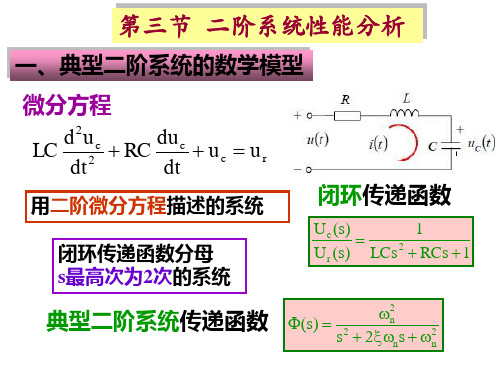
欠阻尼二阶系统动态过程分析
二阶系统的单位阶跃响应欠阻尼状态曲线
二阶系统的单位阶跃响应欠阻尼状态曲线一、引言在控制理论中,二阶系统的单位阶跃响应欠阻尼状态曲线是一个重要的概念。
它反映了一个系统在欠阻尼状态下对输入信号的响应情况,是探讨系统稳定性、振荡特性和动态响应的重要工具。
本文将从二阶系统的定义开始,逐步深入探讨其单位阶跃响应欠阻尼状态曲线的特点和意义。
二、二阶系统的定义二阶系统是指具有两个自由度的动态系统,它可以用微分方程描述其动态特性。
在控制理论和工程实践中,二阶系统的表现形式多种多样,例如振动系统、电气系统、机械系统等等。
在对二阶系统进行分析时,常常需要了解它的单位阶跃响应欠阻尼状态曲线,以便全面理解系统的动态特性。
三、单位阶跃响应欠阻尼状态曲线的特点对于一个欠阻尼的二阶系统,其单位阶跃响应曲线常常呈现出以下特点:1. 振荡幅度大:由于缺乏阻尼,系统在受到单位阶跃输入后会出现明显的振荡,振荡幅度通常较大。
2. 振荡频率高:欠阻尼状态下,系统的自然频率对振荡频率的影响比较明显,常常表现为振荡频率较高。
3. 衰减缓慢:缺乏阻尼导致单位阶跃响应的振荡幅度衰减较慢,系统的响应时间较长。
以上特点使得欠阻尼的二阶系统在实际控制和工程应用中需要特别注意,因为它的振荡特性可能对系统的稳定性和性能产生重要影响。
四、单位阶跃响应欠阻尼状态曲线的意义通过对欠阻尼的二阶系统单位阶跃响应曲线的分析,我们可以深刻理解系统的振荡特性和动态响应特点。
这对于控制系统的设计和优化具有重要意义。
在实际工程中,我们常常需要针对欠阻尼的系统进行补偿和控制,以确保系统的稳定性和性能。
了解单位阶跃响应欠阻尼状态曲线的意义是至关重要的。
五、个人观点和理解作为文章撰稿人,我个人认为深入理解二阶系统的单位阶跃响应欠阻尼状态曲线对于控制理论和工程应用都具有重要意义。
通过对系统振荡特性和动态响应的深入分析,我们可以更好地设计控制算法和优化系统性能。
在工程实践中,对于欠阻尼系统的控制和补偿也需要特别注意,以确保系统的稳定性和可靠性。
欠阻尼二阶系统单位脉冲响应
欠阻尼二阶系统单位脉冲响应单位脉冲响应是指系统在接收到单位脉冲输入信号时的输出响应。
欠阻尼二阶系统是一种动态系统,其特点是系统的振荡幅度会逐渐减小,并最终稳定在零附近。
本文将以欠阻尼二阶系统的单位脉冲响应为主题,介绍其基本原理和特性。
我们将从系统的基本概念开始,介绍欠阻尼二阶系统的工作原理。
欠阻尼二阶系统由两个质量相同的弹簧和一个质量为m的物体组成。
当物体受到外力作用时,它会振动,并且受到弹簧的阻尼作用。
系统的单位脉冲响应是指当单位脉冲信号作用于系统时,系统的输出响应。
接下来,我们将探讨欠阻尼二阶系统的单位脉冲响应的特点。
由于系统的阻尼作用,单位脉冲信号在系统中引起的振动会逐渐减小,最终趋近于零。
这是因为阻尼的存在使得振动能量逐渐转化为热能而耗散掉。
因此,欠阻尼二阶系统的单位脉冲响应呈现出渐进衰减的特性。
我们还可以通过观察单位脉冲响应的时域波形来了解系统的动态特性。
在欠阻尼二阶系统中,单位脉冲信号引起的振动会在一段时间内达到最大值,然后逐渐衰减。
振动的衰减速度取决于系统的阻尼比,阻尼比越小,振动衰减得越慢。
欠阻尼二阶系统的单位脉冲响应还可以通过频域分析来研究。
频域分析可以将系统的输出响应表示为频率的函数。
在欠阻尼二阶系统中,单位脉冲信号引起的振动会在一定频率范围内出现。
这些频率成为系统的固有频率,可以通过频域分析来确定。
我们还可以通过比较不同阻尼比下的单位脉冲响应来研究欠阻尼二阶系统的稳定性。
当阻尼比越小时,系统的振动衰减得越慢,系统越不稳定。
因此,在设计和分析欠阻尼二阶系统时,我们需要考虑阻尼比对系统稳定性的影响。
欠阻尼二阶系统的单位脉冲响应是系统在接收到单位脉冲输入信号时的输出响应。
它具有渐进衰减的特点,并且可以通过时域波形和频域分析来研究。
阻尼比对系统的稳定性也有重要影响。
在实际应用中,我们可以利用单位脉冲响应来分析和控制欠阻尼二阶系统的动态特性,以满足系统设计和性能要求。
自动控制原理第三章3.3
h(t ) 1
1 1
2
e
n t
sin( d t )
弧度
d
三、欠阻尼二阶系统动态性能计算
令 h(t ) 1取其解中的最小值,
tr
令h(t)一阶导数=0,取其解 得 t p 中的最小值 d cos 所以 cos
附加零点对过阻尼二阶系统的影响
σ%=33%
j 0
无振荡有超调
0.333
结论:
ts可能大了可能小了 上升时间减小
1 零点有削弱阻尼的作用 2 零点越靠近原点该作用越明显
附加零点对欠阻尼二阶系统的影响
j 0
四、二阶系统性能的改善
常用附加装置有比例微分环节和微分负反馈 环节,通过附加的装置改变系统的结构,从而达 到改善系统性能的目的.
75 t rຫໍສະໝຸດ t r 1 d .9tp tp
d 1 .9
tts
s
?0 . 5
n
3 3
% e % e
tg tg 75
e ss 0
例 已知系统的闭环传递函数 ,当 K K= 2, K = 4 时,求系统的单位阶跃 Ф(s)= s2 +3s+K 响应和σ% ,ts 。
R(s)
s 1
n
2
C(s)
s ( s 2 n )
2
j
临界阻尼
s 2 s1
1
0
1
0
s1, 2 n n 1
j
1
s1, 2 n
j
欠阻尼 s
无阻尼
n 1
欠阻尼二阶系统动态性能分析与计算

1+ lim k s→0 sν r(t)=Rt R(s)=R/s2 R ess= k lim s ν s s→0 r(t)=Rt2/2 R(s)=R/s3 ess= R
lim
s→0
s2
k sν
取不同的 ν
R1(t)
0型 Ⅰ型 Ⅱ型
Rt
Rt2/2
R1(t)
Rt
Rt2/2
R 1+ k
∞
R k
∞ ∞
R k R
1 右移一位降两阶 2 每两行个数相等 3 行列式第一列不动 +8 ε -8(2ε+8)7 4 次对角线减主对角线 -7 ε 分母总是上一行第一个元素 5 2 ε 6 一行可同乘以或同除以某正数 7 第一列出现零元素 时, 用正无穷小量ε代
劳斯判据
系统稳定的必要条件: s6 1 特征方程各项系数 均大于零!
ξ ωn ωn
传递函数:
A Φ(s)= S+a
运动模态1
K(t)=Ae-at
零极点分布图:
j
-a
0 0
传递函数:
A1s+B1 Φ(s)=(S+a)2+b2
运动模态2
K(t)=Ae-atsin(bt+α)
零极点分布图:
j b -a 0 0
t
运动模态3
传递函数:
A1s+B1 Φ(s)= S2+b2
欠阻尼二阶系统动态性能分析与计算动态性能指标定义1100ba峰值时间tp间trb调节时间ts动态性能指标定义2调节时间ts上升时间tr动态性能指标定义3brabtrtpts一阶系统时域分析无零点的一阶系统ts1画图时取k1t05ht0632hh2t0865hh3t095h二阶系统单位阶跃响应定性分析21200s12212n2112ht0112ncosnt0欠阻尼二阶系统动态性能分析与计算1取其解中的最小值s121sindt欠阻尼二阶系统的tsht1ent取误差带为005则有ent005ln201235由此解出ts运动模态1ktaeat零极点分布图
二阶欠阻尼系统阻尼比和固有频率

二阶欠阻尼系统中的阻尼比和固有频率是控制系统工程中非常重要的概念。
它们在系统动态特性分析中起着至关重要的作用,对系统的稳定性和性能有着决定性的影响。
本文将从简单到复杂,由表面到深入,逐步探讨二阶欠阻尼系统的阻尼比和固有频率,希望能帮助读者更深入地理解这一概念。
1. 什么是二阶欠阻尼系统?在控制系统中,二阶欠阻尼系统是指具有两个自由度的系统,它具有两个特征的物理量,比如位移和速度。
在动态系统中,二阶系统常常出现,比如弹簧振子系统、RLC电路等。
二阶系统的传递函数通常可以表示为一个二次方程。
2. 阻尼比和固有频率的概念阻尼比是描述系统阻尼程度的一个重要参数,它是实际阻尼比与临界阻尼比的比值。
固有频率则是系统自由振荡的频率,在没有受到外界干扰的情况下,系统将以固有频率进行振荡。
3. 阻尼比和固有频率的影响阻尼比和固有频率对于二阶系统的动态特性有着重要的影响。
在阻尼比小于1的情况下,系统呈现欠阻尼振荡的特性;而在阻尼比大于1的情况下,系统则呈现着过阻尼的特性。
固有频率则决定了系统振荡的频率,它越高表示系统越“硬”、振荡的速度越快。
4. 个人观点和理解在控制系统工程中,对于二阶欠阻尼系统的阻尼比和固有频率的理解是非常重要的。
它们直接关系到系统的稳定性和性能,因此在系统设计和分析中必须充分考虑这些因素。
阻尼比和固有频率的合理选取不仅能保证系统的稳定性,还能够提高系统的响应速度和抑制振荡,从而更好地实现控制的目标。
总结与回顾:通过本文的阐述,相信读者对二阶欠阻尼系统的阻尼比和固有频率有了更深入的理解。
在实际控制系统工程中,我们需要根据具体的需求和要求来选择合适的阻尼比和固有频率,从而实现系统的稳定性和性能优化。
希望本文可以为读者对这一主题的理解和应用提供一些帮助。
通过以上的介绍,相信您已经对二阶欠阻尼系统的阻尼比和固有频率有了更深入的理解。
在实际工程中,合理选择阻尼比和固有频率将对系统的控制性能产生重要影响。
实验二二阶系统阶跃响应

实验二二阶系统阶跃响应一、实验目的1. 研究二阶系统的特征参数,阻尼比ζ和无阻尼自然频率ωn对系统动态性能的影响,定量分析ζ和ωn与最大超调量σp和调节时间ts之间的关系。
2. 进一步学习实验系统的使用。
3. 学会根据系统的阶跃响应曲线确定传递函数。
4. 学习用MATLAB仿真软件对实验内容中的电路进行仿真。
二、实验原理典型二阶闭环系统的单位阶跃响应分为四种情况:1〕欠阻尼二阶系统如图1所示,由稳态和瞬态两部分组成:稳态部分等于1,瞬态部分是振荡衰减的过程,振荡角频率为阻尼振荡角频率,其值由阻尼比ζ和自然振荡角频率ωn决定。
〔1〕性能指标:: 单位阶跃响应C(t)进人±5%(有时也取±2%)误差带,并且不再超出该误差带的调节时间tS最小时间。
超调量σ% ;单位阶跃响应中最大超出量与稳态值之比。
单位阶跃响应C(t)超过稳态值到达第一个峰值所需要的时间。
峰值时间tP :结构参数ξ:直接影响单位阶跃响应性能。
〔2〕平稳性:阻尼比ξ越小,平稳性越差长,ξ过大时,系统响应迟钝,〔3〕快速性:ξ过小时因振荡强烈,衰减缓慢,调节时间tS调节时间t也长,快速性差。
ξ=调节时间最短,快速性最好。
ξ=时超调量σ%<5%,平稳性也S好,故称ξ=为最正确阻尼比。
2〕临界阻尼二阶系统〔即ξ=1〕系统有两个相同的负实根,临界阻尼二阶系统单位阶跃响应是无超调的,无振荡单调上升的,不存在稳态误差。
3〕无阻尼二阶系统〔ξ=0时〕 此时系统有两个纯虚根。
4〕过阻尼二阶系统〔ξ>1〕时此时系统有两个不相等的负实根,过阻尼二阶系统的单位阶跃响应无振荡无超调无稳态误差,上升速度由小加大有一拐点。
三、 实验内容1. 搭建模拟电路典型二阶系统的闭环传递函数为:其中,ζ 和ωn 对系统的动态品质有决定的影响。
搭建典型二阶系统的模拟电路,并测量其阶跃响应:二阶系统模拟电路图其结构图为:系统闭环传递函数为:式中, T=RC ,K=R2/R1。
欠阻尼

开环增益 K 0
( s)
K B K0 KB T 2 1 s(Ts 1) K 0 s s 1 K0 K0
KB
K 0 变化→特征多项式系数变化→特征根变化→ h(t ) 变 Nhomakorabea→性能变化
开环增益变化对性能的改善是有限的,指标对 K 0 的要求 往往是矛盾的只能采取折中方案,兼顾不同的要求。
2
sin t cos t
(s2 2 ) s (s2 2 )
n s s n 2 (n 1 2 ) 2 s n 2 (n 1 2 ) 2
s n n 1 2 2 s s n d s n 2 d 2
增加极点是削弱了阻尼 结论1: 还是增加了阻尼? 结论2: 增加的极点越靠近原点 越怎样?
0 j
0
两种控制方案的比较
两种控制方案兼顾了系统的响应的快速性和平稳性
(1)微分控制作用于系统输入,速度反馈作用于系统输出,在相同 阻尼程度下,微分控制将比速度反馈控制产生更大的阶跃响应超调 量。 (2)微分作用对输入噪声有明显的放大作用,当输入端噪声严重时,
例
给定典型二阶系统的设计指标:超调量 % 5% 调节时间 t s 3s 峰值时间 t p 1s
试确定系统极点配置的区域,以获得预期的响应特性。 解 : 依题
% 5%
0.707 ( 45)
ts 3.5
n
3
,
n 1.05
1 2 n 3.14
;
tp
1 2n
1
06年
上升时间tr
y (tr ) 1
3.3二阶系统的动态性能(上)解析
s 2n 1 s [( s n ) jd )][( s n ) jd ]
s 2n 1 s 2n 1 s ( s n )2 ( jd )2 s ( s n )2 d 2
at
s n n 1 s (s n )2 d 2 (s n )2 d 2 n 1 2 1 s n 1 2 2 s ( s n ) d ( s n )2 d 2
5.84 n ts 4.75 n
4、稳态误差为0,说明典型二阶系统跟踪阶跃输入信号时,无稳态误差, 系统为无静差系统。
4.过阻尼(ζ>1)状态
闭环特征方程
特征根
2 s 2 2n s n 0
s1 n n 2 1
s2 n n 2 1
nt
d
L[e at cos t ]
上式取拉氏反变换,得
y(t ) 1 e
1 1
cos d t
1
2
sa ( s a)2 2 L[e at sin t ] ( s a)2 2
ent sin d t
e nt 1 2 e
Δ 2 Δ 5
4T1 1.25 ts 3T 1
Δ 2 Δ 5
1.34
3、稳态误差为0,说明典型二阶系统跟踪阶跃输入信号时,无稳态误 Y(t) 差,系统为无静差系统。
2
4、需要说明的是,对于临界阻尼和过阻 尼的二阶系统,其单位阶跃响应都没有 振荡和超调,系统的调节时间随ζ的增加 而变大,在所有无超调的二阶系统中, 临界阻尼时,响应速度最快。
2 n 1 1 s Y ( s ) ( s ) R( s ) 2 2 2 s n s s s 2 n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阻尼比希望值为(0.4~0.8)
动态指标:tr 、 tp 、 p %、ts
(1)上升时间trc(t) 1
e nt
1 2
s in( d t
)
tg1
1 2
d n
1 2
依定义,令c(t)=1, c(tr ) 1
因为
entr
1 2
0
,有s in( d t
r
若 lim c(t) 0 t
(渐近)稳定
若 lim c(t)
t
系统不稳定
若 lim c(t) A
t
临界稳定
非零常数
设若n阶全系部统特表征达根式有为负实部,则
(sl)im t
CcR(((tss)))
0ba00ssmn
b1s m 1 a1s n 1
( 渐 近bamn)11ss 稳 ab定mn
(2)K=16,T=0.25,得
0.25 n 8
将n 、 代入动态性能指标公式得
tr
d
0.24(s)
p % e / 1 2 100% 44%
tp
d
0.41(s)
ts
3.5
n
1.75(s)
( 0.05)
例3.7 系统及阶跃响应曲线如图 示,求K1、K2和a。
R(s) k1 _
有
e nt
1
2
sin(d t
)
(t ts )
所以
ent
1 2
sin(d t
)
ent
1 2
即
取 =0.707得
因为ts
3.5
snin((d t=5% ))
1
e nt
1 2
(t ts )
通常用包络线代替实际曲线估算ts, c(t)
如右图一对包络线
ents
包络线 1
1
1
1 2
ln ln 1 2
entr
1
)
2 sin(d
0
tr
)
1
j
即 dtr k (k 0,1, 2 )
取k=1,得
cos1
tr d
n 1 2
s1
jd
=cos ωn
0
-n
ξ一定时,ωn越大,tr越小 ωn一定时,ξ越大,tr越大
s2 欠阻尼二阶系统的特征参量
(2)峰值时间tp
c(t) 1
ent
1 2
e
1 2 100%
p% 仅与阻尼比ξ有关。
ξ越大, p %越小,系统 的平稳性越好.
ξ = 0.4~0.8 p %= 25.4%~1.5%。
(3)调整时间ts
c(t) 1
ent
1 2
sin(d t
)
单位阶跃响应进入± 误差带的最小时间。
(t 0)
依定义 c(t) c() c()
(t ts )
(m≤n)
j 1
k 1
其中 0 k 1
qlim2 c (nt拉) 氏A反变换为
t
临界稳定
大范围稳定 小范围稳定
图示用曲线表示稳定性的概念和定义
r(t)
r(t)
C(t)
(a)外加扰动
C(t)
C(t)
(b)稳定
(c)不稳定 注意:仅适用于线性定常系统
3.5.2线性系统稳定的充要条件
稳定的条 系统件初始条件为零时,受到δ( t)的作用,输出 c(t)为
单位脉冲响应,这相当于系统在扰动作用下,输出信号偏 离平衡点的问题,当t→∞时,
例3.5 如图示,(1)求特征参数与实际参数的关系; (2)K=16,T=0.25,计算动态性能指标。
解:(1)
(s)
Ts2
K s
K
K /T s2 s/T K /T
R(s)
-
k
C(s)
s(Ts 1)
与典型二阶系统比较,得
1 T 2 n
K T n2
特征参数与实际参数的关系为 1
2 KT
n K T
K2
C(s)
s(s a)
解:由图(b) 得 c() 2
(a)
tp
0.8(s)
%
2.18 2 2
0.09
系统输出
C(s)
(s)
R(s)
s(s2
K1K2 as
K2)
C(t) 2.18
2
c()
lim
s0
sC
(
s)
K1
(0)
得K1=2。是闭跃响应的稳态输出值
ts
n
0
e- nt 1
1 2
包络线 T 1
n
e- nt 1
1 2
t
小结
1、二阶系统的动态性能由ωn和决定。 2、增加 降低振荡,减小超调量 p %, 系统快速性降低,tr、tp增加;
3、 一定,ωn越大,系统响应快速性越好, tr、tp、 ts越小。
4、 p %仅与有关,而tr、tp、ts与 、ωn有关,通 常根据允许的最大超调量来确定 。 一般选择 在0.4~0.8之间,然后再调整ωn以获得合适的瞬 态响应时间。
稳 定 的 摆
不 稳 定 的 摆
不论扰动引起的初始偏差有 多大,扰动取消后,系统都能 够恢复到原有的平衡状态是大 范围稳定。
小扰动恢复到原平衡状态, 大扰动不能恢复到原平衡状 态,系统为小范围稳定。
线性系统,小范围稳定, 必然大范围稳定。
扰动消失后,输出与原平衡 状态间存在恒定的偏差或输出 维持等幅振荡,系统处于临界 稳定状态。 经典控制论中,临界稳定视 为不稳定。
tp是阻尼振荡周期的一半
(3)超调量 p %
c(t) 1
ent
1 2
sin(d t
)
依定义将
tp
d
n
1 2
代入上式
得 c(tp ) 1
1 e / 1 2 sin( ) 1 e / 1 2 1 2
(t 0) (t 0)
最大超调量百分比为
p
%
c(t
p ) c() c()
100%
由超调量和峰值时间公式得
ln 2 2 ln 2
0.608
ln 2 2 ln 2
0.608
2n a n2 K2
得K2=24.46 , a=6.01。
3.5线性系统的稳定性分析
35.1 稳定性概念及定义
系统受到扰动偏离了平衡状态,扰动消失后,又恢复到 平衡状态,称系统是稳定的。 线性系统的稳定性由系统的结构和参数决定,与初始条 件及外作用无关。
sin(d t
)
(t 0)
依定义,令上求导式为零。得
dc(t ) dt |t t p 0
s1 =cos
j jd ωn 0
所以
ent p n 1 2
sin(dt p
)
0
-n s2
因为
entp n
0
1 2
有 sin d t p 0
即 dt p 0, ,2 ...
得
tp
d
n
1 2
ξ一定时,ωn越大,tp越小;ωn 一定时,ξ越大,tp越大。
理想有脉一冲个函或数一作个用以下上R正(s实)=1根,输或出实量部的为拉正氏的变共换轭为复根,其余
C有的(s)一根 个具(或有s)R一负(tls i个实)m以部cin1(上,t则()s零Ais实i ) 部 根q (,s 其s j余)K系r的im统(1s具(2不s有稳2z负i )定k实k s部 k2)