理论力学(14.7)--虚位移原理-思考题答案
第11章 虚位移原理—习题(1~17)
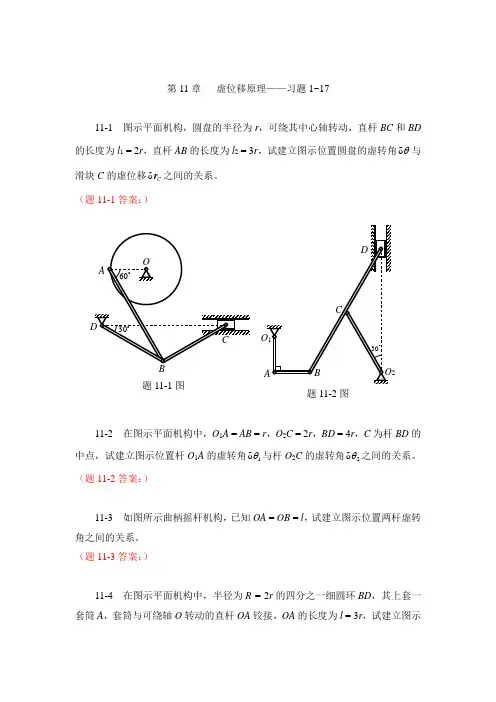
第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。
《理论力学》第十三章--虚位移试题及答案
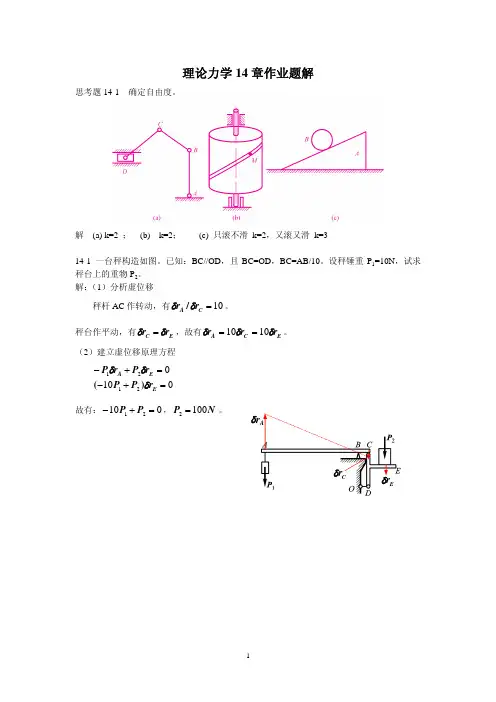
理论力学14章作业题解思考题14-1 确定自由度。
解 (a) k=2 ; (b) k=2; (c) 只滚不滑 k=2,又滚又滑 k=314-1 一台秤构造如图。
已知:BC//OD ,且BC=OD ,BC=AB/10。
设秤锤重P 1=10N ,试求秤台上的重物P 2。
解:(1)分析虚位移 秤杆AC 作转动,有10=C A r r d d /。
秤台作平动,有E C r r d d =,故有E C A r r r d d d 1010==。
(2)建立虚位移原理方程1002121=+-=+-E E A r P P r P r P d d d )(故有:01021=+-P P ,N P 1002=。
Cr d Er14-5 OA=l ,OC=R满足的条件。
解: (用虚位移原理求解)(1) 运动分析(虚位移关系分析)A 处虚位移关系用合成运动的理论分析。
A 为动点,OC 为动系。
r e A r r r r r r d d d +=f d d cos A e r r =另外:R r l r C e /d d = (2) 虚功方程fd f f d d d d cos /)cos /(cos /R l F F r R l F F R r l F r F r F r F C C C A C 21212121000==-=-=-14-9 已知:AC=BC=EC=GC=DE=DG=l ,荷载F 2。
求平衡时的F 1。
解 用解析法,1个自由度,选q 为广义坐标。
建立坐标,如图。
(1) 计算虚位移qdqd q qdq d q sin ,cos cos ,sin l y l y l x l x A A D D 2233-====(2) 计算力的投影 2211F F F F x y -=-= , (3) 建立虚位移原理方程qqdq q q d d sin cos )cos sin (230320212121F F l F l F x F y F D x A y ==×-×=+Oxy14-12 F=4kN, AO=OE=5m. 求D 解:(1) 接触D 处水平约束,代之约束力。
《理论力学》思考题及习题
《理论力学》思考题及习题宁夏大学机械工程学院技术基础部使用教材:理论力学(Ⅰ).哈尔滨工业大学理论力学教研室,第六版.北京:高等教育出版社.说明:以下各章的思考题及习题的页码和题号均以“哈工大”第六版《理论力学》教材为准。
静力学第一章静力学公理和物体的受力分析思考题:1.合矢与合力概念相同吗?2.几何法求合矢时,分矢与合矢怎样区别?3.力沿任意两个轴分解时的两个分力与力向该二轴的投影大小是否相同?4.二力平衡与作用力、反作用力的概念有什么不同?5.二力杆或二力构件的受力特点是什么?6.不计重力但作用有力偶的杆是二力杆吗?7.三力平衡汇交时怎样确定第三个力的作用线方向?8.画受力图的一般步骤是什么?在画物系中各个分离体的受力图时需要注意什么?9.P18思考题。
习题:P20-21:1-1 (a) (c) (d) (e) (g) (i) (j) (k); 1-2 (a) (d) (f)(i)(m) (o) 第二章平面汇交力系与平面力偶系思考题:1.汇交力系的几何法与解析法在应用上各有什么特点?2.解平衡问题时的一般步骤与注意事项?3.解物系问题时的注意事项?4.P33思考题。
5.力偶的特点与等效条件是什么?6.解力偶系平衡问题时的一般步骤与注意事项?习题:P36-40:2-1;2-3; 2-9; 2--12 (a) (c);2—14;2—17第三章平面任意力系思考题:1.力线平移定理的含义?2.用二矩式、三矩式求解问题时,附加什么条件才能保证物系平衡?3.求解平衡问题时,有哪些技巧可以使计算方便?4.P61思考题。
5.物系问题的解题思路?怎样选取研究对象?怎样列方程?6.销钉既受力又连接两个以上物体时的受力分析需掌握什么原则?7.怎样能做到一个方程求解一个未知数?8.节点法的本质是什么?9.截面法的本质是什么?10.怎样判断零杆?习题:P63-71:3-1;3-4;3-6;3-12(a);3-13;3-22;3-34第四章空间力系思考题:1.空间力系化简结果与平面力系化简结果的关系?2.什么力系有六个平衡方程?什么力系有三个平衡方程?什么力系有两个平衡方程?什么力系只有一个平衡方程?3.计算重心的常用方法。
虚位移原理习题解
δr
(2FB – 30 – 60•2.5 – 20•1.5 )δr = 0
FB = 105 kN
FAy
δr A
δr
(2) 求支座A的约束力。显然有FAx= 0,解除支 座A铅直方向的约束,代之以约束力FAy。解除 约束后,AC的瞬心为B,CD的瞬心为D,故得 如图所示的一组虚位移分布。于是有
(2FAy – 30 + 60•0.5 + 20•0.5 )δr = 0
FDxD FExE Fx 0
而弹簧的变形
FE θ FD
λ = b(x–a)/l
x
故有 FD = FE = kλ = kb(x–a)/l
代入虚功方程即可解得: x = a + (Fl2/ kb2)
如图所示结构,求支座A,B,D处的约束 反力.
FB δr B δr C 解: (1) 求支座B的约束力。支座B解除约束,代 之以约束力FB。注意到AC只能绕A转动,而CD 的瞬心为D,故有如图所示的一组虚位移分布。 由虚功原理可得
FAy = – 5 kN
FD
δr
δr D
(3) 求支座D的约束力。支座D解除约束,代之 以约束力FD。因CD只能绕C转动,故有如图所 示的一组虚位移。由虚位移原理可得
(2FD – 20)δr = 0
FD = 10 kN
理论力学
欢迎光临!
理论力学
虚位移原理
习题解答
图示曲柄压榨机 的销钉B上作用 有水平拉力F1,此 力位于平面ABC 内,作用线平分 ∠ABC,AB=BC, 各处摩擦及杆重 不计,求图示瞬 时对物体的压力
解: 由虚功原理有 F1xB F2yC 0
因为
xB l cos yC 2l sin
理论力学—14虚位移原理
由于 ,于是得 0
P 2 Qtg
例2 图示机构中,当曲柄OC绕轴摆动时,滑块A沿曲柄自 由滑动,从而带动杆AB在铅垂导槽K内移动。已知OC=a, OK=l,在C点垂直于曲柄作用一力Q,而在B点沿BA作用一力 P。求机构平衡时,力P与Q的关系。
rC
y
rA re a rr A
y A ltg
C
a
A
O
Q
y A
l cos
2
x C a cos
y C a sin
xC
a sin
l
K
B
x
y C a cos
主动力在坐标方向上的投影为
P
YA P
X C Q sin
Y C Q sin
y
r
O
l
x
2 2
xA yA r
2 2
B (xB , yB )
2 2
(xB xA ) ( yB y A ) l yB 0
几何约束方程的一般形式为
f r ( x1 , y 1 , z 1 , , x n , y n , z n ) 0
不仅能限制质点系的位置,而且能限制质点系中各质点的 速度的约束称为运动约束。
C
Q
O
l
K
B
x
P
解1:(几何法)以系统为 研究对象,受的主动力有P、 Q 。给系统一组虚位移如图。
r A re rr 由虚位移原理 F i ri 0 ,得
y
rA re a rr A
rC
理论力学第十四章 虚位移原理
虚位移原理
虚位移原理应用虚功的概念分析系统的平衡问题.
§14-1 约束、虚位移与虚功 一 约束及其分类 约束 限制质点或质点系运动的条件。 表示约束的数学方程
约束方程
1. 几何约束与运动约束 几何约束:约束方程中不含速度项的约束
实 例
x θ y l M(x,y) 单摆
约束:无重刚杆.
x2 + y2 = l 2 约束方程:
xC = hcotθ + BC
将虚位移间的关系代入虚功方程,得:
h M δθ − F δθ = 0 2 sin θ
求解可得:
h M= F 2 sin θ
FA
A δ rA
O
例: 图示曲柄连杆滑块机构, 曲柄OA的长度为r ,连杆AB 的长度为l=2r 。忽略各构件自 身重量及各处摩擦。求保持机 B FB 构在图示位置平衡的力FA、FB δ rA 间的关系。
∑F
i
Ni
• δ ri = 0
∑ F •δ r
i
=0
例:已知OA=r, 求系统在图示位 置平衡时,力偶 M与力F的关系。
A
θ = 900
θ
ϕ = 30 0
B
M
O
ϕ
F
解: (1)研究对象:机构整体
(2)受力分析:作虚功的力:M,F (3)求M与F关系: 给出虚位移:
δ rA A
− Mδθ + F ⋅ δrB = 0 建立虚位移 δθ 和 δ rB 间的关系: δ rA = δ rB δ rA = r ⋅ δθ 所以:δ rB = r ⋅ δθ
C A
θ
B G
δ rG
y
D
(2)受力分析:作虚功的力F、FB: E (3)虚功方程: F δ rG + FB δ rB = 0 建立虚位移间的关系( 坐标变分法)
理论力学2虚位移原理
7
2. 解析法 适用于完整、定常、双面约束
例:求A和B两点的虚位移
O
x
解:选1、2为系统的广义坐标,直角坐标原
点选在固定点O,则A、B坐标可表示为:
a
1 A(x1, y1)
x1 a sin1 y1 a cos1
x2 a sin1 b sin2 y2 a cos1 b cos2
y
2 b B(x2, y2)
0
m3 g
i 1
1. 分析主动力作用点的虚位移
2. 求主动力的虚功之和
14
rA
A
rC1
m1 g
M
O
rC2
m2g
rB
BF
解:
W 0
Fr M 0 m3 g B
rA rB rA rB L
FL M (FL M ) 0 0
LF M 0 M L F
15
例: 图示椭圆规机构,连杆A、B长为l,,杆重和摩擦力不计,
0
i 1
广义力及以广义力表示的质系平衡条件
k
Q jq j 0
j 1
广义力
任意点的虚位移与广义坐标虚位移的关系:
xi yi
zi W
xi
q1
yi
q1
zi
q1
n
i 1
q1
xi q2
q1
yi q2
q1
zi q2
r Fi
•
r ri
q2 q2 q2
L L L
n i 1
xi qk
r m2 g
解:根据虚位移原理
2
{Fixxi Fiyyi} 0
x1 l1 cos y1 l1 sin x2 l1 cos l2 cos y2 l1 sin l2 sin
同济大学理论力学 导学16虚位移原理
理论力学导学章虚位移原理第1616章第16章虚位移原理目录1. 内容提要... ... ... ... ... ... ... ... ... ... ... ... (3)2. 基本要求... ... ... ... ... ... ... ... ... ... ... ... (7)3. 典型例题... ... ... ... ... ... ... ... ... ... ... ... (8)4. 补充习题... ... ... ... ... ... ... ... ... ... ... ... (36)1.内容提要1)基本概念虚位移原理是用动力学的解题方法来研究静力学的平衡问题。
(1) 虚位移的概念及计算虚位移不是经过d t时间所发生的真实小位移,而是假想的、约束所允许的微小位移。
(2) 虚位移的计算方法大致可以分为以下两种:a. 虚速度法当时间“冻结”后,虚位移与速度具有相同的几何关系,所以可以利用运动学中研究速度的各种方法。
b. 解析法当质点系的广义坐标一旦确定,就将各质点的坐标表示为广义坐标的函数,然后通过对各质点坐标的变分,得到各质点的虚位移表示广义坐标的变更的关系式。
但必须注意,在应用解析法解题时,质点系中每一个质点都应处于一般位置。
0δ1=⋅∑=i ni i r F r r 0)δδδ(1=++∑=ni i iz i iy i ix z F y F x F (3)虚位移原理的应用几何形式对结构和机构都是适合的,但对机构,用解析法往往比较方便。
解析形式不能应用于处于特殊位置的机构。
应用虚位移原理解题时,对自由度为零的结构,根据题所要求的未知量,一般每次解除一个约束,使系统只有一个自由度,然后应用虚位移原理的几何形式(虚速度法)求解;对处于一般位置的机构,则可应用虚位移的解析形式求解。
虚位移原理的两种表达形式几何形式解析形式广义坐标形式的虚位移原理广义力以广义坐标表示的虚位移就是广义虚位移,与广义虚位移乘积后可以构成虚功的主动力就是广义力。
理论力学(机械工业出版社)第四章虚位移原理习题解答
习 题4-1 如图4-19所示,在曲柄式压榨机的销钉B 上作用水平力F ,此力位于平面ABC 内,作用线平分∠ABC 。
设AB =BC ,∠ABC =θ2,各处摩擦及杆重不计,试求物体所受的压力。
图4-190δ)90cos(δδN =--︒=∑C B F s F s F W θ)90cos(δ)902cos(δθθ-︒=︒-C B s s θθsin δ2sin δC B s s = 虚位移原理0δ)90cos(δδN =--︒=∑C B F s F s F W θ 0δsin δN =-C B s F s F θθθθθtan 2)2sin(sin sin δδ2N F F s s F F C B ===4-2 如图4-20所示,在压缩机的手轮上作用一力偶,其矩为M 。
手轮轴的两端各有螺距同为h ,但方向相反的螺纹。
螺纹上各套有一个螺母A 和B ,这两个螺母分别与长为l 的杆相铰接,四杆形成棱形框,如图所示,此棱形框的点D 固定不动,而点C 连接在压缩机的水平压板上。
试求当棱形框的顶角等于2f 时,压缩机对被压物体的压力。
图4-20ϕϕcos δ)290cos(δC A s s =-︒ C A s s δsin δ2=ϕ而 θϕδπ2c o s δP s A =ϕθϕθϕtan δπsin δcos π22δPP s C ==虚位移原理0δδδN =-=∑C F s F M W θ 0tan δπδN =⨯-ϕθθPF M ϕcot πN PMF =4-3 试求图4-21所示各式滑轮在平衡时F 的值,摩擦力及绳索质量不计。
图4-21虚位移原理0δδδ=+-=∑A B F s G s F W(a) A B s s δ2δ= 2G F =(b) A B s s δ8δ= 8G F = (c) A B s s δ6δ= 6G F =(d) A B s s δ5δ= 5G F =4-4 四铰连杆组成如图4-22所示的棱形ABCD ,受力如图,试求平衡时θ应等于多少?图4-22θθcos δ)290cos(δC B s s =-︒ C B s s δsin δ2=θ 虚位移原理0δcos δ2δ=-=∑C B F s G s F W θ0sin δ2cos δ2=⨯-θθB B s G s Fθtan =GF4-5 在图4-23所示机构中,曲柄OA 上作用一力偶矩为M 的力偶,滑块D 上作用一水平力F ,机构尺寸如图。
理论力学-虚位移原理
因此,在虚位移原理中,首先要研究加在质点系上的 各种约束,以及约束所许可的位移的普遍性质。
第六章 虚位移原理
§6-2 约束和约束方程
约束与约束方程 约束的类型
第六章 虚位移原理
§6-2 约束和约束方程
式中xA,yA和xB,yB分别为A,B两点的直角坐标。上述方程表明这四 个坐标并非都独立。可以消去其中的某三个,从而只剩下一个独立坐标,
这一坐标完全确定了此质点系的位置。
以后我们改称系统的位置为位形。
第六章 虚位移原理
§6-2 约束和约束方程
约束实例
曲面
图示质点A在曲面上运动,质点A的约束方程就是曲面 的曲面方程:
z
f (x, y, z) 0
A(x, y, z)
z
y
x
x
y
第六章 虚位移原理
§6-2 约束和约束方程
约束类型
三、约束的类型
按照约束对质点系运动限制的不同情况,可将约束分类如下:
1.完整约束和非完整约束
其约束方程的一般形式为
f j (x1, y1, z1; ...; xn , yn , zn; x1, y1, z1, ...; xn, yn, zn; t) 0
约束类型
第六章 虚位移原理
非完整约束
§6-2 约束和约束方程
约束类型
2.定常约束和非定常约束
● 如果约束方程中不含时间t,这种约束称为定常约束或稳 定约束。
定常约束一般形式为
f j (x1, y1, z1; ...; xn, yn, zn; x1, y1, z1,...; xn, yn, zn;) 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十四章 虚位移原理
答 案
14-1
(1)若认为B处虚位移正确,则A,C处虚位移有错:A处位移应垂直于
O1A向左上方,C处虚位移应垂直向下。
若认为C处虚位移正确,则B,A处虚位移有错:B处虚位移应反向,A处虚位移应垂直于O1A向右下方。
C处虚位移可沿力的作用线,A处虚位移不能沿力的作用线。
(2)三处虚位移均有错,此种情况下虚位移均不能沿力的作用线。
杆
AB,DE若运动应作定轴转动,B,D点的虚位移应垂直于杆AB,DE;杆BC,DE作平面运动,应按刚体平面运动的方法确定点C虚位移。
14-2
(1)可用几何法,虚速度法与坐标(解析)法;对此例几何法与虚速度法比坐标(解析)法简单,几何法与虚速度法难易程度相同。
(2)可用几何法,虚速度法与坐标(解析)法。
几何法与虚速度法相似,比较简单。
用坐标法也不难,但要注意δθ的正负号。
(3)同(2)
(4)用几何法或虚速度法比较简单,可以用坐标法,但比较难。
(5)同(4)
14-3
(1)不需要。
(2)需要。
内力投影,取矩之和为零,但内力作功之和可以不为零。
14-4
弹性力作功可用坐标法计算,也可用弹性力作功公式略去高阶小量计算;摩擦力在此虚位移中作正功。
14-5
在平面力系所在的刚体平面内建立一任意的平面直角坐标系,在此刚体平面内任选一点作为基点,写出此平面图形的运动方程。
设任一力 的作用点为(x i, y i),且把此坐标以平面图形运动方程表示,设此点产生虚位移,把力
投影到坐标轴上,且写出此点直角坐标的变分,用解析法形式的虚位移表达式,把力的投影与直角坐标变分代入,运算整理之后便可得。
也可以在平面力系所在的刚体平面内任选一点O(简化中心),把平面力系向此点简化得一主矢与主矩,把主矢以 表示,分别给刚体以虚位移
,由虚位移原理也可得平衡方程。