关于盾构机实时姿态测量和计算方法的研究
盾构姿态实时监控原理与方法

盾构姿态实时监控原理与方法盾构姿态实时监控是指在盾构施工过程中,通过各种传感器、监测仪器等设备对盾构机的姿态参数进行监测和记录,并将数据实时传输和显示,以确保盾构机在施工过程中的稳定性和安全性。
下面是盾构姿态实时监控的原理与方法的详细介绍:一、原理:盾构姿态实时监控主要基于传感器技术和数据传输技术。
通过安装在盾构机各个部位的传感器,收集和测量盾构机的姿态参数数据,并将数据通过数据传输技术传送给数据处理单元,经过数据处理和计算后,将结果实时显示在监控界面。
传感器技术主要包括加速度传感器、陀螺仪传感器、倾角传感器等,数据传输技术主要包括有线传输和无线传输两种。
二、方法:盾构姿态的实时监控主要包括以下几个方面的方法:1.传感器布置:根据盾构机的结构和施工需求,在盾构机的关键部位和重要部位安装各种传感器。
加速度传感器主要用于测量盾构机的加速度参数,包括垂直加速度和水平加速度;陀螺仪传感器主要用于测量盾构机的角速度参数;倾角传感器主要用于测量盾构机的倾角参数。
2.数据采集和处理:通过传感器采集到的姿态参数数据,经过模数转换、滤波处理以及数学计算等步骤,得到准确的姿态数据。
同时,基于数据采集系统还需开发一套数据处理软件,实现对数据的实时处理和分析。
一般情况下,数据采集和处理的过程可以通过相关的数学模型和算法实现。
3.数据传输和显示:通过数据传输技术将处理好的数据传输给监视人员。
传输方式可以采用有线传输或无线传输。
有线传输可以通过电缆等传输介质来实现;无线传输则可以通过无线电波、蓝牙、WIFI等技术来实现。
数据传输可采用本地传输或远程传输方式。
在数据显示方面,可以通过显示屏、计算机界面或移动终端等方式实时显示盾构姿态数据。
4.报警和保护:盾构姿态实时监控旨在保证盾构机的安全和稳定,因此,在姿态超出设定范围时,系统应能及时发出警报并采取相应的保护措施。
报警方式可以通过声音、光源等形式进行,保护措施可以通过停机、调整姿态等方式实现。
盾构机姿态参数的测量及计算方法研究
量Байду номын сангаас标 。
则平面 M123 方程为 :
xnx + yny + znz + D = 0
(6)
将点 1 的坐标 ( x1 , y1 , z1) 代入上式得 :
D = - ( xnx1 + yny1 + znz1)
(7)
由点到平面的距离公式得 :
在自动导向系统的计算机显示屏幕上 ,一般以 坡度 (mm/ m) 表示盾构机姿态角度 。掘进过程对盾 构机姿态的控制有比较严格的要求 ,一般地 ,纵摆角 ≤10 mm/ m ,横摆角 ≤10 mm/ m ,扭转角 ≤20 mm/ m。
3 盾构姿态的常用测量方法
3. 1 人工测量
主要通过在盾体上安装坡度板 ,在盾壳上焊接测 量用的重锤线 ,并对准重锤 ,根据重锤在坡度板上指出 的刻度 ,即可直接读出盾构的即时坡度和扭转角[2] 。
两者为激光全站仪导向 ,后者为陀螺仪导向 。陀螺 仪 GYRO 系统可靠性方面有待提高 。激光导向系统 能实时反映盾构机的位置偏差和姿态 ,操作简单 ,导 向精度高 。以下简要介绍德国 VMT 公司的 SLS - T 自动导向系统 。
SLS - T 自动导向系统主要由 Leica 激光经纬仪 TCA1103 、后视棱镜 、带光栅的棱镜标靶 ELS、黄色电 源盒 、微型计算机 、SLS - T 自动导向系统软件等硬 、 软件组成 。
·14 ·
位置变动 ,使所测量的盾构机姿态产生很大误差 ,甚 至导致隧道超限 ,为此必须采用不同的测量方法对 盾构机姿态进行复核 。
目前 ,我国盾构机主要依靠进口 ,近年来进口的 用于地铁隧道施工的盾构机一般都配备有自动导向 系统 ,但如何对盾构姿态进行复核测量还无简单 、快 捷 、准确的方法 。为克服传统人工测量法精度低 、测 量占用时间多的缺点 ,本文提出一种新的盾构姿态 测量及计算方法 。
浅谈盾构机姿态的控制方法

浅谈盾构机姿态的控制方法
一、简介
盾构机为沉管全封闭式施工机械,具有自动化程度高、施工质量可控、施工速度快和管片拼装精度高等优势,深受广大施工企业的青睐,用于水
利工程、市政工程、油气工程等城市基础设施的管线施工,不仅可以大大
减少施工难度,节省施工时间,还可以提高施工质量和提升施工效率。
但是,控制盾构机姿态是盾构钻机施工中的关键,盾构机控制姿态不准确,
既会影响施工质量,又会严重延误施工进度,甚至出现施工安全事故,因此,控制盾构机姿态是施工质量的重要保障。
1、建立坐标系:首先,应建立一个轨道工程坐标系,可以通过在地
形上标准点测量来建立。
2、采用传感器测量方法:在盾头前设置激光传感器,可以利用它来
测量盾头的垂直位置,并定时发送信号,通过接收系统转换后可以获得盾
头的三维坐标信息,从而可以准确控制盾头的姿态。
3、采用水平仪测量法:在盾头前方设置水平仪,可以实时水平测量,通过控制盾头的角度,从而准确控制盾头的姿态。
4、采用视觉控制方法:同样,可以在盾头前方设置一台摄像头,通
过视觉控制,可以准确控制盾头的姿态。
下面来说明如何用棱镜法来计算盾构机的姿态和位置
下面来说明如何用棱镜法来计算盾构机的姿态和位置。
我们利用洞内地下导线控制点,只要测出18个参考点中的任意三个点(最好取左、中、右三个点)的实际三维坐标,就可以计算盾构机的姿态。
对于以盾构机轴线为坐标系的局部坐标来说,无论盾构机如何旋转和倾斜,这些参考点与盾构机的盾首中心和盾尾中心的空间距离是不会变的,他们始终保持一定的值,这些值我们可以从它的局部坐标计算出来。
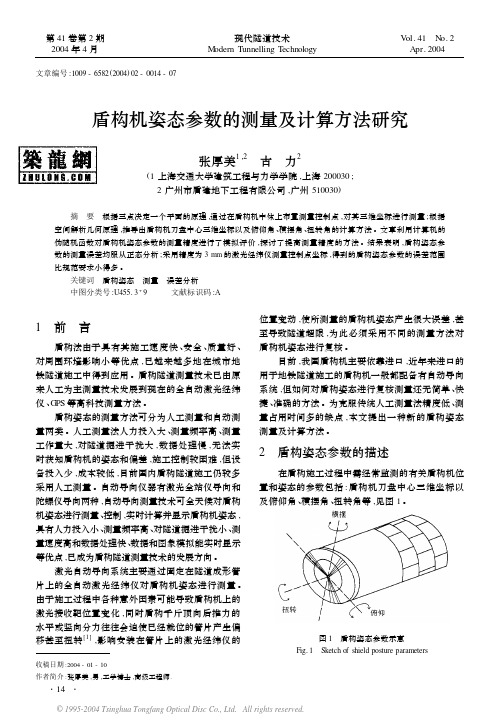
假设我们已经测出左,中,右(3,8,15号)三个参考点的实际三维坐标,分别为(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),并设未知量为盾首中心的实际三维坐标(X首,Y首,Z首)和盾尾中心的实际三维坐标(X 尾,Y尾,Z尾),从图2中可以看出,在以盾构机轴线构成局部坐标系中,盾首中心为坐标原点,坐标为(0,0,0),盾尾中心坐标为(-4 34,0,0)。
从表1中也可以看出各参考点在局部坐标系的坐标值。
三个方程三个未知量,采用专业软件解算方程组。
我们测出某一里程盾构机上三个参数点(3,8,15)的实际三维坐标分别为:从以上数据可以得知,在与对应里程上盾首中心和盾尾中心设计的三维坐标比较后,就可以得出盾构机轴线与设计轴线的左右偏差值和上下偏差值,以及盾构机的坡度,这就是盾构机的姿态。
把计算得出的盾构机姿态与自动导向系统在计算机屏幕上显示的姿态作比较,据我们的实践经验,只要两者的差值不大于10mm,就可以认为自动导向系统是正确的。
5 结束语在南京地铁一号线中,张府园~三山街区间隧道分为上行线和下行线两条互相平行的线路,即往返两条隧道。
在这两个区间段的实际应用中,曾多次采用棱镜法检核盾构机姿态,两者的偏差值较差均不大于1 0mm,证明了该方法在检核自动导向系统的正确性是可靠有效的。
在贯通测量中,由于采用了以上一系列的方法和措施,以及先进的自动导向系统指导推进,上行线于2002年9月准确贯通,经甲方检测,平面贯通误差为18mm,高程贯通误差为2mm;下行线于12月准确贯通,平面贯通误差为20mm,高程贯通误差为3mm,均能很好的满足贯通误差不大于50mm的要求。
盾构机初始姿态测量方法及适用性分析

盾构机初始姿态测量方法及适用性分析发表时间:2020-08-07T06:08:44.219Z 来源:《建筑学研究前沿》2020年10期作者:雷显高[导读] 俯仰角是指掘进机轴线和水平面的垂直夹角。
当X轴的正半轴位于过坐标原点的水平面之上时,俯仰角为正,反之为负。
其表征盾构机在里程处上所处的坡度,主要影响隧道的掘进坡度。
广东华隧建设集团股份有限公司 510000摘要:盾构法施工的关键是依据测量控制点精确确定盾构机的掘进方向和位置,确保盾构机按设计线路掘进,而盾构机初始姿态测定是盾构施工的关键节点,直接影响到隧道的施工质量和贯通。
盾构机初始姿态测定方法有水平标尺法、坐标推算法、侧边法等,考虑到盾构机经多次拆装后存在一定的拼装错缝,且局部盾壳有较大变形,一般认为采用侧边法测得的盾构机初始姿态比较可靠。
关键词:城市轨道交通;地铁隧道;盾构施工;初始姿态;测量方法引言地铁盾构施工中的一个重要步骤就是依据地下导线点精确确定盾构机掘进的方向和位置,确保盾构机按照设计的线路进行掘进。
盾构机初始姿态测定即盾构机的零位测量是盾构隧道施工测量中最关键的一步,直接影响到隧道贯通精度。
盾构机初始姿态测定的方法很多,有水平标尺法、侧边法和测支撑环法等。
1盾构机姿态概述盾构机是在地下空间穿梭的运动体,因此盾构机姿态参数包括刀盘中心三维坐标、偏航角、俯仰角及滚动角等。
(1)偏航角是指掘进机轴线和设计隧道中心线之间的水平夹角,其表征的是盾构机在水平方向的方位,主要影响隧道在水平方向的转变方向。
(2)俯仰角是指掘进机轴线和水平面的垂直夹角。
当X轴的正半轴位于过坐标原点的水平面之上时,俯仰角为正,反之为负。
其表征盾构机在里程处上所处的坡度,主要影响隧道的掘进坡度。
(3)滚动角是指掘进机盾体相比于零位测量时发生的转动角度。
根据盾构机姿态参数定义可知,盾构机姿态准确性将直接影响成型隧道质量。
因此,盾构机姿态的准确性是盾构施工测量的一个十分关键的环节。
地铁盾构施工中盾构机姿态定位测量分析

地铁盾构施工中盾构机姿态定位测量分析摘要:随着城市化进程的不断加快,许多城市的发展都离不开地铁工程的建设,在具体的地铁工程建设施工中,为了更好的满足盾构施工的需求,就要加强对各种定位测量技术的利用,明显的将研究测量工作中存在的误差缩小,保证数据测量的准确性,科学的首先对地面的控制,保证各种定位测量的有效性。
本文主要分析地铁盾构施工中盾构机姿态定位测量的有效性,从而为后续的地铁施工提供有效保证。
关键词:地铁盾构施工;盾构姿态;定位测量在实际的地铁工程建设实施中,为了保证地铁工程建设的有效性,使城市交通通行更加便利,就要加强对盾构机姿态的定位测量,保证在进行地铁盾构施工的时候,盾构设计符合相关规定的要求,保证盾构掘进的贯通,将测量工作中存在的各种误差减小[1]。
盾构工程施工建设期间,不可避免的会受到各种不良因素的干扰,从而导致盾构施工的参数和支护设备发生改变。
所以在实际进行施工的时候,要注意周围土体的扰动,最好在进行盾构穿越之前可以进行试验段模拟,从而保证施工的参数得到优化。
一、盾构机自动导向系统功效和构成盾构机在使用的过程中,为了实现良好的定位测量效果,就要重视对自动导向系统的利用,因为自动导向系统是盾构机中的重要组成部分,其核心部分为SLS-T 系统,主要的功能实现依赖于发射激光束角度和距离测量等;而电子激光系统作为智能传感器中的一种,主要组成为激光靶板和靶板,该系统利用对于自动导向功能的实现具有积极的作用,因为该系统能够在利用中接收全站仪激光束,将不同角度的射点进行检测。
系统倾斜仪主要就是针对性的对旋转和倾斜角度进行测量,偏转角度主要的作用发挥依赖于电子激光系统和激光入射角。
电子激光系统固定在盾构机系统中,一旦将其安装完成以后,就可以科学的对系统的位置进行确定,保证轴向参数和设备之间的关系。
同时在自动制导系统中,一个核心利用的软件就是SLS-T 系统,该系统的利用能够科学精准的实现对各种数据信息的接收,实现对软件的额精准定位,将信息以图形和数据等形态进行展现。
盾构机姿态参数测量技术研究

维普资讯
第2 6卷第 4期
V0 .6 No4 I2 .
企 业 技 术 开 发
TECHNOLOGI CAL DEVEL0PMENT OF ENTERPRI SE
20 0 7年 4月
Ap .0 7 r 0 2
盾构机 姿 态参数 测量技 术研 究
a l a d o so a l . Th p pe c ri d u a i l t d v l a i n o nge n t r in nge e a r a re o t smu a e e a u to t me s r t e a u e h pr c so o t e e iin f h
t hil po t e a a e e s he s ed sur p r m t r
L U Ga g I n
( r m a o m n c t o n i e r n o p n , h n a l a 6 B r a r u , e j n 0 1 0 C i a T a w y C m u ia in E g n e ig C m a y C ia R iw y 1 u e u G o p B i i g 1 1 0 ,h n)
s i l p s r a a tr b u i g h p e d r n o h e d o t e p r me e s y sn t e s u o a d m f n t n i t e o u e , a d ic s e h a — u u ci w t h c mp tr n d s u s d t e p o h
有关盾构机姿态人工测量及计算方法的论证

盾构机姿态人工测量计算方法论坛作者:李懂懂【摘要】本文针对地铁隧道盾构法施工中盾构机的姿态位置,提出盾构机姿态的人工测量原理,简明地介绍了地铁建设中盾构及姿态人工测量过程,并着重对盾构机姿态定位中的测量工作做了深入细致的研究,阐述了盾构机自动导向系统姿态定位测量的原理和方法,以及如何使用人工测量的方法来检核自动导向系统的准确性,分析了盾构机姿态定位检测的情况。
确保盾构机按照设计的线路进行掘进。
【关键词】城市地铁;盾构机姿态;人工测量原理1 、概述随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于±50mm),必须研究每一步盾构机姿态人工测量的方法。
2 、人工测量原理简介盾构机姿态的人工测量原理是利用安装在管片顶部小吊篮上采用强制归心的全站仪来测量盾构机上自设的三个人工标靶,通过专业的盾构掘进姿态解算程序来计算盾构机的掘进姿态,及时指导盾构机纠偏,确保盾构机按照设计的线路进行掘进。
3、盾构机姿态位置的检测方法和计算由于盾构机在隧道内推进过程中有各项因素都可能影响ENZAN系统的稳定性,这时候我们就需要通过其他方法来检测盾构机姿态是否在设计轴线内。
间隔时间取决于隧道的具体情况,在有严重的光折射效应的隧道中,每次检查之间的间隔时间应该比较短。
这主要是由于空气温度差别很大的效应。
论述折射及其效应的题目有大量的文献资料,此处不再详述。
在隧道测量时必须始终考虑这一效应。
低估这个问题可能会引起严重的困难,尤其在长隧道中。
我们采用在盾构机上焊接钢筋头来对盾构机的姿态进行检查,在盾构机1、2、3号棱镜边焊接一根5cm左右长度的钢筋头,并在钢筋头上凿好十字丝,在盾构始发前应多次测设钢筋头与盾构机三维轴线坐标,他们相对于盾构机的轴线有固定的参数关系,即它们与盾构机的轴线构成局部坐标系。
测量时只需测出三个钢筋头位置,通过始发前建立的局部坐标系,就可以计算出盾构机的姿态与位置参数与ENZAN系统上显示的实时姿态的差别,推断实时姿态是否准确。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编订:__________________
审核:__________________
单位:__________________
关于盾构机实时姿态测量和计算方法的研究Deploy The Objectives, Requirements And Methods To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level.
Word格式 / 完整 / 可编辑
文件编号:KG-AO-5971-19 关于盾构机实时姿态测量和计算方
法的研究
使用备注:本文档可用在日常工作场景,通过对目的、要求、方式、方法、进度等进行具体的部署,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。
下载后就可自由编辑。
随着社会经济的发展和城市建设的加快,城市规模不断扩大,人口不断增多,交通越来越来拥挤。
一些地方的城市建设者为了治理交通拥堵,分散交通压力。
不断寻求解决方式,修建地铁成为了一些城市建设者的主要的选择方式。
但是在修建地铁的过程中,工程量非常大,施工难度相对较高。
在地铁施工过程中,采用盾构技术,与传统的施工技术相比,有着许多优势,逐渐成为地铁修建过程中的主要施工方法。
本文将主要分析盾构姿态的测量的原理和方法,探究盾构姿态的测量的精度分析。
盾构机姿态简介
盾构施工过程就像生活中的目标运动,先进行重心平移,然后在运动的过程中偏航,最后进行自身重
心的滚动。
因此,在盾构施工过程中,需要监测的数据是盾构机位置和姿态的参数。
主要是三维坐标和滚动角、偏航角和俯仰角。
盾构机姿态的控制对整个工程施工意义重大,它决定着施工的质量和隧道推进方向的精度。
一旦控制不好,容易导致隧道偏差过大和盾尾间隙过小而相碰。
盾构机液压系统
液压系统是盾构机的核心部分,盾构机的工作机构主要是由液压系统驱动完成,对盾构机系统的运行起着很大的作用。
盾构机的液压系统主要包括两大系统,一是推进系统,二是主动铰接系统。
2.1.推进系统
盾构机的主要工作系统是推进系统,它主要是通过油缸作用于成型观片,以此来实现盾构前进。
推进系统的动力单元是一台80L/min旋转柱塞泵,执行元件是24个油缸,调节和控制部分包括方向的控制、油缸电磁阀的选择、安全阀、节流阀等。
盾构机工作时的最大工作压力是35MPa,液压泵最大推进流量是
80L/min,推进油缸是240/180-1950(mm)。
2.1.1.推力计算
盾构机共有推进油缸24个,总推力是这24个油缸的推力之和,那么在液压系统的最大推力F最大-24×P×Sn中,P表示油缸的最大压强,S表示活塞面积,因此,F最大-24×35×106Pa×3.14×0.122㎡≈37981t
2.1.2.推进速度计算
盾构机的最大推进速度就是油缸的最大伸长速度,S-1/T,T-V/S1,在这个公式中,S表示最大推进速度,T表示伸长1mm所需要的时间,V表示伸长1mm需要的油液体积,S1为推进流量,S为74mm/min。
因此,当前的盾构机最大推力是1200kN,掘进速度是40—65mm/min,推进系统的设计完全符合要求。
2.2.铰接系统
盾构机的调向主要使用铰接系统,通过调向,使得盾构机形成一定角度,便于控制。
铰接系统的动力单元是一台25L/min的高压泵,执行元件是16个
270/160-190(mm)的油缸。
铰接系统的最大压力是35MPa,液压泵的最大流量是25L/min,铰接油缸是270/160-190(mm),铰接力F最大-P×S≈2003kN,其中,P是最大压强,S是活塞面积,盾构机自身重量是300t,钢和土体之间的摩擦系数是0.5,前盾和土体的摩擦力是Fˊ-G×ц-150t ≈1500kN,G表示前盾自重,ц表示静摩擦系数。
盾构机实时姿态的计算方法
3.1.测量原理和方法
盾构机姿态测量的原理: 盾构机前体位置上要选择两个控制点,这两个控制点不能在同一条直线上,在控制点上还要安上反射片。
在测量过程中,为了保证测量的便捷性,应当尽量保证这些控制点和盾尾通视,同时要保证在测量过程中,控制点上的反射片不能脱落或者是移动位置。
为了保证盾构机上的控制点、刀盘中心和初始姿态的相对关系,在盾构机上已经安装好的前基准点、后基准点以及刀盘上方应当各布置一个临时观测点,并且要在盾构机的前体位置上设置
一些其它观测点。
盾构机工作前,应当对盾构机上的所有控制点以及临时观测点进行初始坐标测量,这样就可以测量出盾构机的具体姿态和位置信息。
3.2.分析姿态测量的精度
盾构体的姿态测量的观测值是由两棱镜的坐标和滚动角、俯仰角组成,坐标的误差是由全站仪的精度决定的;而滚动角、俯仰角是通过双轴倾斜仪进行测量的,它的误差是由倾斜仪的精度决定的。
全站仪是一种智能仪器,它主要由三部分组成,分别是电子经纬仪、光电测距仪和数据处理系统。
两棱镜安装位置的确定是很困难的,因为在安装时没有参照物,很难求得偏航角。
因此,在安装两棱镜的时候,往往采取的是坐标转换的办法,通过坐标转换,就可以定位两棱镜的相对位置。
盾构机的测量过程以及计算过程必然会产生误差,因此,需要对误差进行评估。
3.3.提高精度测量的办法
3.3.1.使用高精度测量仪器
如果使用测量精度为3mm的仪器,处于刀盘中心的Z坐标的误差平均值会达到5.8mm,这个数值大约是仪器误差的两倍;如果使用精度为5mm的仪器,误差平均值会达到34mm。
所以,如果能够使用高精度测量仪器,将会有效的减少盾构机的测量误差。
3.3.2.采用多点复核测量
采用多点符合测量就需要在盾构机上的控制点至少要在5个以上,这样既可以为符合测量做准备,也可以防止施工的时候被意外损坏的现象。
3.3.3.测量控制点的布置要合理
测量结果在很大程度上受控制点的位置影响,因此,在一般情况下,控制点应当布置在盾构机上的比较稳固的位置上,这样在一定程度上就能保证盾构机在施工过程中不会被意外碰到,并且能够保证和盾尾相通视。
除此之外,三个控制点的位置应当尽量使他们呈三角形,并且最大程度上保证他们的边最长。
由于盾构技术具有自动化程度高、施工速度快、对周围的环境影响小等优势,施工过程中能够获得良
好的综合效益,盾构技术现在已经发展成地铁施工过程中主要采用的办法。
盾构技术的姿态控制对整个施工过程影响非常大,它控制着整个施工过程的质量和精度。
此外,应当建立维护液压系统的保护方案,掘进参数的设定要合理,避免长时间负荷运行,以降低设备运行风险。
请在这里输入公司或组织的名字
Enter The Name Of The Company Or Organization Here。