机器人学基础 第8章 机器人编程 蔡自兴
机器人学基础 第5章 机器人控制 蔡自兴

5.1.1 Basic Control Principles
控制层次 Control Levels
1st Grade: Artificial Intelligence level 2nd Grade: Control model level 3rd Grade: Servo system-level
5.1 Basic Principles of Robot Control
10
5.1.1 Basic Control Principles
Industrial robot controller can be divided into singlejoint (link) controller and multi-joint (link) controller. Robot control depends on its "head", that the development of the processor. Various control methods can be used according to the actual working conditions.
Robot Hubo
Made in China Trained in USA
Fundamentals of Robotics
3
HUBO Robot
Hero,I’m Hubo. I am a very unique robot. The more we play the more I can do! I can play games, dance and even sing to you! Let’s be good friends!
Manipulator consists of a series of links, whose dynamic characteristics are highly non-linear. We need to build up the mathematical model to control the motor-driven manipulator. Two assumptions in the designing of model:
机器人学蔡自兴课后习题答案电子教案

机器人学蔡自兴课后习题答案其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA BA = ; 其中 ),(),(φθx Rot z Rot T AB = 。
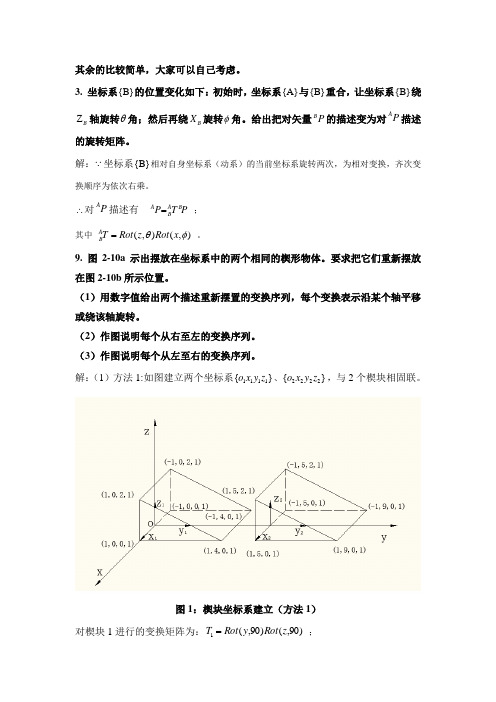
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111zyxo、}{2222zyxo与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1zRotyRotT=;对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(ooo2--=zRotxRotyRotTransTransT;所以:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=11111T;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=1911212T。
机器人学基础 第1章 绪论 蔡自兴0

Robots
Robotics and AI
Ch. 1 Introduction
16
Ch. 1 Introduction
17
1 The U.S. "Big Dog"
In March 2008, the U.S. government released a video of the military robots called "Big Dog", which has amazing mobility and adaptability. Latest "Big Dog" can climb up 35 ° slopes, carry more than 40 kg equipment, representing about 30% of its weight It can move along a simple route, or by remote control.
Ch. 1 Introduction
23
7 Robot World Cup held in China for the first time
China successfully held the Robot World Cup through July 14-20, 2008 for the first time.
9 12
1
2 2
机器人学的数学基础
数学基础/机器人运动学 机器人运动学
2
2 2
讲授
讲授 讲授
3
3 3
16
19 23
3
3 4
机器人动力学
机器人控制(1) 机器人控制(2)
2
2 2
机器人学基础机器人动力学蔡自兴课件

contents
目录
• 机器人动力学概述 • 机器人动力学建模 • 机器人运动学与动力学关系 • 机器人动力学仿真与实验验证 • 机器人动力学在智能控制中应用 • 总结与展望
01
机器人动力学概述
机器人动力学定义 01 02
机器人动力学研究内容01源自动力学建模机器人运动学与动力学关系分析
运动学方程与动力学方程的关系
运动学方程描述了机器人的运动学特性,而动力学方程描述了机器人的动态特性,两者相互关联,共同决定了机 器人的运动行为。
运动学参数对动力学性能的影响
机器人的运动学参数,如连杆长度、关节角度范围等,对机器人的动力学性能有重要影响,如惯性、刚度等。
基于运动学的机器人动力学控制策略
仿真结果展示与分析
轨迹跟踪性能
01
动态响应特性
02
关节力矩变化
03
实验验证方案设计与实施
实验平台搭建 实验参数设置 数据采集与分析
05
机器人动力学在智能控制中应用
智能控制算法在机器人动力学中应用
模糊控制
01
神经网络控制
02
遗传算法优化
03
基于深度学习的机器人动力学控制策略
深度学习模型构建 数据驱动控制 自适应控制
基于运动学的轨迹规划
基于动力学的控制策略
04
机器人动力学仿真与实验验证
机器人动力学仿真方法介绍
动力学模型建立
根据拉格朗日方程或牛顿-欧拉方程,建立机器 人的动力学模型。
仿真软件选择
选择MATLAB/Simulink、ADAMS等仿真软件 进行动力学仿真。
参数设置与初始条件
设定机器人的物理参数、运动范围、初始状态等。
机器人学基础
命令以指令形式给出,由解释程序来解释
系统提供的基本指令 使用者定义的用户指令
第八章 机器人编程
16
IML语言
用户利用该语言给出机器人的工作点、操作路线, 或给出目标物体的位置、姿态,直接操纵机器人 IML语言还具有的特征
描述往返运作可以不用循环语句 可以直接在工作坐标系内使用
8.4 机器人的离线编程 21
机器人离线编程的特点和主要内容
离线编程系统的主要内容
机器人工作过程的知识 机器人和工作环境三维实体模型 机器人几何学、运动学和动力学知识 基于图形显示和可进行机器人运动图形仿真的关于上述内 容的软件系统 轨迹规划和检查算法 传感器的接口和仿真,以用传感器信息进行决策和规划 通讯功能,进行从离线编程系统所生成的运动代码到各种 机器人控制柜的通讯 用户接口,提供有效的人机界面,便于人工干预和进行系 统的操作
第八章 机器人编程
20
机器人离线编程的特点和主要内容
表8.4 两种机器人编程的比较
离线编程的优点
可减少机器人非工作时间,当对下一个任务进行编程时, 机器人仍可在生产线上工作 使编程者远离危险的工作环境 使用范围广,可以对各种机器人进行编程 便于和CAD/CAM系统结合做到CAD/CAM/机器人一体 化 可使用高级计算机编程语言对复杂任务进行编程 便于修改机器人程序
构型的三种主要方式
结构立体几何表示 扫描变换表示 边界表示
边界表示最便于形体在计算机内表示、运算、修改和显示 结构立体几何表示所覆盖的形体种类较多 扫描变换表示则便于生成轴对称的形体 机器人系统的几何构型大多采用这三种形式的组合
8.4 机器人的离线编程 24
机器人离线编程系统的结构
机器人学基础 第8章 机器人编程 蔡自兴

语言名称 AL
AUTOPASS LAMA-S VAL ARIL WAVE DIAL RPL TEACH
国家 美
美 美 美 美 美 美 美 美
研究单位 Stanford AI Lab.
IBM Watson Research Lab. MIT Unimation公司 AUTOMATIC公司 Stanford AI Lab. Charles Stark Draper Lab. Stanford RI Int. Bendix Corporation
12
8.1.2 Types of Robot Programming
根据作业描述水平的高低,机器人编程语言可以分为:
Motion-level programming (动作级)
以机器人关节或末端执行器的动作为中心来描述各种操作;
Object-level programming (对象级)
以描述操作物体之间的关系为中心的语言;
10
8.1.2 Types of Robot Programming 机器人编程的类型
根据编程方式,机器人编程可以分为:
Teach by showing (示教编程)
手把手示教
示教盒示教
Robot programming languages (机器人语言编程)
用专用的或通用的机器人语言来描述机器人的动作轨迹
(b) State B
(Block1-face1 AGAINST Table) (Block1-face3 AGAINST Block2-face1) (Block2-face3 AGAINST Block3-face1)
8.1 Requirements and Types of Robot Programming Languages
机器人学基础机器人轨迹规划蔡自兴课件

Part
02
机器人轨迹规划概述
轨迹规划的定义
轨迹规划是指根据机器人作业任务的 要求,通过一系列算法和计算,为机 器人确定从起始位置到目标位置的路 径和姿态变化过程。
轨迹规划的主要目标是确保机器人在 运动过程中安全、平稳、高效地完成 作业任务,同时避免与环境和其他物 体发生碰撞。
轨迹规划的分类
01
03
总结词:权威性强
THANKS
感谢您的观看
机器人轨迹规划的挑战与展望
面临的挑战
环境不确定性
机器人所处的环境常常具有不确 定性,如障碍物突然出现、动态 变化等,需要机器人具备快速适 应和调整的能力。
实时性要求
许多应用场景要求机器人的运动 轨迹规划具有实时性,能够快速 响应外界变化。
高精度要求
在某些应用场景中,如工业制造 、医疗手术等,机器人需要实现 高精度的轨迹跟踪和定位。
第三阶段
20世纪90年代,随着人工智能技 术的进步,机器人开始具备自主 学习和决策能力。
机器人的应用领域
工业领域
机器人广泛应用于汽车制造、电子制造、金 属加工等工业生产线上,提高生产效率和产 品质量。
服务领域
机器人可以提供各种服务,如家庭服务、餐饮服务 、医疗服务等,提高服务质量和效率。
军事领域
机器人可以用于军事侦察、排雷、攻击等任 务,提高军事行动的安全性和效率。
机器人学基础机器人 轨迹规划蔡自兴课件
• 机器人学基础概念 • 机器人轨迹规划概述 • 机器人轨迹规划技术 • 机器人轨迹规划的应用实例 • 机器人轨迹规划的挑战与展望 • 参考文献
目录
Part
01
机器人学基础概念
机器人的定义与分类
(完整版)机器人学蔡自兴课后习题答案
其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10009010000121002T 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Off-Line Programming of Robots
Summary
Ch.8 Robot Programming
18
8.3 Commonly Used Robot Programming Languages 常用的机器人编程语言
研究室里的实验语言
美国斯坦福大学开发的AL语言
IBM公司开发的AUTOPASS语言 英国爱丁堡大学开发的RAPT语言等;
8.2 Structure and Basic Functions of A Robot Programming System
16
8.2.2 Basic Functions of Robot Programming Languages
决策(Decision):是指机器人根据作业空间范围内的传感 信息而做出的判断决策。这种决策功能一般由条件转移 指令实现。 通信(Communication):即机器人系统与操作人员的各式 通信,包括机器人向操作人员要求信息和操作人员知道 机器人的状态、机器人的操作意图等。 传感数据处理(Sensor Data Processing):机器人只有与传 感器连接起来才能具有感知能力,具有某种智能。传感 器输入和输出信号的形式、性质及强弱不同,往往需要 进行大量的复杂运算和处理。
2
Questions
According to level of task description, how many categories can robot programming languages be split into? List out several commonly used robot programming languages. Comparison between off-line programming and teach by showing.
Ch.8 Robot Programming
5
8.1 Requirements to Robot Programming & Type of Languages 机器人编程要求和语言类型
8.1.1 Requirements to Robot Programming 对机器人编程的要求
World modeling 能够建立世界模型 Task specification 能够描述机器人的作业 Motion specification 能够描述机器人的运动 Flow of execution 允许用户规定执行流程
12
8.1.2 Types of Robot Programming
根据作业描述水平的高低,机器人编程语言可以分为:
Motion-level programming (动作级)
以机器人关节或末端执行器的动作为中心来描述各种操作;
Object-level programming (对象级)
以描述操作物体之间的关系为中心的语言;
Off-Line Programming of Robots
Summary
Ch.8 Robot Programming
14
8.2 Structure & Basic Functions of Robot Programming System 机器人语言系统的结构和基本功能
8.2.1 Structure of A Robot Programming System 机器人语言系统的结构
商用的机器人语言
由AL语言演变而来的VAL语言 日本九州大学开发的IML语言 IBM公司开发的AML语言等。
8.3 Commonly Used Robot Programming Languages
19
8.3 Commonly Used Robot Programming Languages
序号 1
包含断点调试功能,以及典型的编程支持(如文本编辑、调试程 序和文件系统等)。
Sensor integration
在编程和作业过程中,应便于人与机器人之间进行信息交换。
能与传感器进行信息交互,以此来控制程序的流程。
8.1 Requirements and Types of Robot Programming Languages
8.2 Structure and Basic Functions of A Robot Programming System
17
Contents
Requirements and Language Types to Robot Programming Structure and Basic Functions of Robot Language System Commonly-Used Language for Robot Programming
Task specification
{face 3}
{Block 2}
{Block 3}
{face 1}
{Block 1}
{Block 2} {Block 1}
{Table}
{Block 3}
{Table}
State A (a)
(Block1-face1 AGAINST Table) (Block1-face3 AGAINST Block2-face1) (Block3-face1 AGAINST Table)
10
8.1.2 Types of Robot Programming 机器人编程的类型
根据编程方式,机器人编程可以分为:
Teach by showing (示教编程)
手把手示教
示教盒示教
Robot programming languages (机器人语言编程)
用专用的或通用的机器人语言来描述机器人的动作轨迹
Task-level programming (任务级)
只要直接指定操作内容就可以了,为此,机器人必须一边思 考一边工作。
8.1 Requirements and Types of Robot Programming Languages
13
Contents
Requirements and Language Types to Robot Programming Structure and Basic Functions of Robot Language System Commonly-Used Language for Robot Programming
Off-line programming (离线编程)
在专门的软件环境支持下用专用或通用程序,在离线情况下 进行机器人轨迹规划编程
8.1 Requirements and Types of Robot Programming Languages
11
Teach by showing
8.1 Requirements and Types of Robot Programming Languages
World modeling
{Pin-grasp} z z {Fixture} y x x x y y z {Feeder}
z {Table} y x
8.1 Requirements and Types of Robot Programming Languages
7
8.1.1 Requirements to Robot Programming
Interpolated Calculation of Joint Trajectories
Planning of Cartesian Path Trajectories
Real Time Generation of Planning Trajectories
Fundamentals of Robotics
2 3 4 5 6 7 8 9
语言名称 AL
AUTOPASS LAMA-S VAL ARIL WAVE DIAL RPL TEACH
国家 美
美 美 美 美 美 美 美 美
研究单位 Stanford AI Lab.
IBM Watson Research Lab. MIT Unimation公司 AUTOMATIC公司 Stanford AI Lab. Charles Stark Draper Lab. Stanford RI Int. Bendix Corporation
(b) State B
(Block1-face1 AGAINST Table) (Block1-face3 AGAINST Block2-face1) (Block2-face3 AGAINST Block3-face1)
8.1 Requirements and Types of Robot Programming Languages
8
8.1.1 Requirements to Robot Programming
Motion specification 例. 机械手运动如下:(1)移至位置“goal1”;(2)再以 直线移至位置“goal2”;(3)不停顿地移动经过 “via1”,到达停止位置“goal3”。 用VAL-II语言: move goal1 moves goal2 move via1 move goal3 用AL语言(控制机械手garm): move garm to goal1; move garm to goal2 linearly; move garm to goal3 via via1;
Ch.8 Robot Programming
3
Contents
Requirements and Language Types to Robot Programming Structure and Basic Functions of Robot Language System Commonly-Used Language for Robot Programming