运输类飞机PIO试飞方法研究
典型PIO预测准则及试飞应用

典型PIO预测准则及试飞应用驾驶员诱发振荡(PIO)是由于驾驶员飞机之间的不良的相互作用引起的一种持续的或不可控制的人-机耦合振荡。
文章建立了PIO预测分析所需的数学模型,其中受控對象数学模型采用快速傅立叶变换法求得,驾驶员模型采用修正Neal-Smith驾驶员模型。
分析研究了两种典型的PIO预测准则:Neal-Smith准则和带宽准则,并提供了相应的计算方法。
最后通过俯仰跟踪任务的仿真方法对计算结果进行了验证。
标签:驾驶员诱发振荡;准则评估;快速傅立叶变换;功率谱密度引言随着航空技术的迅猛发展,高增益、全权限电传飞控系统在先进战机与大型运输类飞机上得到广泛应用,飞机发生PIO的可能性越来越大,已经造成了多起飞行事故。
像国外F-18、F-22、A310、B777,国内的歼XX等先进飞机都曾出现过PIO问题。
这给飞机的设计和飞行安全构成了严重的威胁,也给工程技术人员提出了严峻的挑战。
因此,对PIO的预测分析显得尤为重要。
对于飞机纵向的PIO预测,本文采用快速傅立叶变换的方法,直接将时域试飞数据转为频域响应,由此建立受控对象数学模型。
驾驶员模型采用改进的Neal-Smith驾驶员模型。
预测准则选取目前常用的Neal-Smith准则和带宽准则。
最后以某一电传飞机为例,采用上述准则对该机进行了纵向PIO预测。
1 纵向驾驶员诱发振荡数学模型1.1 受控对象数学模型飞机设计阶段,一般利用风洞数据建立飞机本体的六自由度运动方程来建立受控对象的数学模型,在飞机试飞阶段,一般采用飞机长周期、短周期低阶拟配的方法建立受控对象的数学模型。
对于风洞数据或者拟配的方法,由于条件限制或者方法本省的影响,误差都比较大。
本文采用快速傅立叶变换的方法,直接将时域试飞数据转为频域响应,由此建立受控对象数学模型。
2 纵向驾驶员诱发振荡预测准则2.1 Neal-Smith准则该准则以闭环共振峰值和带宽处驾驶员的相位角(对应于驾驶员补偿)作为评定参数,评定飞机的飞行品质。
运输类飞机试飞空中应急离机试验及仿真

运输类飞机试飞空中应急离机试验及仿真摘要:运输类飞机作为民航运输的主力机型,在民航飞行领域起着至关重要的作用。
为了确保运输类飞机在应急情况下能够安全、有效地离开机场,进行空中应急离机试验及仿真是必不可少的。
本文首先介绍了空中应急离机试验及仿真的研究意义,然后详细介绍了该试验的基本原理和流程。
最后对试验结果进行了分析和总结,并提出了进一步研究的展望。
1. 研究意义运输类飞机是民航运输的重要工具,每天在全球范围内进行数千次的航班。
飞机事故仍然时有发生,其中一部分原因是在紧急情况下飞机未能有效离开机场。
进行空中应急离机试验及仿真对于提高运输类飞机的应急状况下的安全性至关重要。
2. 基本原理空中应急离机试验及仿真基于飞机的设计和性能参数,通过模拟不同紧急情况下的飞机离机操作,以评估飞机在应急情况下的逃生能力和安全性。
试验主要包括以下几个方面的内容:2.1 飞机离机方式的选择:根据紧急情况的不同,可以采用紧急滑道、救生滑梯、气垫救生滑梯等不同的离机方式。
选择合适的离机方式可以提高离机效率和乘客的安全性。
2.2 紧急离机流程的模拟:通过仿真软件和设备,模拟不同紧急情况下的飞机离机流程。
包括机组成员的应急指令传达、乘客的疏散指导、滑道和滑梯的使用等内容。
3. 试验流程空中应急离机试验及仿真的基本流程如下:3.1 参数设定:根据飞机的设计和性能参数,确定试验的基本条件。
包括飞机型号、紧急情况的类型和持续时间等。
3.2 试验准备:对试验进行充分的准备工作。
包括设备的检查和维护、试验区域的确保、试验人员的培训等。
3.3 试验执行:根据参数设定和试验准备,进行试验的实际执行。
包括紧急情况的模拟、飞机离机操作的模拟和记录等。
3.4 数据分析与总结:对试验结果进行分析和总结,评估飞机的应急离机能力和安全性。
包括离机时间、离机方式的选择和使用效果等方面的评估。
4. 结果分析与展望通过对空中应急离机试验及仿真的研究,可以得出以下结论:4.1 空中应急离机试验及仿真对于提高运输类飞机的应急状况下的安全性具有重要意义。
电传飞控系统起飞着陆时的PIO研究

电传飞控系统起飞着陆时的PIO研究
王敏文
【期刊名称】《飞行力学》
【年(卷),期】1996(14)2
【摘要】应用目前国外许多著名飞机公司及研究机构关于起飞着陆阶段的驾驶员诱发振荡(PIO)问题的预测方法和设计判据,对某数字电传飞控系统起飞着陆控制系统进行了纵向PIO研究。
经多种设计准则的迭代优化及PIO预测方法的评定,使所设计的系统性能处于最优区,无纵向PIO趋势。
【总页数】7页(P80-86)
【关键词】数字式;飞行控制系统;PIO;起飞;着陆
【作者】王敏文
【作者单位】
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.电传操纵飞机起飞着陆动态特性仿真研究 [J], 冯亚昌;陈刚;李沛琼
2.电传飞控系统需求捕获和确认技术研究 [J], 张松;房峰;李小光
3.电传飞控系统需求捕获和确认技术研究 [J], 张松;房峰;李小光
4.电传系统起飞着陆控制律设计 [J], 郭恩友
5.一种电传飞控系统测试性架构设计与评估技术研究 [J], 孙安全;关莉;刘正圆;张健
因版权原因,仅展示原文概要,查看原文内容请购买。
民用运输类飞机功能和可靠性试飞浅析

依据 对 C C A R 一 2 1 一 R 3 《 民用航 空 产 品 和零 部件 合格 审 定规 定 》§ 2 1 . 3 5飞行试 验 和 § 2 1 . 2 1 2特许 飞行 证分 类相 关规 定 的理 解 。 功 能 和可 靠 性 试 飞是 局方 试验 , 是 对 新 型 号 飞 机 进 行 的专 项 试 飞 , 是 在
飞应 取得 第一 类特 许 飞行证 。
0 引 言
飞行试 验 是 民用 飞机 取 得 型 号 合 格 证 的必 经
之路 , 功 能和可 靠性 试 飞是 一 项 重 要 的 局 方试 飞项 目, 是 为确 保航 空器 及 其 零 部 件 和 设 备 可 靠且 功能
正 常所 必须 进行 的飞行 试验 。
袁 冲 /Y u a n C h o n g
( 上 海 飞机设 计研 究 院 上 海 2 0 1 2 1 0 )
( S h a n g h a i A i r c r a f t D e s i g n a n d R e s e a r c h I n s t i t u t e , S h a n g h a i 2 0 1 2 1 0, C h i n a )
分 析 报道
An a l y s i s Re p od
民 用 运 输 类 飞 机 功 能 和 可 靠 性 试 飞 浅 析
Ana l y s i s o f Func t i o na l a nd Re l i a bi l i t y Fl i g ht Te s t of Ci v i l Tr a ns por t Ai r c r a f t
摘
要:
飞行试验是民用飞机取得型号合格证的必经之路 , 功能和可靠性试飞是一项重要 的局方试飞项 目. 是为确
超低空空投非线性PIO预测方法

超低空空投非线性PIO预测方法魏巍;孙秀霞;吕茂隆;王栋【摘要】在超低空空投下滑阶段,容易出现驾驶员诱发振荡即PIO(Pilot Induced Oscillation)问题,在此基础上分析了空投下滑拉平阶段产生PIO的主要致因,并建立含作动器速率限制的人机闭环系统,推导了闭环系统PIO发生的公式.基于同步和Neal-Smith驾驶员模型以及不同作动器速率饱和值运用描述函数法和GAP准则预测某型运输机PIO趋势.不同驾驶员模型PIO预测结果不同,同步驾驶员模型比Neal-Smith驾驶员模型仿真效果好,运用同步驾驶员模型进行预测,当驾驶员操纵增益绝对值大于11.5时,人机闭环系统失稳,容易产生PIO问题.仿真结果表明,若PIO是由驾驶员粗暴操纵所致,可通过减小操纵增益有效避免PIO的发生,在合理且允许范围内提高运输机舵机作动速率限制值可在一定程度避免PIO的发生.【期刊名称】《空军工程大学学报(自然科学版)》【年(卷),期】2018(019)006【总页数】6页(P27-32)【关键词】超低空空投;驾驶员诱发振荡;描述函数法;GAP准则【作者】魏巍;孙秀霞;吕茂隆;王栋【作者单位】空军工程大学装备管理与无人机工程学院,西安,710051;空军工程大学装备管理与无人机工程学院,西安,710051;空军工程大学装备管理与无人机工程学院,西安,710051;空军工程大学航空工程学院,西安,710038【正文语种】中文【中图分类】V212驾驶员诱发振荡即PIO(Pilot Induced Oscillation)问题是驾驶员试图控制飞机所做的努力而引起的持续的、不可控振荡[1-5]。
近年来,随着电传操纵系统在大型运输机上的广泛应用,非线性PIO现象急剧增加,已造成多起飞行事故,运输机执行空投任务的安全性受到严重威胁[2]。
特别是超低空空投下滑阶段,运输机逐渐进入地面效应影响区域,极易受低空风切变、大气紊流、传感器测量误差以及驾驶员精神高度紧张等一系列不确定因素影响[1-2]。
民机试飞员复杂风险科目培训方法探讨张燕
民机试飞员复杂风险科目培训方法探讨张燕发布时间:2021-08-27T00:25:30.741Z 来源:《中国科技人才》2021年第13期作者:张燕[导读] 民用飞机复杂风险科目飞行试验难度大、风险大,要求试飞员具备扎实的理论知识和熟练的飞行技巧。
中国商用飞机有限责任公司民用飞机试飞中心 201323摘要:民用飞机复杂风险科目飞行试验难度大、风险大,要求试飞员具备扎实的理论知识和熟练的飞行技巧。
基于此,本文结合试点项目,详细阐述了运输机试飞员综合风险培训的目的、内容、实施及效果评估。
通过实例总结出一些科学实用的训练方法,可供民航飞行员训练项目参考。
关键词:民机试飞员培训;复杂风险科目;培训方法引言:随着国内航空科技的不断进步,飞机的飞行性能和飞行质量也在不断提高,以确保跟上技术的发展。
因此,要求试飞员掌握当前飞行试验复杂风险课题分析的新技术和先进方法,而试飞员培训正是最直接、最有效的途径。
随着中国C919客机首飞的成功,交通运输行业对优秀试飞员的需求越来越大,完善复杂风险科目的试飞体系和民用飞机的飞行员培训机制迫在眉睫。
1、试飞员培训重要性试飞技术是试飞员的基本能力,是进行试飞的基本前提,试飞具有很大的风险。
试飞员需要具备一些特殊的驾驶技能,因此驾驶技术的训练往往是试飞员训练的重点,飞行员的理论知识和驾驶技能同等重要。
飞机远离地面后的行为是飞行员控制行为。
试飞员必须面对飞行中的所有问题,他们负责发现和处理这些问题。
所有这些都需要深厚的理论知识,这也可以帮助试飞员了解驾驶行为,因此,在复杂风险问题的训练中,既要注重试飞的训练,也要注重理论知识方面的教育培训[1]。
2、复杂风险科目培训目的试飞员复杂风险培训的主要任务是对试飞员进行相关试验科目理论、飞行前试验准备、飞行操作、飞行后数据分析和飞机性能评估等方面的培训。
通过严格的训练,试飞员可以提高理论水平和飞行技能,正确理解相关标准规范的要求,掌握试飞程序的特点,编写飞行检查单和基础数据分析的方法。
【doc】民用运输类飞机单发停车爬升试飞技术及研究

民用运输类飞机单发停车爬升试飞技术及研究12飞行试验2002年9月民用运输类飞机单发停车爬升试飞技术及研究黄文静吴密翠周晓飞(中国飞行试验研究院西安710089)摘要首先介绍了中国民用航空条例(CCAR一25)单发停车爬升的相关条款,并对民用运输类飞机型号合格审定执行该条款时可能遇到的问题进行了说明,随后着重分析了单发失效时飞机的动态特性.在此基础上,针对型号合格审定及航线飞行的不同特点,对单发停车爬升时飞行员所采取的操作要求提出了建议.对民用运输类飞机型号合格取证及航线飞行具有直接的参考意义.关键词民用运输类飞机单发停车爬升型号合格取证1引言对装有多台发动机的飞机而言,按CCAR一25相关条款要求,型号合格审定时必须进行单发停车爬升科目的试飞;对其航线飞行而言,飞行时亦可能出现单发停车的情况.与全发工作情况相比,单发失效时飞机的性能及动态特性会发生显着的变化:a.会使飞机的可用推力减少;b.会使飞机的阻力增加(失效发动机产生阻力);e.会使飞机产生偏转力矩.这些情况的发生.会给飞行员的操作带来一定的影响,处理不当,会直接危及飞行安全.因此,了解单发失效时飞机的动态特性,掌握试飞驾驶技术,对顺利完成型号合格审定及航线飞行的飞行安全是必不可少的.另外,民用运输类飞机型号合格审定时,在执行单发停车爬升条款的过程中可能遇到的问题有:a.爬升的时间问题;b.爬升的梯度问题;e.对条款要求的理解方面的问题.弄清这些问题对以后飞机进行合格取证工作具有重要意义.2条款要求CCAR一25(121)要求,进行单发停车爬升试飞的飞机必须完成以下构形的试验: a.起落架在放下位置的起飞;b.起落架在收起位置的起飞;e.起飞最后阶段;d.进场. 按照该条款的要求,运输类飞机合格审定飞行试验指南(AC25—7)及相关资料"对具体的试飞方法又进行了明确的规定.规定要求:a.单发停车爬升过程中,如果在机翼水平情况下全偏方向舵仍不能保持航向不变,应当在全偏方向舵情况下向工作发动机一侧倾斜一个小的角度来保持航向不变.b.在机翼近似保持水平情况下,至少要获得3min的稳定数据.e.进行正反航向的爬升.3可能遇到的问题及说明3.1起飞第二阶段爬升梯度较高的原因条例明确要求,起落架在收起位置的起飞(起飞第二阶段),在速度(为起飞安全速度)整鲞整塑差整墨宣圣旦堕:垦旦重垄壁主垦堇垦婴壅的定常爬升梯度,对于双发飞机不得小于2.4%,对于三发飞机不得小于2.7%,对于四发不得小于3.0%.显然,同起飞其它阶段相比,条例对起飞第二阶段爬升梯度的规定较高.其原因是:由于在起飞第二阶段飞机正处于飞越机场周围障碍物区,所以对该段的上升梯度要求比较高,飞机以机场跑道性能确定的最大起飞重量能不能安全飞越起飞航迹内的障碍物,主要用起飞第二阶段的上升梯度来检查.因此,单发停车的爬升性能主要检查飞机第二阶段的爬升梯度是否满足条例的要求.3.2试飞驾驶要求按照AC25—7的要求,单发停车爬升时,飞行员应尽力保持航向不变.为此,在操纵时首先蹬舵来保持航向,在全偏方向舵仍不能保持航向时,应压杆使飞机向工作发动机一侧倾斜一个小的坡度来保持航向不变.显然,这样进行爬升试验飞机必然带有侧滑,也有可能带有坡度,此时飞机的阻力较大,因此该科目的试飞风险也较大.但条例要求的目的是十分明确的,为了保证航线飞行的安全,必然要对型号合格取证的飞机的试验进行严格的要求和规定,这样试飞确定的单发停车爬升性能更具有典型性.就航线飞行的飞机而言,在爬升阶段出现单发失效的情况时,飞行员的操作与上面的方法有所不同,这点将在下面单发失效时飞机的动态特性一节的讨论中进行说明.3.3爬升时间的选定与正反航向爬升的问题在机翼近似保持水平情况下,至少要获得3min的稳定爬升数据.很明显,爬升的时间不能少于3min.其原因是:飞机在进行单发停车爬升试验时,一方面保持稳定爬升较困难(飞行速度较低,单发停车),另一方面很有可能遇到阵风影响.这两种情况必然会对试飞时的数据产生影响.为了尽可能取到有用的数据(状态稳定数据点),规定爬升的时间不能小于3min.进行正反航线的爬升主要是为了消除风梯度的影响,但如果能用惯性修正风梯度的影响,则可以不进行正反航向的爬升.4单发停车时飞机的动态特性以装有2台发动机的飞机为例,单发停车时,飞机的主要动态特性是:飞机向失效发动机一侧偏转和带坡度,飞行速度逐渐减小.假定飞行中右发失效(停车),此时飞机将向失效发动机一侧偏转,其偏转是由左发(工作发动机)推力产生的力矩与失效发动机产生的附加力矩引起的.此时飞机开始出现侧滑,并向失效发动机一侧滚转,飞行速度逐渐减小.4.1侧滑的形成由于飞机惯性力的作用,飞机力图保持原来的飞行方向,另一方面飞机在偏转力矩的作用下又要偏转,因而飞机产生左侧滑.4.2滚转的形成飞机左侧滑时,右半翼受到机身的阻挡,使得流过左半翼的气流速度比右半机翼的大;侧滑l4飞行试验2002年9月使左右机翼的后掠角产生差别.这两种情况均使飞机左机翼的升力大于右机翼的升力,以致出现向失效发动机一侧滚转的现象.4.3飞行速度下降的原因发动机失效,使得飞机的总推力减少,同时失效发动机产生附加阻力,使得飞机的阻力增加.因此,为了保持高度,飞行速度下降.5单发停车后飞机的操纵根据单发失效时飞机的动态特性可以看出,为了保持飞机的飞行,飞行员应相应地蹬舵,压杆,以保持飞机上的力及力矩的平衡.对于不大的侧滑角和倾斜角,横侧的力和力矩的平衡方程如下:Gf=z?+zp?(1)M:=M:?+M?』9(2)式中G为压杆后飞机重力的分力,z.为方向舵偏转所产生的侧力,zp?J9为侧滑形成的侧力,M为单发失效时不对称推力所产生的力矩.从(1),(2)式可以看出,方向舵偏转与飞机侧滑所产生的侧力由飞机因坡度所产生的重力的分力来平衡;不对称推力所产生的力矩M.由方向舵产生的操纵力矩及方向静稳定力矩来平衡.同时根据偏转力矩和飞行速度的大小,可以使飞机保持无侧滑带坡度和无坡度带侧滑的不对称推力平衡状态.a.无侧滑带坡度飞行.由(1),(2)式可以看出,为完成无侧滑带坡度飞行,制偏力矩完全靠蹬舵.为了平衡因蹬舵而产生的侧力,必须向工作发动机一侧压坡度,以重力的分力来平衡.采用此种飞行方法飞机阻力最小,因此航线飞行时,在爬升阶段如果出现单发停车情况,飞行员最好采取无侧滑带坡度飞行方法.b.带侧滑无坡度飞行.同样,由(1),(2)式可以看出,此种飞行飞行员要多蹬舵,使飞机向失效发动机一侧带侧滑.此时不对称推力所产生的力矩和侧滑所产生的方向静稳定力矩,由方向舵偏转所产生的力矩来平衡.侧滑产生的侧力平衡方向舵偏转所产生的侧力.由于侧滑,飞机阻力较大,因此,按照CCAR一25相关条款的要求,该方法适于飞机型号合格审定试飞时单发停车爬升采用.但如果全偏方向舵仍不能保持航向时,应压杆使飞机向工作发动机一侧倾斜一个小的坡度来保持航向不变.c.减少上升角为了保持发动机失效时的速度,应减少上升角,具体原因简述如下:在飞机爬升过程中(直线增速),飞机的运动方程经转换后,可得出爬升梯度的表达式=f(P—X)/mg】一(口/g)(3)式中习为爬升梯度;z为飞机质量;P为发动机推力;X为飞机阻力.(下转第19页)箜!鲞箜塑塑堕堡整望垦:叁王主笪壹佥星塑塑塞型塾煎造堡直盗婴壅!竺其一,在一次飞行中取较大的替代值;其二,在1000飞行小时飞续飞谱中取较小的替代值,这时,可以按照实测中大载的出现慨率(比如5次飞行出现1次)插人大载荷,同时去掉相应次数的小载荷.图1给出的是第2种替代方法,应当在飞续飞谱该任务其它起落中再去掉一些大小相同的小载荷.:;j一5结论本文通过分析处理实测数据,对中值随机载荷谱编制方法存在的问题进行了深入的研究和探讨,可得到以下结论:a.编制中值随机载荷谱时,需要对实测起落进3.O2.52.O1.51.OO.5O.OO1O2O3O4O5O6O7O图I某型机重心法向过载谱处理结果行当量使用寿命估算,从寿命估算的合理性看,建议采用考虑平均应力的三参数幂函数法;从编谱的角度看,可以使用单参数幂函数法.b.不同的寿命估算方法,不同的中值寿命选取原则得到的代表起落是有差异的,具体编谱时,可选取重复次数较多的起落为代表起落,或者将选中的代表起落全部选人,编谱时交替编人.c.代表起落中不包含实测最大值时,可用直接替换法或等损伤插入法将最大值插入代表起落中.上述结论及改进措施可直接用于我国今后飞机实测载荷谱的编制工作.参考文献1张福泽.飞机载荷谱编制的新方法研究.航空,1998,19(5):518~5242阎楚良,高镇同.飞机高置信度中值随机载荷谱的编制原理.航空,2000,21(2):I18~1233高镇同,蒋新同等.疲劳性能试验设计和数据处理——直升机金属材料疲劳性能可靠性手册.北京航空航天大学出版社,I9994张熙箴.××飞机实测重心载荷谱的编制.航空航天部第601研究所,19905蒋祖国.某型飞机载荷谱实测编谱方案.中国飞行试验研究院,2001,56汤阿妮.飞机实测载荷谱的编制.中国飞行试验研究院硕士学位论文,2002,2曲韭尊L(上接第14页)由(3)式可以看出,如果在起飞第二阶段出现单发失效时,因P减小,x 增大(失效发动机产生附加阻力),爬升梯度亦减少,如果此时飞机仍加速爬升,则加速度a>0,会使进一步减小,所以这时飞机应当以安全速度等速上升,以避免叩的过度减小,因此应减小上升角.6结论不论是型号合格审定还是航线飞行,单发停车爬升都存在着非常大的风险,需要试飞员保(下转第41页)笙鲞筮塑堕坚:£垦曼宣型量重鲨焦鏖墼兰雷达飞行时,测距的系统误差大于5111,对此有以下原因:a.试验机在远离和接近雷达飞行时的角闪烁不同,引起雷达测距变化较大.试验机远离雷达飞行时测量的是试验机的机尾,反射面积较大,且试验机匀速直线飞行,试验机姿态变化小,角闪烁较小,雷达接收的反射回波均为试验机的机尾回波,距离数据误差较小;而试验机返回接近雷达飞行时,雷达测量的是试验机的机头,反射面积较小,且试验机返航时降低高度,姿态发生变化,角闪烁变化较大,雷达存在测量到试验机的机身和机尾的情况,使雷达测距变化,影响系统误差的精度.b.机载GPS安装在试验机的机头,GPS设备测量的是试验机机头的飞行位置,而雷达在测量试验机时,当试验机远离雷达飞行时,雷达测量的是机尾某一位置,试验机返回接近雷达飞行时,雷达测量的是试验机机头某一位置.这两套设备测量的位置有一个变化的值,这种现象与精度计算的结果相吻合.这可在试验机上安装机载应答机消除.c.在俯仰角误差修正中,由于大盘不水平值,两轴不正交值,机电轴不匹配值是由人工标定,故存在一定的人工误差.在大气折射误差修正中,N,为雷达所在地区的大气折射率,我们采用大气折射率的平均值代替雷达所在西安地区的大气折射率,而这一值受天气,海拔,季节,一天内所测量的时间,云层影响较大.经过各方专家分析,认为PMRS精密测量雷达基本满足技术说明书要求.5结束语PMRS精密测量雷达完成了精度校飞,结果表明其精度已经达到设计要求,可以胜任各种航迹参数测量任务.相信在新世纪里,将会得到更广泛的应用.参考文献1袁永根编.单脉冲测量雷达培tJll教材.电子工业部第十四研究所,19942魏子卿,葛茂荣编着.GPS相对定位的数学模型.测绘出版社,19983斯科尔尼克M1主编.雷达手册【美】.国防工业出版社,1978(上接第l9页)持冷静,采取相应正确的方法加以处置,以避免事故的发生.特别是对型号合格取证,风险更大.因为此时为了满足条款要求,试飞员只能按条例的要求来操纵飞机,飞机必然带有侧滑,因而飞机阻力较大.因此为了试飞安全,建议先在空中进行单发停车爬升试验,只有当证明其爬升梯度足够时,再进行单发停车起飞试验.其次,在进行航线飞行时,一旦出现单发停车情况,飞行员应采取无侧滑带坡度飞行的方法,以减小飞机阻力;如果单发停车情况出现在起飞的第二阶段,则应减小上升角,以速度保持等速爬升.另外,出现单发停车也有可能发生在飞行的其它阶段,因而采取的措施也有差别,应按飞行员手册的有关规定执行.。
飞行仿真软件的PIO预测分析

飞行仿真软件的PIO预测分析摘要:PIO是飞行仿真软件分析的最重要的内容之一。
飞行员诱发振荡(PIO)是一种人-机闭环系统的不稳定的动态运动,通常由飞行员试图执行精确的飞行操纵任务所致。
目前,已经研发出了大量的PIO理论用于预测PIO的敏感性,本研究仅对3个PIO准则进行理论研究和预测命中率分析,即带宽/俯仰速率超调准则、Smith-Geddes 准则和Gibson相位速率准则。
关键词:飞行仿真软件;飞行员诱发振荡;预测准则0 引言飞行员诱发振荡( PIO)是飞行员、飞行控制系统和飞机之间在一些特定的条件下,由飞行员操纵或干扰激发而产生的一种复杂、不稳定的耦合振荡运动。
现代高增益飞机由于各种复杂飞控系统的广泛应用,增加了系统的模态数目和阶次,其高性能、高增益的特点相对于传统的飞机来说,更容易产生飞行员诱发振荡(PIO)。
飞行员诱发振荡往往来得很突然,严重的情况会导致灾难性的事故。
1 飞行员诱发振荡的预测准则现代飞机预测PIO的准则很多,比较常用的有Neal-Smith准则、带宽/俯仰速率超调、PIO相位滞后准则、俯仰PIO幅值准则、Smith-Geddes 准则、Gibson相位速率准则、回路分离参数法(简写成LSP)、增益裕量/相位裕量准则、进场最优姿态响应准则、航迹角峰值超调准则等等。
本文由于篇幅有限,仅对目前理论和验证比较成熟的、并且适用于Ⅰ类PIO的准则进行分析,包括带宽/俯仰速率超调准则、Smith-Geddes 准则、Gibson相位速率准则。
1.1 Smith-Geddes准则Smith-Geddes准则是由美空军研究机构开发。
它包括俯仰姿态角对杆力的斜率应在1~6rad/s的要求和临界频率处的俯仰角/杆力传递函数的相角小于-180°的要求。
据历史经验来说,Smith-Geddes准则在工程应用中相对保守,在飞行数据与理论预测的对比中发现,Smith-Geddes 准则预测到了大量的飞行中出现的PIO现象,但是同时也把一些飞行中并没有出现PIO的案例也被预测为PIO现象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运输类飞机PIO试飞方法研究Flight Test Method Research on Pilot Induced Oscillation of Transport Category Airplanes米毅刘庆灵/ Mi Yi Liu Qingling(中国商飞民用飞机试飞中心,上海200232,中国)(Flight test center of COMAC, Shanghai 200232, China)摘要:本文基于CCAR-25-R4《运输类飞机适航标准》要求,结合FAA咨询通告AC25-7C 《运输类飞机合格审定飞行试验指南》,简要叙述了驾驶员诱发振荡(PIO)的分类,以及运输类飞机PIO的合格审定试飞要求,分析了PIO试飞方法、试验点的选取原则、试飞评定准则、注意事项和风险规避措施等,可为民用飞机的PIO试飞提供参考。
关键词:PIO;开环操纵;闭环操纵;人机系统[Abstract]Based on the CCAR-25-R4 “Airworthiness Standards of Transport Category Airplanes”and FAA advisory AC25-7C “Flight Test Guide for Certification of Transport Category Airplanes”, this paper specified the requirements of airworthiness and the classification of PIO. This paper also gives analysis on the flight test method of PIO and principles of flight test points’ selection,the safety procedures during PIO flight test and evaluation criteria. It can provide guidance for the PIO flight test of the civil airplanes.[Key words] PIO; Open-loop operation; Closed-loop operation; Pilot-vehicle system 0引言在人机闭环操纵情况下,由于人机系统相互作用而导致的非期望的振荡或发散运动,这种现象被称为驾驶员诱发振荡[1][2]。
在民机设计安全性、经济性和舒适性要求中,安全性是首要和关键要求,而驾驶员诱发振荡(PIO)一直是关乎航空飞行器安全的重要因素之一。
历史数据表明,几乎所有部分或完全采用电传飞控系统的飞机在研制阶段都发生过PIO[3]。
特别是近年来航空技术的飞速发展及电传飞控系统、主动控制技术的应用,使得飞行控制系统越来越复杂。
在一定的使用和飞行条件下,由于操纵系统中的非线性、不被驾驶员感觉到的舵机速率、飞机响应的延迟、飞控模式的转换等各种因素,更易导致PIO事件。
CCAR25部§25.143(a)和(b)规定,在任何可能的使用条件下飞机必须可安全操纵和机动,而不需要超常的驾驶技能,也不会有超过飞机限制载荷系数的危险。
历史事件表明,在某些使用条件下,现代运输类飞机可能易受飞机-驾驶员耦合(APC,Aircraft Pilot Coupling)的影响而不满足该条款规定。
因此,飞机型号合格证申请人需要通过飞行试验等方式确定飞机遇到不利PIO趋势的可能性为最小[4]。
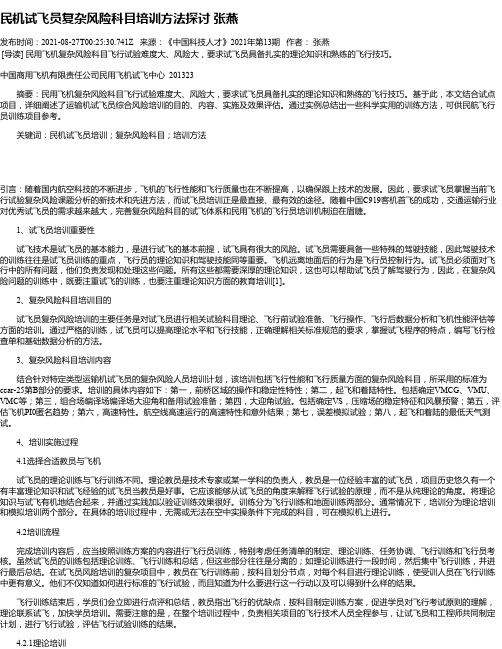
1典型PIO事件及PIO的分类国外早在上世纪就开展了PIO的研究。
图1为某型电传飞机发生PIO时的杆力-俯仰姿态历程曲线[5]。
如图所示,从35秒开始,由于驾驶员的杆输入和俯仰姿态出现延迟,驾驶员继续增加输入的幅值,从37秒开始,飞机的输入达到最大并和俯仰姿态呈反相,最终发展成严重PIO事件。
图1 某型电传飞机PIO事例为了更好地理解PIO事件,Duane McRuer根据PIO产生的原因将PIO事件分成了三类[1][6]:I型PIO为线性的人机系统振荡,此类PIO是由过大的时间延迟、各种滤波器产生的过大的相位滞后和不适当的控制/响应灵敏度等引起的。
II型PIO为准线性人机系统振荡,带有一定的非线性因子如速率或位置限制,此类PIO 存在非线性引起的附加延迟。
III型PIO为瞬态变化的非线性人机系统振荡,此类PIO事件高度非线性,难于辨识,很少发生但通常很严重,它是由飞行力学、飞机或驾驶员状态发生变化而引起的振荡。
经过多年的研究,国内外先后形成了比较成熟的PIO预测准则。
常用的I型PIO 预测准则主要有:带宽/俯仰速率超调准则、Neal-Smith准则、时域Neal-Smith准则、Gibson相位速率/增益准则等。
II型PIO预测准则主要有:带宽/俯仰速率超调准则、开环触发点OLOP准则、时域Neal-Smith准则等。
2适航条款要求及分析2.1适航条款[7]CCAR-25-R4在25.143(a)(b)中对飞机的操纵性和稳定性提出了如下要求:(a) 在下述过程中,飞机必须可以安全地操纵并可以安全地进行机动:(1) 起飞;(2) 爬升;(3) 平飞;(4) 下降;(5) 着陆。
(b) 必须能从一种飞行状态平稳地过渡到任何其它飞行状态,而不需要特殊的驾驶技巧、机敏或体力,并且在任何可能的使用条件下没有超过飞机限制载荷系数的危险,这些使用条件包括:(1) 临界发动机突然失效;(2) 对于三发或三发以上的飞机,当飞机处于航路、进场或着陆形态,临界发动机停车并已配平时,第二台临界发动机突然失效;和(3) 形态改变,包括打开或收起减速装置。
2.2条款分析§25.143(a)和(b)规定,在任何可能的使用条件下飞机必须可安全操纵和机动,而不需要超常的驾驶技能,也不会有超过飞机限制载荷系数的危险。
为表明对本条款的符合性,需在任何可能的使用条件下进行相应的操纵性和稳定性飞行试验。
条款没有明确规定速度范围和包线范围,而航线运行时,正常情况下飞行速度不会超过V MO/M MO或V FE,高度不会超过巡航高度。
根据航线运行需求和以往试飞经验,PIO评估任务设置应包括起飞安全速度V2或着陆参考速度V REF到V MO/M MO或V FE的速度包线,并考虑机动时的速度变化,一般留有10kts的速度安全余量。
为表明对本条款的符合性,PIO试飞可以分为两类:一类是PIO专项试飞,指专门针对PIO进行的试飞,其任务的设计应针对可能存在的任何PIO趋势;一类是非PIO专项试飞,包括所有与飞行品质或者飞行特性相关的闭环试飞,试飞时对此类试飞进行全程跟踪和分析。
CCAR25部未给出PIO具体评定指标的条款,其符合性主要通过驾驶员依据飞行品质评定方法(HQRM)与PIO评定准则的主观评定来实现。
3试飞方法AC25-7C提出,为了确保飞机达到§25.143(a)和(b)所要求的飞行品质,需通过试飞员执行高增益(宽带宽)闭环任务来对飞机进行评定,以确定遇到不利的PIO趋势的可能性为最小。
主要的高增益任务包括姿态截获、俯仰跟踪、纠偏着陆、突风颠倾和防撞规避。
但是,对于认为是太危险以至于不能在实际飞行中尝试的状态(即,超出使用飞行包线的某些飞行状态、在严重大气湍流中飞行、带某些失效状态的飞行等),可使用高保真度模拟器来执行闭环评定任务,前提是可证实模拟器对于所关注的飞行状态是有效的。
由于按§25.143(a)和(b)进行的飞行品质评定基本上是定性的,特别是PIO敏感性评定,因此在进行合格审定试飞时,这些高增益任务应至少由3名试飞员来完成。
对于所选定的所有任务,应使用渐进法(Build-up approach)。
在某些情况下,依据飞机的特性,首先考虑截获任务,然后进行精确跟踪任务,或采取粗略截获与精确跟踪任务组合的方法[4]。
3.1截获任务试飞方法截获任务倾向于评估粗略截获机动飞行的飞行品质,例如俯仰姿态截获、坡度倾斜角截获、航向截获、飞行航迹角截获、迎角截获和过载g截获等都可以用来评定不同方面的飞机响应。
这些捕获任务可得到飞机操纵品质的总体印象,但由于未涉及闭环精确跟踪,不能暴露出精确跟踪任务中可能出现的所有问题,因此不应将截获任务作为唯一的评定任务。
(1)俯仰截获在试验点(指定高度、速度)配平飞机水平飞行;从水平飞行快速截获5º(或10º,如果配平姿态角已超过5º)姿态角;然后快速操纵飞机进行俯仰姿态增量为±5º的姿态截获,持续此操纵3~5次;如飞机无异常,继续快速操纵飞机进行俯仰姿态增量为±10º的姿态截获,持续此操纵3~5次。
如图1所示。
具有较强能力的飞机能够以较大的俯仰偏移继续该程序。
图1 俯仰截获任务示意图(2) 滚转截获在试验点(指定高度、速度)配平飞机水平飞行;从15º坡度倾斜角开始,驾驶员使飞机快速滚转而捕获相反的15º坡度倾斜角(坡度倾斜角总变化量为30º);然后,驾驶员使飞机反向横滚并捕获原方向上的15°坡度倾斜角,持续此操纵3-5次;在试验点恢复飞机水平飞行,然后使用30º坡度倾斜角重复此程序,然后再用45º坡度倾斜角重复此程序,各坡度倾斜角下持续此操纵3-5次。
如图2所示。
左滚15° 右滚15° 左滚30°右滚30°图2 滚转截获任务示意图(3) 偏航截获航向捕获仅可用于评定偏航控制器(通常以5°或5°以下增量间隔使航向发生小的变化)。
在试验点(指定高度、速度)配平飞机水平飞行;驾驶员蹬脚蹬使飞机航向偏转5º,保持机翼水平,然后精确捕捉初始航向;然后向另一方向蹬脚蹬使飞机航向偏转-5º,保持机翼水平,再精确捕捉初始航向。
如图3所示。
左偏5°右偏5°初始航向φ0图3偏航截获任务示意图3.2 精密跟踪任务试飞方法精密跟踪任务用于评定在湍流大气条件下飞行时飞机的PIO 敏感性。
可采取俯仰跟踪任务和纠偏着陆任务进行试验。
(1) 俯仰跟踪任务[4]基于历史上发生的PIO 事件,俯仰跟踪任务(以大约2~5s 不同的时间间隔出现的偏离配平状态高达大约±4°的俯仰偏差)对评定PIO 敏感性是有效的。
如图4所示,在试验点(指定高度、速度)配平飞机水平飞行,进行偏离量小于±4º的俯仰姿态精密跟踪。
图4 俯仰跟踪任务在此任务中,俯仰和坡度倾斜角指令应是阶梯波形和斜坡波形的组合,且如果可能,试验时应使飞机保持试验高度±1000ft 和试验速度±10kn 范围内。