PID高超声速飞行器姿态控制中的应用展望
分数阶PI~λD~μ在高超声速飞行器姿态控制中的应用展望
分数阶PI~λD~μ在高超声速飞行器姿态控制中的应用展望齐乃明;秦昌茂;宋志国
【期刊名称】《航天控制》
【年(卷),期】2010()5
【摘要】高超声速飞行器的发展是一个必然的趋势,但是其具有强耦合、严重非线性、大范围气动环境变化的特点,这对飞行器的姿态控制系统提出了更高的要求。
本文简述了现代控制及智能控制在姿态控制器中的应用,回顾了传统PID及其改进控制技术,针对新的被控对象特点,介绍了分数阶PIλDμ及其发展。
由于分数阶
PIλDμ具有比传统PID更好的鲁棒性和控制性能,展望分数阶PIλDμ控制在高超声速飞行器姿态控制中得到更广泛的应用。
【总页数】6页(P93-98)
【关键词】高超声速飞行器;姿态控制;传统PID;分数阶PIλDμ
【作者】齐乃明;秦昌茂;宋志国
【作者单位】哈尔滨工业大学
【正文语种】中文
【中图分类】V448.2
【相关文献】
1.高超声速飞行器自抗扰分数阶PID控制器设计 [J], 秦昌茂;齐乃明;吕瑞;朱凯
2.应用分数阶控制器的飞行器精细姿态控制研究 [J], 王鑫;孟斌;肖鲁;闫代维
3.特征模型分散式自适应姿态控制在高超声速飞行器中的应用 [J], 王勇
4.高超声速飞行器再入分数阶PIλDμ姿态控制 [J], 秦昌茂;齐乃明
5.高超声速飞行器自适应光滑二阶滑模姿态控制 [J], 管萍;张世先
因版权原因,仅展示原文概要,查看原文内容请购买。
高超声速飞行器设计与全球空域开发
高超声速飞行器设计与全球空域开发高超声速飞行器是一种能够以超过5倍音速飞行的飞行器。
它具有巨大的飞行速度和突破常规飞行器的能力,为人类飞行技术带来了新的突破。
在全球空域开发方面,高超声速飞行器的设计和开发变得越来越重要,对于提高国家综合实力、加强军事防卫能力以及推动科技创新有着重要的意义。
首先,高超声速飞行器设计的核心是飞行器的空气动力学。
与常规飞行器相比,高超声速飞行器面临更加复杂的飞行环境和更高的空气动力学问题。
为了设计出稳定、高效的高超声速飞行器,需要深入研究超声速流动、气动热力学以及高速空气动力学等相关领域的技术。
同时,还需要进行大量的计算模拟和风洞试验,以验证设计方案的可行性和性能参数的准确性。
其次,全球空域开发对于高超声速飞行器的设计和研发有着重要的推动作用。
随着全球化的快速发展,国家之间的经济、政治和军事联系日益紧密。
为了满足国家的安全需求和科技创新的要求,各国都在积极推进高超声速飞行器的研发。
全球空域开发的相关项目和合作,为高超声速飞行器的设计和开发提供了更多的资源和支持。
不仅可以促进技术的进步,还可以加快研发进程,缩短飞行器从试验到实际应用的时间。
同时,全球空域开发还可以促进国际间的交流与合作,打破技术壁垒,实现资源共享和互利共赢。
在高超声速飞行器的设计和全球空域开发过程中,需要关注的一个重要问题是飞行器的材料选择和热防护技术。
高超声速飞行器在飞行过程中会受到极高的空气动力热载荷的影响,导致飞行器表面温度迅速上升。
为了保证飞行器的结构完整性和飞行性能,需要利用高温材料和热防护技术来对飞行器进行保护。
目前,各国在高超声速飞行器材料和热防护技术方面都进行了大量的研究和实验,逐渐取得了一系列重要的突破和成果。
然而,仍然需要进一步发展和完善相关技术,以满足高超声速飞行器设计和全球空域开发的需求。
此外,高超声速飞行器的控制和导航技术也是一个重要的研究方向。
由于高超声速飞行器的高速和高温环境,对其控制和导航系统提出了更高的要求。
高超声速飞行器在航空领域应用及挑战分析
高超声速飞行器在航空领域应用及挑战分析高超声速飞行器是一种飞行速度超过马赫数5的飞行器,具有极高的速度和潜在的军事和民用应用。
在航空领域中,高超声速飞行器被认为是未来的发展方向,但同时也面临着许多挑战。
高超声速飞行器的应用领域非常广泛,包括军事、民用和科学研究。
在军事领域中,高超声速飞行器具有突破防御系统和快速投送武器的潜在能力。
它们能够在短时间内到达目标地点,使敌方无法及时做出反应。
此外,高超声速飞行器还可用于侦察、侦查和打击敌方舰艇、陆地和潜艇等目标。
在民用领域中,高超声速飞行器可以用于快速的旅行和货运,将航空技术推向新的高度。
此外,高超声速飞行器还用于科学研究,帮助我们更好地理解大气层、空气动力学和高速飞行的物理特性。
虽然高超声速飞行器在航空领域有着巨大的潜力,但也面临着许多挑战。
首先,高超声速飞行器的设计和制造是非常复杂和困难的。
由于高速飞行对飞行器结构和材料的要求非常高,需要使用先进的材料和技术来确保飞行器的安全性和可靠性。
其次,高超声速飞行器在飞行过程中会遇到极高的温度和压力,这对飞行器的热防护和结构稳定性提出了很高的要求。
此外,高超声速飞行器还面临着操控和导航的挑战。
由于飞行速度过快,飞行器在变轨和变速时容易出现失控的情况,需要精确的操控和导航系统来确保飞行器的稳定性和安全性。
最后,高超声速飞行器的燃料消耗量也是一个问题。
由于高速飞行消耗的能量非常大,如何提供足够的燃料来支持飞行器的运行是一个挑战。
为了克服以上挑战,航空领域需要加大对高超声速飞行器的研究和开发力度。
首先,需要继续改进和发展高超声速飞行器的材料和结构技术。
研究人员需要寻找更强、更耐高温和高压的材料,以确保飞行器在高速飞行中的可靠性和安全性。
其次,需要进一步研究和开发高超声速操控和导航系统,以提高飞行器的操控能力和安全性。
另外,研究人员还需要寻找更高效的燃料和动力系统,以提供足够的能量和推力来支持飞行器的运行。
除了技术挑战,高超声速飞行器还面临着法律和伦理方面的挑战。
航空航天工程中的PID调节技术精确控制飞行状态
航空航天工程中的PID调节技术精确控制飞行状态在航空航天工程中,PID调节技术被广泛应用于精确控制飞行状态。
PID(Proportional-Integral-Derivative)调节是最常用的控制算法之一,它通过对误差、偏差和变化率的综合考虑,实现对飞行器各项参数的精确调节。
本文将以航空航天工程中的PID调节技术为主题,探讨其原理、应用以及未来发展趋势。
一、PID调节技术原理PID调节技术是基于反馈控制理论的一种控制算法。
它通过对误差进行测量,并根据误差的大小和变化率,计算出合理的控制量,使飞行器的状态与期望值尽可能接近。
PID调节算法主要由以下三个部分组成:1. 比例控制(Proportional Control):比例控制根据当前误差的大小,按比例调节控制量。
当误差较大时,比例控制的作用也较大,反之亦然。
比例控制可以帮助飞行器在短时间内快速接近期望状态。
2. 积分控制(Integral Control):积分控制通过累积误差的面积,来补偿系统的静态误差。
积分控制可以提高飞行器的稳定性和鲁棒性,但过度积分会导致系统超调甚至震荡。
3. 微分控制(Derivative Control):微分控制根据误差的变化率来预测未来状态,并对控制量进行适当调整。
微分控制可以提高系统的响应速度和抑制震荡,但对噪声较敏感。
通过综合利用比例、积分和微分三个环节,PID调节技术可以实现对飞行器状态的精确控制,提高飞行安全性和性能稳定性。
二、PID调节技术应用PID调节技术在航空航天工程中有广泛的应用,涵盖了飞行器姿态控制、导航控制、高度控制、速度控制等多个方面。
1. 姿态控制:飞行器姿态控制是航空航天工程中的基础问题之一。
通过PID调节技术可以实现对飞行器的横滚、俯仰和偏航姿态的精确控制,确保飞行器保持稳定的飞行状态。
2. 导航控制:PID调节技术可以用于实现对飞行器的导航控制,包括航线跟踪、航向角控制等。
通过不断调整控制量,飞行器可以保持在设定的导航路径上,并实现精确的目标定位。
串级PID控制在微型无人机姿态控制中的应用_张静
-271-串级PID控制在微型无人机姿态控制中的应用西南科技大学信息工程学院 张 静 刘 恒 郑采薇【摘要】微型四旋翼无人机是典型的多变量、非线性、强耦合、欠驱动运动系统,传统PID算法在微型四旋翼姿态控制系统中无法满足高精度的控制要求,因此提出使用串级PID控制算法,并在软件上编程实现,通过飞行测试,验证了串级PID控制算法的有效性,为无人机姿态控制提供了一条新思路。
【关键词】微型四旋翼;姿态控制;串级PID控制引言微型四旋翼无人机是一种能够适应多种复杂环境的无人飞行器,相比传统的固定翼飞行器,微型四旋翼无人机结构简单,动作灵活[1-3]。
可在复杂地形环境中或者比较狭小的空间中使用,该飞行器在搜救、航拍和侦察等方面具有广阔的应用前景[4-8]。
本文针对微型四旋翼飞行器研究设计了基于的串级PID控制算法的姿态控制系统,并在软件上编程实现,利用飞行测试验证控制算法和控制系统的有效性和可靠性。
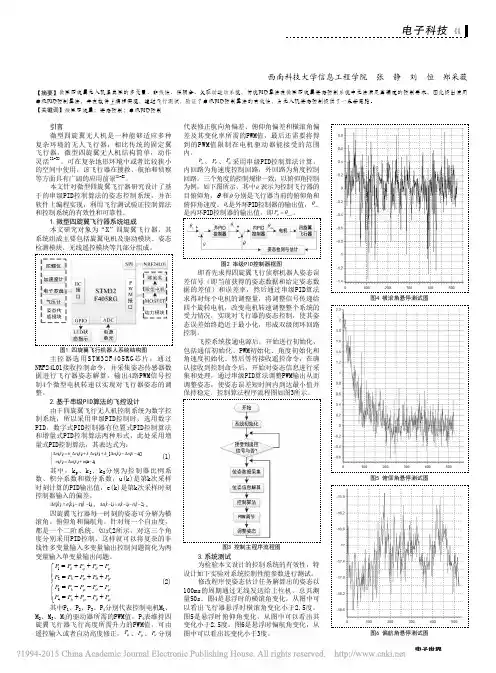
1.微型四旋翼飞行器系统组成本文研究对象为“X”四旋翼飞行器,其系统组成主要包括旋翼电机及驱动模块、姿态检测模块、无线遥控模块等几部分组成。
图1 四旋翼飞行机器人系统结构图主控器选用STM32F405RG芯片,通过NRF24L01接收控制命令,并采集姿态传感器数据进行飞行器姿态解算,输出4路PWM信号控制4个微型电机转速以实现对飞行器姿态的调整。
2.基于串级PID算法的飞控设计由于四旋翼飞行无人机控制系统为数字控制系统,所以采用串级PID控制时,选用数字PID。
数字式PID控制器有位置式PID控制算法和增量式PID控制算法两种形式,此处采用增量式PID控制算法,其表达式为:()()()[()(1)]()()(k 1)P I D u k k e k k e k k e k e k u k u k u ∆=∆+∆+∆-∆-⎧⎨=∆+-⎩ (1)其中,k p 、k I 、k D 分别为控制器比例系数、积分系数和微分系数,u(k)是第k次采样时刻计算的PID输出值,e(k)是第k次采样时刻控制器输入的偏差。
航空航天PID调试技术在飞行控制系统中的应用
航空航天PID调试技术在飞行控制系统中的应用航空航天行业一直在不断追求飞行控制系统的精确性和稳定性。
PID(比例-积分-微分)调试技术是一种常见的控制器调试方法,被广泛应用于飞行控制系统中。
本文将探讨航空航天PID调试技术在飞行控制系统中的应用,并分析其在提高飞行控制精确性和稳定性方面的作用。
一、PID调试技术概述PID控制器是一种基于当前偏差(误差)、积分项和微分项来调整输出的控制设备。
其基本原理是通过对偏差、时间和积分项的综合计算,实现对控制信号的精确调整,以达到期望的控制效果。
PID调试技术被广泛应用于飞行控制系统中,以提高飞行器的控制性能和稳定性。
二、PID调试技术在飞行控制系统中的应用1. 姿态控制PID调试技术在飞行控制系统中的一个主要应用是姿态控制。
通过对飞行器的姿态进行监测和调整,可以使飞行器的飞行方向、姿势和稳定性得到有效控制。
PID控制器可以根据实时的姿态差异和飞行控制系统的特性,对飞行器进行精确的调整,实现稳定和准确的飞行。
2. 航迹控制航迹控制是飞行控制系统中的另一个重要应用领域。
通过对航迹的监控和调整,可以确保飞行器按照预定的路径飞行,避免偏离目标轨迹。
PID调试技术通过对航迹偏差的实时测量和调整,可以使飞行器保持在理想航迹上,并实现高精度的航行控制。
3. 高度和速度控制除了姿态和航迹控制,PID调试技术还广泛应用于飞行控制系统中的高度和速度控制。
通过对飞行器的高度和速度进行监测和调整,可以实现飞行器的垂直和水平稳定性。
PID控制器可以根据实时的高度和速度误差,调整控制信号,确保飞行器保持在预定的高度和速度范围内。
三、航空航天PID调试技术的挑战与解决方案尽管PID调试技术在飞行控制系统中具有广泛应用,但也面临着一些挑战。
其中之一是飞行器的非线性特性,使得PID参数的选择和调整变得更加困难。
另一个挑战是PID参数的准确性和稳定性,需要根据飞行器的动态特性进行合理的选择和调整。
特征模型分散式自适应姿态控制在高超声速飞行器中的应用
( .B in ntueo ot l nier g B in 0 10 C ia 1 e igIstt f nr gnei , e ig10 9 , hn ; j i C oE n j 2 Sinea dT cn l yo pc tlgn ot l aoao B in 0 10,hn ) . cec n ehoo nS aeI ele t nr brty, eig109 C ia g n i C oL r j
c le g n . I e p n e t h t he o iia o ln a y a c r r n f r e no te MI O h r ce itc mo e n t haln i g n rs o s o ta ,t rgn ln n ie r d n mis ae ta som d i t h M c a a t rsi d li he
思 想 , 原 非 线 性 动 力 学 方 程 用 一 个 二 阶 时变 差分 方 程 组 形 式 的特 征 模 型 描 述 , 立 了 攻 角 通 道 独 立 、 航/ 转 把 建 偏 滚
通道耦合 的特征模 型 , 并设计 了分散式 自适应 姿态 控制器 , 出 了稳 定性分 析和数值 仿真 。由于基于特 征模 型设 给 计 的控制器组成 的闭环系统是一个非常复杂 的混合 系统 , 稳定 性分 析在特 征建模理 论 中一 直是一个 难点 , 出的 提
D0 :1 . 8 3 j i n 1 0 —3 8 2 1 . 0 0 8 I 0 3 7 /. s.0 012 .0 2 1 .0 s
Ap ia in fCha a t rsi o e s d c nta ie a i e pl to o c r c e itc M d lBa e De e r lz d Ad ptv Atiud nto n t e H y e s n c Ve il tt e Co r li h p r o i h ce
基于lpv模型的高超声速飞行器鲁棒预测控制方法分析
目 录第一章绪论 (1)1.1研究背景和意义 (1)1.2高超声速飞行器控制方法研究现状 (3)1.3预测控制的研究现状 (11)1.4本章研究内容及结构 (14)第二章预备知识 (15)2.1高超声速飞行器模型 (15)2.2雅可比线性化方法 (16)2.3张量积建模方法 (17)2.3.1张量的基本概念 (17)2.3.2张量的高阶奇异值分解 (19)2.3.3张量积建模的步骤 (21)2.4反馈线性化 (23)2.5线性矩阵不等式 (24)2.6本章小结 (25)第三章基于范数有界技术的高超声速飞行器鲁棒预测控制 (26)3.1引言 (26)3.2高超声速飞行器多胞LPV建模 (27)3.2.1多胞LPV模型的建立 (27)3.2.2模型验证 (30)3.3基于范数有界技术的高超声速飞行器鲁棒预测控制器设计 (32)3.4仿真分析 (38)3.5本章小结 (42)第四章基于控制时域可变的高超声速飞行器鲁棒预测控制 (43)4.1引言 (43)4.2基于控制时域可变的控制策略 (43)4.3变控制时域的鲁棒预测控制器设计 (44)4.4仿真分析 (50)4.5本章小结 (53)第五章基于反馈线性化的高超声速飞行器ISS鲁棒预测控制 (54)5.1引言 (54)5.2参数不确定下的反馈线性化 (55)5.3 ISS鲁棒预测控制器设计 (59)5.3.1误差控制模型 (59)5.3.2控制器设计 (60)5.4仿真验证 (62)5.5本章小结 (69)第六章总结与展望 (70)参考文献 (72)发表论文和参加科研情况说明 (80)致谢 (81)第一章绪论1.1研究背景和意义高超声速飞行器是指一类飞行马赫数大于5且主要飞行区域在20千米到100千米的临近空间的飞行器。
极高的飞行速度和特殊的飞行高度使得高超声速飞行器具有重大意义。
高超声速飞行器因为快速飞行和强突防的能力首先受到军方的青睐。
将其与洲际导弹相比较,高超声速飞行器的机动性更强,飞行弹道不固定,最终落点较难预测,因此对敌方防空系统有极高的突防率,甚至可以在不掌握制空权的条件下,实现超远程打击。
飞行器控制中的制导和姿态控制技术
飞行器控制中的制导和姿态控制技术飞行器作为现代航空运输工具的重要组成部分,其安全性和性能指标的提高,关系到人类文明进步、国家安全以及人民幸福的重大问题。
而制导与姿态控制技术则是飞行器控制系统的两个核心技术,其是否合理、高效、可靠,直接关系到飞行的安全、舒适性、运输效率和经济效益。
一、制导技术制导是指飞行过程中,通过指挥飞行器在所期望的轨道上自动或半自动飞行的一种技术。
制导系统的任务是自动或半自动地进行导航、规划、跟踪飞行轨迹,以及在允许范围内对轨迹误差进行补偿和校正。
常见的制导技术有惯性制导、GPS制导、光电制导及组合制导等。
其中惯性导航是最为常见的一种,其系统通过测量飞行载体加速度与角速度,以及改变速度和方向的环境载荷,计算出自身的飞行状态,进而实现导航与姿态控制。
而GPS制导、光电制导等技术则通过卫星信号和目标识别等手段,对飞行状态进行测量和矫正。
二、姿态控制技术姿态控制技术是指在飞行过程中,保持飞行器的稳定状态和期望的位置、方向和速度等参数,防止受到外界扰动而出现姿态失控、飞行不稳定等情况。
姿态控制系统对飞行器的姿态控制进行监视,并对不稳定的姿态状态进行补偿或控制,以实现飞行器的平稳、稳定地运行。
常见的姿态控制技术有PID反馈控制法、模型预测控制法、自适应控制法等。
PID控制法是一种传统的控制技术,通过对姿态转角误差、偏差和积分项等要素进行测算和控制,从而实现对飞行器姿态的控制。
模型预测控制法则是一种基于预测模型的控制技术,通过对飞行器状态和扰动进行预测,并对姿态进行补偿和控制,逐渐实现从预测精度转向实际精度的实时控制。
自适应控制法则通过对飞行器的复杂、不确定的动态特性进行建模和控制,实现了对飞行器姿态控制的更加高效和准确。
三、制导和姿态控制的结合制导与姿态控制两个技术的结合,协同作战,对飞行器的控制系统进行完美的设计和优化,不但可提高飞行器的性能和安全性,还能更好地适应不同的任务需求和环境变化。
近空间高超声速飞行器运动控制仿真方法
近空间高超声速飞行器运动控制仿真方法1.引言1.1 概述近空间高超声速飞行器是指能在接近地球表面或低高度飞行并达到超声速的飞行器。
近年来,随着科技的发展和空间探索的深入,近空间高超声速飞行器的研究成为了航空领域的热点之一。
这种飞行器具有很高的飞行速度和机动性,具备广泛的应用前景,包括军事侦察、气象观测、地球探测等领域。
然而,近空间高超声速飞行器的运动控制是一个相对复杂的问题。
由于其高速飞行和复杂的飞行环境,需要使用先进的控制方法来确保飞行器的稳定性和安全性。
因此,针对近空间高超声速飞行器运动控制的仿真方法的研究变得十分重要。
本文将介绍近空间高超声速飞行器运动控制仿真方法的研究进展。
首先,我们将概述该研究的背景和意义,并介绍本文的结构安排。
然后,我们将详细介绍两种不同的运动控制方法,并通过仿真实验来验证其有效性。
最后,对本文的研究进行总结,并展望未来的研究方向。
通过对近空间高超声速飞行器运动控制仿真方法的研究,我们可以深入理解飞行器在不同空间环境下的动力学行为,为飞行器的设计和控制提供参考。
同时,通过仿真实验,我们可以评估不同控制方法在不同工况下的性能,为工程实践提供指导。
本文的研究成果具有理论和应用的双重意义,对于推动近空间高超声速飞行器的发展具有重要的促进作用。
在接下来的章节中,我们将详细介绍近空间高超声速飞行器运动控制方法一和方法二的要点。
同时,我们将详细描述仿真实验的方法和结果,并进行相应的数据分析和讨论。
最后,在结论部分,我们将对本文的研究结果进行总结,并对未来的研究方向进行展望。
通过本文的研究,我们希望能为近空间高超声速飞行器的运动控制提供新的思路和方法,并为该领域的发展做出重要的贡献。
1.2文章结构1.2 文章结构本文主要介绍近空间高超声速飞行器的运动控制仿真方法。
整篇文章分为三个部分进行展开。
具体的章节安排如下:2. 正文部分2.1 近空间高超声速飞行器运动控制方法一2.1.1 要点1在这一部分,将会详细介绍近空间高超声速飞行器运动控制的第一个方法,包括其原理、实现过程、控制策略等相关内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Oct.2010航天控制
v。
1.28,N。
.5AerospaceContr。
1。
93・分数阶肼A∥在高超声速飞行器
姿态控制中的应用展望
齐乃明秦昌茂宋志国
哈尔滨工业大学,哈尔滨150001
摘要高超声速飞行器的发展是一个必然的趋势,但是其具有强耦合、严重非
线性、大范围气动环境变化的特点,这对飞行器的姿态控制系统提出了更高的要
求。
本文简述了现代控制及智能控制在姿态控制器中的应用,回顾了传统PID
及其改进控制技术,针对新的被控对象特点,介绍了分数阶P,1矿及其发展。
由
于分数阶PPIY"具有比传统PID更好的鲁棒性和控制性能,展望分数阶川1矿
控制在高超声速飞行器姿态控制中得到更广泛的应用。
关键词高超声速飞行器;姿态控制;传统PID;分数阶P,1矿
中图分类号:V448.2文献标识码:A
文章编号:1006.3242(2010)05-0093-06
ProspectofFractional-OrderPIADpController
forHypersonicMissileAttitudeControl
QINaimingQINChangmaoSONGZhiguo
HarbinInstituteofTechnology,Harbin150001,China
AbstractThe
developmentofhypersonicmissileisaninevitabletrend.Therequirementofattitudecontrols弘temforaerocrafiishigherbecausethecharacteristicsofastrongcoupling,seriousnonlinearandlarge—scaleenvironmentalparametersarechangedinaerodynamic.Inthispaper,themoderncontrolandintelli—gent
controlthatappliedtoattitudecontrolarebriefed,andclassicalPIDcontroltechnologyanditsim—provementarereviewed.thefractionalorderPI、D“controlleranddevelopmentforfknell3objectfeaturesarealsointroduced.Asaresult,fractionalorderPI、D“controlisbetterthanclassicalPIDcontrolinrobustnessandcontrolperformance.Therefore,fkfractionalorderP11D“controlwillbe埘池矽usedinhypersonicmissileattitudecontr01.
KeywordsHypersonicmissile;Attitudecontrol;ClassicalPIDcontrol;FractionalorderP11D9controller
高超声速飞行器以美国的超一x计划飞行器及通用航空飞行器(CAV)[13为代表,计划实施对全球的快速打击,俄罗斯、日本等国也在积极研制高超声速飞行器,而我国尚处于起步阶段。
高超声速飞行器的飞行速度和高度变化大,可全空域机动飞行但其大范围气动环境的变化引起系统参数变化范围大,各通道间耦合影响也变大,使其成为具有强耦合、严重非线性并带有不确
收稿日期:2009-07-26
作者简介:齐乃明(1962一),男,哈尔滨人,教授,博士生导师,主要研究方向为航天器飞行动力学控制与仿真;秦昌茂(1985一),男,江西人,博士,主要研究方向为高超声速飞行器制导与控制;宋志国(1987一),男,黑龙江人,硕士,
主要研究方向为高超声速飞行器制导与控制。