高超声速飞行器的关键技术
临近空间高超声速滑翔飞行器拦截策略分析
临近空间高超声速滑翔飞行器拦截策略分析摘要:临近高超声速滑翔飞行器的防御策略一直是空间攻防对抗技术领域的一个难点,尤其是近年来发展的临近空间高超声滑翔飞行器更给现有的防御体系带来了新的挑战。
本文针对临近空间高超声速滑翔飞行器的拦截难点,展开了对临近空间高超声速滑翔飞行器的拦截策略展开分析,得到滑翔段是最佳的拦截策略,但为了提升拦截成功率,应该采用多阶段的多次拦截策略。
关键字:临近空间、高超声速滑翔飞行器、拦截策略0引言临近空间是指高度为20~100 km高度范围内的空域,介于航空器空间与卫星轨道空间之间的空域,高于绝大多数地面防空武器的作战高度,却低于大部分轨道拦截器的作战高度,具有极大的军事应用价值,随着科学技术的快速发展、空间攻防对抗的日趋激烈,临近空间高超声速滑翔飞行器的拦截已成为国家空间战略安全的关键技术需求。
1临近空间高超声速滑翔飞行器拦截难点随着临近空间高超滑翔飞行器的技术的不断发展,临近空间飞行器存在着突防弹道低、飞行轨迹诡异多变,导致高超声速滑翔飞行器存在着一下拦截难点。
(1)预测系统探测跟踪难高超声速滑翔飞行器的雷达反射面积较小,外形设计具有一定的隐身特性,再配合隐形材料的使用,导致飞行器的观测性低。
而现有的拦截系统的探测设备,包括地基雷达,空中预警机和天基低轨卫星,在探测上存在相当大的盲区,导致对于临近空间滑翔飞行器的稳定跟踪难。
(2)拦截武器追踪命中难对于拦截武器而言,一方面,高超声速武器有着远超弹道导弹的机动性,拦截弹在拦截过程中需要更大的过载承受力与机动力,不仅对弹体结构强度与机动能力有着更高的要求,而且拦截弹所需的能量也远超以往。
另一方面,来袭导弹的高机动型也考验着拦截弹的制导精度,之前的纯动能拦截方案可能由于打击精度问题无法保证有效命中,在后面的拦截中为确保可靠将会需要采用动能拦截与非动能拦截两种路线,动能杀伤弹头与破片杀伤弹头两种手段结合的方式。
(3)拦截体系构建难高超声速武器的飞行轨迹则几乎无法预测,如何部署拦截任务、分配拦截力量是目前急需解决的技术难题,倘若来袭的高超声速武器在现有突防手段上再辅以人工智能技术对拦截策略预先分析,提前规避拦截,则拦截难度将会进一步增大。
高超声速飞行器制导控制一体化设计方法
高超声速飞行器制导控制一体化设计方法高超声速飞行器是指飞行速度超过马赫5的飞行器,这种飞行器有很高的飞行速度和高超声速区独特的飞行特性,非常具有挑战性。
由于高超声速飞行器的复杂性,其制导控制技术设计也非常复杂。
为解决高超声速飞行器制导控制的问题,需要采用一体化设计方法。
一、高超声速飞行器的特点高超声速飞行器飞行速度非常快,超过了马赫5的速度,虽然飞行高度相对较低,但飞行环境非常恶劣,从海平面到大气层的高度不到100公里,大气密度非常稀薄。
这些特点给高超声速飞行器的设计和制导控制带来了很大的挑战,需要开发出专门的技术来进行处理。
二、高超声速飞行器制导控制挑战高超声速飞行器制导控制技术的首要挑战就是考虑飞行器的动力学特性,因为飞行器在高超声速飞行过程中会遇到很强的气动力和热力效应。
这些效应会导致飞行器的运动状态出现不稳定的情况,因此需要开发出稳定的动力学模型,并采用先进的控制算法来进行设计。
另外,高超声速飞行器的速度非常快,导致实时控制信号的处理时间非常短,只有毫秒级别的时间。
因此,需要采用超快速的数据处理技术,以确保对飞行器的控制的及时性和准确性。
同时,还需要考虑飞行器的机动性能,因为高超声速飞行器可能遇到不同的飞行条件,需要能够处理这些飞行条件下的制导控制问题。
三、高超声速飞行器制导控制一体化设计方法为了解决高超声速飞行器制导控制问题的挑战,需要采用一种一体化的设计方法,包括动力学建模、控制策略设计和控制仿真等步骤。
1、动力学建模动力学建模是一体化设计中的重要步骤,需要用数学模型表示飞行器的动力学特性,以便进行控制策略设计和仿真。
对于高超声速飞行器的动力学建模,需要考虑到飞行器在高超声速情况下的不稳定性和非线性特性以及贡献等因素。
2、控制策略设计控制策略设计是高超声速飞行器制导控制的核心问题,主要是根据动力学模型设计出合适的控制算法。
一般包括模型参考控制(MRC)以及线性二次型控制(LQC)等算法。
双燃烧室冲压发动机为动力的高超声速飞行器
双 燃烧室冲压发动机为动 力的高超 声速 飞行器
于江 飞 ,晏 至辉 ,刘卫 东
( 国防科学技术大学,长沙 ,4 0 7 ) 10 3
摘要 :介绍 了双燃烧室冲压发 动机 的研 究进展及特点 ,并较详细地论述 了以双燃烧室冲压发动机 为动力的高超声速 飞行 器的主要 技术,对其机理研究和工程应 用有一定 的参考价值 。 关键词:冲压发动机;双燃烧室;高超声速飞行器
速巡航 导 弹计划 l。该 计划 由 J / P 1 J HU A L领 导 ,为期 4 年 , 目的是通 过 飞行 试验 验证 以碳 氢 燃料 双燃 烧 室冲
个新 的 高潮 。为 适应 高超 声速 飞行 器不 同马赫数 下
的工作 要求 ,同时保 证 碳氢 燃料 在一 定 的超 声 速范 围
( t n l ies yo ee c e h oo y h n sa 1 0 3 Na o a Unv r t f fn e c n lg ,C a g h ,4 0 7 ) i i D T
Abta t D v lp n n h rc r t so ul o utr a jt D R aei rd cd S m c nq e a al fr s c: e e met dc aat sc f a— mb s m e ( C ) t ue . o et h iu svl be o r o a e i i d c or r no e u me s d f ca i n n ier gapi t n f y esnc eilwi ul o b s ra jt e i usdi dti t yo hns ade g e n l ai pro iv hc t d ac m ut m e s se eal u me m n i p c o oh e h or r a dc n . Ke od : a jt D a cmb s r H p r nc e ce yW rs R m e ; u l o ut ; y es i vh l — o o i
高超声速动力能热管理技术综述
第 50 卷第 2 期2024 年 4 月Vol. 50 No. 2Apr. 2024航空发动机Aeroengine高超声速动力能热管理技术综述梁义强,范宇,周建军,刘太秋(中国航发沈阳发动机研究所,沈阳 110015)摘要:高超声速飞行器因良好的高速突防和快速打击能力成为重要的装备发展方向,但高超声速飞行工况的特殊性使其动力系统对热管理和能源供给提出了严苛的需求。
通过分析文献对高超声速动力的热防护、燃油热管理和进气预冷等技术进行了详细评述。
热管理对高超声速动力装置的功能和性能实现具有重要影响,但其目前在该领域研究技术的成熟度较低,飞发一体化是解决问题的重要技术途径之一。
通过文献综述对能源供给的生成及利用等技术与传统飞行器进行了对比,概述了现有高超声速动力主要的能源供给方式的关键技术为燃油裂解气涡轮等,在此基础上总结了能热(能源与热)管理的未来发展趋势为热电转换等,为高超声速动力能量综合能热管理技术的发展提供借鉴。
关键词:高超声速动力;能热管理;推进系统;发电技术中图分类号:V231.1文献标识码:A doi:10.13477/ki.aeroengine.2024.02.002Overview of Power and Thermal Management Technology for Hypersonic EngineLIANG Yi-qiang, FAN Yu, ZHOU Jian-jun, LIU Tai-qiu(AECC Shenyang Engine Research Institute,Shenyang 110015,China)Abstract:Hypersonic aircraft represents a crucial focus in equipment development, owing to their exceptional high-speed penetra⁃tion and swift strike capabilities. However, stringent requirements for thermal management and power supply are imposed by hypersonic flight conditions. A comprehensive review of technologies concerning thermal protection, fuel thermal management and inlet air precooling is conducted. Thermal management significantly impacts the performance and function of hypersonic engines, but its current technical maturity level in this field is relatively low. The integration of airframe and engine is identified as one of the important approaches for addressing these challenges. A literature review was conducted to compare the generation and utilization technologies of power supply with traditional aircraft. Key technologies of primary power supply methods in existing hypersonic engines are outlined, including the fuel vapor turbine. The future developmental trends in power and thermal management are summarized, such as thermoelectric conversion, providing a reference for the development of integrated power and thermal management technologies for hypersonic engines.Key words:hypersonic engine; power and thermal management; propulsion system; power generation technology0 引言未来战争要求战机在极具复杂的空天战场态势下“快速响应、远程打击”、“先敌发现、先发制敌”,形成对敌全面压制的战略优势[1-2]。
高超声速飞行器发展综述及飞行试验测控需求
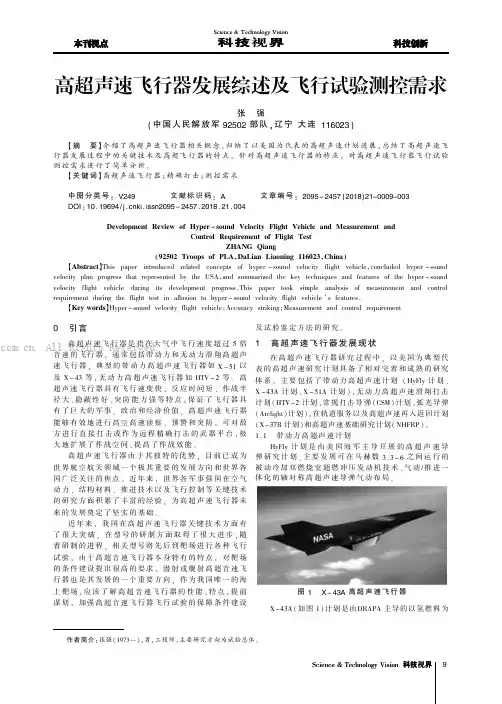
体化的轴对称高超声速导弹气动布局。
图1X-43A高超声速飞行器X-43A(如图1)计划是由DRAPA主导的以氢燃料为。
Science&Technology Vision科技视界9将提供一种全新的快速全球打击能力。
图2X-51A高超声速飞行器1.2无动力高超声速计划无动力高超声速计划通常采用助推器将高超声速无动力滑翔飞行器助推到预定的分离点,无动力滑翔飞行器通过长时间的高超声速滑翔飞行实现快速的投送和打击。
. All Rights Reserved.HTV-2(Falcon)计划是由DRAPA主导用来验证全球快速打击武器的关键技术,驻澳包括远程高超声速助推滑翔飞行器气动布局技术、热防护技术、先进GPS制导技术和碳/碳减速伞技术等。
HTV-2计划的目标是通然要求;图3高超音速飞行器典型弹道(3)精确打击能力,对点目标、机动目标的直接命中打击能力,对目标"点穴式"小附带损伤打击能力,是现代战争和未来信息化战争的基本要求,是精确打击和常规威慑的技术保证;(4)有效突防能力:导弹速度越高,其突防能力越强;关于飞行高度,其突防能力与拦截武器类型有关,对于靠气动力控制的拦截弹而言,其拦截能力随导弹飞行高度增高而下降,对于靠直接力控制的拦截弹而言,其拦截能力随导弹飞行高度增高而增强(5)高作战效能,具备包括高射前生存能力、有效Science &Technology Vision科技视界(上接第11页)基、海基或空基)需根据航区特点合理布置。
弹上测量参数种类、数量非常多,主要包括热流参数、压力参数、温度参数、过载参数、缓变电压模拟量、开关量等,数据的数据量非常大,因此遥测需满足大容量数据传输要求。
靶场地面站应能满足相关的保密保密要求。
(2)外测需求对导弹飞行试验全程进行外弹道测量,测量导弹位置参数及运动参数,如高度、距离、侧偏、速度、加速度等。
并能够按要求实时传送到指挥控制中心,用于监测和安控判决。
高超声速飞行器乘波体构型及其设计
高超声速飞行器乘波体构型及其设计摘要:高超声速飞行器由于具有高空高速、巡航距离远以及突防能力强的特点而备受追捧,而乘波体构型正能满足这些要求。
在欧拉方程的基础上,国际上提出了多种基于楔形流动和锥形流动的乘波体构造方法。
此外,也提出了考虑如粘性效应等其他因素的优化方法。
这些方法都将乘波体飞行器不断向工程应用推进。
关键词:乘波体附体激波自由流线追踪流线1 引言高超声速飞行器由于具有速度快、高度高、巡航距离远以及突防能力强的特点,近年来逐渐受到追捧。
而相应的,为实现以上特点,对于其机体必须采用一种高升阻比和强机动性的气动外形。
目前比较适合的气动外形有旋成体、翼身融合体、升力体和乘波体等[1]。
旋成体在Ma<1时升阻比较高,结构简单,但高马赫数飞行时机动性较差,比较适用于各种型号的导弹;翼身融合体机身机翼相融合,亦在Ma<1时升阻比较高,气动阻力小,内部容积大,但外形复杂,适用于超声速战斗机、战略轰炸机等;升力体没有机翼结构,Ma>1时升阻比都比较高,大迎角下和高超声速时有较好气动特性,内部体积利用率高,但外形复杂,比较适用于航天飞机和空天飞机等[2]。
而乘波体则是指一种外形是流线型,其所有的前缘都具有浮体激波的超声速或高超声速的飞行器。
它的设计与常规的由外形决定流场再去求解的方法相反,而是先有流场,然后再推导出外形[3]。
乘波体构型在高马赫数下具有更高升阻比,特别是对于Ma>5的高超声速飞行器。
它具有以下四个显著的优点:(1)乘波体外形的最大优点是低阻、高升力、高升阻比,其上表面没有流场干扰,没有流线偏转,激波限制在外形的前缘,使得在可压区中下表面上的高压同向上倾斜的外形一起组合,获得整个外形上的推力分量。
(2)乘波体外形在偏离设计条件下,仍能保持有利的气动性能。
(3)乘波体外形更适合使用喷气发动机或冲压发动机。
(4)乘波体外形因为是用已知的可以得到精确解的流场设计而成,所以更易于进行优化设计以寻求最优构型。
临近空间高超声速飞行器跟踪技术
Tr c c o o y o y r o i r r f n Ne r S c a k Te hn l g f H pe s n c Ai c a t i a pa e
GUAN X n,Z i HA0 Jn ig,HE Yo u
(ntueo fr ai ui eh o g , ayA i i nier gA ae y Y n i 60 1 C ia Istt fnom t nF s nT cn l y N v vao E g ei cdm , at 40 , h ) i I o o o tn n n a2 n
第3 2卷
第 8期
四 川 兵 工 学 报
21 0 1年 8月
【 武器装备】
临近 空 间高超 声 速 飞行 器 跟 踪 技 术
关 欣, 赵 静, 何 友
24 0 ) 6 0 1 ( 军 航 空 工 程 学 院 信 息 融合 技 术 研 究 所 , 东 烟 台 海 山
摘要 : 介绍 了临近空 间及 临近空 间飞行器 的特点 , 分析 了临近空 间高超声 速飞行器 的运动特性 , 出 了关 于临近空 提
临 近 空 间 飞 行 器 是 指 工 作 于 临 近 空 间 并 利 用 临 近 空
间独有 资源和特点来 执行一 定任 务的一类 飞行器 。临近空
间飞行器的划分方法有很 多种 , 这里按照 飞行 的速度可 以分 为高速和低速临近 空间飞行 器。低 马赫数 的飞行器 主要用 于情报收集 、 侦察监视 、 信保障 , 通 如升力式 、 浮力 式 、 浮一 升
的平 均功率在数千瓦 的量级 。根据 微波 电真空器件 的水平 , 雷达发射 机的功率至少还可 以提 高一个数量 级 , 国外对情报 雷达 的功率 已达数 十 千瓦 。二是 增 大天 线有 效 孔 径 面积 。 从理论角度考 虑 , 增大 天线 孔径 , 波束变 窄 , 而增加搜索 则 进
航空航天行业的超音速飞行技术资料
航空航天行业的超音速飞行技术资料超音速飞行技术是航空航天行业中一个重要的研究领域,它代表着新时代的航空高速发展。
本文将介绍超音速飞行的定义、应用、挑战以及最新进展。
一、超音速飞行的定义超音速飞行是指飞行器在大气层中达到或超过音速的速度,即飞行速度超过每小时约1225公里。
超音速飞行的特点是具有更快的速度和更强的机动性,同时也带来了一系列的挑战。
二、超音速飞行的应用超音速飞行技术在军事、民用航空领域有着广泛的应用。
在军事领域,超音速飞行器可以快速实施战术打击任务,提高作战效能;在民用航空领域,超音速客机可以缩短长途航行时间,提高旅行效率。
三、超音速飞行的挑战超音速飞行技术面临着许多挑战和限制。
首先,超音速飞行器在超音速飞行时会产生巨大的空气动力学压力和阻力,需要采取特殊的造型和材料。
其次,超音速飞行器的发动机需要具备强大的推力和高温耐受能力。
此外,航空航天领域的超音速飞行技术还面临着噪音、排放和安全等方面的问题。
四、超音速飞行技术的最新进展为了克服超音速飞行技术的挑战,航空航天行业一直在积极探索和研究。
目前,一些国家和企业已经取得了许多突破性成果。
例如,美国的“后嗡嗡”计划旨在开发下一代超音速客机,以提供快速、高效的旅行方式。
此外,研究人员还在材料科学、空气动力学和航空发动机等方面进行了深入研究,推动了超音速飞行技术的发展。
总结超音速飞行技术是航空航天行业中一个具有重要意义的领域。
它不仅在军事领域具有重要作用,同时也为民用航空领域提供了新的发展机遇。
虽然超音速飞行技术面临着各种挑战,但随着技术的不断突破和进步,相信未来超音速飞行将能真正实现商业化,并为人们带来更快、更高效的航空体验。
超高声速飞行器
超高声速飞行器摘要:高超声速飞行器一般是指飞行速度超过5倍音速的飞机、导弹、炮弹之类的有翼或无翼飞行器,具有较高的突防成功率和侦查效能,能大大扩展战场空间。
高超声速飞行器潜在的巨大军事和经济价值使得当前世界各军事大国纷纷投巨资到该领域,成为21世纪世界航空航天事业发展的一个主要方向。
近年来,各军事大国在推进技术、结构材料、空气动力和飞行控制等关键技术研究方面积累了丰富经验,对高超声速飞行器未来的发展奠定了基础。
关键字:超高声速、飞行器、推进技术。
一、飞行器的发展历程人类向往飞行的理想几乎伴随这整个人类的历史。
最初,人们受到鸟类的启发而使用人造翅膀,但是发现这并不现实。
人类的身体对于人造翅膀而言过于的沉重。
并且在探索的早期人类并不了解鸟类飞行的空气动力学原理。
经过一系列的探索,到了18世纪后期,人类发明了热气球。
1783年热气球首次载人升空。
随后出现了飞艇。
相比于热气球,带有推进装置、载重更大的飞艇更具实用性。
飞艇的出现并未宣告飞行器的发展并未就此停歇。
人类还是研制机动性更好的飞行器。
1903年,由莱特兄弟制造的人类第一架飞机——飞行者1号,并成功升空。
莱特兄弟总共制造了三架“飞行者”号飞机。
“飞行者”三号是其中最成功的一架,其飞行成绩为38分钟飞行38.6km。
“飞行者”三号飞机的成功宣布飞机终于具有了实用性。
至此人类迎来的飞机时代。
自飞行者之后活塞式螺旋桨飞机得到了极大的发展,飞行时速不断地提高。
但是螺旋桨式飞机存在着速度上限。
当螺旋桨尖端线速度接近声速时,空气会被极具压缩,而这部分压缩空气来不及散开,在桨端形成一个巨大的阻力,称为激波阻力。
此时桨端的空气将粘滞在桨叶表面,使螺旋桨的效率降低。
这便是螺旋桨飞机不能飞得更快的原因。
为了克服螺旋桨飞机的这一速度上限,人们研制了喷气发动机。
喷气发动机构造不同于活塞式螺旋桨,因此飞机可以飞得更快。
随着发动机性能的提升以及飞行器气动外形的升级,飞机的速度已经能达到2马赫。
临近空间高超声速武器防御及关键技术研究
武器 的攻和 防是 对 立 的 概念 , 有 同等 重 要 具 的作 用 。现 有 的导 弹 防御 系统 , 美 国 的导 弹 防 如 御 系统( si ee s y tm, mis ed fn es se MD) 专 门针对 l 是 弹道导 弹而设计 的 , 预 警 和制 导 系统 都 是 根据 其
21 0 学 报
J u n l fteAcd myo up n mma d & Teh oo y o r a o h a e fEq ime tCo n c n lg
J n 2 1 ue 00
Vo1 1 N o 3 .2 .
a d is ke e h l gy a e dic s d n t y t c no o r s us e .
Ke o d y w r s:ne r s a e d f ns ys e ;hi h s e e i l a —p c ; ee es tm g — pe d v h c e
分 , 了应对临近 空 间高超声速 目标 的威 胁 , 为 必须 发 展和 建 立新 型 的武 器 防御 系统 。
分析 了临近 空 间防御 系统 的 目标 特性 , 究 了临近 空 间超 高速 飞行器 的防御难 点 , 研 提
出 了临近 空 间防御 武器设 想 以及 实现途 径 和 关键 技术 , 发展 临近 空 间超高 速 武器 对
弹 道 预 测 而 工 作 的 , 于 高 速 的 临 近 空 间 目标 , 对 虽
ln es se THAAD) 拦 截 高 度 下 限 为 4 e s ytm, 的 O
k m。这些 因素使 得 现有 的 防御 体 系 面 临 着 严 峻
的挑 战 , 了应 对 临近空 间超高速 目标 的威胁 , 为 必
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高超声速飞行器的关键技术 以超燃冲压发动机为动力的高超声速飞行器研制面临一系列技术上的难题. 美国(包括俄罗斯等国家) 为此付出了近半个世纪的艰苦努力, 制定了多个不断变化的发展计划, 几经起伏, 最终探索出一条比较实际的、循序发展的道路. 发展高科技工程必须要有基础研究的积累, 在关键技术问题上取得突破, 否则, 可能导致失败的后果. 当前应当抓紧进行的主要研究和关键技术攻关工作包括: (1) 高温气体动力学 高温真实气体效应是高超声速飞行器研制中必须考虑的一个重要问题. 对于高温气体非平衡流动问题, 已进行了大量的研究. 对高温气流中化学反应速率的知识不足, 特别是在振动自由度激发、分子离解、表面化学反应等各种因素耦合在一起的情况下, 更是知之甚少. 目前存在的主要问题是: 高温气体热力学特性和化学反应速率常数以及化学反应模型的选取, 还有一定的不确定性,这将导致头部激波脱体距离、物面边界层速度剖面、密度剖面和物面热流等重要参数预示上的偏差. 美国人在总结 X-43A 经验时曾提出要重点研究高超声速对下列问题的影响: 边界层从层流转变为湍流的转捩问题, 湍流边界层的流动和剪切层的流动, 激波与边界层之间的相互作用, 燃料喷注入气流、燃料与空气的混合、燃料与空气之间的化学反应, 机身与推进系统一体化设计的飞行器性能和可运行范围. 对于上述这些问题的研究, 都应当充分利用和发挥现代光学诊断技术和高速数值计算技术所具有的优势. 地面模拟试验设施. 目前在美国仅仅存在为数不多的几个可用于高超音速飞行研究的高焓试验设施, 而且这些设施在试验范围上还都受到种种限制. 各类脉冲型风洞的最高焓值范围可以高达对应马赫数20 的飞行速度, 但都是短持续时间(1»10 ms) 的试验设施. 试验时间可以相对较长的一些设施, 都是污浊(不清洁) 空气的风洞, 在这些风洞的自由气流内含有燃烧产物, 而且它们的最高焓值范围仅限于对应马赫数8 以下的飞行速度. 与高焓值状态相伴随出现的一些新的流动变量, 例如分子振动自由度的激发、各种分子和离子的浓度等, 都可以用现代光学诊断技术进行测量,但目前这些技术仅仅在极有限的情况下, 在高焓值的地面试验设施上得到应用. 能够提供更长试验时间(即从几毫秒提高到几秒量级) 的高焓地面试验设施和能够提供更高诊断能力的地面试验设施都是必不可少的. 为了能够满足高超音速飞行系统研制开发所提出的要求, 可能还需要建设新的地面试验设施.
(2) 超燃基础和新概念推进研究 在能够促使吸气式高超音速飞行实现的各种关键技术中, 推进技术占据首要的位置. 对于超燃冲压发动机的研制来说, 存在着许多具有挑战性的技术难题, 包括: 在整个宽广的运行速度范围内(特别是在马赫数超过8 的情况下) 超燃冲压发动机内部流动, 燃烧稳定性与过程优化, 地面试验和精细流场诊断、飞行试验以及数字模拟技术;质量轻、耐高温的发动机材料和有效的热管理技术; 研究新的发动机技术, 以及验证飞行速度大于马赫数8 情况下的发动机性能; 研究发动机/飞行器一体化设计方法(包括进气道/发动机/ 尾喷管组合; 综合气动力与防热一体化; 高升阻比与操稳特性的协调; 气动特性与结构完整性设计; 气动外形与有效载荷容积要求; 多学科多目标(multidis-ciplinary design optimization, MDO) 总体优化等. ),实现可实际运行的、具有高性能的一体化设计的飞行器方案; 如何从低速推进模式转变成高速推进模式的问题, 特别是在采用可变几何形状的发动机的情况下, 如何实现工况转换的问题. 1991 年»1998 年间, 俄罗斯分别与法国, 美国,德国等合作进行了超燃冲压发动机的验证性飞行实验. 提出了一系列关键问题. 从美俄的经验教训来看, 这些基础性的问题不解决, 超燃发动机的研制是不会取得成功的, 因此在这方面还需下很大功夫. 各种组合式和新概念动力装置研究. 现有的动力装置, 不论是火箭或超燃冲压发动机, 对于在40»70km 高度, 持续、机动飞行的高超声速飞行器都是不理想的. 要积极探索各种组合式和新型动力装置(如: 脉冲爆轰驱动、激光/等离子推进、核动力推进等) 研究其作用原和实用化问题在这方面如能取得突破, 将为未来自主创新和跨越发展争取到主动.
(3) 新型防热、隔热原理、材料与结构 现有飞行器热防护系统大都是针对战略弹头的, 特点是: 简单外形、短时间、很高的加热率.采用的主要办法是烧蚀热防护.新一代空天飞行器热防护问题具有不同的特点: 复杂的升力体外形、中低热流和长时间加热. 为了获得良好的气 动特性, 一般需采用保持飞行器外形不变的非烧蚀热防护技术, 还要解决长时间持续飞行的内部隔热问题. 已经建立的宏观热防护理论已不能满足要求, 要发展新的热流预示方法; 非烧蚀热防护技术; 防热结构的一体化设计技术; 结构在力/热 综合作用下的动态响应特性和破坏机制等. 各种防热、隔热原理, 包括: 被动式(热沉、隔热、表面辐射)、半被动式(热管传导+ 辐射) 和主动式(发汗、冷却膜、冷气流对流), 都是值得深入探讨的问题. 在发动机防热材料技术方面焦点集中在: 采用主动式冷却方式的燃烧室壁板材料, 以及超低温推进剂贮箱的材料. 需要更加坚固耐用的被动式冷却的或者主动式冷却的(即需要使用冷却剂进行冷却的) 热防护系统; 燃烧室部分必须采用主动式冷却方式. 虽然到目前为止已经对许多种不同的熱防护系统的候选设计方案进行了广泛的试验研究, 但是还没有找到一个可以完全满足多种运行要求的解决办法.
(4) 变参数、快速响应、强鲁棒性、高效控制系统设计 近空间飞行器为了追求高的升阻比和优异的机动性能, 一般外形都比较复杂, 飞行过程中速度和空域变化范围也很大. 飞行器在不同速度下, 自身的气动特性(升阻比、稳定性和操纵性) 也会发生很大变化, 这就为飞行控制增加了新的困难. 高机动性要求快速响应的控制系统和大的控制力作用, 以产生大过载. 近空间飞行器控制问题研究的重点是, 面对飞行器所具有的多变量、时变参数、强鲁棒性、高度非线性、纵横向交叉耦合、气动弹性效应显著等挑战性难题, 研究系统的动力学建模、控制律设计及稳定性分析方法, 尤其是长时间巡航飞行, 严酷力、热载荷环境下的伺服机构的设计问题以及高机动状态下的精确控制问题等. 高空大气密度稀薄, 气动舵面的控制效率显著下降, 已不能满足要求, 因此要借助于喷流反作用控制(reaction jet control system, RCS) 和推力矢量控制(美国的X-31 验证机、F-22 和俄罗斯的Su-37 上都采用了这一先进技术). 多个喷流反作用控制单元与气动操纵面以及推力矢量(甚至包括调整质心位置等其他方法) 相结合形成的复合控制系统, 成为对近空间飞行器实施有效控制的重要手段. 俄罗斯首次在R-73 先进红外格斗近距空空导弹上应用推力矢量与气动力综合的复合控制技术.在尾喷口四周加装4 片偏转舵面实现推力矢量控制, 并与空气动力控制相结合, 使导弹的控制通道由传统的双通道控制变为5 通道控制, 即2 个喷流偏转舵控制通道、2 个空气动力舵面控制通道和1个副翼控制通道, 从而使导弹在主动段上的最大机动过载达到60g. 证明了这种方法的有效性. 复合控制系统涉及大量的关键技术问题, 如:复合控制系统工作模式优化设计与仿真建模, 控制发动机点火逻辑与控制周期的设计, 侧向喷流直接力作用和喷流与主流场的气动干扰效应建模与分析计算, 控制系统工作频率与舵系统带宽与 弹性弹体频率的匹配, 复合控制系统的风洞与地面模拟试验等.
(5) 高超声速飞行器的空气弹性问题 现代高超声速飞行器有着比较宽阔的飞行包线, 飞行高度和Ma 数的变化范围很大, 为了增加机动航程, 多采取复杂的高升阻比构形. 由于对结构重量有着严格的限制, 因此大量使用超轻质、高强韧材料, 使机/弹体柔性程度加大. 高速飞行时气动加热现象非常突出, 控制系统的作用也日益重要, 这些因素所造成的高超声速空气弹性问题与传统的亚、跨、超声速相比, 不管是在研究、试验或理论计算分析方法上都有很大不同. \空气/伺服/热弹性" 耦合因素变得非常显著, 高超声速空气弹性成为不可忽略的重要研究课题, 相关技术尚未成熟. 根据国内外工程实践经验, 需要开展研究的高超声速空气弹性问题主要有: (1) 壁板颤振, (2)高超声速翼面/舵面气动弹性特性, (3) 热气动弹性现象, (4) 全机颤振, (5) 弹性- 推进系统耦合现象(6) 弹性- 飞行控制耦合问题, (7) 自由分子流气动弹性特性等. 具体研究内容包括: 高速飞行气动加热, 热响应、热变形、热模态、热气动弹性的分析预测, 运动和弹性振动引发的气动非阻尼效应; 快速变化飞行环境的气动弹性系统建模和动力学特性分析; 复杂升力体外型的抖振与随机激励响应; 气动伺服弹性系统建模、分析、综合和系统优化问题等.
(6) 多学科设计优化 高超音速飞行器必将是由几个高度一体化设计的系统组成的, 需要进行多学科设计优化处理,以便获得能够满足所有设计约束条件的、坚实可靠的飞行器设计方案. 飞行器的形状将决定飞行器下列的诸多特性: 飞行器的结构形式; 与机身一体化设计的熱防护系统的类型和其所用的材料;飞行控制系统; 飞行力学特性和飞行轨迹等. 反过来, 飞行器的飞行轨迹又会决定飞行器所受到的气动加热、载荷, 影响到飞行器的气动弹性力学特性、飞行器的性能和飞行器的重量. 气动和隐身也是相互交叉耦合的. 为了进行多学科设计优化所必不可少的几种能力, 目前还都处于不成熟的状态.
(7) 智能变形飞行器技术 近空间飞行器从地面或运载平台上起飞, 穿越大气层飞行, 执行各种任务使命, 其飞行环境(高度、飞行马赫数等) 变化很大; 固定外形的飞行器很难适应如此广泛的环境参数变化, 始终保持优良的使用性能. 因此要采用智能变形飞行器技 术(morphing aircraft technology, MAT). 随着空气动力、智能材料和控制技术的发展, 这种设想正逐步变成现实. 智能变形包括两层含义: 对变形进行智能控制和以智能材料与结构为基础实现变形. 需要重点解决的关键技术问题有: 可变形飞行器气动性能预测和气动布局研究, 可变形飞行器总体与设计优化, 变形过程及变形前后的飞行稳定性与操纵特性, 可变形飞行器的飞行控制技术, 智能材料与结构的应用技术.