PLC第4章 S7-1200 顺序控制设计法与顺序功能图
合集下载
PLC顺序控制与顺序功能图课件

指令表 SCRE 3、顺控继电器转移指令
指令表 SCRT S位
梯形图 梯形图 梯形图
S位 SCR
SCRE S位 SCRT
课题六、顺序控制(二)
小结
4、编程:先写“步及步的转移”,再写“步的动作”。 A、进入初始步:看进入条件,写“触点”;看箭头及
所指向的“(初始)步”,写“置位 (初始)步”;再写“复位(其它所 有步)”;最后直接写初始步要完成 的其它工作。
4.1 几个例子 (1)单序列:
SM0.1
S0.0
I1.0
S0.1
Q0.0
I1.1 S0.2
Q0.1
I1.2
课题六、顺序控制(二)
4.1 几个例子 (2)单序列(立即停止):
SM0.1+I0.0
S0.0
I1.0
S0.1
Q0.0
I1.1 S0.2
Q0.1
I1.2
以下程序同前。
课题六、顺序控制(二)
S1.1 T42
2秒 2秒
4秒
S0.3 T39
S0.4 T40
S0.5 T41
S1.2 T43 S1.3 T44
2秒 2秒
S1.4 T45 S1.5 T46
SM0.1+I0.1 S0.0
I0.0
T39·C0
S0.1 T37
S0.2 T38
S0.3 T39·C0
S0.4 T40
S0.5 T41
S0.6
T41
S0.6
S1.1 Q0.5 T42 T42
S1.2 Q0.3 T43 T43
S1.3 T44 T44
S1.4 Q0.3 T45 C1 T45·C1
S1.5 Q0.4 T46 T46
指令表 SCRT S位
梯形图 梯形图 梯形图
S位 SCR
SCRE S位 SCRT
课题六、顺序控制(二)
小结
4、编程:先写“步及步的转移”,再写“步的动作”。 A、进入初始步:看进入条件,写“触点”;看箭头及
所指向的“(初始)步”,写“置位 (初始)步”;再写“复位(其它所 有步)”;最后直接写初始步要完成 的其它工作。
4.1 几个例子 (1)单序列:
SM0.1
S0.0
I1.0
S0.1
Q0.0
I1.1 S0.2
Q0.1
I1.2
课题六、顺序控制(二)
4.1 几个例子 (2)单序列(立即停止):
SM0.1+I0.0
S0.0
I1.0
S0.1
Q0.0
I1.1 S0.2
Q0.1
I1.2
以下程序同前。
课题六、顺序控制(二)
S1.1 T42
2秒 2秒
4秒
S0.3 T39
S0.4 T40
S0.5 T41
S1.2 T43 S1.3 T44
2秒 2秒
S1.4 T45 S1.5 T46
SM0.1+I0.1 S0.0
I0.0
T39·C0
S0.1 T37
S0.2 T38
S0.3 T39·C0
S0.4 T40
S0.5 T41
S0.6
T41
S0.6
S1.1 Q0.5 T42 T42
S1.2 Q0.3 T43 T43
S1.3 T44 T44
S1.4 Q0.3 T45 C1 T45·C1
S1.5 Q0.4 T46 T46
顺序功能图及顺序控制设计法

顺序控制梯形图的设计方法
❖ 起保停电路的设计方法 ❖ 以转换为中心的设计方法 ❖ 使用SCR指令的设计方法
13
Software
Hardware Software Workshop
4.2 使用SCR指令的顺序控制设计法
4.2.1 顺序控制指令LSCR、SCRT、SCRE
LAD
STL
功能
LSCR S-bit 顺序状态开始
– 并行序列编程 • N个后续步是由前级步同时起动的。 • 结束前级步,只需将N个后续步的任一常闭触点 串入该步线圈回路。
29
Software
Hardware Software Workshop
选择序列分支的编程方法
M0.1 I0.1
M0.2
I0.2 M0.3
I0.3 M0.4
I0.4 M0.5
30
Software
Hardware Software Workshop
第4章 顺序功能图程序设计方法
Software
Hardware Software Workshop
梯形图中的基本电路
❖ 起保停电路和置复位电路
2
Software
Hardware Software Workshop
顺序控制设计法与顺序功能图
选择结构流程控制
❖ 以运料小车控制为例
45
Software
Hardware Software Workshop
Software
Hardware Software Workshop
47
Software
Hardware Software Workshop
并行结构流程控制
❖ 以交通信号灯控制为例
《PLC应用技术》ppt课件第四单元 顺序功能图
图4-21 自动门控制示意图
二、原理分析
为了用PLC控制器来实现自动门控制系统,PLC需要5个输入点,4个输出 点,输入输出点分配见表4-3。 表4-3 输入输出点分配表
输入继电器 作用 输出继电器 作用
X0
X1 X2 X3
红外感应器
开门减速开关 开门极限开关 关门减速开关
Y0
Y1 Y2 Y3
电机高速开门
四、任务实施
1.将二个模拟按钮开关的常开触点分别接到PLC的X0和X1(如图4-18所示的 输入部分),并连接PLC电源。检查电路正确性,确保无误。
2.输入图4-16所示的梯形 图,进行程序调试,调试时 要注意动作顺序,运行后可 任意按下X0(或X1),监控 观察各输出化,检查是否完成了按 钮式人行道交通灯所要求的 功能。
(1)以转换条件作为停止电路
将图4-25b 中M2的常闭触点用转换条件X3的常闭触点代替即可,如图4-25c所
示。
图4-25 仅有两步的小闭环
(2)在小闭环中增设一步
如图4-26a所示,在小闭环中增设了M10步就可以解决这一问题,这一步没有什 么操作,它后面的转换条件“=1”相当于逻辑代数中的常数l,即表示转换条件总是满 足的,只要进入步M10,将马上转换到步M2去。图4-26b是根据图4-26a画出的梯形 图。
图4-24 自动门控 制梯形图
三、知识链接
1.用启-保-停电路实现的选择序列的编程方法
(1)选择序列分支的编程方法 如果某一步的后面有一个由N条分支组成的选择序列,该步可能转换到不同的N 步去,应将这N个后续步对应的辅助继电器的常闭触点与该步的线圈串联,作为结束 该步的条件。如图4-23中步M4之后有一个选择序列的分支,当它的后续步M5或者M6 变为活动步时,它应变为不活动步。所以需将M5和M6的常闭触点串联作为步M4的停 止条件。 (2)选择序列合并的编程方法 对于选择序列的合并,如果某一步之前有N个转换(即有N条分支在该步之前合并 后进入该步),则代表该步的辅助继电器的启动电路由N条支路并联而成,各支路由某 一前级步对应的辅助继电器的常开触点与相应转换条件对应的触点或电路串联而成。 以步M1为例,对应的起动电路由两条并联支路组成,每条支路分别由M0、X0和M6、 T1的常开触点串联而成。
S7-1200接线及小车顺序控制
可以自己定义其内部寄存器的地址,在工作区点击PLC,在任务卡 栏点常规选卡,在任务卡下点“系统和时钟存储器”,在右边点 选启用系统存储器,在系统存储器字节地址中输入你想要设定的 存储器地址,下面显示4个低4位的状态:首次循环、诊断状态已 更改、始终为1、始终为0。
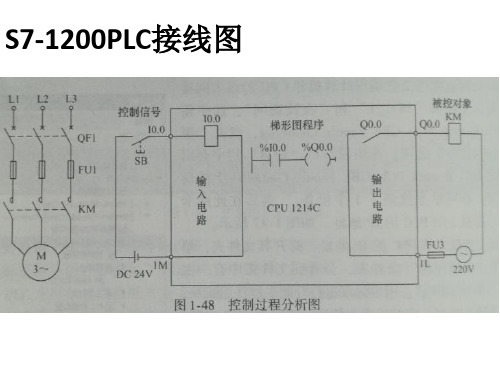
S7-1200PLC接线图
当按下启动按钮时,小
车由原点SQ0处前进(Q0.0 动作)到SQ1处,停留2s返 回(Q0.1动作)到原点,停 留3s后前进至SQ2处,停留 2s后返回到原点。当再次按
下启动按钮时,重复上述动 作。
西门子PLC S7-1200里面有特殊继电器吗? 具体地址多少?
S7-1200PLC接线图
当按下启动按钮时,小
车由原点SQ0处前进(Q0.0 动作)到SQ1处,停留2s返 回(Q0.1动作)到原点,停 留3s后前进至SQ2处,停留 2s后返回到原点。当再次按
下启动按钮时,重复上述动 作。
西门子PLC S7-1200里面有特殊继电器吗? 具体地址多少?
第4章 顺序功能流程
第四章 顺序功能流程图
4.4 跳步、重复和循环序列结构
跳步、重复和循环序列结构实际上都是选择序 列结构的特殊形式 。
第四章 顺序功能流程图
4.5 绘制顺序功能图的注意事项
(1)两个步绝对不能直接相连,必须用一个转换将它们隔开。 (2)两个转换也不能直接相连,必须用一个步将它们隔开。 (3)顺序功能图中的初始步一般对应于系统等待起动的初始状态,初始 步可能没有输出处于ON状态,但初始步是必不可少的。 (4)自动控制系统应能多次重复执行同一工艺过程,因此在顺序功能图 中一般应有由步和有向连线组成的闭环。
4.2 选择序列结构
选择序列有开始和结束之分。选择序列的开始称为分支, 选择序列的结束称为合并。 选择序列的分支是指一个前级步后面紧接着有若干个后 续步可供选择,各分支都有各自的转换条件。分支中表 示转换的短划线只能标在水平线之下。
第四章 顺序功能流程图
4.3 并行序列结构
并行序列也有开始和结束之分。并行序列的开 始也称为分支,并行序列的结束也称为合并。
第四章 顺序功能流程图 单序列结构的编程方法
第四章 顺序功能流程图 选择序列结构的编程方法
第四章 顺序功能流程图 并行序列结构的编程方法
第四章 顺序功能流程图
机械手的控制
机械手将工件从A点向B点传送。机械手的上升、下降与左 移、右移都是由双线圈两位电磁阀驱动气缸来实现的。抓手对 工件的松夹是由一个单线圈两位电磁阀驱动气缸完成,只有在 电磁阀通电时抓手才能夹紧。该机械手工作原点在左上方,按 下降、夹紧、上升、右移、下降、松开、上升、左移的顺序依 次运动。它有手动、单步、一个周期和连续工作(自动)四种 操作方式。
第四章 顺序功能流程图 选择序列结构的编程方法
PLC课件4-顺序功能图

网络4
控制程序 检测2秒,工件是高的,且下站已准备好
M30.2 M10.2 T2 I0.3 I0.7
网络1
工件已准备好+无杆汽缸在下位+伸缩汽缸在缩回位置+安全传感器(空为1)+开始按钮
M30.2 I0.0 I0.5 I0.6 I0.2 I1.0
M10.0
网络5
M11.0
S
M11.0
延时2秒
R
M30.2 M10.3 T3
功
M 0.4
M 0.7
C0减1
M 1.0
Q4.5
能
图
C0 (已钻完6个孔) C0 (未钻完)
如
M1.1
Q4.6 (松开)
图
I0.7 (已松开)
第29页,共48页。
思考 试用梯形图实现控制
电路和输出电路!!
第30页,共48页。
控制电路的梯形图实现如图
第31页,共48页。
第32页,共48页。
第33页,共48页。
M 0.0
I 0.0
M 0.1
Q 4.0
I 0.2
I 0.1
M 0.2 I 0.3
Q 4.1
M 0.3
Q 4.2
I 0.4 M 0.4
I 0.6
M 0.5
Q 4.3
I 0.5
M 0.6
Q 4.4
第22页,共48页。
控制电路的梯形图实现如图
第23页,共48页。
输出电路的梯形图实现如图
第24页,共48页。
第28页,共48页。
专
M 0.0
预置C0
用
起动
I0.0·I0.3·I0.5
钻
PLC第4章 S7-1200 顺序控制设计法与顺序功能图
图4-6 小车自动往返的梯形图
4.1 经验设计法
此梯形图存在的问题: 在两端点处不能可靠停车
I0.0 I0.3 Q0.0 I0.1 I0.4 Q0.1 I0.0 I0.3 I0.2 Q0.0 Q0.1 I0.1 I0.4 I0.2 Q0.1 Q0.0
图4-6 小车自动往返的梯形图
4.1 经验设计法
SB3
KM2
SB2
KM1
M 3~
KM1
KM2
4.1 经验设计法
将继电器电路转换为梯形图 • 确定PLC的输入信号和输出信号。 • 画PLC的外部接线图 • 启动/停止一般使用常开按钮 • 互锁使用常闭开关
图4-3 PLC的外部接线图
4.1 经验设计法
将继电器电路转换为梯形图 • 控制线路图 >> 梯形图 • 注意互锁环节
QS L1 L2 L3 SB1 KM1 按下SB1, KM2线圈失电, KM2辅助常开触 点断开,解除自锁 KM2常开触点断 开,电机停转 U V W FR KM2 SB2 KM1 SB3 KM2 FU1 FU2 FR
SB3
KM2
SB2
KM1
M 3~
KM1
KM2
4.1 经验设计法
QS L1 L2 L3 SB1 KM1 松开SB1 KM2 SB2 FR U V W KM1 SB3 KM2 FU1 FU2 FR
KM1 Q0.0
I0.3 SQ1
I0.4 SQ2
4.1 经验设计法
KM2 Q0.1 KM1 Q0.0
I0.3 SQ1
I0.4 SQ2 I0.0 I0.1 I0.4 I0.2 Q0.1 Q0.0
I0.3
Q0.0 I0.1 I0.4 Q0.1 I0.0 I0.3 I0.2 Q0.0 Q0.1
第4章 顺序功能图(SFC)及步进顺控指令 《西门子PLC系统综合应用技术》课件
第4章
4.1.2 顺序功能图的组成
顺序功能图主要由“状态”或称“步”、“转移”、“动作“及有向线段等元素组成。 1)状态(步):状态是控制系统中一个相对不变的性质,对应于一个稳定的情形。状 态包括初始状态和工作状态。在状态方框中的编号是这一个状态的编号,状态的编号 采用顺序控制继电器S的一个位来表示,在S7-200中顺序控制继电器S从S0.0~S31.7 共256个位,使用时可以不按顺序。 2)动作 控制过程中的每一个状态,它可以对应一个或多个控制动作,也可以不做动 作只是等待。 3)转移: 转移由有向线段与转移条件组成。 有向线段:表示状态转移的方向。当转移的方向从上到下进行转移时,有向线段的箭头 省略不画。 转移条件:当转移条件成立且当前状态为动状态,控制系统就从当前状态转移到下一个 相邻的状态。
4.2 顺控继电器指令 4.2.1 顺控继电器指令介绍 1. 顺序状态开始指令:顺序状态开始指令(LSCR)标志着SCR段的 开始, 2. 顺序状态转移指令:顺序状态转移指令(SCRT)将程序控制权从 一个激活的SCR段传递到另一个SCR段。 3. 顺序状态结束指令:顺序状态结束指令(SCRE)标志着SCR段的 结束,。 4. 条件顺序状态结束指令:条件顺序状态结束指令(CSCRE)可以使 程序退出一个激活的程序段而不执行CSCRE与SCRE之间的指令。
4.4.3 3台电动机顺序起动逆序停止控制举例
4.4.3 3台电动机顺序起动逆序停止控制举例
4.3.2 选择性分支结构
选择性分支结构是一 个控制流可以转入多 个可能的控制流中的 某一个,不允许多路 分支同时执行。具体 进入哪个分支,取决 于控制流前面的转移 条件哪一个为真。
4.3.3 并发性分支结构 如果某一个工作步执行完 成后,需要同时转向若干 条分支,这种结构称为并 发性分支或并行分支结构。 当一个控制状态流必须分 成多个分支时,所有的分 支控制状态流必须同时激 活;当多个控制流汇集成 一个控制流,称之为合并。 当控制流合并时,所有的 并行分支必须都完成,才 能执行下一个状态。并发 性分支结构的分支开始和 汇合一般用双水平线表示。
专题:顺序控制设计法与顺序功能图.
顺序功能图组成
专题:顺序控制设计法与顺序功能图
1、步
5
0
(a)
(b)
顺序功能图组成 1、步
按启动按钮I0.0后, 先开引风机,延时 12s后再开鼓风机; 按下停止按钮I0.1后, 应先停鼓风机,10s 后再停引风机。
Q0.0引风机,Q0.1鼓风机
专题:顺序控制设计法与顺序功能图
初始步
M0.1M0.2M0.3
顺序功能图组成 2、动作说明
专题:顺序控制设计法与顺序功能图
一个步表示控制过程中的稳定状态,它可以 对应一个或多个动作。在步右边加一个矩形 框,在框中用简明的文字说明该步对应的动 作。
顺序功能图组成 2、动作说明
活动步:
专题:顺序控制设计法与顺序功能图
当系统处于某一步所在的阶段时,该步处
组成: 1、步 2、动作
3、转换条件
4、有向连线
顺序功能图组成
专题:顺序控制设计法与顺序功能图
1、步 控制系统中的一个相对不变 的性质,对应于一个稳定的 状态
初始步对应控制系统的初始状态, 是系统的起点,一个系统至少有 一个初始步,用双框线表示 相邻两步之间的状态总是不同的 步用矩形框表示,有编号
6
专题:顺序控制设计法与顺序功能图
二 、顺序控制设计法与顺序功能图
2.1 控制系统简介
过程控制(Process Control):侧重生产过程中工艺
参数的监视、调节与控制。 例如DCS,包括:
• 逻辑控制: • 顺序控制SCS (Sequence Control System):侧重
生产设备的启停和工艺流程的联动与闭锁关系。
M0.6
25s 3s 2s 45s
顺序功能图
连的常开触点,当某一步为活动步时相应的STL触点接 通,该步的负载被接通。
▪ 与STL触点相连的触点应使用LD或LDI指令(RET) ▪ STL触点可以直接驱动或通过别的触点驱动Y. M.S.T ▪ 由于CPU只执行活动步对应的电路块,使用STL指令允
许双线圈输出,即同一编程元件的一个线圈可用不同的 STL触点驱动。
▪ 步进梯形指令STL只有与状态继电器S配合
才具有步进功能。S0~S9用于初始步, S10~S19用于自动返回原点。使用STL指 令的状态继电器的常开触点称为STL触点, 用符号表示,没有常闭的STL触点。
STL指令的特点1
STL指令的特点2
▪ STL触点除了在并行序列的合并电路外则与左侧母线相
式,称为顺序控制梯形图的编程方式。
▪ 在个人计算机中用的PLC编程语言,可由
顺序功能图直接生成指令表程序等。也 可由梯形图或指令表生产成顺序功能图 对系统进行监控。
▪ 顺序控制梯形图的编程方式主要有:
▪ 使用STL指令的编程方式 ▪ 使用起保停电路的编程方式
起动、保持、停止电路的 编程方法
▪ 单序列结构的编程方法
▪ 步进指令 ▪ 单序列结构的编程方法 ▪ 选择序列结构的编程方法 ▪ 并行序列结构的编程方法
步进指令
▪ 许多PLC都有专门用于编制顺序控制程序
的步进梯形指令及编程元件。
▪ 步进梯形指令简称为STL指令,FX系列
PLC还有一条使STL指令复位的RET指令。 利用这两条指令,可以很方便地编制顺序 控制梯形图程序。
选择序列结构
▪ 选择序列有开始和结束之分。选择序列的开始称
为分支,选择序列的结束称为合并。
▪ 选择序列的分支是指一个前级步后面紧接着有若
▪ 与STL触点相连的触点应使用LD或LDI指令(RET) ▪ STL触点可以直接驱动或通过别的触点驱动Y. M.S.T ▪ 由于CPU只执行活动步对应的电路块,使用STL指令允
许双线圈输出,即同一编程元件的一个线圈可用不同的 STL触点驱动。
▪ 步进梯形指令STL只有与状态继电器S配合
才具有步进功能。S0~S9用于初始步, S10~S19用于自动返回原点。使用STL指 令的状态继电器的常开触点称为STL触点, 用符号表示,没有常闭的STL触点。
STL指令的特点1
STL指令的特点2
▪ STL触点除了在并行序列的合并电路外则与左侧母线相
式,称为顺序控制梯形图的编程方式。
▪ 在个人计算机中用的PLC编程语言,可由
顺序功能图直接生成指令表程序等。也 可由梯形图或指令表生产成顺序功能图 对系统进行监控。
▪ 顺序控制梯形图的编程方式主要有:
▪ 使用STL指令的编程方式 ▪ 使用起保停电路的编程方式
起动、保持、停止电路的 编程方法
▪ 单序列结构的编程方法
▪ 步进指令 ▪ 单序列结构的编程方法 ▪ 选择序列结构的编程方法 ▪ 并行序列结构的编程方法
步进指令
▪ 许多PLC都有专门用于编制顺序控制程序
的步进梯形指令及编程元件。
▪ 步进梯形指令简称为STL指令,FX系列
PLC还有一条使STL指令复位的RET指令。 利用这两条指令,可以很方便地编制顺序 控制梯形图程序。
选择序列结构
▪ 选择序列有开始和结束之分。选择序列的开始称
为分支,选择序列的结束称为合并。
▪ 选择序列的分支是指一个前级步后面紧接着有若
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
FR
L3
KM1
KM1辅助常开触点闭 合,对KM1自锁
SB1
KM2
KM1
KM2
SB2
SB3
KM1常开触点闭合, 电机正转
KM1辅助常闭触点断 开,对KM2联锁
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
6
4.1 经验设计法
QS FU1
SB3常开触点闭 合,KM2线圈得电
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
10
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
KM1 KM2辅助常开触点 闭合,对KM2自锁
SB1
KM2
KM1
KM2
SB2
SB3
KM2常开触点闭合, 电机反转
KM1
KM2
SB2
SB3
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
9
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
或不按停止按钮 KM1 SB1,直接按下 反转动按钮SB3,
SB1
KM2
KM1
KM2
SB2
SB3
SB3常闭触点断 开,对KM1联锁,
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
13
4.1 经验设计法
QS FU1
L1 L2 L3
松开SB1
KM1
FU2 FR
SB1
KM2
KM1
KM2
SB2
SB3
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
Q0.1
图4-4 梯形图
福州大学电气工程与自动化学院
16
4.1 经验设计法
➢ 拓展案例1: 按下右行起动按钮SB2或左行起动按钮SB3后,小车在两 个限位开关之间不停地循环往返,按下停止按钮SB1后,
电动机断电,小车停止运动。
KM2 Q0.1
KM1 Q0.0
I0.3 SQ1
I0.4 SQ2
2021/4/11
KM2辅助常闭触点 断开,对KM1联锁
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
11
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
松开SB3,
KM1
SB3常闭触点闭合 SB3常开触点断开
电机继续反转运行
FR
UV W
M 3~
SB1
KM2
KM1
KM1 KM2
14
4.1 经验设计法
❖ 将继电器电路转换为梯形图 • 确定PLC的输入信号和输出信号。 • 画PLC的外部接线图 • 启动/停止一般使用常开按钮 • 互锁使用常闭开关
功能名 触点(物理) I/O接口
正转按钮
SB2
I0.0
反转按钮
SB3
I0.1
停止按钮
SB1
I0.2
热继电器
FR
KM1
SB1
KM2
KM1
KM2
SB2
SB3
KM1辅助常开触点 断开,解除自锁
KM1常开触点断开 ,电机停转
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
8
4.1 经验设计法
QS FU1
L1 L2 L3
松开SB1
KM1
FU2 FR
SB1
KM2
提纲
第4 章
数字量控制系统梯形图程序设计方法
1. 经验设计法 2. 顺序控制设计法与顺序功能图 3. 基于顺序功能图的梯形图设计方法
4.4.1 经验设计法
继电器控制线路(上篇)转换法 先设计继电器控制线路 转换成梯形图语言
2021/4/11
福州大学电气工程与自动化学院
1
4.1 经验设计法
停车
右行
左行
FU2
L1
L2
FR
L3
松开SB2,
KM1
SB2常闭触点闭合 SB2常开触点断开
电机继续正转运行
FR
UV W
M 3~
SB1
KM2
KM1
KM2
SB2
SB3
SB3
SB2
KM2
KM1
KM1 KM2
2021/4/11
福州大学电气工程与自动化学院
7
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
按下SB1, KM1线圈失电,
图4-2 三相异步电动机的正反转控制电路
2021/4/11
福州大学电气工程与自动化学院
2
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
U ---L1 V ---L2 W---L3
KM1
SB1
KM2
KM1
KM2
SB2
SB3
2021/4/11
FR
SB3
UV W
M 3~
U ---L3 V ---L2 W---L1
QS FU1
FU2
L1
L2
FR
L3
按下SB2,
KM1
SB2的常闭触点 断开,对KM2联锁
SB2的常开触点 闭合, KM1线圈得 电
FR
UV W
M 3~
SB1
KM2
KM1
KM2
SB2
SB3
SB3
SB2
KM2
KM1
KM1 KM2
2021/4/11
福州大学电气工程与自动化学院
5
4.1 经验设计法
QS FU1
图4-6 小车自动往返的梯形图
福州大学电气工程与自动化学院
I0.2
正转线圈
KM1
Q0.0
反转线圈
KM2
Q0.1
图4-3 PLC的外部接线图
2021/4/11
福州大学电气工程与自动化学院
15
4.1 经验设计法
❖ 将继电器电路转换为梯形图 • 控制线路图 >> 梯形图 • 注意互锁环节
2021/4/11
I0.0 I0.1 I0.2 Q0.1 Q0.0
Q0.0 I0.1 I0.0 I0.2 Q0.0 Q0.1
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
3
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
合上电源 开关QS
2021/4/11
KM1
SB1
KM2
KM1
KM2
SB2
SB3
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
4
4.1 经验设计法
福州大学电气工程与自动化学院
17
4.1 经验设计法
KM2 Q0.1
KM1 Q0.0
I0.3 SQ1
I0.4 SQ2 I0.0 I0.1 I0.4 I0.2 Q0.1 Q0.0 I0.3 Q0.0
I0.1 I0.0 I0.3 I0.2 Q0.0 Q0.1 I0.4 Q0.1
2021/4/11
图4-5 PLC的外部接线图
KM1
KM2
SB2
SB3
SB3
SB2
KM2
KM1
KM1 KM2
2021/4/11
福州大学电气工程与自动化学院
12
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
KM1 按下SB1, KM2线圈失电,
SB1
KM2
KM1
KM2
SB2
SB3
KM2辅助常开触 点断开,解除自锁
KM2常开触点断 开,电机停转
FR
L3
KM1
KM1辅助常开触点闭 合,对KM1自锁
SB1
KM2
KM1
KM2
SB2
SB3
KM1常开触点闭合, 电机正转
KM1辅助常闭触点断 开,对KM2联锁
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
6
4.1 经验设计法
QS FU1
SB3常开触点闭 合,KM2线圈得电
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
10
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
KM1 KM2辅助常开触点 闭合,对KM2自锁
SB1
KM2
KM1
KM2
SB2
SB3
KM2常开触点闭合, 电机反转
KM1
KM2
SB2
SB3
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
9
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
或不按停止按钮 KM1 SB1,直接按下 反转动按钮SB3,
SB1
KM2
KM1
KM2
SB2
SB3
SB3常闭触点断 开,对KM1联锁,
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
13
4.1 经验设计法
QS FU1
L1 L2 L3
松开SB1
KM1
FU2 FR
SB1
KM2
KM1
KM2
SB2
SB3
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
Q0.1
图4-4 梯形图
福州大学电气工程与自动化学院
16
4.1 经验设计法
➢ 拓展案例1: 按下右行起动按钮SB2或左行起动按钮SB3后,小车在两 个限位开关之间不停地循环往返,按下停止按钮SB1后,
电动机断电,小车停止运动。
KM2 Q0.1
KM1 Q0.0
I0.3 SQ1
I0.4 SQ2
2021/4/11
KM2辅助常闭触点 断开,对KM1联锁
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
11
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
松开SB3,
KM1
SB3常闭触点闭合 SB3常开触点断开
电机继续反转运行
FR
UV W
M 3~
SB1
KM2
KM1
KM1 KM2
14
4.1 经验设计法
❖ 将继电器电路转换为梯形图 • 确定PLC的输入信号和输出信号。 • 画PLC的外部接线图 • 启动/停止一般使用常开按钮 • 互锁使用常闭开关
功能名 触点(物理) I/O接口
正转按钮
SB2
I0.0
反转按钮
SB3
I0.1
停止按钮
SB1
I0.2
热继电器
FR
KM1
SB1
KM2
KM1
KM2
SB2
SB3
KM1辅助常开触点 断开,解除自锁
KM1常开触点断开 ,电机停转
2021/4/11
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
8
4.1 经验设计法
QS FU1
L1 L2 L3
松开SB1
KM1
FU2 FR
SB1
KM2
提纲
第4 章
数字量控制系统梯形图程序设计方法
1. 经验设计法 2. 顺序控制设计法与顺序功能图 3. 基于顺序功能图的梯形图设计方法
4.4.1 经验设计法
继电器控制线路(上篇)转换法 先设计继电器控制线路 转换成梯形图语言
2021/4/11
福州大学电气工程与自动化学院
1
4.1 经验设计法
停车
右行
左行
FU2
L1
L2
FR
L3
松开SB2,
KM1
SB2常闭触点闭合 SB2常开触点断开
电机继续正转运行
FR
UV W
M 3~
SB1
KM2
KM1
KM2
SB2
SB3
SB3
SB2
KM2
KM1
KM1 KM2
2021/4/11
福州大学电气工程与自动化学院
7
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
按下SB1, KM1线圈失电,
图4-2 三相异步电动机的正反转控制电路
2021/4/11
福州大学电气工程与自动化学院
2
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
U ---L1 V ---L2 W---L3
KM1
SB1
KM2
KM1
KM2
SB2
SB3
2021/4/11
FR
SB3
UV W
M 3~
U ---L3 V ---L2 W---L1
QS FU1
FU2
L1
L2
FR
L3
按下SB2,
KM1
SB2的常闭触点 断开,对KM2联锁
SB2的常开触点 闭合, KM1线圈得 电
FR
UV W
M 3~
SB1
KM2
KM1
KM2
SB2
SB3
SB3
SB2
KM2
KM1
KM1 KM2
2021/4/11
福州大学电气工程与自动化学院
5
4.1 经验设计法
QS FU1
图4-6 小车自动往返的梯形图
福州大学电气工程与自动化学院
I0.2
正转线圈
KM1
Q0.0
反转线圈
KM2
Q0.1
图4-3 PLC的外部接线图
2021/4/11
福州大学电气工程与自动化学院
15
4.1 经验设计法
❖ 将继电器电路转换为梯形图 • 控制线路图 >> 梯形图 • 注意互锁环节
2021/4/11
I0.0 I0.1 I0.2 Q0.1 Q0.0
Q0.0 I0.1 I0.0 I0.2 Q0.0 Q0.1
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
3
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
合上电源 开关QS
2021/4/11
KM1
SB1
KM2
KM1
KM2
SB2
SB3
FR
SB3
UV W
M 3~
福州大学电气工程与自动化学院
SB2
KM2
KM1
KM1 KM2
4
4.1 经验设计法
福州大学电气工程与自动化学院
17
4.1 经验设计法
KM2 Q0.1
KM1 Q0.0
I0.3 SQ1
I0.4 SQ2 I0.0 I0.1 I0.4 I0.2 Q0.1 Q0.0 I0.3 Q0.0
I0.1 I0.0 I0.3 I0.2 Q0.0 Q0.1 I0.4 Q0.1
2021/4/11
图4-5 PLC的外部接线图
KM1
KM2
SB2
SB3
SB3
SB2
KM2
KM1
KM1 KM2
2021/4/11
福州大学电气工程与自动化学院
12
4.1 经验设计法
QS FU1
FU2
L1
L2
FR
L3
KM1 按下SB1, KM2线圈失电,
SB1
KM2
KM1
KM2
SB2
SB3
KM2辅助常开触 点断开,解除自锁
KM2常开触点断 开,电机停转