Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置
Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置

Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置作者:tobeno321引言:Maxwell作为一款电磁仿真软件,给电机设计师们带来了极大的便利,但不少新手掌握起来还存在一些问题,本人针对这些问题,相应的做出了一些教程,仅供大家学习使用。
本期我们讲解表贴式永磁同步电机激磁方向的便捷设置。
RM模块能够根据用户输入电机的参数,自动生成电机的结构,永磁体的形状以及能够满足电机仿真的其他必要条件,但由于软件的局限性,往往不能完全满足用户的需求,这时候用户会选择自己导入电机结构来满足自己的需求,在这个过程中,会遇到各种问题,这里我们针对设置永磁体激磁方向问题来进行讨论。
一.内置式(插入式)永磁电机永磁体激磁方向设置此类永磁体形状(如图1所示)为规则的正方体结构,激磁方向设置方法相对简单,操作起来很快。
图1操作步骤:1.建立相对坐标系。
首先,为了避免混淆,删除RM生成的所有相对坐标系。
如图2所示,点击,开始建立相对坐标系。
选择永磁体的一角为相对坐标系坐标原点(点1),选择永磁体实际激磁方向上的另外一点为系的终点(点2)。
这样就建立起该块永磁体的激磁方向的相对坐标系。
图22.按照同样的方法设置其他几块永磁体激磁方向的相对坐标系,这里要注意,两块相邻的永磁体激磁方向要相反。
3.全部建完后,需要对永磁体的激磁方向进行选择。
选中永磁体,打开属性对话框,在选择相对坐标系,具体如图3所示,各个永磁体按设置顺序选择12345五个相对坐标系。
图3二.表贴式永磁电机永磁体激磁方向设置(平行充磁)与内置式(插入式)永磁电机永磁体形状不同,表贴式永磁电机的永磁体的形状为弧形,不能够采用那种直接在永磁体上建立坐标系的方法,需要做出辅助线来帮助建立。
这里以一台40极48槽电机为例进行说明。
这里展示该电机的1/8模型(如图4)。
图4具体步骤如下:1.以原点为定点,沿着X轴取任意长度,画一条直线,依此直线进行下一步操作。
ANSOFT软件在电机设计中的应用教程

建模过程中注意事项
物体必须封闭。 物体之间可以完全包含,不可以交叉。 物体边的分段数不可太低。 尽量避免过尖锐的物体,必要时要做钝化处理。 应用布尔运算后,原物体并不被删除,而是被指定为Non_model,物体处于隐藏状态。
建模基本操作
选择Model/Drawing Plane命令,设置模型的绘制 平面。选项中包括XY Plane和RZ Plane.
暂态场激励源为电流源,电压源以及外接电路。
4设定边界条件及激励源
电流源设置
4设定边界条件及激励源
电压源设置
4设定边界条件及激励源
外电路中设置激励源
4设定边界条件及激励源
两相导通的三相无刷直流电机
Ia Im Ix Im
I
b
Im
Iy Im
I
c
0
Iz 0
三相星接正弦永磁同步电机
Ia Im Ix Im
选择Model/Drawing Size重新定义模型区域的大 小。
选择Model/Drawing Units来定义模型所用的单位。 创建模型。建议通过画直线和圆弧来完成场域边
界的建立。 需要的时候,利用Edit,Reshape和Arrange菜单命
令修改你所建立的模型。
绕组注意事项
连接要正确。 尽量用不同颜色标明。 同相分组。
3设定模型材料属性(Setup Materials)
选中物体,从材料库中选择所需材料,点击“Assign”。 添加新材料 材料的属性也可以用函数来赋值。
排除物体 有些情况下,可能让一些物体不参加计算,这时,就可以利用排 除该物体来实现该目的。一种典型的情况是,对于一个闭合的场 域问题(如由第一类边界包围的一个电场区域)背景可以不参加 计算,这时就可以利用排除背景来实现。具体做法为:选择要排 除的物体,点击Exclude。可Include来恢复物体。
ANSYS-Maxwell-2D求解齿槽转矩的几种方法
ANSYS-Maxwell-2D求解齿槽转矩的几种方法ANSYS Maxwell 2D求解齿槽转矩的几种方法齿槽转矩是永磁电机特有的问题之一,是高性能永磁电机设计和制造中必须考虑和解决的关键问题。
其表现是当永磁电机绕组不通电时,永磁体和定子铁芯之间相互作用产生的转矩,它是永磁体与电枢齿之间相互作用力的切向分量引起的。
Maxwell 2D可以有效仿真得出永磁电机电磁方案的齿槽转矩,且方法较多。
本文以R17.2 RMxprt中的自带案例4极24槽“assm-1”为模板,介绍3种方法。
打开该案例后,首先将系统中的案例另存到工作目录下,然后在DesignSettings 中设置“Fractions 1”,计算并生成Maxwell 2D瞬态场算例。
复制该算例,将新算例修改为静磁场算例,并分别再复制一次静磁场和瞬态场算例,删除RMxprt 算例,按照图1重命名各个算例。
图1 算例重命名1静磁场扫描转子旋转角度首先选中转子轭和4个永磁体,做旋转操作,在弹出窗口中设置旋转角度为变量“my_ang”,并定义变量初始值为“0 deg”,如图2所示。
图5 结果调用界面重命名该结果报告为“Cogging_ Torque”,齿槽转矩结果如图6所示。
图6 扫描转子旋转角度所得齿槽转矩曲线值得注意的是,RMxprt一键有限元生成的表贴式永磁体充磁方向为径向充磁,其充磁方向由极坐标定义,即N极充磁方向为R的正方向,S极充磁方向为R的负方向,参考坐标系为“Global”坐标。
而实际工程中常常会遇到平行充磁的电机,对于平行充磁最常用的处理方式是建立参考坐标系,永磁体的充磁方向参考特定参考坐标系的X轴正方向。
而在上述操作中,参考坐标系无法跟随转子旋转,使用本方法分析平行充磁时的结果将是错误的,因此可以利用第2种方法分析齿槽转矩。
2静磁场扫描定子旋转角度打开“2_Cogging_Torque_MS_Stator”算例,首先选择“Stator”和所有的线圈,做旋转操作,设置旋转角度为变量“my_Stator_ang”,变量初始值为“0 deg”,如图7所示。
基于 Ansoft 的永磁同步电机退磁仿真分析

基于 Ansoft 的永磁同步电机退磁仿真分析摘要:为了保证永磁同步电机抗退磁能力仿真的准确性,本文提出了一种基于 Ansoft Maxwell 软件的永磁同步电机退磁仿真方法。
以12S10P磁同步电机为例(PMSM) ,首先详细的介绍了此退磁仿真的电磁设置;然后评估与验证了此退磁仿真方法的仿真值与实测值差异;最后提供了此仿真方法的问题与改进思路,为永磁同步电机退磁仿真提供了参考。
关键词:Ansoft;退磁引言在压缩机的应用工况下,为了保持整套系统的高可靠性,压缩机中所有零件都需要进行可靠性评估,使所有的零件都能保持在正常的状态下运行。
对于压缩机中的主要驱动零部件——电机来说,永磁体退磁是一个重要的指标[1]。
为了保证永磁同步电机按照设计的状态运行并达到设计的效果,永磁体需要在充磁饱和的状态下工作[2]。
当永磁同步电机转子永磁体发生不可逆退磁,整个电机将不再运行于最佳工作状态,进而影响到压缩机的性能。
因此对永磁同步电机进行抗退磁能力评估是一项重要的工作。
目前对于永磁同步电机的退磁电流的测试方法一般为:并接电机绕组某两相,给绕组通入电流使转子自动定位,并固定电机转子此时位置,随后通入反向电流,并对比测试通入退磁电流前后的线磁链值,以该值下降 3 % 为限定标准。
但是,目前采用的仿真分析方法为在永磁体上设定取样曲线,并计算施加退磁电流后取样曲线上剩磁回复值,按照剩磁平均值降低 3 % 为限定标准。
以上实验测试方法和仿真分析方法存在判定指标不一致的情况,因此为了提高仿真准确性以及仿真与测试的一致性,以及充分应用 Ansoft 的退磁仿真功能,本文对 Ansoft 的退磁仿真功能进行了研究。
1 Ansoft仿真分析软件退磁仿真1.1基本设置1.1.1电机退磁仿真工况电机运行状态按照正常的电机性能仿真设定,仿真模型为模拟电机正常运行并通入了较大电流时电机永磁体发生退磁的情况,按照 3 % 磁链降低为界限限定。
运用Ansoft14分析永磁同步电机的电磁特性
Topic – Motor Application Note
创建 2D 模型 (续)
选中物体 PhaseA, PhaseB 及 PhaseC, 右键单击并选中菜单栏 Edit > Duplicate > Around Axis 或使用工具栏图标 。在Angle栏中输入 45 ,单位为degrees , 在 total number栏中输入8。这就生成了我们所需的所有绕组。
1. Maxwell 选项窗口: 1. 左键单击 General Options 对话框 Use Wizards for data entry when creating new boundaries: Checked Duplicate boundaries with geometry: Checked 2. 左键单击 OK 键
Topic – Motor Application Note
减小 2D 模型的尺寸 (续)
选择 Polyline1, 右键单击并选中菜单栏 Edit > Sweep > Around Axis. 参数按下面所列出的输入:
重命名区域 Polyline1 为Region。确认我们所选用的材料为真空。同时,你可以通 过增加区域的透明度来改变其渲染效果。
将材料的属性由 vacuum 更改为 Copper。 选中 LapCoil1并将其颜色改为 yellow。
Ansoft Maxwell Field Simulator
Topic – Motor Application Note
创建 2D模型 (续)
选中物体 LapCoil1, 并将其沿Z轴方向旋转 7.5 度, 右键单击选中菜单项 Edit > Arrange > Rotate 或使用工具栏图标 。
maxwell软件- 调速永磁同步电机
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
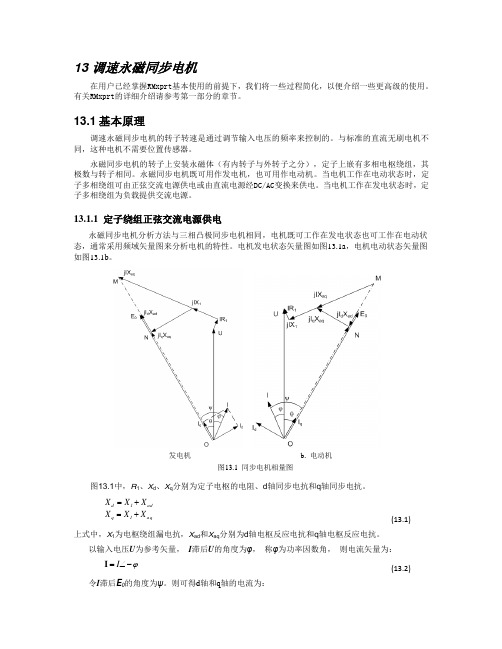
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
ansoft MAXWELL使用说明
Ansoft Maxwell 2D/3D 使用说明目录第1章Ansoft 主界面控制面板简介第2章二维(2D)模型计算的操作步骤2.1 创建新工程 (2)2.2 选择求解问题的类型 (3)2.3 创建模型(Define Model) (4)2.4 设定模型材料属性(Setup Materials) (6)2.5 设定边界条件和激励源(Setup Boundaries/Sources) (8)2.6 设定求解参数(Setup Executive Parameters) (9)2.7 设定求解选项(Setup Solution Options) (10)2.8 求解(Solve) (10)2.9 后处理(Post Process) (11)2.10 工程应用实例 (12)第3章三维(3D)模型计算的操作步骤3.1 建模 (14)3.2 定义材料属性 (17)3.3 加载激励和边界条件 (18)3.4 设置求解选项和求解 (18)3.5 后处理 (18)3.6 补充说明 (18)3.7 例 1 两电极电场计算 (18)第4章有限元方法简介4.1 有限元法基本原理 (22)4.2 有限元网格自适应剖分方法 (23)第1章Ansoft 主界面控制面板简介在Windows下安装好Ansoft软件的电磁场计算模块Maxwell之后,点击Windows 的“开始”、“程序”项中的Ansoft、Maxwell Control Panel,可出现主界面控制面板(如下图所示),各选项的功能介绍如下。
1.1 ANSOFT介绍Ansoft公司的联系方式,产品列表和发行商。
1.2 PROJECTS创建一个新的工程或调出已存在的工程。
要计算一个新问题或调出过去计算过的问题应点击此项。
点击后出现工程控制面板,可以实现以下操作:●新建工程。
●运行已存在工程。
●移动,复制,删除,压缩,重命名,恢复工程。
●新建,删除,改变工程所在目录。
2020年整理MAXWELL2D,3D使用说明.pdf

Ansoft Maxwell 2D/3D 使用说明目录第1章Ansoft 主界面控制面板简介第2章二维(2D)模型计算的操作步骤2.1 创建新工程 (2)2.2 选择求解问题的类型 (3)2.3 创建模型(Define Model) (4)2.4 设定模型材料属性(Setup Materials) (6)2.5 设定边界条件和激励源(Setup Boundaries/Sources) (8)2.6 设定求解参数(Setup Executive Parameters) (9)2.7 设定求解选项(Setup Solution Options) (10)2.8 求解(Solve) (10)2.9 后处理(Post Process) (11)2.10 工程应用实例 (12)第3章三维(3D)模型计算的操作步骤3.1 建模 (14)3.2 定义材料属性 (17)3.3 加载激励和边界条件 (18)3.4 设置求解选项和求解 (18)3.5 后处理 (18)3.6 补充说明 (18)3.7 例 1 两电极电场计算 (18)3.8 例 2 电压互感器下半部分电场计算 (22)第4章有限元方法简介4.1 有限元法基本原理 (28)4.2 有限元网格自适应剖分方法 (29)第1章Ansoft 主界面控制面板简介在Windows下安装好Ansoft软件的电磁场计算模块Maxwell之后,点击Windows 的“开始”、“程序”项中的Ansoft、Maxwell Control Panel,可出现主界面控制面板(如下图所示),各选项的功能介绍如下。
1.1 ANSOFT介绍Ansoft公司的联系方式,产品列表和发行商。
1.2 PROJECTS创建一个新的工程或调出已存在的工程。
要计算一个新问题或调出过去计算过的问题应点击此项。
点击后出现工程控制面板,可以实现以下操作:⚫新建工程。
⚫运行已存在工程。
⚫移动,复制,删除,压缩,重命名,恢复工程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置
作者:tobeno321
引言:Maxwell作为一款电磁仿真软件,给电机设计师们带来了极大的便利,但不少新手掌握起来还存在一些问题,本人针对这些问题,相应的做出了一些教程,仅供大家学习使用。
本期我们讲解表贴式永磁同步电机激磁方向的便捷设置。
RM模块能够根据用户输入电机的参数,自动生成电机的结构,永磁体的形状以及能够满足电机仿真的其他必要条件,但由于软件的局限性,往往不能完全满足用户的需求,这时候用户会选择自己导入电机结构来满足自己的需求,在这个过程中,会遇到各种问题,这里我们针对设置永磁体激磁方向问题来进行讨论。
一.内置式(插入式)永磁电机永磁体激磁方向设置
此类永磁体形状(如图1所示)为规则的正方体结构,激磁方向设置方法相对简单,操作起来很快。
图1
操作步骤:
1.建立相对坐标系。
首先,为了避免混淆,删除RM生成的所
有相对坐标系。
如图2所示,点击,开始建立相对坐标系。
选择永磁体的一角为相对坐标系坐标原点(点1),选择永磁体实际激磁方向上的另外一点为系的终点(点2)。
这样就建立起该块永磁体的激磁方向的相对坐标系。
图2
2.按照同样的方法设置其他几块永磁体激磁方向的相对坐标系,这里要注意,两块相邻的永磁体激磁方向要相反。
3.全部建完后,需要对永磁体的激磁方向进行选择。
选中永磁体,打开属性对话框,在选择相对坐标系,具体如图3所示,各个永磁体按设置顺序选择12345五个相对坐标系。
图3
二.表贴式永磁电机永磁体激磁方向设置(平行充磁)
与内置式(插入式)永磁电机永磁体形状不同,表贴式永磁电机的永磁体的形状为弧形,不能够采用那种直接在永磁体上建立坐标系的方法,需要做出辅助线来帮助建立。
这里以一台40极48槽电机为例进行说明。
这里展示该电机的1/8模型(如图4)。
图4
具体步骤如下:
1.以原点为定点,沿着X轴取任意长度,画一条直线,依此直线进行下一步操作。
2.计算第一块永磁体轴线与X轴的夹角。
这里的夹角为360/40/2=4.5.选中该直线,右键>Edit>arrange>rotate,或直接点击图标,弹出
对话框,输入4.5度,进行旋转操作。
这样,这条线就移动到第一块永磁体轴线上。
如图5所示。
图5
3.建立相对坐标系。
我们沿着直线做坐标系方向与在永磁体上建立效果一致,但位置更加容易寻找,效果如图6所示
图6
4.重复旋转直线,依次建立各个永磁体的相对坐标系,余下过程同上。
但需注意,进行旋转前,需选定全局坐标系,以免出现错误。
5.按照上述方法,给每个永磁体按顺序设置激磁方向。
总结
本文提供了两类永磁体激磁方向的便捷设置方法,能为建模仿真过程带来一定的帮助,但软件自动生成的坐标系不是总不能用的,需
要用户进行甄别,对于能够继续使用的坐标系,有效利用更有助于加快仿真效率。