旨在针对四旋翼无人直升机的控制系统进行深入研究,探究其控制策略和控制器优化的同时,重点关注传感器选型和布置、控制性能和失控情况的分析和解决方案研究,进一步提高四旋翼无人直升机的飞行安全性和稳定性,提升其在军事和民用领域的应用。
二、研究内容及方法本研究的主要内容包括以下几个方面:1.四旋翼无人直升机控制系统设计:通过对四旋翼无人直升机各个部件的分析,采用Angular Velocity Control(AVC)控制策略,设计出符合实际应用需求的控制系统模型。
2.传感器选型与布置方案研究:在控制系统中,传感器是获取外界信息的重要途径,本研究将结合传感器的原理和适用范围,选择合适的传感器并设计出最优的传感器布置方案。
3.环境因素对控制性能影响的研究:探究不同环境下四旋翼无人直升机的控制性能,通过实验验证并分析环境因素对于四旋翼无人直升机控制性能的影响。
4.失控情况应对措施研究:为了提高无人直升机的安全性,本研究将对四旋翼无人直升机出现失控情况时的应对措施进行研究,提出相应的解决方案。
本研究的方法包括理论分析和实验研究相结合,利用MATLAB和Simulink软件进行算法设计和仿真,通过搭建四旋翼无人直升机控制系统实验平台开展实验研究,采用误差分析和数据处理方法对实验结果进行分析和评估。
四旋翼飞行器飞行控制系统研究与设计

四旋翼飞行器飞行控制系统研究与设计
四旋翼飞行器是一种由四个旋翼组成的无人飞行器,具有升降、俯仰、横滚和偏航等
飞行能力,广泛应用于军事、民用等各个领域。
飞行控制系统是四旋翼飞行器的核心部分,负责控制飞行器的飞行动作和稳定性。
飞行控制系统需要实现飞行器的基本动作控制,包括升降、俯仰、横滚和偏航。
升降
通过控制四个旋翼的转速来实现,俯仰和横滚通过改变旋翼的倾斜角度来实现,偏航通过
改变旋翼的转速差来实现。
飞行控制系统需要根据飞行器的姿态、位置和速度等参数,计
算出适当的控制量,并通过电动调节器或电动转子来实施控制。
飞行控制系统需要实现飞行器的稳定性控制。
由于四旋翼飞行器具有较高的自由度和
灵活性,所以很容易出现不稳定现象。
飞行控制系统需要通过检测飞行器和环境的状态信息,计算出适当的控制量,使飞行器保持稳定飞行姿态。
姿态稳定控制主要通过控制旋翼
转速的反馈来实现,位置和速度稳定控制主要通过控制位置和速度的反馈来实现。
飞行控制系统还需要实现飞行器的导航和定位功能。
导航功能包括路径规划、航迹跟
踪和障碍物避障等,定位功能包括位置估计和姿态估计等。
导航和定位功能可以通过各种
传感器和算法来实现,如惯性测量单元、全球定位系统、气压高度计等。
四旋翼飞行器的飞行控制系统是一个复杂的系统工程,需要集成多种传感器和算法,
实现飞行动作控制、稳定性控制和导航定位等多种功能。
随着人工智能和自动化技术的发展,飞行控制系统将更加智能化和自动化,为四旋翼飞行器的飞行提供更好的保障。
四旋翼无人直升机飞行控制技术研究
南京航空航天大学硕士学位论文
摘
要
四旋翼无人直升机是一种外型新颖结构简单的无人机,具有一定的军事和 民用价值。针对四旋翼无人直升机的独特性能,重点研究了其数学建模以及飞 行控制律的设计问题。尝试采用动态逆和变结构控制相结合的方法设计四旋翼 无人直升机飞行控制律。 首先,分析了四旋翼无人直升机的特点和飞行运动方式,建立了其六自由 度动力学模型,并详细分析了其动力学特性。其次,应用经典控制方法设计了 四旋翼无人直升机的飞行控制律。 然后,根据时间尺度理论,将四旋翼无人直升机飞行控制系统划分为快变 量、较快变量和慢变量三个子系统。分别对三个子系统应用动态逆控制,动态 逆控制虽然可以得到较好的动态特性,但鲁棒性能较差。为了使所设计的系统 能够抗气动参数的不确定性和外界扰动的影响,在应用动态逆理论进行线性化 后,应用变结构控制提高系统的鲁棒性。整个系统的控制律设计简单,易于工 程实现。 最后,通过仿真实验表明,非线性动态逆是一种精确线性化方法,若模型 足够精确,这种方法在理论上将会收到很好的控制效果。但实际系统不可避免 的存在参数摄动和扰动,其控制效果不够理想。变结构控制方法的引入很好地 解决了这一问题。动态逆和变结构控制相结合的控制律具有良好的动态特性、 跟踪特性和鲁棒特性,应用这种方法设计四旋翼无人直升机飞行控制系统是可 行和有效的。 关键词:四旋翼无人直升机,动力学模型,飞行控制系统,动态逆控制,变结 构控制
表23地面坐标系和机体坐标系的转换关系地面坐标系机体坐标系ggxoggyn?sinsinsincoscoscossinozsinsincossincossincossinsincos?coscos232四旋翼无人直升机动力学微分方程在忽略弹性振动及变形的情况下直升机的运动也和固定翼飞机的运动一样可以看成一个六自由度的刚体直升机在空间的运动可分解为空间平动和绕直升机质心的定点转动也就是说它包含重心沿三个轴的线运动进退升降和左右侧飞和绕三个轴的转动滚转俯仰和偏航20
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于动力学模型的小型直升机控制研究学生姓名:戴德松班级:F0802004学号:5080209100指导老师:李劲松摘要微小型四旋翼无人直升机是一种外型新颖、性能卓越的垂直起降无人机,具有重要的军事和民用价值。
本文主要讨论四旋翼小型无人直升机的建模与仿真。
首先介绍小型无人机的历史、发展、特点和作用。
其次对四旋翼小型无人直升机建立模型,进行物理分析,列出微分方程并线性化,得到四旋翼小型无人直升机系统的传递函数和状态空间方程。
并用Matlab的Simulink仿真软件包测试各种算法对本系统的稳态和动态响应参数。
考察各种算法下的系统的鲁棒性,快速性等性能并确定最优算法。
最后讨论了自适应逆控制算法的可行性。
关键词:小型四旋翼直升机、建模、PID、自适应ABSTRACTKEY WORDS:Mini quad rotor, Modeling, PID,adaptive filterMini quad rotor is an excellent, novel vertical take-off and landing Unmanned Aerial Vehicle(UA V) for both military and civilian usages. This paper mainly investigates the Small Scale Helicopter system. First, it introduced the system to the reader about its history, development, character and why we should investigate this system. Second, it establishes the physics model for the system and use Laplace transform and state space formula to describe it.Then, use Matlab as a tool, we stimulate the response of the angle to the force when apply different methods and signals. At last, we apply adaptive filter into this system as an experiment.目录第一章小型无人机概述 (3)1.1小型无人机系统简介 (3)1.1.1 无人机的历史与发展 (4)1.1.2无人机的类型 (4)1.1.3可应用于四旋翼小型无人机的控制理论 (5)1.2本次PRP项目的目标和难点 (7)第二章小型四旋翼直升机的建模 (7)2.1小型四旋翼直升机的机体构造以及工作原理 (7)2.1.1机体构造 (8)2.1.2工作原理 (10)2.2小型四旋翼直升机的动力学分析与建模 (13)2.2.1动力学分析以及传递函数建立及其线性化 (13)2.2.2状态空间方程构造 (16)2.2.3状态空间方程的线性化 (20)2.3关于模型的讨论 (21)2.3.1能控性、能观性的定义 (21)2.3.2系统的能控性 (22)2.3.3系统的能观性 (24)2.3.4模型及状态空间方程的结论 (26)第三章小型四旋翼飞机的PID算法设计与仿真 (27)3.1设计要求 (28)3.2理论分析 (28)3.3四旋翼直升机Matlab仿真系统的响应 (30)3.3.1Matlab仿真工具:Simulink (30)3.3.2 小飞机系统的各项参数 (30)3.3.3控制器设计和仿真 (30)第四章总结与展望 (37)致谢 (38)小型四旋翼无人机的建模与仿真第一章小型无人机概述1.1小型无人机系统简介目前小飞机已经从最初的形状发展到现在多各式各样、各具功能。
左图是较为典型的四旋翼小型无人机,其结构大体可分为:四个旋翼、电机,中心芯片,四个支臂,陀螺仪和四个测速器和地面控制台。
我们的模型建立背景是:假设四旋翼直升机处于悬停在空中或匀速直线运动的状态。
某一时刻,小飞机突然发生状态的改变,通过小飞机内置芯片接受测速器和陀螺仪发来的信号,然后通过改变电流,调整转速,使得小飞机恢复原始状态。
四旋翼小飞机系统的组成框图如下图所示:系统由脉冲宽度调制器(PWM)、电流控制器、速度控制器、位置检测器等几大部分组成了一个闭环。
1.1.1 无人机的历史与发展无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
无人机的诞生可以追溯到1914年。
当时第一次世界大战正进行得如火如荼,英国的卡德尔和皮切尔两位将军,向英国军事航空学会提出了一项建议:研制一种不用人驾驶,而用无线电操纵的小型飞机,使它能够飞到敌方某一目标区上空,将事先装在小飞机上的炸弹投下去。
这种大胆的设想立即得到当时英国军事航空学会理事长戴·亨德森爵士赏识。
他指定由A.M.洛教授率领一班人马进行研制。
1927年,由A.M.洛教授参与研制的“喉”式单翼无人机在英国海军“堡垒”号军舰上成功地进行了试飞。
该机载有113公斤炸弹,以每小时322公里的速度飞行了480公里。
“喉”式无人机的问世在当时的世界上曾引起极大的轰动。
[1]二战结束之后,随着航空技术的飞速发展,无人机家族也逐渐步入其鼎盛时期。
时至今日,世界上研制生产的各类无人机已达近百种,并且还有一些新型号正在研制之中。
而随着计算机技术、自动驾驶技术和遥控遥测技术的发展和在无人机中的应用,以及随着对无人机战术研究的深入,无人机在军事方面的应用日益广泛,被誉为“空中多面手”、“空中骄子”。
[2]无人机的作用在军事方面主要被用于:作为靶机、监视侦察、诱骗敌人、干扰敌人、对敌攻击、校正射击、通信中继等。
[3]虽然无人机的诞生缘于军事,但是其在民间应用也越加广泛。
诸如场区监控、气象探测、空中巡查、地质勘探、水灾火灾防救、交通控制等都有无人机的用武之地。
此外,在农业、核能、生物等领域,无人机也能找到它的发挥空间。
1.1.2无人机的类型四旋翼无人机只是无人机大家族中的一个分支。
无人机目前为止主要的应用还是在军事方面,按照其在军事方面的不同作用,可将无人机分为四大类[4]:1.战术无人侦察机(TUA V):这种无人机具有移动速度快,反雷达能力强等特点。
主要被用于侦察敌情、搜索目标、实施搜救、截获敌情、部队作战指挥与战场目标和战斗损失的评估等。
2.战略无人侦察机(SUA V):这种机型特点是反隐性能好、分析信号和破解、截获信号能力强,巡航时间长等优点。
主要承担对敌方部队动向的长期跟踪、工业情报及武器系统试验监视和信息的窃取等。
3.无人战斗机(UCA V):作为一种空中运载工具,无人机也能携带多种对地攻击武器,飞往前线或深入敌占区纵深,对地面军事目标进行打击;它可以用空对地导弹或炸弹对敌防空武器实施压制;用反坦克导弹等对坦克或坦克群进行攻击;用集束炸弹等武器对地面部队集结点等进行轰炸;特别值得一提的是反辐射攻击无人机,这是一种利用敌方雷达辐射的电磁波信号,发现、跟踪,以至最后摧毁雷达的武器系统。
它不仅可用于攻击敌方雷达、干扰机和其他辐射源,而且高速反辐射无人机加装复合制导装置等设备后,还可用于攻击敌预警机和专用电子干扰飞机。
4.作为靶机:这是无人机的最初用途,可用于地面防空和空中格斗武器的试验与训练。
同时,无人机还可以按照体积大小、作战纵深及空中停留时间无人机分为以下几类:1.1.3可应用于四旋翼小型无人机的控制理论由于四旋翼飞机具有的多种功能和其广泛的应用前景,各国学者都在争先对四旋翼小飞机进行理论研究。
同时,近年来由于传感器、驱动、处理器以及能源供给等在技术方面有了实质性的发展,为四旋翼直升机的发展和更广泛的应用空间提供了实现的可能。
与传统的直升机那种具有可变倾斜角螺旋桨不同的是,四旋翼直升机是具有四个固定倾斜角的螺旋桨(即垂直于机身平面),从而使其结构和动力学特性得到了简化(如上简图所示)。
本次PRP,由于参与者年级较低,知识储备量少,所以引用较简单的假设去完成模型的建立。
这里假设旋翼提供的升力与电机的电流大小成正比,也就是说假设旋翼提供的升力与旋翼转速成正比。
有了这个假设,易知旋翼的的转矩与升力大小亦成正比。
这样就可以利用线性的方程组来建立状态空间方程。
四旋翼直升机具有不稳定、复杂、非线性和时变动力学特性,使得选择合适的控制方法、自适对其进行合理的控制和仿真变得非常困难。
通过查阅大量资料得知,国外目前有H∞应、变结构、智能、LQ以及PID等多种控制方法,主要解决四旋翼直升机的非线性、最优等问题。
在国内,国防科技大学聂博文曾在该方面采用Backstepping、自抗扰控制器(Actived Disturbance Rejection Controller,简称ADRC)两个方法进行了详尽的讨论,这些给于我们研究该项目提供了极大的帮助。
Backstepping的设计思想是:针对满足严格反馈控制结构的系统,通过反向递推设计,用系统化的方法同时构造Lyapunov函数和镇定控制器。
基于Backstepping的控制器设计方法,其基本思路是将复杂的系统分解成不超过系统阶数的子系统,然后通过反向递推设计为每个子系统设计部分Lyapunov函数和中间虚拟控制量,直至完成整个控制器的设计[5][6]自抗扰控制器(Actived Disturbance Rejection Controller)已经历了20多年的发展历程,如今在控制界已具有一定知名度,不少人被其独特的控制思想及卓越的控制品质所吸引,积极致力于其在尖端科技领域的应用。
哈尔滨工业大学王树刚在H回路控制方面给出同样精彩的论述。
[7]∞发达国家的很多大学和科研机构都在进行着无人机的相关研究,比如:美国国家航空航天局(NASA)、麻省理工学院(MIT)、伯克利(Berkley)、佐治亚大学(GIT)、卡内基梅隆大学(CMU)、斯坦福大学以及德国柏林工业大学、澳大利亚悉尼大学、日本东京工业大学、以色列埃尔比特系统公司等。
在国内有北航、南航、哈工大、西工大、国防科大、浙大、上大、上海交大以及清华大学等高校。
国际上,美国、以色列、日本、西欧一些国家在无人机研究领域处于领先地位。
与上述国家相比,我国对于无人机的研究由于起步较晚,目前处于相对落后的状态。
但是由于小飞机广泛的应用价值和其作用方面的不可替代性,使得小飞机理论的研究仍是不可忽视的方面。
1.2本次PRP项目的目标和难点本次PRP项目的由于参加的学生年级较低,知识储备不足,同时之前没有过该方面的经验,所以本次PRP主要是研究小飞机悬停状态下受到微小扰动时的建模,模型及状态空间方程的能控性、能观性、稳定性分析,以及选配控制系统、简单的仿真等一些比较基础的方面。