第10章 机器人控制技术力控与顺应控制 机器人原理及控制技术 教学课件
合集下载
《工业机器人控制》PPT课件

统。所以,工业机器人的控制,一般是一个计算机控 制系统,计算机软件担负着艰巨的任务。 仅仅是位置闭环是不够的,还要利用速度,甚至加速 度闭环。系统中还经常采用一些控制策略,比如使用 重力补偿、前馈、解耦、基于传感信息的控制和最优 PID控制等。
➢工业机器人还有一种特有的控制方式——示教再现 控制方式。
利用传感器检测出物体的位置和运动速度,并
且假设控制系统能利用这些信息,可按下述的控 制规律来计算驱动益器kp适和应当k该v,选施就择加可控于得制物到系体所统上希的望的增力:
的任意二阶系统的品质,实 现抑制干扰力,并使物体保
持在预定的位置上。
系统的运动方程为
不仅要求受控物体定位在某固定位置,而且要求
坐标系{c},坐标系{c}为约束坐标系,它总是处于 与某项具体任务有关的位置。
执行一项作业任务就可以用一组在{c}坐标系中 定义的约束条件来表示。
约束坐标系的选择
特点
➢取决与所执行的任务;
(1) {C}➢为一直般角应坐建标立系在,机器以人方手便爪描述作业操作;
与作业对象相接触的界面上。
(2) 视任务的不同,{C}可能在环境中固定 不动,也可能随手爪一起运动;
力之一。
无体意根因作论到此适义据以达,当,给多目往的这定么的往坐种的高 位 要 标相任的 置 根 变互 务精 , 据 换关 ,度 作 需 。系 经控 为 要 而是 常制 工 , 且首 要手 业 选 还要 求臂 机 择 因的 解, 器 不 工。 运若 人 同 业动不 来 的 机学能说基器正夹,准人问持那坐各题并就标关和操失系节逆作去,之问物了并间题,
惯性力、哥氏力的耦合作用以及重力负载的影响使问
题复杂化,所以使工业机器人控制问题也变得复杂。
➢即使一个简单的工业机器人也至少有3~5个自由度 相关。
➢工业机器人还有一种特有的控制方式——示教再现 控制方式。
利用传感器检测出物体的位置和运动速度,并
且假设控制系统能利用这些信息,可按下述的控 制规律来计算驱动益器kp适和应当k该v,选施就择加可控于得制物到系体所统上希的望的增力:
的任意二阶系统的品质,实 现抑制干扰力,并使物体保
持在预定的位置上。
系统的运动方程为
不仅要求受控物体定位在某固定位置,而且要求
坐标系{c},坐标系{c}为约束坐标系,它总是处于 与某项具体任务有关的位置。
执行一项作业任务就可以用一组在{c}坐标系中 定义的约束条件来表示。
约束坐标系的选择
特点
➢取决与所执行的任务;
(1) {C}➢为一直般角应坐建标立系在,机器以人方手便爪描述作业操作;
与作业对象相接触的界面上。
(2) 视任务的不同,{C}可能在环境中固定 不动,也可能随手爪一起运动;
力之一。
无体意根因作论到此适义据以达,当,给多目往的这定么的往坐种的高 位 要 标相任的 置 根 变互 务精 , 据 换关 ,度 作 需 。系 经控 为 要 而是 常制 工 , 且首 要手 业 选 还要 求臂 机 择 因的 解, 器 不 工。 运若 人 同 业动不 来 的 机学能说基器正夹,准人问持那坐各题并就标关和操失系节逆作去,之问物了并间题,
惯性力、哥氏力的耦合作用以及重力负载的影响使问
题复杂化,所以使工业机器人控制问题也变得复杂。
➢即使一个简单的工业机器人也至少有3~5个自由度 相关。
第10章 机器人控制技术力控与顺应控制 机器人原理及控制技术 教学课件
解运动位置的控制RMPC,解运动速度的控制RMRC,解运动加速度的控 制RMAC和解运动力的控制RMFC这四种控制方法是机器人运动控制的经典 之作。
现有的通用工业机器人一般只具有位置(姿态,速度)控制能力。如美 国的Unimation PUMA系列机器人,CINCINNAT1-T3系列机器人,Stanford 机 器 人 等 , 它 们 的 重 复 定 位 精 度 均 达 到 或 接 近 ±0.1mm 。 日 本 三 菱 公 司 的 Movemaster-EX机器人为±0.3mm,高精度的Adapt机器人和Delta机器人的重 复定位精度达到或接近±0.01mm。所有这些都具有关节位置和直角坐标位置 的控制,且具有专用的机器人语言(如VAL-Ⅱ)或通用的高级语言(如 BASIC)编程和示教再现能力。
2020/6/24
智能与控制工程研究所
4
(2)解运动速度的控制RMRC (Resolved Motion Rate Control) 1969年由D. E. Whitney提出。代表作是:
D E Whitney. Resolved Motion Rate Control of Manipulators and Human, Prostheses IEEE Trans. on Man-Mach. system. Vol. MMS-10, No.2, June 1969, pp.47-53 (3)解运动加速度的控制RMAC ( Resolved Motion Acceleration Control )
机器人的位置控制主要有直角坐标和关节坐标两种控制方式。
直角坐标位置控制:是对机器人末端执行器坐标在参考坐标中的位置和姿态的控 制。通常其空间位置主要由腰关节、肩关节和肘关节确定,而姿态(方向)由腕 关节的两个或三个自由度确定。通过解逆运动方程,求出对应直角坐标位姿的各 关节位移量,然后驱动伺服结构使末端执行器到达指定的目标位置和姿态。
现有的通用工业机器人一般只具有位置(姿态,速度)控制能力。如美 国的Unimation PUMA系列机器人,CINCINNAT1-T3系列机器人,Stanford 机 器 人 等 , 它 们 的 重 复 定 位 精 度 均 达 到 或 接 近 ±0.1mm 。 日 本 三 菱 公 司 的 Movemaster-EX机器人为±0.3mm,高精度的Adapt机器人和Delta机器人的重 复定位精度达到或接近±0.01mm。所有这些都具有关节位置和直角坐标位置 的控制,且具有专用的机器人语言(如VAL-Ⅱ)或通用的高级语言(如 BASIC)编程和示教再现能力。
2020/6/24
智能与控制工程研究所
4
(2)解运动速度的控制RMRC (Resolved Motion Rate Control) 1969年由D. E. Whitney提出。代表作是:
D E Whitney. Resolved Motion Rate Control of Manipulators and Human, Prostheses IEEE Trans. on Man-Mach. system. Vol. MMS-10, No.2, June 1969, pp.47-53 (3)解运动加速度的控制RMAC ( Resolved Motion Acceleration Control )
机器人的位置控制主要有直角坐标和关节坐标两种控制方式。
直角坐标位置控制:是对机器人末端执行器坐标在参考坐标中的位置和姿态的控 制。通常其空间位置主要由腰关节、肩关节和肘关节确定,而姿态(方向)由腕 关节的两个或三个自由度确定。通过解逆运动方程,求出对应直角坐标位姿的各 关节位移量,然后驱动伺服结构使末端执行器到达指定的目标位置和姿态。
第1章 机器人控制技术绪论 机器人原理及控制技术 教学课件
随着机器人技术的飞速发展和信息时代的到来,机器人所涵盖的内 容越来越丰富,机器人的定义也不断充实和创新。下面给出一些有 代表性的定义。
2020/10/3
智能与控制工程研究所
10
国际和国外相关组织的定义
国际标准化组织(ISO)的定义:机器人是一种自动的、位置可控的、 具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助可编 程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务。
机器人原理及控制技术
Principle and Control Techniques of Robot Manipulators 黄心汉
华中科技大学控制科学与工程系
章节安排
第一章 绪论 第三章 运动学方程 第五章 微分变换 第七章 控制 第九章 静态力
第二章 齐次变换 第四章 逆运动学方程 第六章 动力学 第八章 运动轨迹 第十章 力控与顺应控制
(6) 机器人语言;
(7) 装置与系统结构;
(8) 机器人智能等。
2020/10/3
智能与控制工程研究所
9
1.3 机器人的定义和分类
(Definition and Classifying for Robots)
1.3.1 机器人的定义 ( Definition of Robots )
机器人问世已有几十年,机器人的定义仍然仁者见仁,智者 见智,没有一个统一的意见。原因之一是机器人还在发展,新的机 型,新的功能不断涌现。同时由于机器人涉及到了人的概念,成为 一个难以回答的哲学问题。就像机器人一词最早诞生于科幻小说之 中一样,人们对机器人充满了幻想。也许正是由于机器人定义的模 糊,才给了人们充分的想象和创造空间。
两年后,美国“机床与铸造公司”(AMF)也生产了另一种可编程工业 机器人Versatran。
2020/10/3
智能与控制工程研究所
10
国际和国外相关组织的定义
国际标准化组织(ISO)的定义:机器人是一种自动的、位置可控的、 具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助可编 程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务。
机器人原理及控制技术
Principle and Control Techniques of Robot Manipulators 黄心汉
华中科技大学控制科学与工程系
章节安排
第一章 绪论 第三章 运动学方程 第五章 微分变换 第七章 控制 第九章 静态力
第二章 齐次变换 第四章 逆运动学方程 第六章 动力学 第八章 运动轨迹 第十章 力控与顺应控制
(6) 机器人语言;
(7) 装置与系统结构;
(8) 机器人智能等。
2020/10/3
智能与控制工程研究所
9
1.3 机器人的定义和分类
(Definition and Classifying for Robots)
1.3.1 机器人的定义 ( Definition of Robots )
机器人问世已有几十年,机器人的定义仍然仁者见仁,智者 见智,没有一个统一的意见。原因之一是机器人还在发展,新的机 型,新的功能不断涌现。同时由于机器人涉及到了人的概念,成为 一个难以回答的哲学问题。就像机器人一词最早诞生于科幻小说之 中一样,人们对机器人充满了幻想。也许正是由于机器人定义的模 糊,才给了人们充分的想象和创造空间。
两年后,美国“机床与铸造公司”(AMF)也生产了另一种可编程工业 机器人Versatran。
机器人控制技术课件讲课资料

*
机器人控制技术
机
1.1 引言
器 1.1.4 机器人控制系统
人
由于机器人的控制过程中涉及大量的坐标变换和插
及
补运算以及较低层的实时控制,所以,目前的机器人控
其
制系统在结构上大多数采用分层结构的微型计算机控制
控
系统,通常采用的是两级计算机伺服控制系统。
制
数学运算
原 人机对话 一级(上位机)通信 二级(下位机) 伺服
理
在控制过程中,工作人员可直接监视机器人的运动
状态,也可从显示器等输出装置上得到有关机器人运动
的信息。
*
机器人控制技术
机
1.1 引言
器 1.1.4 机器人控制系统
人
机器人控制系统的组成
及
1、硬件
其 控 制 原 理
人 机 对 话
控
制
器上
位
机
:
个
人
微
机型、计小算
机 数通学信运 数 据 存
算 储
下 位 机 : 单 片 机 、控运制动器伺 服 驱 动
检
测传
感器内 外 部 部
传 传
感 感
器 器
:自 :外
身运关动节状 部参环数境变
态 化
检 检
测 测
*
机器人控制技术
机
1.1 引言
器 1.1.4 机器人控制系统
人
机器人控制系统的组成
其
最后得出机器人各个关节的协调运动参数。这些参数经 过通信线路输出到伺服控制级作为各个关节伺服控制系
控
统的给定信号。关节驱动器将此信号D/A转换后驱动各 个关节产生协调运动,并通过传感器将各个关节的运动
机器人控制技术课件

机器人控制技术
机 1.1 引言 1.1.4 机器人控制系统 器 由于机器人的控制过程中涉及大量的坐标变换和插 人 补运算以及较低层的实时控制,所以,目前的机器人控 及 制系统在结构上大多数采用分层结构的微型计算机控制 其 系统,通常采用的是两级计算机伺服控制系统。 控 数学运算 制 伺服 人机对话 通信 原 驱动 理 数据存储
2018年11月26日7时4分
机器人控制技术
机 器 人 及 其 控 制 原 理
1.1 引言 1.1.3 机器人控制功能
2、运动控制功能 运动控制功能是指通过对机器人手部在空间的位 姿、速度、加速度等项的控制,使机器人的手部按照 作业的要求进行动作,最终完成给定的作业任务。 它与示教再现功能的区别:在示教再现控制中, 机器人手部的各项运动参数是由示教人员教给它的, 其精度取决于示教人员的熟练程度。而在运动控制中, 机器人手部的各项运动参数是由机器人的控制系统经 过运算得来的,且在工作人员不能示教的情况下,通 过编程指令仍然可以控制机器人完成给定的作业任务。 2018年11月26日7时4分
机器人控制技术
机 器 人 及 其 控 制 原 理
1.2
示教再现控制
1.2.1 示教方式 1.2.2 记忆过程
2018年11月26日7时4分
机器人控制技术
机 器 人 及 其 控 制 原 理
1.2 示教再现控制 1.2.1 示教方式
机器人示教的方式种类繁多,总的可以分为集 中示教方式和分离示教方式。 1、集中示教方式 将机器人手部在空间的位姿、速度、动作顺序 等参数同时进行示教的方式,示教一次即可生成关 节运动的伺服指令。 2、分离示教方式 将机器人手部在空间的位姿、速度、动作顺序 等参数分开单独进行示教的方式,一般需要示教多 次才可生成关节运动的伺服指令,但其效果要好于 集中示教方式。 2018年11月26日7时4分
机器人课件机器人控制ppt
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
如果给系统加上一个幅值为T的阶跃力矩 干扰,则系统的稳态误差为:
T lim sT(s)keTKm
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
5.1.3机器人示教编程方式
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
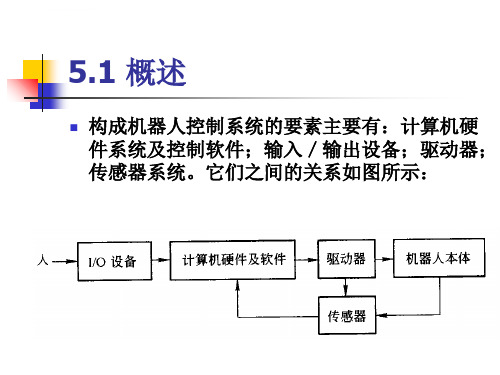
5.1 概述
构成机器人控制系统的要素主要有:计算机硬 件系统及控制软件;输入/输出设备;驱动器; 传感器系统。它们之间的关系如图所示:
简化后:
d (s)
Ke
Km JS ( f KmKv)
1 S
(s)
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
机器人控制方法课件

基于学习的决策控制
02 通过机器学习算法,让机器人学习如何根据感知信息
进行决策和控制,以实现更加智能化的控制。
基于混合的决策控制
03
结合基于规则和基于学习的方法,形成混合的决策控
制策略,以实现更高效和更稳息集中处理,并做出决策和控制指令,然后发送 给机器人执行。
02
机器人运动控制
运动控制的基本原理
01
02
03
运动学模型
描述机器人末端的位置和 姿态随时间的变化关系。
控制目标
通过给定关节角度或关节 速度,实现对机器人末端 位置和姿态的精确控制。
稳定性与性能指标
评估控制系统的稳定性和 性能,包括响应速度、超 调量等。
机器人的运动学模型
笛卡尔坐标系
描述机器人末端在空间中 的位置和姿态。
分布式控制
将感知信息分散处理,并在局部做出决策和控制指令,然后通过 通信网络进行协调和控制。
自适应控制
根据环境的变化,自适应地调整决策和控制策略,以保证机器人 的适应性和鲁棒性。
04
机器人智能控制
智能控制的基本原理
反馈原理
智能控制系统的核心是反馈,通过将输出信号与期望值进行比较, 调整系统的输入输出,以实现系统的自我调节和优化。
感知系统的技术要求
感知系统需要具备高精度、高稳定性、高实时性等特点,以满足机 器人控制的实际需求。
感知系统的校准和维护
为了保证感知系统的准确性,需要对各种传感器进行校准和维护, 以确保其正常工作。
基于感知的决策控制方法
基于规则的决策控制
01
根据预设的规则,对感知信息进行判断和处理,从而
实现对机器人的决策控制。
随着机器人技术的不断发展,机器人控制已经成为工业自动化、航空航天、医疗护理等领域的关键技术之一。
机器人的力控制

=J
T A
(q)hA
J
T A
(q)
K
q
(qd
q)
其中:hA 表示等效力向量,K q 表示关节空间等效力的刚度矩阵,
说明机械手在位姿控制作用下处于平衡点时,其特性与一个操作
空间中的广义弹簧单元相似。
顺应控制分为被动顺应控制和主动顺应控制。
10.5.2 顺应控制的分类:被动顺应控制
被动顺应控制系统:具有弹性类型动力学特性的机械系统。 被动顺应控制目标:设计柔性机械装置并安装在机械手的腕部,
本章内容
10.1 概述 10.2 力-力矩传感器 10.3 约束运动与约束坐标系 10.4 力控制规律的分解 10.5 间接力控制 10.6 直接力控制
10.1 概述
与外界环境无接触的作业,机器人通过路径规划、轨迹生成 和轨迹控制,即可实现良好的位置跟踪。
如果机器人运动过程中与环境接触,会出现什么问题?
机器人控制器
PC (main CPU)
Axis CPU
力传感器
位移数 据处理 SMB
Driv感器、间接力控制与直接力控制。
本章内容
10.1 概述 10.2 力-力矩传感器 10.3 约束运动与约束坐标系 10.4 力控制规律的分解 10.5 间接力控制 10.6 直接力控制
的关系,p 可由阻抗公式求得:M p Bp K p f
10.5.3 阻抗控制广义控制框图
阻抗控制广义控制框图
➢ 关于阻抗控制的讨论: a. 阻抗控制的参数选择。 b. 由于模型不确定和逆动力学计算中的近似,提出阻抗控制包容运动控 制环的方法,提高自由运动方向的运动准确性。 c. 阻抗控制下与环境接触的机械手等效结构图。
f ( fd kvf e f k pf e f ) fe
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直角坐标位置采用开环控制的主要原因是目前尚无有效准确获取( 检测 )末端执 行器位置和姿态的手段。但由于目前采用计算机求解逆运动方程的方法比较成熟, 所以控制精度还是很高的。如美国Unimation PUMA系列机器人 CINCINNATI-T3 系列机器人和Stanford机器人,其直角坐标位置重复定位精度达到±0.1mm 。日本 三菱公司的RM-101和 Movemaster-EX机器人重复定位精度为±0.3mm,而坐标 型高精度机器人Delta和Adapt机器人重复定位精度甚至达到±0.01mm 。(注意: 重复定位精度不是轨迹控制精度,后者精度要低得多)。
2020/9/25
智能与控制工程研究所
13
10.2 通用机器人控制器和控制结构 (The Structure of General Robot)
Xd
解逆运动程
Xd →θd
·· ·
θbi
θdi - θei +
关节位控制 PID
光电 码盘
机器人
X
操作手
图10-3 通用机器人控制结构
2020/9/25
智能与控制工程研究所
顺应控制又叫依从控制或柔顺控制,它是在机器人 的操作手受到外部环境约束的情况下,对机器人末端执 行器的位置和力的双重控制。顺应控制对机器人在复杂 环境中完成任务是很重要的,例如装配,铸件打毛刺, 旋转曲柄,开关带铰链的门或盒盖,拧螺钉等。
顺应控制可分为两种方式: 被动式 ( Passive Compliance ) 主动式 ( Active Compliance )
2020/9/25
智能与控制工程研究所
10
平移部件
旋转部件
· O
柔顺中心
(a) RCC
δx
·F
(b) 平移
图10-2 RCC工作原理
δθ
·M
(c) 旋转
2020/9/25
智能与控制工程研究所
11
主动刚度控制 ( Active Stiffness Control )
刚度控制是阻抗控制的一个特例,它是对机器人操作手静态力和位置的 双重控制。控制的目的是调整机器人操作手与外部环境接触时的伺服刚度, 以满足机器人顺应外部环境的能力。其代表作是:
D Silver. The little Robot System. AIM-73, Cambridge, MIT, Artificial Intelligence Lab., 1973
1976年R. P. Paul 和 B. Shimano进一步完善上述方法,采用腕 力传感器实现对机器人力的闭环控制。见下文:
2020/9/25
智能与控制工程研究所
12
顺应控制( Compliance control )
有关顺应控制的理论和方法,是由Mason在1981年提出的。 内容包括对外部环境的描述,自然约束和人为约束条件,力控 与位置控制等。其代表作是:
M T Mason. Compliance and Force control for Computer Controlled Manipulators. IEEE Trans. On SMC, Vol. SMC-11, No.6, June.1981. pp.418-432
R P Paul and B Shimano. Compliance and Control. American Automatic Control Council , proc. of the 1976 Joint Automatic Control Conference, 1976. pp.694-699
2020/9/25
智能与控制工程研究所
3
(4)解运动力的控制RMFC ( Resolved Motion Force Control )
1982年由吴清华(Wu C. H.)和R. P. Paul提出。其代表作为:
C H Wu and R P Paul. Resolved Motion Force Control of Robot Manipulators. IEEE Trans. on Sys. Man and Cybernetics, Vol. SMC-12,No.3, May/June, 控制工程研究所
9
被动柔顺 ( Passive Compliance )
被动式顺应控制是设计一种柔性机械装置,并把它安装在机械手的腕部,用来 提高机械手顺应外部环境的能力,通常称之为柔顺手腕(Compliance Wrist)。这种 装置的结构有很多种类型,比较成熟的典型结构是由美国麻省的The Charles Stark Draper Lab. 的D. E. Whitney领导的一个小组研制的一种称之为RCC(Remote Center Compliance)的无源机械装置,它是一种由铰链连杆和弹簧等弹性材料组成的具有 良好消振能力和一定柔顺的无源机械装置。该装置有一个特殊的运动学特性,即在 它的中心杆上有一个特殊的点,称为柔顺中心(Compliance Center),如图10-2所示。 若对柔顺中心施加力,则使中心杆产生平移运动,若把力矩施加到该点上,则产生 对该点的旋转运动,该点(柔顺中心)往往被选作为工作坐标的原点。
10.1 引言(Introduction)
工业机器人的控制可大致分为三种形式 位置控制(Position Control) 力控(Force Control) 顺应控制(Compliance)
2020/9/25
智能与控制工程研究所
2
10.1.1 位置控制( Position Control) Z
2020/9/25
智能与控制工程研究所
7
真正将力控用于多关节机器人上的是Whitney,他在1977年 将力传感器用在多关节机器人上,并用解运动速度的方法 (RMRC)推导出力反馈控制的向量表达式。而R.P.Paul(1972) 和Silver(1973)则分别用选择自由关节(free joints)的方法实现 对机器人力的开环控制。见下文: 见RMPC列举的文(1)
14
由图10-3可知,通用机器人是一个半闭环控制机构,即关节坐标采用闭环控制方 式,由光电码盘提供各关节角位移实际值的反馈信号θbi。直角坐标采用开环控制 方式,由直角坐标期望值Xd解逆运动方程,获得各关节位移的期望值θdi,作为各 关节控制器的参考输入,它与光电码盘检测的关节角位移θbi比较后获得关节角位 移的偏差θei,由偏差控制机器人操作手各关节伺服机构(通常采用PID方式),使 机械手末端执行器到达预定的位置和姿态。
位置控制是在预先指定的坐标系上,对 机器人末端执行器(end effector)的位置和 姿态(方向)的控制。如图10-1所示,末端 执行器的位置和姿态是在三维空间描述的,
end effector
O
X
Y
包括三个平移分量和三个旋转分量,它们分 别表示末端执行器坐标在参考坐标中的空间 位置和方向(姿态)。因此,必须给它指定
第十章 机器人的力控和顺应控制
ChapterⅩ Force Control and Compliance for Robot Manipulators
10.1 引言 10.2 通用机器人控制器和控制结构 10.3 通用机器人的动力学 10.4 阻抗控制 10.5 主动刚度控制 10.6 位置和力的混合控制
2020/9/25
智能与控制工程研究所
6
10.1.2 力控 ( Force control )
力控是对机器人末端执行器输出力或关节力矩的控制。较早 提出机器人力控的是Groome,他在1972年将力反馈控制用在方向 舵的驾驶系统中。参见下文:
R C T Groome. Force Feedback Steering of teleoperator System. Master’s Thesis, Massachusetts Institute of Technology (MIT), Aug. 1972
R P Paul and B Shimano. Compliance and Control. Proc. Joint Automatic control, Conf. Sam Francisco, IEEE, pp694-699, 1976
2020/9/25
智能与控制工程研究所
8
10.1.3 顺应控制 ( Compliance Control )
J K Salisbury. Active Stiffness Control of a Manipulator in Cartesian Coordinates. IEEE Conf. of Decision and Control. Nov. 1980. pp.95-106. Dept. of Computer Science, Stanford University.
Z Y
一个参考坐标,原则上这个参考坐标可以任 意设置,但为了规范化和简化计算,通常以
X
图10-1 机器人操作手
机器人的基坐标作为参考坐标。机器人的基坐标的设置也不尽相同,如日
本的Movemaster-Ex系列机器人,它们的基坐标都设置在腰关节上,而美 国的Stanford机器人和Unimation公司出产的PUM系列机器人则是以肩关节坐 标作为机器人的基坐标的。
解运动位置的控制RMPC,解运动速度的控制RMRC,解运动加速度的控 制RMAC和解运动力的控制RMFC这四种控制方法是机器人运动控制的经典 之作。
现有的通用工业机器人一般只具有位置(姿态,速度)控制能力。如美 国的Unimation PUMA系列机器人,CINCINNAT1-T3系列机器人,Stanford 机 器 人 等 , 它 们 的 重 复 定 位 精 度 均 达 到 或 接 近 ±0.1mm 。 日 本 三 菱 公 司 的 Movemaster-EX机器人为±0.3mm,高精度的Adapt机器人和Delta机器人的重 复定位精度达到或接近±0.01mm。所有这些都具有关节位置和直角坐标位置 的控制,且具有专用的机器人语言(如VAL-Ⅱ)或通用的高级语言(如 BASIC)编程和示教再现能力。
2020/9/25
智能与控制工程研究所
13
10.2 通用机器人控制器和控制结构 (The Structure of General Robot)
Xd
解逆运动程
Xd →θd
·· ·
θbi
θdi - θei +
关节位控制 PID
光电 码盘
机器人
X
操作手
图10-3 通用机器人控制结构
2020/9/25
智能与控制工程研究所
顺应控制又叫依从控制或柔顺控制,它是在机器人 的操作手受到外部环境约束的情况下,对机器人末端执 行器的位置和力的双重控制。顺应控制对机器人在复杂 环境中完成任务是很重要的,例如装配,铸件打毛刺, 旋转曲柄,开关带铰链的门或盒盖,拧螺钉等。
顺应控制可分为两种方式: 被动式 ( Passive Compliance ) 主动式 ( Active Compliance )
2020/9/25
智能与控制工程研究所
10
平移部件
旋转部件
· O
柔顺中心
(a) RCC
δx
·F
(b) 平移
图10-2 RCC工作原理
δθ
·M
(c) 旋转
2020/9/25
智能与控制工程研究所
11
主动刚度控制 ( Active Stiffness Control )
刚度控制是阻抗控制的一个特例,它是对机器人操作手静态力和位置的 双重控制。控制的目的是调整机器人操作手与外部环境接触时的伺服刚度, 以满足机器人顺应外部环境的能力。其代表作是:
D Silver. The little Robot System. AIM-73, Cambridge, MIT, Artificial Intelligence Lab., 1973
1976年R. P. Paul 和 B. Shimano进一步完善上述方法,采用腕 力传感器实现对机器人力的闭环控制。见下文:
2020/9/25
智能与控制工程研究所
12
顺应控制( Compliance control )
有关顺应控制的理论和方法,是由Mason在1981年提出的。 内容包括对外部环境的描述,自然约束和人为约束条件,力控 与位置控制等。其代表作是:
M T Mason. Compliance and Force control for Computer Controlled Manipulators. IEEE Trans. On SMC, Vol. SMC-11, No.6, June.1981. pp.418-432
R P Paul and B Shimano. Compliance and Control. American Automatic Control Council , proc. of the 1976 Joint Automatic Control Conference, 1976. pp.694-699
2020/9/25
智能与控制工程研究所
3
(4)解运动力的控制RMFC ( Resolved Motion Force Control )
1982年由吴清华(Wu C. H.)和R. P. Paul提出。其代表作为:
C H Wu and R P Paul. Resolved Motion Force Control of Robot Manipulators. IEEE Trans. on Sys. Man and Cybernetics, Vol. SMC-12,No.3, May/June, 控制工程研究所
9
被动柔顺 ( Passive Compliance )
被动式顺应控制是设计一种柔性机械装置,并把它安装在机械手的腕部,用来 提高机械手顺应外部环境的能力,通常称之为柔顺手腕(Compliance Wrist)。这种 装置的结构有很多种类型,比较成熟的典型结构是由美国麻省的The Charles Stark Draper Lab. 的D. E. Whitney领导的一个小组研制的一种称之为RCC(Remote Center Compliance)的无源机械装置,它是一种由铰链连杆和弹簧等弹性材料组成的具有 良好消振能力和一定柔顺的无源机械装置。该装置有一个特殊的运动学特性,即在 它的中心杆上有一个特殊的点,称为柔顺中心(Compliance Center),如图10-2所示。 若对柔顺中心施加力,则使中心杆产生平移运动,若把力矩施加到该点上,则产生 对该点的旋转运动,该点(柔顺中心)往往被选作为工作坐标的原点。
10.1 引言(Introduction)
工业机器人的控制可大致分为三种形式 位置控制(Position Control) 力控(Force Control) 顺应控制(Compliance)
2020/9/25
智能与控制工程研究所
2
10.1.1 位置控制( Position Control) Z
2020/9/25
智能与控制工程研究所
7
真正将力控用于多关节机器人上的是Whitney,他在1977年 将力传感器用在多关节机器人上,并用解运动速度的方法 (RMRC)推导出力反馈控制的向量表达式。而R.P.Paul(1972) 和Silver(1973)则分别用选择自由关节(free joints)的方法实现 对机器人力的开环控制。见下文: 见RMPC列举的文(1)
14
由图10-3可知,通用机器人是一个半闭环控制机构,即关节坐标采用闭环控制方 式,由光电码盘提供各关节角位移实际值的反馈信号θbi。直角坐标采用开环控制 方式,由直角坐标期望值Xd解逆运动方程,获得各关节位移的期望值θdi,作为各 关节控制器的参考输入,它与光电码盘检测的关节角位移θbi比较后获得关节角位 移的偏差θei,由偏差控制机器人操作手各关节伺服机构(通常采用PID方式),使 机械手末端执行器到达预定的位置和姿态。
位置控制是在预先指定的坐标系上,对 机器人末端执行器(end effector)的位置和 姿态(方向)的控制。如图10-1所示,末端 执行器的位置和姿态是在三维空间描述的,
end effector
O
X
Y
包括三个平移分量和三个旋转分量,它们分 别表示末端执行器坐标在参考坐标中的空间 位置和方向(姿态)。因此,必须给它指定
第十章 机器人的力控和顺应控制
ChapterⅩ Force Control and Compliance for Robot Manipulators
10.1 引言 10.2 通用机器人控制器和控制结构 10.3 通用机器人的动力学 10.4 阻抗控制 10.5 主动刚度控制 10.6 位置和力的混合控制
2020/9/25
智能与控制工程研究所
6
10.1.2 力控 ( Force control )
力控是对机器人末端执行器输出力或关节力矩的控制。较早 提出机器人力控的是Groome,他在1972年将力反馈控制用在方向 舵的驾驶系统中。参见下文:
R C T Groome. Force Feedback Steering of teleoperator System. Master’s Thesis, Massachusetts Institute of Technology (MIT), Aug. 1972
R P Paul and B Shimano. Compliance and Control. Proc. Joint Automatic control, Conf. Sam Francisco, IEEE, pp694-699, 1976
2020/9/25
智能与控制工程研究所
8
10.1.3 顺应控制 ( Compliance Control )
J K Salisbury. Active Stiffness Control of a Manipulator in Cartesian Coordinates. IEEE Conf. of Decision and Control. Nov. 1980. pp.95-106. Dept. of Computer Science, Stanford University.
Z Y
一个参考坐标,原则上这个参考坐标可以任 意设置,但为了规范化和简化计算,通常以
X
图10-1 机器人操作手
机器人的基坐标作为参考坐标。机器人的基坐标的设置也不尽相同,如日
本的Movemaster-Ex系列机器人,它们的基坐标都设置在腰关节上,而美 国的Stanford机器人和Unimation公司出产的PUM系列机器人则是以肩关节坐 标作为机器人的基坐标的。
解运动位置的控制RMPC,解运动速度的控制RMRC,解运动加速度的控 制RMAC和解运动力的控制RMFC这四种控制方法是机器人运动控制的经典 之作。
现有的通用工业机器人一般只具有位置(姿态,速度)控制能力。如美 国的Unimation PUMA系列机器人,CINCINNAT1-T3系列机器人,Stanford 机 器 人 等 , 它 们 的 重 复 定 位 精 度 均 达 到 或 接 近 ±0.1mm 。 日 本 三 菱 公 司 的 Movemaster-EX机器人为±0.3mm,高精度的Adapt机器人和Delta机器人的重 复定位精度达到或接近±0.01mm。所有这些都具有关节位置和直角坐标位置 的控制,且具有专用的机器人语言(如VAL-Ⅱ)或通用的高级语言(如 BASIC)编程和示教再现能力。