基于黑白摄像头的智能小车路径识别系统设计
基于摄像头智能车典型路径图像识别算法研究
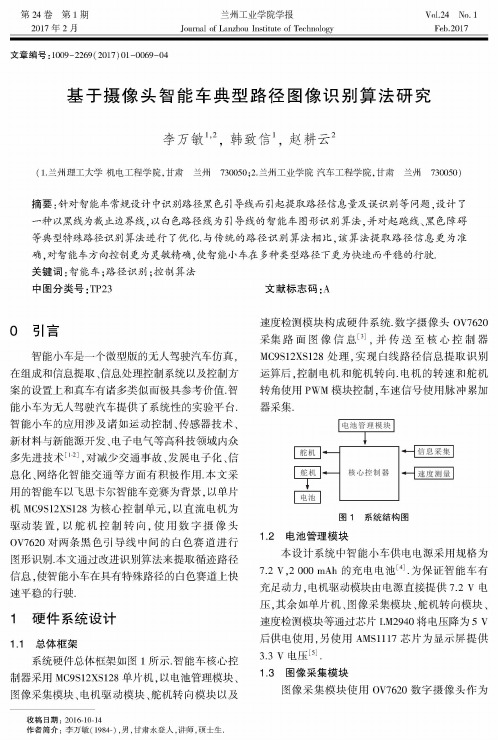
第24卷第1期 兰州工业学院学报 V o l.24 N o.l 2017 年 2 月Journal of Lanzhou Institute of Technology F e b.2017文章编号=1009-2269(2017) 01-0069-04基于摄像头智能车典型路径图像识别算法研究李万敏1>2,韩致信\赵耕云2(1.兰州理工大学机电工程学院,甘肃兰州730050;2.兰州工业学院汽车工程学院,甘肃兰州730050)摘要:针对智能车常规设计中识别路径黑色引导线而引起提取路径信息量及误识别等问题,设计了 一种以黑线为截止边界线,以白色路径线为引导线的智能车图形识别算法,并对起跑线、黑色障碍 等典型特殊路径识别算法进行了优化.与传统的路径识别算法相比,该算法提取路径信息更为准 确,对智能车方向控制更为灵敏精确,使智能小车在多种类型路径下更为快速而平稳的行驶.关键词:智能车;路径识别;控制算法中图分类号:TP23 文献标志码:A0引言智能小车是一个微型版的无人驾驶汽车仿真, 在组成和信息提取、信息处理控制系统以及控制方 案的设置上和真车有诸多类似而极具参考价值.智 能小车为无人驾驶汽车提供了系统性的实验平台.智能小车的应用涉及诸如运动控制、传感器技术、新材料与新能源开发、电子电气等高科技领域内众 多先进技术[|2],对减少交通事故、发展电子化、信 息化、网络化智能交通等方面有积极作用.本文采 用的智能车以飞思卡尔智能车竞赛为背景,以单片 机MC9S12XS128为核心控制单元,以直流电机为 驱动装置,以舵机控制转向,使用数字摄像头OV7620对两条黑色引导线中间的白色赛道进行 图形识别.本文通过改进识别算法来提取循迹路径 信息,使智能小车在具有特殊路径的白色赛道上快 速平稳的行驶.1硬件系统设计1.1总体框架系统硬件总体框架如图1所示.智能车核心控 制器采用MC9S12XS128单片机,以电池管理模块、图像采集模块、电机驱动模块、舵机转向模块以及速度检测模块构成硬件系统.数字摄像头OV7620 采集路面图像信息[3],并传送至核心控制器MC9S12XS128处理,实现白线路径信息提取识别 运算后,控制电机和舵机转向.电机的转速和舵机 转角使用PWM模块控制,车速信号使用脉冲累加 器采集.图1系统结构图1.2电池管理模块本设计系统中智能小车供电电源采用规格为7.2 V,2 000 m A h的充电电池[4].为保证智能车有 充足动力,电机驱动模块由电源直接提供7.2 V电压,其余如单片机、图像采集模块、舵机转向模块、速度检测模块等通过芯片LM2940将电压降为5 V 后供电使用,另使用AMS1117芯片为显示屏提供3.3 V 电压[5].1.3图像采集模块图像采集模块使用 OV7620 数字摄像头作为收稿日期:2016-10-14作者简介:李万敏(1984-),男,甘肃永登人,讲师,硕士生.• 70 •兰州工业学院学报第24卷图像采集传感器.OV7620数字摄像头分辨率可达 到640x480,传输速率最高可达到30帧,支持连续 和隔行两种扫描方式.本设计中采用隔行扫描的方 式,以该摄像头的最高分辨率在黑白模式下采集黑 白赛道上的图像点,将图像点的灰度输出为对应电 压值,得到视频信号,然后转化为可供单片机识别 的数字信号[6].设计当中应针对图像清晰度与单片 机处理速度进行优化计算,每场采集数据点数为 120x40 个.定了智能车在赛道上运行时的快速稳定效能.如果 路径识别算法可靠,代码简洁,抗干扰能力强,则智 能车更加“智能”.这部分是整个智能车软件部分的 核心.本文采用“逐行逐点扫描法”寻找赛道的中线. 标准赛道在摄像头图像中如图3所示.在图中可以 看出,白色赛道犹如一个较宽的引导线,只要检测 出这个“引导线”中线所在位置就可以找到赛道中 线所在位置.运用“逐行逐点扫描法”从整场图像最1.4电机驱动模块本文直流电机驱动电路采用飞思卡尔公司生 产的电机驱动芯片MC 33886.MC 33886是全桥的 电机驱动芯片,输出电流可以达到5 A,可以实现 电机PWM调速,正反转,制动等实时控制功能.并 具有过流,欠压和温度过高自动保护以及故障状态 提示等优点.驱动电路如图2所示.U1PWM04 V1 +J56 OIIT117810LGNDNCF S I N2I N1D1V+CCP0UT10U T20UT10U T2NC D2PGND PGNDPGND PGNDM C338862019PWM1181"1716V1 +15m j T2上n牛14113’VCC l i l1211 ,-^=rC2图2 M C33886电路图下端一行图像的最左端开始扫描,当出现连续的4个白色像素点时就开始记录,直到检测出黑色像素点,则这些白色像素点就形成一个“白条”,根据在这个白条中的第一个白点和最后一个白点的位置,计算出这个白条的长度和中心位置.设第一个白点位置为^,最后一个白点位置为A,则白条宽为(Z2-Z J,白条中心点位置为(Z i+(Z2-Z i)/2);之后,继续以同样的方法扫描,直到将本行扫描完毕.之后,计算每个白条的中心点与当前视野中线的差值,取差值最小的那个白条的中点作为本行白色“引导线”的中心位置.再扫描后一行,即图像中的上方一行,扫描方法相同,只是在此行中,扫描出的各个白条的中心点与前一行的白色“引导线”的中线位置做差值,而不是当前视野中线.以后每行图像扫描与此行相同,直到扫描完整场图像,找到每一行的“引导线”的中线位置.算法流程图如图41.5舵机驱动模块本文采用了额定工作电压为5 V的S 3010型 舵机,通过将舵机电压在允许范围内提升至6.5 V,得出其动作速度(0.14±0.02)s/60°,舵机的反应时 间更加灵敏,转向灵活,使智能小车进人S弯适应 快速、循迹通过.舵机的控制依靠单片机输出的PWM信号,在试验中,将控制舵机动作的PWM脉 冲频率优化至120Hz,大幅提升了舵机PW M的控 制周期,在有效保证了转向控制精度的基础上,使 舵机灵敏度更高.2智能车软件系统设计2.1路径信息识别算法图像信息采集与数据处理是该智能车控制系 统核心部分之一.图像数据处理和路径识别算法决所示.(a)灰度图 (b)二值化黑白图图3标准赛道图像2.2特殊路径识别算法2.2.1起跑线识别算法起跑线标志着计时的开始和结束,当智能车沿 跑道跑完一圈后要能自动停止在起跑线后3 m之 内的距离.根据此要求,智能车必须能够识别出起 跑线,从而做出正确的响应.当车模运行到起跑线 附近后,摄像头拍摄到的起跑线如图5所示.当车第1期李万敏等:基于摄像头智能车典型路径图像识别算法研究•71.3个漆包线V50k H z;100m A图4算法流程图9c m赛道宽度距离:45c m图5起跑线示意图与采集图像模起步后首先采用常规路径识别算法进行路径检 测,从视野最近端的一行信息开始扫描,当找到本 行中的白条(即本行中连续不断的若干白色像素 组成的横线)时,记录白条的宽度(本行图像中连 续的白色像素的个数)和位置(白条最中点在视野 中的位置).当在一行图像中,经过搜索发现“黑-白-黑-白-黑-白-黑”的像素排布,则初步认为有可 能是起跑标志线,之后进行确认判断,根据起跑线 在视野中的几何特征,先判断位置在最中间的两个 黑条的宽度是否小于最中心白条的宽度的2倍,是 否大于最中心白条的宽度的1/2,若不满足,则认 为是噪声干扰,继续进行下一行的扫描检测,若满 足条件,就继续判断黑条的远处一行或近处一行相同位置是否也为黑,若满足就认为在这一场图像中 出现了起跑标志线,其余行不再扫描,智能车ECU 作出舵机回正,电机刹车的指令.若不满足,则继续 按以上所述方法逐行扫描,直到本场图像扫描完. 起跑线识别流程图如图6所示.图6起跑线识别流程图2.2.2障碍识别算法障碍在摄像头图像中如图7所示.对应障碍的 识别,是在路径识别算法的基础上通过加人额外的下一个个i 起跑区I车模运行方向•72.兰州工业学院学报第24卷判断条件进行识别.识别障碍的条件和方法如下: 当扫描出“黑-白-黑-白-黑”像素分布时,判断两个 白条的宽度,当一个白条的宽度大于另一个白条宽 度的2倍,而且中间黑色部分的黑色像素点超过5 个,就认为视野中出现障碍,取较宽的那个白条的 中点坐标作为本行图像的赛道中线,此时,障碍就 相当于赛道右侧边界.这样继续扫描下一行,直到 本场图像的所有行扫描完毕.之后根据赛道中线在 视野中的位置,控制舵机转向,电机减速.(a )灰度图 (b )值化图图7障碍采集图像3结语优化后的路径识别算法,经过实际测试,在路径识别及对驱动电机和转向舵机的控制方面效果良好,智能小车在规定的赛道路径上平稳快速的行 驶,工作可靠.参考文献:[1] 王子辉,叶云岳.基于CMOS 传感器的智能循迹小车图像识别技术研究[J ].传感技术学报,2009(4):484-488.[2] 李旭东,廖中浩,孟娇.基于CMOS 摄像头的智能车控制系统设计与实现[J ].吉林大学学报,2013,31 (4): 414-418.[3] 林皓岳,董晓庆.基于CMOS 摄像头识别路径的智能车控制系统设计[J ].韩山师范学院学报,2009 (6):52-56.[4] 刘鸣,张翰林,隆昌宇.基于CMOS 传感器的智能车赛道自动寻迹系统[J ].光机电信息,2010( 10) :59- 62.[5] 曾星星.基于摄像头的路径识别智能车控制系统设计[J ].湖北汽车工业学院学报,2008(6):76-80.[6] 陈庆强,汤龙梅,蔡文培.基于摄像头的智能车路径识别与方向控制算法[J ].福建工程学院学报,2015(3) :229-234.Research on the Image Recognition Algorithm for TypicalPath of Camera-based Smart CarL I W a n -m i n ,H A N Z h i -x i n ,Z H A O G e n g -y u n(1.M echanical & Electrical E ngineering College,L anzhou U n iversity ^ o f Science and Technology,L an zhou 730050, China ;2.College o f A utom otive Engineering,L anzhou In stitu te o f Technology,L an zhou 730050,China )Abstract : Aiming at such problems as path information retrieval and misidentification caused by path recognitionblack guide line in the conventional design of smart vehicle,the paper intends to design an image recognition al gorithm ,with a black line as the boundary line and the white path line as the guide line,and to optimize the typ ical path recognition algorithm , such as starting line , black barriers and so on . Compared with the traditional path identification algorithm , this algorithm is able to retrieve the path information more accurately , and it is more sensitive and accurate in the direction control of the smart vehicles , which can in turn guarantee the speedy and steady steering of the smart vehicle in varied paths .Key words : smart vehicle ; path recognition ; control algorithm(责任编辑:曾贤灏)。
基于摄像头的智能小车寻迹系统设计

制式的复合全 电视信号 , 每秒输 出
帧 , 每帧分为偶场和奇场。黑白视频
图像信号 由图像信号 、消隐信号及 同
步信号共 同组成 。场 同步脉冲标志着
新 的一场 到来 。场 消 隐 区恰好跨 在一
场的结尾部分和下场的开始部分 , 得
等到场消 隐区过去 , 下场 的视频信号
才真正到来 。 制式的摄像头每秒
盯 肠 洲 肠 弱 孙 盯舫 洲转 弱肪盯转肠 科邪弱骆毖二”
器 幻器 创和弱 邪科义肠洲弱黔毖转 蕊弱黔肠毖科胎盯 肠郭马黔毖弱科邪洲 公弱孙交岛肠北蕊黔 肠弱洲北岛黔科毖芡 弱科肠舫毖节翁幻胎 肠岛黔马北科
】
摄 卿互
像
头
一」 以泣
】尹
卫型竺
】朋
四
沂导
器
图 摄像头采样 电路 图
提取 中心点
当前点取前 一个点的值
为获得 充足的图像信息 , 实现对
智能车准确控 制 , 图像采集每场 为
个点 。通过实验证 明 ,
的
图像能够得到满意 图像信息 。采集效
果如 图 所示 。图中数值为 一 表示
黑线所在位置 。
图像处理
了防止 场地 黑线 干扰 导 致控 制 出 错 , 需要对整幅 图像进行滤波处理 。 因为黑色指 引线是一条平滑连续的曲 线 , 因此对于 图像 中出现 的那些跳跃 性较大的点即可视 为干扰加 以去除 。
滤波方法有很 多 , 如 中值滤波对
图 插值算法流程 图
单 片机开销较大 , 因此本 系统采 用对 整 幅图像 进行较 为简单的插值处理 。 这样不仅 占用 时间少 , 而且也实 现 了对 实时控 制的要 求 。摄像头提取 到的近处黑线信息 出错 的概率 非常 小 , 因此利 用近处黑线的 中心偏差 , 对前 方的黑线 中心偏差进行插值滤 波 。其 滤 波 流程 图如 图 所 示 。插 值 滤波时 , 同时要注意小车在过急弯时 的情 况 , 因此要 对插值 后 的黑 线 中心 进行限幅处理 。
基于摄像头的路径识别智能车控制系统设计 (1)

由于MC9S12DP256的AD采集速度有限,须 利用图像采集模块提取出摄像头信号的行同步脉 冲、消隐脉冲和场同步脉冲以供单片机作控制之 用。LMl881视频同步信号分离芯片可从摄像头信 号中提取信号的时序信息,如行同步脉冲、场同步 脉冲和奇、偶场信息等。并将它们转换成1TrL电平
直接输给单片机的I/O口作控制信号之用。 LMl88l的端口接线方式如图2所示。 1.3电机驱动电路设计
本文所述基于摄像头路径识别的智能车控制 系统.以电动小车为研究对象,通过车载CCD摄像 头动态摄取路面图像.识别白色场地中的任意黑色
带状导引线.控制电动小车以设定目标速度沿导引 线自动行驶.为使电动小车在行驶过程中保持一定 的稳定性和平顺性.控制系统中对导引线路径信息 识别、路径定位与方向偏差控制等主要控制功能提 出了较为理想的解决方案。
interference performance,and small steady state error.
Key words:CCD camera;path information;sman car
随着生产技术的发展和自动化程度的提高.传 统制造业的生产方式发生了深刻的变化。在自动化 领域中.许多复杂性操作和或对人体有害的工作都 由机器自动完成.为了实现这一工作.就要求机器 有一定的智能性。
别为(“。,秽。)、(“:,秽:),则该行上路径中线上点
基于图像识别的智能小车系统设计
第1章绪论1.1 课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2 国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段 20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。
基于摄像头的智能车路径识别方案

基于摄像头的智能车路径识别方案摘要:智能车硬件平台开采用飞思卡尔 16 位微控制器 MC9S12DG128 为核心的控制单元,由清华大学飞思卡尔嵌入式系统研发中心提供的开发板MC9S12EVKC 单片机最小系统板,并在此基础上自行完成的外围硬件电路设计;软件开发环境使用Metrowerks 公司为 MC9S12 系列单片机专门提供的全套开发工具 CodeWarrior IDE。
文中介绍了智能车的系统总体结构,软硬件模块及开发流程。
其中重点介绍摄像头的硬件电路的设计,摄像头输出数字信号的采集,视频图像信号处理及控制系统硬件电路设计,速度与转向控制算法,以及包括调试中遇到的问题的解决方法。
关键字:智能车,摄像头,视频数据采集,路径识别,速度与转向控制Intelligence Car Based On Digital Camera Abstract:In this article, article present the embedded systems design results of Wuxi professional collage of science and technology zhenze motorcade working during the period of preparing the fourth session of the Freescale Intelligence Car Competition, Including hardware design, software design of smart car. the hardware platform of the smart car bases on S12 development board which features MC9S12DG128 micro-controller, Freescale Embedded Systems, Tsinghua University R & D Center provides the development board of the smallest single-chip system board MC9S12EVKC, And on this basis to the completion of the external hardware circuit design software development environment software development used Code warrior IDE as its tool, which is Metrowerks Corporation technically provide a complete set of development tools to MC9S12 series of single-chip.This article introduces the intelligent car systems architecture, software and hardware modules and development process, Which focuses on Camera hardware circuit design, Camera output digital signal collection, Video image signal processing, Control system hardware circuit design, speed and direct control algorithm, As well as the solution of problem in debugging.Key Word: Intelligent car, Camera, Video Sample Collection, Speed and Direct Control目录第一章绪论 (3)1.1课程意义 (3)1.2课题背景 (3)1.3任务 (4)第二章硬件系统设计 (5)2.1单片机主要元件介绍 (5)2.1.1 摄像头的介绍 (5)2.2硬件总体框图 (6)2.2.1 电源、稳压电路 (7)2.2.2 单片机控制板 (9)2.2.3 测速电路 (10)2.2.4 摄像头电路 (10)2.2.5 舵机电路 (11)2.2.6 软件方案选择电路 (11)2.2.7 电机驱动电路 (12)2.2.8 调试电路 (13)第三章软件系统设计 (14)3.1软件总体框架 (14)3.2图像采集与处理 (14)3.2.1 采集方法 (14)3.2.2 路径识别 (17)3.3速度和方向的控制 (21)3.3.1 PID算法介绍 (21)3.3.2 闭环控制 (23)谢辞 (24)参考文献 (24)第一章绪论1.1 课程意义通过智能车的软硬件设计,较为深入的了解嵌入式设计,提升自己的知识层面,拓展自己的思维,增强自己的动手能力,提高团队协作能力,为以后向嵌入式方向发展打下一定的基础。
基于摄像头识别路径的智能车系统设计

De s i g n o f s ma r t c a r s y s t e m wi t h c a me r a - b a s e d p a t h r e c o g ni t i o n
GAO Yu n - b o, J I Co n g,HAN P e n g - wu
c e s s i n g o f e x t e r n a l i n t e r f e r e n c e n o i s e ,a k i n d o f i ma g e p r o c e s s i n g a l g o r i t h m wi t h a d a p t i v e d y n a mi c t h r e s h —
测试结果表明 , 自适 应动态阈值 图像处理算 法在智 能车路径识 别 中具 有明显 的优 势, 通 过该算 法对 图像 进行 有效
的处 理, 可 以增加智 能车对路径 的跟随性 能.
关 键 词 :智 能 车 ;路 径 识别 ;动 态 阈 值
Байду номын сангаас
中图分类号 : TP 3 9 1
文献标识码 : A
第3 9卷 第 6 期
2 0 1 3 年 1 2月
兰
州
理
工
大
学
学
报
Vo L 3 9 No . 6
De c . 2 0 1 3
J ou r n a l o f L a n z h o u Un i v e r s i t y o f Te c h n o l o g y
( K6 0 )wa s t a k e n a s k e r n e l c o n t r o l l e r ,a n d B l u e t o o t h Co mmu n i c a t i o n mo d u l e wa s u s e d t o c o n d u c t o n l i n e
基于图像识别的智能小车系统设计-毕业论文
---文档均为word文档,下载后可直接编辑使用亦可打印---绪论1.1 课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2 国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段 20世纪50年代是智能车辆研究的初始阶段。
1954年美国BarrettElectronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。
基于摄像头的自动寻迹智能车控制系统设计
基于摄像头的自动寻迹智能车控制系统设计雷钧,李峰波(湖北汽车工业学院电气与信息工程学院,湖北十堰 442002)摘要:本文介绍了基于飞思卡尔MC9S12DG128单片机控制的智能车系统,该系统以摄像头传感器作为路径识别装置,通过图像识别提取路径信息。
文章对智能车寻线控制系统的软、硬件设计思路和控制算法等进行了论述。
测试结果表明智能车能准确稳定地跟踪引导线。
关键词:智能车;自动寻迹;MC9S12单片机;图像识别中图分类号:TP273;TP242.6 文献标识码:A0 概述自动寻迹智能车涉及到当前高技术领域内的许多先进技术,其中最主要的是传感技术、路径规划和运动控制。
本课题是以智能车竞赛为背景,以单片机作为核心控制单元,摄像头作为路径识别传感器,以直流电机作为小车的驱动装置,舵机控制小车转向。
车模竞赛的赛道是一个具有特定几何尺寸约束、磨擦系数及光学特性的KT板,其中心贴有对可见光及不可见光均有较强吸收特性的黑色条带作为引导线,宽度为2.5cm。
在行驶过程中,单片机系统通过摄像头获取前方赛道的图像数据,同时通过测速传感器实时获取智能车的速度,采用路径搜索算法进行寻线判断和速度分析,然后做出控制决策,控制转向舵机和直流驱动电机的工作[1-4]。
智能车通过实时对自身运动速度及方向等进行调整来“沿”赛道快速行驶。
1 智能车系统方案作为能够自动识别路径的智能车,自动控制器是设计智能车的核心环节。
自动控制器是以飞思卡尔16位单片机MC9S12DG128(简称S12)为核心,配有传感器、电机、舵机、电池及相应的驱动电路,在保证智能车可靠运行前提下,电路设计应当尽量简洁紧凑,以减轻系统负载,提高智能车的灵活性。
信息处理与控制算法由运行在单片机中的控制软件完成。
因此自动控制器设计可以分为硬件电路设计和控制软件两部分,系统基本控制过程如图1所示。
图1 系统基本控制流程2系统硬件结构本设计中系统的硬件结构大致可以分为以下几个模块,如图2所示。
基于摄像头的智能车路径识别系统的设计
Computer Knowledge and Technology 电脑知识与技术人工智能及识别技术本栏目责任编辑:唐一东第6卷第28期(2010年10月)基于摄像头的智能车路径识别系统的设计黄娴1,张曦煌1,陆冬磊2(1.江南大学物联网工程学院,江苏无锡214122;2.无锡科技职业学院软服学院,江苏无锡214028)摘要:路径识别是智能车应用中的一项关键技术,直接决定了智能车行驶的质量。
本智能车采用飞思卡尔16位微控制器MC9S12DG128为核心控制单元,利用CCD 摄像头进行黑白道路图像采样以获取道路图像信息,通过二值化算法提取道路黑线,进而对小车的运行方向和速度进行控制。
实际测试表明,能较好地实现智能小车的路径识别功能。
关键词:智能车;CCD 摄像头;图像采样;路径识别中图分类号:TP391文献标识码:A 文章编号:1009-3044(2010)28-8083-03Design of Intelligent Vehicle Path Identification System based on CameraHUANG Xian 1,ZHANG Xi-huang 1,LU Dong-lei 2(1.School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China;2.School of Software and Service Outsourcing,Wuxi Professional College of Science and Technology,Wuxi 214028,China)Abstract:Path identification is a key technology in the application of intelligent vehicles.It directly determines the running quality of in -telligent vehicles.In this paper,we have developed an intelligent vehicle with advanced path identification algorithm.The embedded sys -tem is based on Freescale ’s 16-bit MCU,D cameras are used to collect image samples of monochrome road.Then the binary algorithm is introduced to extract road black-lines,through which the direction and speed of the intelligent vehicle is controlled.It is proved by experiments that our embedded system fulfills the path recognition task as an intelligent vehicle.Key words:intelligent vehicles;CCD cameras;image samples;path recognition随着半导体在汽车中的应用越来越普遍,汽车的电子化和智能化已成为行业发展的必然趋势。
基于摄像头的智能循迹小车控制算法设计
基于摄像头的智能循迹小车控制算法设计智能循迹小车的设计包括车的机械结构设计,硬件电路设计和控制算法设计三个方面。
文章采用模糊控制和PID算法进行电机和舵机的控制,完成智能循迹小车的控制算法设计。
该控制算法能够使得智能循迹小车在指定赛道内完成自动行驶的功能,达到设计要求。
标签:算法设计;智能循迹小车;行驶控制引言随着人工智能技术的发展,智能行车软件开发已成为计算机科学领域的研究热点之一,许多的实验平台和驾驶辅助系统已经开发出来。
自动驾驶的实现需要依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
基于摄像头的智能循迹小车的设计与控制软件研发是探索自动驾驶技术的一种有效途径,它以摄像头为路况监测传感器,完成在指定道路上的不同任务。
智能循迹小车的设计与控制软件研发主要包含三个基本方面[1-3]:机械结构的设计、硬件系统的搭建、软件系统的编写。
机械结构调整模仿汽车的机械结构,包括重心调整,前轮定位等。
硬件电路的设计遵从可靠性,稳定性和完整性,设计出一套符合要求的硬件电路。
软件设计通过道路识别算法和控制算法完成控制,同时以大量的赛道数据为基础保证了智能车的稳定性。
1 智能循迹小车的机械结构小车的机械结构主要由电机,底盘,舵机和摄像头四个部分构成。
在智能车底板与后驱动模块之间增加垫片可以降低底盘离地的间隙,为了保证智能车在弯道行驶时不发生侧滑,底盘离地的间隙应该是越小越好,但还要考虑车模在坡道处底盘不会碰到赛道,经过实验设置底盘离地间隙为8mm。
舵机采用前置悬置方式安装,使摆臂和舵机始终处于同一个水平面,有利于转向的灵活性,缩短舵机反应时间。
智能车CMOS摄像头的安装主要考虑了三个因素[4-5]:首先,保证摄像头的位置绝对居中且正对前方;其次,在安装高度上要尽量高,获取足够多的路况信息;最后,近瞻距离智能车20CM之内,用来保证智能车不偏离赛道。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
422009年第2期基于黑白摄像头的智能小车路径识别系统设计The Design of Intelligent Veh icle Path Recognition Based on Monochro m e Camera吴吟箫* 张 虹 王新生WU Yi n -x i a o Z HA NGH ong W A NG X in -s heng do:i 10.3969/.j issn .1672-9528.2009.02.015摘 要路径识别是汽车智能化发展的必然趋势。
在基于飞思卡尔单片机的智能车路径识别系统的设计中,首先采用基于黑白摄像头的图像采样模块获取路径图像信息;然后分别说明图像采集,图像预处理,黑线提取,路径判断部分的软件设计。
其中,在图像预处理中使用了二值化和中值滤波算法,并且在黑线提取中提出了改进插值算法。
实验表明,整个系统硬件设计简单,软件算法快速有效。
关键词路径识别 中值滤波 寻线算法Abstr a ct Inte lli gentize of vehic l e is a trend of cars .develop m ent in the future .P ath recogn ition i s o ne ofthe appli catio n d i rectio ns .Th is pa t h reco gn iti on syste m of i ntelli gent car uses i m age -sensor m odu l e based on ca m era to obta i n lane i m age i n f or m ati on .The whole syste m i s d i vi ded into f our parts :i m age acqu i s ition ,i m age pre-processi ng ,abstracting t he black li ne ,and road detec tion .The i m age pre-processi ng part uses the b i nary 2zatio n and t he m ed ian filter i ng to i m prove the i m age i n f or m ati on .Then by us i ng the i m proved a l gorith m,the resu lt of abstracting t he black li ne beco mes m ore prec i se .The ulti m ate a i m of the whole syste m i s to accurate l y abstract the b l ack g u i de li nes fro m the wh ite race way ,f oll o wi ng the road pa ra m e ters and co nditi ons i n fro nt ,m aki ng the car m ove prope rly .K ey word s R oad detecti on M ed i an filteri ng L i ne-tracking*哈尔滨工业大学(威海)信息科学与工程学院 264209基金项目:山东省自然科学基金(Y2007G20)1 引言智能化技术与汽车相结合产生的智能汽车将在未来工业生产和日常生活中扮演重要的角色,而路径识别则正是体现智能车智能水平的一个重要标志。
本文中智能小车路径识别系统基于摄像头和飞思卡尔16位微控制器MC9S12D G128B 组成,由摄像头采集图像有用信息送入单片机分析道路参数。
智能小车的运行环境[1]如图1所示。
其中,跑道黑线宽度为25mm;跑道最小曲率半径不小于500mm;跑道可以交叉,交叉角为90b 。
一个完整的路径识别系统不仅需要具备图像信号的采集功能,还要求完成图像信号的分析及处理算法。
因而,本系统分成四个模块:视频图像采集、图像预处理、黑线中心提取、路径判断。
2 视频图像采集视频图像的采集是基于M C9S12D G128单片机来实现的。
M C9S12D G128B 是F reesca le 开发的以CPU12内核为核心的单片机,采用5V 供电,总线速度25MH z ,8KBRA M,128KBFLAS H,具有丰富的I /O 模块和工业控制专用的通信模块[2]。
由于采用摄像头寻迹能大幅度提升赛车的前瞻距离,有利于赛车提高车速。
同时,赛道上只有黑白两色,只需提取探测画面的灰度信息就能识别出黑线信息,因而从减少成本和减轻单片机采样的负担两方面考虑,图像采集部分选用黑白摄像头。
摄像头输出的是PAL 制式的复合全电视信号,每秒输出25帧(每帧分为偶场和奇场)。
黑白视频图像信号通常由图像信号、消隐信号以及同步信号共同组成[3]。
图1 智能小车的跑道环境要能有效地采样摄像头视频信号,首先要提取出摄像头信号中的行同步脉冲,消隐脉冲和场同步脉冲。
L M1881视频同步信号分离芯片可从摄像头信号中提取信号的时序信息,如行同步脉冲、场同步脉冲和奇、偶场信息等,并将它们转换成TTL 电平直接输给单片机的I/O 口作控制信号之用,如图2。
这部分的硬件设计为:摄像头视频信号接入L M 1881的视频信号输入端,同时接入单片机其中一个A /D 口(这里选择PAD8口);L M 1881的行同步信号和奇偶场同步信号分别接入单片机的带中断的I/O 口PT0、PT1。
设置PT1口为输入捕捉下降沿,即采2009年第2期43集偶场信号。
当新的一场到来时,单片机首先采集到下降沿信息进入场中断。
在场中断处理程序中先将场中断关闭,然后启动行中断,并设置PT0口为输入捕捉上升沿。
当单片机捕捉到行同步信号后就进入行同步中断处理程序,开始采集图像信息。
本系统中使用的摄像头分辨率为352x288,但由于S12单片机的A /D 转换能力有限,并且赛道只有黑白两色,而本系统的目的只在于提取出黑线中心,所以不需要提取一行中所有的点。
基于以上两点原因,最终方案采集40x20分辨率图像。
通过试验证明,40x20分辨率的图像可以完整的反映出道路状况,采集效果如图3。
3 图像预处理图像预处理的目的是改善图像质量,在本系统中的目的是为单片机识别路径提供一幅更为清晰,更易判断的赛道图像。
3.1 二值化处理将图像导入m a tlab 进行分析,发现原始图像像素值均在0-255内,而白色区域像素值一般在160以上,黑色区域一般在70以下。
为了提取出黑线,检测像素值的跳变是最直观的方案,但是实际中一般黑白线边沿的像素值不是突然跳变的,而有一个过渡过程。
所以,将原始图像进行二值化处理不但有清晰边沿线的功能,还能方便后续路径识别部分算法的设计与处理。
二值化处理就是对于输入图像的各个像素,先确定某个亮度值,当像素的亮度超过该阈值时,则将对应输出图像的像素值设为1,否则为0,原理公式如下[4]:g (x ,y)=1f (x ,y )E t 0f (x ,y )<t其中,f (x ,y ),g (x ,y)分别为处理前、处理后的图像中处于(x ,y)位置上的某个像素的浓度值,t 为阈值。
图4为二值化后的效果,0为黑点,1为白点。
3.2 基于二值图像的中值滤波二值化后的赛道状况已经非常明了,但是仍有干扰存在,这样对赛道的识别及接下来的算法设计会造成一定的困难。
因而,选择对图像进行中值滤波。
该方法是一种局部平均的平滑技术,对脉冲干扰和椒盐噪声的抑制效果好,能有效保护图像的边缘[5]。
图4 二值化后的图像1x3窗口中值滤波是非常简单的一种去噪方法,是将某个像素点和相邻两个像素点的像素值按大小顺序排列,取出中间值作为该点的像素值。
这种方法能够有效的抑制随机噪声,并且计算量相比去噪常用的3x3模板要小得多。
减小计算量能够有效的提高单片机识别道路的速度,这一点对时间要求较高的实时处理是非常重要的。
为了说明此方案的适用性,随机在图像数组中加入噪声点,如图5。
为了使接下来的验证过程更为方便,设计中将实际图像用ma tlab 进行二值化,导出一个二维数组,在验证算法时不同的道路状况只需修改数组中的值即可。
图6中a 、b 分别为1x3模板和3x3模板中值滤波后的效果图。
从图中可以看出虽然3x3模板的去噪效果要稍好,但是1x3模板显然已经能去除绝大部分噪声点。
并且在实际赛道中噪声点的数量要比这里引入的噪声点少,即使有极少部分噪声点没有滤除,通过接下来提取黑线算法同样442009年第2期可以消除影响。
因而从去噪效果和计算量两方面来考虑,1x3模板中值滤波更具有优势。
4 黑线中心提取提取黑线中心部分是小车路径识别系统中最为重要的一个环节,关系到智能小车运行质量的好坏。
这里黑线中心提取方法为:先判断每行的第一个点是否为白点,如是白点则依次对白点进行计数(设计数为a ),当遇到连续黑点时则计数黑点个数(设计数为b),再次遇到白点时则退出该行计数,此时黑线中心所在列为a+b /2;如果第一个为黑点,且不是噪声点(即为连续的黑点),则直接对黑点计数(设计数为b),当遇到连续白点后则退出计数,这种情况下得到的黑线中心位于第b /2列。
最后将从一幅图像上得到的所有中心位置按行存入一个一维数组中。
但是不得不考虑两种比较特殊的情况,起始线和十字交叉线。
通过观察发现这两种情况下每行出现黑点的数量远远大于黑线的黑点数(黑线一般能采集到2-3个黑点),所以当采集到的黑点数超过正常值时,便判定这一行为特殊行,并赋予特殊标志位(这里将特殊行中心点标志为50,因为经过图像处理后图像变成38*20数组,标志为50能将特殊点和正常点很明显的区分开,也方便了下面的改进差值算法)。
由于规则要求小车能识别起始线,因而还需对特殊行进行分析。
图7为采到起始线的情况,可以看出起始线所在行具有多个跳变,考虑到车体偏离等情况,可以用白点跳变为黑点的次数(方案中选2或3)来判定是否为起始线,如果符合情况则标志出这一行。
则其他的特殊行均为十字交叉情况。
图7 采到起始线效果虽然在前面已经有去噪处理,但是偶尔还是会有干扰,这样提取出来的某些行黑线中心位置就发生了跳变。
同时,为了后续的控制模块得到准确的道路信息,需要对特殊行及跳变点进行插值处理,即赋予其前后两行的平均值作为黑线中心值。
但是考虑到会出现这样的复杂情况:连续两行出现跳变点或者特殊行的前后出现跳变点,这时如果简单的按上面的方法进行插值,会插入一个误差很大的中心点,使道路产生弯点。