智能搬运机器人的研究与设计
搬运机器人的方案设计

搬运机器人的方案设计引言搬运机器人是一种能够自主移动并执行物体搬运任务的智能机器人。
它的出现使得重复性的劳动得以自动化,可以在工业生产线、仓储物流等场景中发挥重要作用。
本文将从机器人系统结构、感知技术、路径规划和控制策略等方面,对搬运机器人的方案设计进行介绍和讨论。
机器人系统结构搬运机器人的系统结构通常包括移动基座、机械臂、传感器和控制系统。
移动基座提供机器人的移动能力,机械臂负责物体的抓取和搬运,传感器用于感知环境和物体,控制系统则控制机器人的移动和操作。
感知技术搬运机器人需要准确地感知周围的环境和物体,以便进行路径规划和操作。
常用的感知技术包括视觉、激光雷达、声纳等。
视觉系统可以用于识别和定位物体,激光雷达可以获取精确的环境地图,声纳可以检测障碍物并进行距离测量。
这些感知技术的组合可以提供全面的环境感知能力,帮助机器人完成搬运任务。
路径规划路径规划是搬运机器人的关键技术之一,它决定了机器人在环境中的移动轨迹。
常用的路径规划算法包括A*算法、Dijkstra算法、RRT算法等。
这些算法可以结合激光雷达地图和超声波传感器的障碍物检测结果,生成安全和高效的移动路径。
控制策略控制策略是搬运机器人实现具体动作的关键,它通过对机械臂和移动基座的控制,实现物体的抓取和搬运。
常用的控制策略包括PID控制、模型预测控制等。
这些控制策略可以根据不同的搬运任务需求进行调整,并结合视觉和力觉传感器的反馈信息,实现精确的搬运操作。
安全性和人机交互在搬运机器人的方案设计中,安全性和人机交互也是非常重要的考虑因素。
搬运机器人需要具备安全保护装置,如紧急停止按钮、碰撞传感器等,以保证在意外情况下能够立即停止运动。
此外,机器人还需要与人进行有效的交互,如语音提示、显示屏幕等,提供友好的操作界面和信息展示。
结论搬运机器人的方案设计涉及到机器人系统结构、感知技术、路径规划和控制策略等多个方面。
科学合理的方案设计可以提高搬运机器人的工作效率和安全性。
搬运AGV系统设计及路径规划研究共3篇
搬运AGV系统设计及路径规划研究共3篇搬运AGV系统设计及路径规划研究1搬运AGV(Automated Guided Vehicle)系统可以帮助企业实现自动化物料搬运和分配,从而提高物流和供应链的效率。
在搬运AGV系统中,路径规划就是一个非常重要的环节,它可以确保AGV沿着最短路径或最优路径进行搬运任务。
搬运AGV系统的设计需要考虑以下因素:1. AGV的载重量和尺寸:根据企业的需求,可以选择适当的载重量和尺寸的AGV来满足物料搬运的要求。
2. AGV的定位系统:通常使用激光定位系统、磁条导航系统或视觉导航系统来定位AGV的位置,从而实现路径规划和搬运任务。
3. AGV的电池寿命和充电方式:电池寿命和充电方式直接影响AGV的工作时间和效率。
4. AGV的安全保护和紧急停车措施:AGV必须具备安全保护和紧急停车措施来应对突发情况,保护员工和设备的安全。
在搬运AGV系统中,路径规划算法可以分为静态路径规划和动态路径规划两种。
静态路径规划算法是指在系统开始运行前,提前规划好AGV的行进路径。
静态路径规划算法简单、稳定,适用于一些定点、周期性的物料搬运任务。
常见的静态路径规划算法有A*算法、Dijkstra算法和Floyd算法等。
动态路径规划算法是指在AGV系统实时运行过程中,根据当前情况进行路径规划。
动态路径规划可以根据环境变化、任务变化和AGV状态变化等因素进行调整,可以应对更加复杂的任务需求。
常见的动态路径规划算法有遗传算法、模拟退火算法、人工神经网络等。
在实际应用中,根据具体的搬运需求和系统性能,可以选择适当的路径规划算法。
同时,在路径规划过程中,需要考虑以下因素:1. 地图建立:建立精准的搬运AGV地图,包括道路、障碍物、充电区域等信息。
2. 起点终点确认:根据实际运行需求,确认起点和终点,从而确定AGV行进的方向和路径。
3. 避障策略:根据地图信息和传感器数据,实时避免障碍物,确保AGV的安全行进。
智能物流搬运机器人设计方案

智能物流搬运机器人设计方案在现代物流领域,科技发展变得越来越迅速,大大改变了物流行业的发展方式。
大多数物流行业已经将其管理中心移至自动化和智能化技术,利用机器人技术使经营运营更加高效。
机器人已经应用于配送、库存管理、堆垛、装卸、包装等各种物流操作中。
本文介绍了一种智能物流搬运机器人的设计方案。
首先,智能物流搬运机器人具有非常高的灵活性和通用性,可以实现物流仓储中各种物品的自动搬运功能。
该机器人可以利用轨道、轮子和轨迹导航系统,自由行走于仓库中,实现货物的自动搬运和送达。
该设计方案还包括人机交互功能,可以智能地识别仓库中的物体,从而实现机器人的自动前往目的地的功能。
其次,智能物流搬运机器人的设计方案还应包括安全性能。
机器人搬运是一个高危险性的运营领域,需要采取有效的安全策略,以确保机器人能够安全有序地运营。
该方案应具备通过警报系统提醒人们被机器人堵住,以及让机器人自动停下来,避免发生危险事件。
再次,智能物流搬运机器人设计方案还应包括节能性能。
机器人应采用集成电路芯片进行控制,通过变频调速来降低能耗,并采取其他一些措施,以节省能源。
同时,机器人应采用新能源技术,如太阳能技术,以降低经营成本和环境污染。
最后,本智能物流搬运机器人的设计方案还应包括一个高效的管理系统。
机器人可以实时监测所搬运货物的状态,通过数据分析来优化仓库管理,提高运输效率,并实现自动调度。
此外,机器人系统还可以与ERP系统集成,以便实时跟踪货物的实时位置和状态,这样就可以有效地提高物流效率。
综上所述,智能物流搬运机器人的设计方案应包括灵活性和通用性、安全性、节能性和高效管理系统。
本方案将有助于物流行业实现更高效的配送,以及机器人技术在物流行业的发展,为物流行业带来更多可能性。
智能搬运机器人的设计与实现
智能搬运机器人的设计与实现摘要:因为现代科学技术的快速发展,所以有很多的现代机器在出现,无论是在实体经济还是虚拟经济中,人们总是更依赖于科技的发明,越来越用自动化代替现代化,尤其在工业上,人工的使用不仅耗费时间,更耗费能量,所以,也为了提高生产效率,特别设立了一种智能搬运机器人,这种机器人是由单机片控制的,机器人的发力部分和承载力的作用的部分,主要在机器人的手臂,手臂中有机械结构的设计,对于其他的部分也需要设置控制系统,控制系统除了有两路的光电传感器,也需要学会对颜色进行识别,可以把货物进行分辨,把不同的货物进行不同的分类;最后要根据不同的实验证明,智能机器人存在是合理的,各方面的构造也是很科学的,智能机器人最大的用处是要会搬运货物。
关键词:智能搬运机器人;设计;实现引言:在传统的工业生产中,尤其是一些搬运货物的工程项目,总是需要很多的劳动力,要改善劳动工人的劳动条件,不再单单使用人工劳动力,这样会增加项目的成本,而且还会延长时间,把工期延长,提高工人的劳动效率,针对传统劳动力暴露出来的特点越来越多,所以人们开始崇尚自动化与生产机械化,也开始加快实现机械自动化的步伐;在生产的过程中,特别是一些很高超的机械设备,还有在一些特殊的环境下,就需要智能化的机器人来搬运,智能机器人的实现也是一种必然的产物,最重要的作用就是就是搬运,智能机器人之所以能够快速发展,就是因为这种积极性让人们的意识被影响;其次,也是因为智能机器人可以代替人工作业,能够按照规定的程序进行工作。
一、系统的总体设计对机器人的控制需要有一个控制中心,机器人的控制平台系统由很多部件组成,这其中包括16路巡线传感器和传感器信号处理板以及主控制板,还有电机驱动板和其他的开发零件,这些加在一起就组成了机器人的控制系统,这个系统可以操纵机器人进行一些货物的搬运,可以提高工程的完成进度,也可以帮助人类解决一些人力达不到的力量;这个主系统采用单片机进行控制,控制中心的零件型号为STCI2C5A60S2,使用这个型号的单片机对机器人很适用,机器人对外界的感应需要用一个通道进行传递,通常会开辟一个s通道与输入接口连接在一起,这一整个通道可以对广电进行连接,同时通道的位置也与超声传感器离得很近,这样就可以运用周围的传感器去感知外部的信息,接受外部的信号,这样就机器人才可以接受到指令,开始工作;而且对于自动机器人都会在自己的底部安装一个16路巡线传感器,这个传感器的作用是感知地面上的白条,这就是机器人的路线,地面上的白条都会有交叉的时候,在交叉的位置会设有点,而这个传感器就能让机器人感受到,可以及时进行转弯,转换路线,最后在经过单片机分析之后,电机的驱动板对调速电机进行控制,最后可以完成人类分配下来的任务,这也是机器人的工作原理[1]。
基于STM32的智能搬运机器人的研究与设计
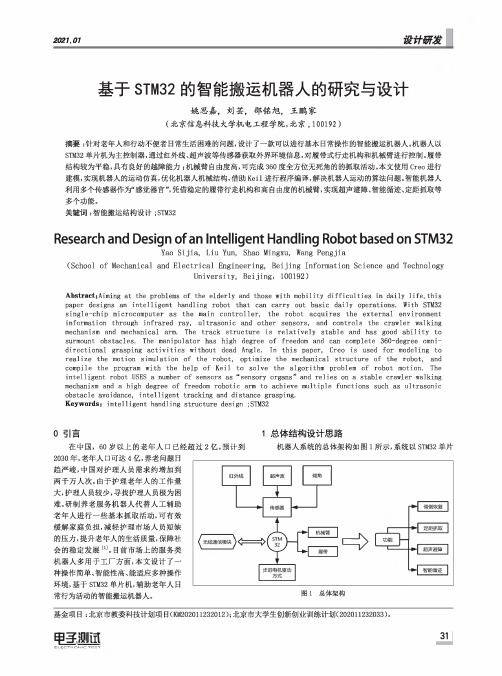
2021.01设计研发基于STM32的智能搬运机器人的研究与设计姚思嘉,刘芸,邵铭旭,王鹏家(北京信息科技大学机电工程学院,北京,100192 )摘要:针对老年人和行动不便者日常生活困难的问题,设计了一款可以进行基本日常操作的智能搬运机器人。
机器人以STM32单片机为主控制器,通过红外线、超声波等传感器获取外界环境信息,对履带式行走机构和机械臂进行控制。
履带结构较为平稳,具有良好的越障能力;机械臂自由度高,可完成360度全方位无死角的的抓取活动。
本文使用Creo 进行 建模,实现机器人的运动仿真,优化机器人机械结构,借助Keil 进行程序编译,解决机器人运动的算法问题。
智能机器人利用多个传感器作为'感觉器官”,凭借稳定的履带行走机构和高自由度的机械臂,实现超声避障、智能循迹、定距抓取等多个功能。
关键词:智能搬运结构设计;STM32Research and Design of an Intelligent Handling Robot based on STM32Yao Sijia, Liu Yun, Shao Mingxu, Wang Pengjia(School of Mechanical and Electrical Engineering, Beijing Information Science and TechnologyUniversity, Beijing, 100192)Abst ract :Aiming at the problems of the elderly and those with mobility difficulties in daily life , this paper designs an intelligent handling robot that can carry out basic daily operations. With STM32 single-chip microcomp l iter as the main controller, the robot acquires the external environment information through infrared ray, ultrasonic and other sensors, and controls the crawler walking mechanism and mechanical arm. The track strueture is relatively stable and has good ability to surmount obstaeles. The manipulator has high degree of freedom and can complete 360-degree omni- directional grasping activities without dead Angle. In this paper, Creo is used for modeling to realize the motion simulation of the robot, optimize the mechanical strueture of the robot, and compile the program with the help of Keil to solve the algorithm problem of robot motion. The intelligent robot USES a number of sensors as "sensory organs ?? and relies on a stable crawler walking mechanism and a high degree of freedom robotic arm to achieve multipie functions such as ultrasonic obstaele avoidance, intelligent tracking and distance grasping.Keywords : intelligent handling structure design ;STM32红外线超声波倾角0引言1总体结构设计思路在中国,60岁以上的老年人口己经超过2亿。
智能物料搬运实验报告(3篇)

第1篇一、实验背景随着我国工业自动化水平的不断提高,智能物料搬运技术在生产过程中扮演着越来越重要的角色。
为了验证智能物料搬运系统的性能和可行性,我们开展了本次实验。
本实验旨在通过搭建智能物料搬运系统,实现对物料的自动化搬运,提高生产效率,降低人工成本,同时确保物料搬运过程中的安全性。
二、实验目的1. 验证智能物料搬运系统的稳定性和可靠性;2. 评估系统在不同工况下的性能;3. 分析系统在实际应用中的优缺点,为后续优化提供依据。
三、实验设备1. 智能物料搬运系统:包括机器人、传感器、控制器、搬运设备等;2. 实验场地:搭建模拟生产线,模拟实际生产环境;3. 物料:用于搬运的各类物品,如零件、产品等;4. 计算机及软件:用于数据采集、处理和分析。
四、实验方法1. 系统搭建:根据实验需求,搭建智能物料搬运系统,包括机器人、传感器、控制器、搬运设备等;2. 系统调试:对系统进行调试,确保各部件正常运行;3. 实验方案设计:根据实验目的,设计实验方案,包括实验参数、实验步骤等;4. 实验实施:按照实验方案进行实验,采集数据;5. 数据分析:对采集到的数据进行分析,评估系统性能。
五、实验结果与分析1. 系统稳定性:在实验过程中,智能物料搬运系统表现出良好的稳定性,能够适应不同的工况;2. 性能评估:实验结果表明,系统在不同工况下的性能均能满足要求,搬运速度、精度等指标均达到预期;3. 优缺点分析:系统优点包括:提高生产效率、降低人工成本、提高安全性等;缺点包括:系统成本较高、对环境要求较高、维护难度较大等。
六、结论通过本次实验,我们验证了智能物料搬运系统的稳定性和可靠性,证明了其在实际生产中的应用价值。
同时,我们也发现了系统的一些不足,为后续优化提供了依据。
以下是实验结论:1. 智能物料搬运系统在实际生产中具有广泛的应用前景;2. 系统性能满足生产需求,能够提高生产效率、降低人工成本;3. 针对系统存在的不足,应从以下几个方面进行优化:a. 降低系统成本;b. 提高系统对环境的适应性;c. 优化系统维护策略。
智能物流搬运机器人设计方案

智能物流搬运机器人设计方案随着工业技术发展,智能物流搬运机器人越来越受到重视,物流行业也迫切需要此类机器人业务的发展。
物流搬运机器人可以把人类的“劳动力”转化为机器的“智能劳动力”,实现自动搬运物品、缩短物流环节,提高物流运输效率,并实现物流企业的自动化生产。
智能物流搬运机器人有很多类型,它们可以搬运各种规格的物品,具有较强的信息化能力。
物流搬运机器人可以通过识别二维码、RFID 标签等功能,来识别物品信息,并自动完成搬运任务。
二、智能物流搬运机器人的设计方案智能物流搬运机器人的设计方案需要考虑多个因素,包括机器人的外形、加工工艺、控制系统、安全性能等。
(1)机器人外形设计物流搬运机器人的外形设计要求性能优良、体积小巧。
它需要考虑搬运物品大小、重量等参数,确定搬运装置的大小和位置,以及搬运速度。
(2)加工工艺物流搬运机器人的加工工艺需要考虑安装的可靠性和稳定性,以保证机器人的高效率运行。
具体而言,需要考虑智能传感器、安全装置、悬挂系统等配置。
(3)控制系统智能物流搬运机器人的控制系统需要使用智能软件,它能够根据环境变化,自动运行物流搬运机器人,以便实现高效搬运。
(4)安全性能物流搬运机器人要求在搬运、运行过程中具有较强的安全性能,为了保障搬运效果达到最高的要求,安全装置有关的设计要求非常严格。
三、智能物流搬运机器人的应用智能物流搬运机器人可用于各种物流场景,比如仓库、商场、工厂、仓储中心等场所。
它可以有效减少人力成本,提高搬运效率,实现物流企业的自动化生产,替代人工搬运,提高物流搬运的效率和质量。
由于机器人的智能化及操作流程的工作效率,可以大大减少物流搬运过程中的时间,延长货物的使用寿命,提高物流服务的效率。
此外,智能物流搬运机器人可以实现智能分拣、智能仓库管理等功能,实现仓库物品的自动化管理和精准快速的搬运,极大地提高了物流效率。
四、结论智能物流搬运机器人是一种有效的搬运工具,它具有高效率、体积小巧、可靠性强、安全性能高等特点,可以有效减少人力成本,提高搬运效率,实现物流企业的自动化生产,提高物流运输效率和质量,实现物流搬运的智能化。
自动化仓储系统中的智能搬运机器人设计与优化
自动化仓储系统中的智能搬运机器人设计与优化在现代物流系统中,自动化仓储系统扮演着至关重要的角色。
而在这些系统中,智能搬运机器人的设计与优化尤为重要。
本文将探讨自动化仓储系统中智能搬运机器人的设计原理、优化方法以及未来发展趋势。
一、设计原理智能搬运机器人是自动化仓储系统的核心组成部分之一,其设计原理包括机械结构、感知系统和控制系统三个方面。
1. 机械结构智能搬运机器人的机械结构应具备稳定性和灵活性,能够适应不同类型货物的搬运需求。
常见的机械结构包括轮式、履带式和步行器式等,每种结构都有其适用场景和优缺点。
2. 感知系统感知系统是智能搬运机器人实现自主导航和避障的关键。
通常采用激光雷达、摄像头、红外线传感器等多种传感器,实时获取周围环境信息,并通过算法处理,实现路径规划和障碍物避让。
3. 控制系统智能搬运机器人的控制系统负责指导机器人的运动和动作执行。
控制系统通常由主控制器、运动控制器和执行器组成,其中主控制器负责整体调度和决策,运动控制器负责运动轨迹规划和速度控制,执行器则执行具体的搬运任务。
二、优化方法为提高智能搬运机器人的工作效率和性能,可以从多个方面进行优化。
1. 路径规划优化通过算法优化路径规划,减少机器人在仓库中的行走距离和时间,提高搬运效率。
2. 载重能力优化优化机器人的机械结构和动力系统,提升其承载能力,实现更大规模货物的搬运。
3. 自主导航优化引入深度学习等人工智能技术,提升机器人的自主导航能力,使其能够更准确、更快速地响应环境变化。
4. 能源管理优化优化机器人的能源管理策略,延长其工作时间,提高系统的稳定性和可靠性。
三、未来发展趋势随着人工智能、物联网和自动化技术的不断发展,智能搬运机器人将迎来更广阔的发展空间。
1. 智能化程度提升未来智能搬运机器人将具备更高的智能化水平,能够实现更复杂的任务和更灵活的操控,适应不断变化的仓储环境。
2. 多样化应用场景智能搬运机器人将不仅局限于传统仓储行业,还将应用于工厂生产线、医疗卫生等多个领域,为人们的生产和生活带来便利。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
广
场
第1 7 3 期
智能搬 运机器 人的研究 与设 计
徐文浩 罗冠清 陈亚文 汪 涛
( 江西理工大学 电气工程与 自动化学 院, 江西 赣州 3 4 1 0 0 0 ) 摘要 : 为 了降低物流运输和仓储配送过程 中使用工具 的学 习成本和人工成本 , 提高工作效 率, 本文设计 了一种 以单片机为控制核心的智能跟随搬运机器人。通过采用视觉识别模块 、 人体识别模块 、 边 界检 测模块 以及视 觉 辅助等 多个模块进行 多方面信 号采 集, 并进行综合优化处理 , 增 强 了系统 的稳定性和机器人 的灵活性 , 实现 了
0 引言
车体主体采用合金与工程塑料制成 ,俯视成矩
形状 , 左右各两个轮子 , 每个轮子用一个独立 电机驱 动, 总共 四个轮子四个电机。 车体机械装配图如图一
所示。
如今 , 随着经济 的不断发展 , 人们生活水平不断 提高 , 仓库存储 、 物流运输等领域的转移和运输压力 愈发严重 。 目前仓库对大型物品的转移和存储 、 物流 运输 中转站处物品的转运等工作都是由人直接操作 运载器械或直接搬运为主。人工直接操作的好处在
nd a he t l f e x i b i l i y t o f t h e r o b o t t o a c h i e v e i t s b o d y - f o l l o wi n g i n d e p e n d e n c e nd a a s s i s t h nd a l i n g wo r k, wh i c h a v o i d s t h e
自主跟 随人体 , 协助工作人 员进行搬运 工作 , 避免人体 需要携带信号发 射源 的问题 , 极大地提高 了用户体验。
关键词 : 识别 系统 ; 主动跟随; 电机驱 动 中图分类号 : T P 2 4 2 文献标识码 : A 文章编号 : 1 6 7 l - 4 7 9 2 ( 2 0 1 6 ) 4 - 0 1 7 0 . 0 4
t i o n,t he a r t i c l e d i s c u s s e s a n nt i e l l i g e n t c o n r t o l s y s t e m wi t h he t r o b o t p o ae r c e te n r e d wi t h he t M CU. Ma n y a s p e c t s o f s i g n a l a c q u i s i i t o n wi l l b e d o n e nd a o p i t mi z e d c o mp r e h e n s i v e l y b y u s i n g t h e v i s u a l r e c o ni g t i o n mo d u l e ,t he b o d y i -
2 系统 总体构 成
本系统设计采用 C 8 0 5 1 F 3 4 0单片机作为控制 模块的核心。 驱动模块控制直流电机驱动小车运动。 报警系统由信号灯和蜂鸣器组成。其他各功能模块 有视觉识别模块 、 人体识别模块 、 边界检测模块 、 视 觉辅助模块。通过综合各个传感器回传的简单数字
J i a n g x i G a n z h o u 3 4 1 0 0 0 )
Ab s t r a c t : I n o r d e r t o r e d u c e t h e l e a r n i n g c o s t a n d l a b o r c o s t o f oo t l s u s e d i n t r ns a p o r t a t i o n, wa r e h o u s i n g a n d d i s t r i b u —
( S c h o o l o f E l e c t r i c a l E n g i n e e i r n g a n dA u t o ma t i o n , J i a n g x i U n i v e r s i t yo f S c i e n c e a n dT e c h n o l o g y ,
d e ti n i f c a t i o n mo d u l e ,b o u n d a r y d e t e c i t o n mo d u l e nd a v i s u a l a i d s . I t i s a i me d o t e n h nc a e he t s t a b i l i y t o f he t s y s t e m
Re s e a r c h a nd De s i g n o f I n t e l l i g e nt Ro bo t Po r t e r s
Xu We n h a o Luo Gu a n q i n g Che n Ya we n W a n g Ta o
n e e d o t c a r r y he t s i na g l r t a n s mi s s i o n s o u r c e nd a g r e a t l y i mp r o v e s t h e e x p e ie r n c e o f u s e r s . Ke y wo r d s: Re c o g n i t i o n S y s t e m; Ac t i v e F o l l o w; Mo o t Dr i v e r