摄影测量实验报告(空间后方交会—前方交会)
摄影测量解析基础(后方交会前方交会)

06
结果输出
输出目标点的三维坐标数据。
前方交会方法的优缺点分析
优点 不需要地面控制点,可以在未知环境中进行测量。
可以快速获取大范围的三维空间信息。
前方交会方法的优缺点分析
• 适用于动态目标和快速测量场景。
前方交会方法的优缺点分析
01
缺点
02
03
04
对光照条件敏感,光照变化会 影响测量精度。
对摄影图像的质量要求较高, 需要清晰、分辨率高的图像。
随着科技的不断发展,摄影测量技术也在不断进步和完善,其在各个领域的应用 也日益广泛和深入。
摄影测量的历史与发展
01
摄影测量起源于19世纪中叶,当时人 们开始使用胶片相机进行地形测量。 随着技术的发展,数字相机逐渐取代 了胶片相机,使得摄影测量更加便捷 和高效。
02
近年来,随着计算机技术和人工智能 的飞速发展,摄影测量技术也取得了 重大突破。例如,无人机技术的兴起 使得摄影测量更加灵活、快速和安全 ;计算机视觉和深度学习技术的应用 则提高了影像解析的自动化和智能化 水平。
在复杂地形和遮挡严重的环境 中,前方交会方法可能会失效
。
05 实际应用案例
Hale Waihona Puke 后方交会方法应用案例总结词
通过已知的摄影站和地面控制点,解算出摄影中心和地面点的空间坐标。
详细描述
后方交会方法常用于地图更新、地籍测量和城市三维建模等领域。例如,在城市三维建模中,利用后方交会方法 可以快速准确地获取建筑物表面的空间坐标,为构建真实感强的城市三维模型提供数据支持。
图像获取
获取至少两幅不同角度的摄影图像。
01
02
像片处理
对图像进行预处理,包括图像校正、去噪等 操作。
摄影测量实习总结报告5篇
摄影测量实习总结报告5篇摄影测量实习总结报告(1)一、实习目的摄影测量与遥感实习是摄影测量学和遥感技术相应用的综合实习课。
本课程的任务是通过实习掌握摄影测量的原理、影像处理方法、成图方法,掌握遥感的信息获取、图像处理、分类判读及制图的方法和作业程序。
从而更系统地掌握摄影测量与遥感技术。
通过实习使我们更熟练地掌握摄影测量及遥感的原理,信息获取的途径,数字处理系统和应用处理方法。
进一步巩固和深化理论知识,理论与实践相结合。
培育我们的应用能力和创新能力、工作仔细、实事求是、吃苦耐劳、团结协作的精神,为以后从事生产实践工作打下坚实的理论与实践相结合的综合素质基础。
二、实习内容1) 遥感影像图制作;2) 相片控制测量;3) 航空摄影测量相对立体观察与两侧;4) 航片调绘、遥感图像属性调查;5) 相片及卫片的判读及调绘6) 调绘片的内页整饰7) 撰写实习报告,提交成果。
三、实习设备与资料1) 摄影测量与遥感书本上的理论知识。
2) 通过电脑查找有关这门学科的实践应用及其它相关知识等。
3) 电脑上相关的摄影测量的图片信息资料及判读方法。
4) 现有的实习报告模板及大学城空间里的相关教学资料。
四、实习时间与地点时间:__年6月19日——__年6月26日。
地点:学校图书馆、教室、寝室及搜集摄影测量与遥感这门学科的资料等相关地方。
五、实习过程5.1摄影测量与遥感学的进展情景摄影测量与遥感是从摄影影像和其他非接触传感器系统获取所讨论物体,主要是地球及其环境的可靠信息,并对其进行记录、量测、分析与应用表达的科学和技术。
随着摄影测量进展到数字摄影测量阶段及多传感器、多分辨率、多光谱、多时段遥感影像与空间科学、电子科学、地球科学、计算机科学以及其他边缘学科的交叉渗透、相互融合,摄影测量与遥感已逐渐进展成为一门新型的地球空间信息科学。
由于它的科学性、技术性、应用性、服务性以及所涉及的广泛科学技术领域,其应用已深化到经济建设、社会进展、国家安全和人民生活等各个方面。
摄影测量学空间后方交会实验报告
摄影测量学实验报告实验一、单像空间后方交会学院:建测学院班级:测绘082姓名:肖澎学号: 15一.实验目的1.深入了解单像空间后方交会的计算过程;2.加强空间后方交会基本公式和误差方程式,法线方程式的记忆;3.通过上机调试程序加强动手能力的培养。
二.实验原理以单幅影像为基础,从该影像所覆盖地面范围内若干控制点和相应点的像坐标量测值出发,根据共线条件方程,求解该影像在航空摄影时刻的相片外方位元素。
三.实验内容1.程序图框图2.实验数据(1)已知航摄仪内方位元素f=153.24mm,Xo=Yo=0。
限差0.1秒(2)已知4对点的影像坐标和地面坐标:3.实验程序using System;using System.Collections.Generic;using System.Linq;using System.Text;namespace ConsoleApplication3{class Program{static void Main(){//输入比例尺,主距,参与平参点的个数Console.WriteLine("请输入比例尺分母m:\r");string m1 = Console.ReadLine();double m = (double)Convert.ToSingle(m1);Console.WriteLine("请输入主距f:\r");string f1 = Console.ReadLine();double f = (double)Convert.ToSingle(f1);Console.WriteLine("请输入参与平差控制点的个数n:\r");string n1 = Console.ReadLine();int n = (int)Convert.ToSingle(n1);//像点坐标的输入代码double[] arr1 = new double[2 * n];//1.像点x坐标的输入for (int i = 0; i < n; i++){Console.WriteLine("请输入已进行系统误差改正的像点坐标的x{0}值:\r", i+1);string u = Console.ReadLine();for (int j = 0; j < n; j += 2){arr1[j] = (double)Convert.ToSingle(u);}}//2.像点y坐标的输入for (int i = 0; i < n; i++){Console.WriteLine("请输入已进行系统误差改正的像点坐标的y{0}值:\r", i+1);string v = Console.ReadLine();for (int j = 1; j < n; j += 2){arr1[j] = (double)Convert.ToSingle(v);}}//控制点的坐标输入代码double[,] arr2 = new double[n, 3];//1.控制点X坐标的输入for (int j = 0; j < n; j++){Console.WriteLine("请输入控制点在地面摄影测量坐标系的坐标的X{0}值:\r", j+1);string u = Console.ReadLine();arr2[j , 0] = (double)Convert.ToSingle(u);}//2.控制点Y坐标的输入for (int k = 0; k < n; k++){Console.WriteLine("请输入控制点在地面摄影测量坐标系的坐标的Y{0}值:\r", k+1);string v = Console.ReadLine();arr2[k , 1] = (double)Convert.ToSingle(v);}//3.控制点Z坐标的输入for (int p =0; p < n; p++){Console.WriteLine("请输入控制点在地面摄影测量坐标系的坐标的Z{0}值:\r", p+1);string w = Console.ReadLine();arr2[p , 2] = (double)Convert.ToSingle(w);}//确定外方位元素的初始值//1.确定Xs的初始值:double Xs0 = 0;double sumx = 0;for (int j = 0; j < n; j++){double h = arr2[j, 0];sumx += h;}Xs0 = sumx / n;//2.确定Ys的初始值:double Ys0 = 0;double sumy = 0;for (int j = 0; j < n; j++){double h = arr2[j, 1];sumy += h;}Ys0 = sumy / n;//3.确定Zs的初始值:double Zs0 = 0;double sumz = 0;for (int j = 0; j <= n - 1; j++){double h = arr2[j, 2];sumz += h;}Zs0 = sumz / n;doubleΦ0 = 0;doubleΨ0 = 0;double K0 = 0;Console.WriteLine("Xs0,Ys0,Zs0,Φ0,Ψ0,K0的值分别是:{0},{1},{2},{3},{4},{5}", Xs0, Ys0, Zs0, 0, 0, 0);//用三个角元素的初始值按(3-4-5)计算各方向余弦值,组成旋转矩阵,此时的旋转矩阵为单位矩阵I:double[,] arr3 = new double[3, 3];for (int i = 0; i < 3; i++)arr3[i, i] = 1;}double a1 = arr3[0, 0]; double a2 = arr3[0, 1]; double a3 = arr3[0, 2];double b1 = arr3[1, 0]; double b2 = arr3[1, 1]; double b3 = arr3[1, 2];double c1 = arr3[2, 0]; double c2 = arr3[2, 1]; double c3 = arr3[2, 2];/*利用线元素的初始值和控制点的地面坐标,代入共线方程(3-5-2),* 逐点计算像点坐标的近似值*///1.定义存放像点近似值的数组double[] arr4 = new double[2 * n];//----------近似值矩阵//2.逐点像点坐标计算近似值//a.计算像点的x坐标近似值(x)for (int i = 0; i < 2 * n; i += 2){for (int j = 0; j < n; j++){arr4[i] = -f * (a1 * (arr2[j, 0] - Xs0) + b1 * (arr2[j, 1] - Ys0) + c1 * (arr2[j, 2] - Zs0)) / (a3 * (arr2[j, 0] - Xs0) + b3 * (arr2[j, 1] - Ys0) + c3 * (arr2[j, 2] - Zs0)); }}//b.计算像点的y坐标近似值(y)for (int i = 1; i < 2 * n; i += 2){for (int j = 0; j < n; j++){arr4[i] = -f * (a2 * (arr2[j, 0] - Xs0) + b2 * (arr2[j, 1] - Ys0) + c2 * (arr2[j, 2] - Zs0)) / (a3 * (arr2[j, 0] - Xs0) + b3 * (arr2[j, 1] - Ys0) + c3 * (arr2[j, 2] - Zs0)); }}//逐点计算误差方程式的系数和常数项,组成误差方程:double[,] arr5 = new double[2 * n, 6]; //------------系数矩阵(A)//1.计算dXs的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 0] = -1 / m; //-f/H == -1/m}//2.计算dYs的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 1] = -1 / m; //-f/H == -1/m}//3.a.计算误差方程式Vx中dZs的系数for (int i = 0; i < 2 * n; i += 2)arr5[i, 2] = -arr1[i] / m * f;}//3.b.计算误差方程式Vy中dZs的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 2] = -arr1[i] / m * f;}//4.a.计算误差方程式Vx中dΦ的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 3] = -f * (1 + arr1[i] * arr1[i] / f * f);}//4.a.计算误差方程式Vy中dΦ的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 3] = -arr1[i - 1] * arr1[i] / f;}//5.a.计算误差方程式Vx中dΨ的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 4] = -arr1[i] * arr1[i + 1] / f;}//5.b.计算误差方程式Vy中dΨ的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 4] = -f * (1 + arr1[i] * arr1[i] / f * f);}//6.a.计算误差方程式Vx中dk的系数for (int i = 0; i < 2 * n; i += 2){arr5[i, 5] = arr1[i + 1];}//6.b.计算误差方程式Vy中dk的系数for (int i = 1; i < 2 * n; i += 2){arr5[i, 5] = -arr1[i - 1];}//定义外方位元素组成的数组double[] arr6 = new double[6];//--------------------外方位元素改正数矩阵(X)//定义常数项元素组成的数组double[] arr7 = new double[2 * n];//-----------------常数矩阵(L)//计算lx的值for (int i = 0; i < 2 * n; i += 2)arr7[i] = arr1[i] - arr4[i]; //将近似值矩阵的元素代入}//计算ly的值for (int i = 1; i <= 2 * (n - 1); i += 2){arr7[i] = arr1[i] - arr4[i]; //将近似值矩阵的元素代入}/* 对于所有像点的坐标观测值,一般认为是等精度量测,所以权阵P为单位阵.所以X=(ATA)-1ATL *///1.计算ATdouble[,] arr5T = new double[6, 2 * n];for (int i = 0; i < 6; i++){for (int j = 0; j < 2 * n; j++){arr5T[i, j] = arr5[j, i];}}//A的转置与A的乘积,存放在arr5AA中double[,] arr5AA = new double[6, 6];for (int i = 0; i < 6; i++){for (int j = 0; j < 6; j++){arr5AA[i, j] = 0;for (int l = 0; l < 2 * n; l++){arr5AA[i, j] += arr5T[i, l] * arr5[l, j];}}}nijuzhen(arr5AA);//arr5AA经过求逆后变成原矩阵的逆矩阵//arr5AA * arr5T存在arr5AARATdouble[,] arr5AARAT = new double[6, 2 * n];for (int i = 0; i < 6; i++){for (int j = 0; j < 2 * n; j++){arr5AARAT[i, j] = 0;for (int p = 0; p < 6; p++){arr5AARAT[i, j] += arr5AA[i, p] * arr5T[p, j];}}}//计算arr5AARAT x L,存在arrX中double[] arrX = new double[6];for (int i = 0; i < 6; i++){for (int j = 0; j < 1; j++){arrX[i] = 0;for (int vv = 0; vv < 6; vv++){arrX[i] += arr5AARAT[i, vv] * arr7[vv];}}}//计算外方位元素值double Xs, Ys, Zs, Φ, Ψ, K;Xs = Xs0 + arrX[0];Ys = Ys0 + arrX[1];Zs = Zs0 + arrX[2];Φ = Φ0 + arrX[3];Ψ = Ψ0 + arrX[4];K = K0 + arrX[5];for (int i = 0; i <= 2; i++){Xs += arrX[0];Ys += arrX[1];Zs += arrX[2];Φ += arrX[3];Ψ += arrX[4];K += arrX[5];}Console.WriteLine("Xs,Ys,Zs,Φ,Ψ,K的值分别是:{0},{1},{2},{3},{4},{5}", Xs0, Ys0, Zs0, Φ, Ψ, K);Console.Read();}//求arr5AA的逆矩public static double[,] nijuzhen(double[,] a) {double[,] B = new double[6, 6];int i, j, k;int row = 0;int col = 0;double max, temp;int[] p = new int[6];for (i = 0; i < 6; i++){p[i] = i;B[i, i] = 1;}for (k = 0; k < 6; k++){//找主元max = 0; row = col = i;for (i = k; i < 6; i++){for (j = k; j < 6; j++){temp = Math.Abs(a[i, j]);if (max < temp){max = temp;row = i;col = j;}}}//交换行列,将主元调整到k行k列上if (row != k){for (j = 0; j < 6; j++){temp = a[row, j];a[row, j] = a[k, j];a[k, j] = temp;temp = B[row, j];B[row, j] = B[k, j];B[k, j] = temp;i = p[row]; p[row] = p[k]; p[k] = i; }if (col != k){for (i = 0; i < 6; i++){temp = a[i, col];a[i, col] = a[i, k];a[i, k] = temp;}}//处理for (j = k + 1; j < 6; j++){a[k, j] /= a[k, k];}for (j = 0; j < 6; j++){B[k, j] /= a[k, k];a[k, k] = 1;}for (j = k + 1; j < 6; j++){for (i = 0; j < k; i++){a[i, j] -= a[i, k] * a[k, j];}for (i = k + 1; i < 6; i++){a[i, j] -= a[i, k] * a[k, j];}}for (j = 0; j < 6; j++){for (i = 0; i < k; i++){B[i, j] -= a[i, k] * B[k, j];}for (i = k + 1; i < 6; i++){B[i, j] -= a[i, k] * B[k, j];}for (i = 0; i < 6; i++) {a[i, k] = 0;a[k, k] = 1;}}//恢复行列次序for (j = 0; j < 6; j++){for (i = 0; i < 6; i++) {a[p[i], j] = B[i, j]; }}for (i = 0; i < 6; i++){for (j = 0; j < 6; j++) {a[i, j] = a[i, j];}}return a;}4.实验结果四.实验总结此次实验让我深入了解单像空间后方交会的计算过程,加强了对空间后方交会基本公式和误差方程式,法线方程式的记忆。
双像解析摄影测量三种方法的比较-学习心得
双像解析摄影测量三种⽅法的⽐较-学习⼼得双像解析摄影测量三种⽅法的⽐较为了加强印象,还是要做做笔记的,那继续做电⼦笔记吧双像解析摄影测量三种⽅法的⽐较:后⽅交会-前⽅交会⽅法;相对定向-绝对定向法;⼀步定向法后⽅交会-前⽅交会法主要步骤:⾸先进⾏后⽅交会,利⽤单张影像上3个以上已知控制点分别计算像⽚外⽅位元素,再通过前⽅交会计算出地⾯⽬标的物⽅坐标。
该⽅法的缺点在于每张影像上都必须有3个以上控制点,并且前⽅交会求取的地⾯点坐标的精度取决于后⽅交会所解算外⽅位元素的精度(前⽅交会过程没有充分利⽤多余条件进⾏平差计算)。
因此,该⽅法往往在已知影像的外⽅位元素、需确定少量的待定点坐标时采⽤。
相对定向-绝对定向法主要步骤:⾸先利⽤两张影像重叠区内5对以上同名点,按照共⾯条件⽅程解算相对定向元素,并计算同名点模型坐标,同时要求⾄少2个平⾼点1个⾼程点位于像⽚重叠区内以计算控制点模型坐标。
然后利⽤控制点模型坐标和对应地⾯坐标根据三维相似变换⽅程解算出绝对定向元素。
最后根据绝对定向元素求取⽬标的物⽅坐标。
(计算公式⽐较多,⽤这种⽅法的解算结果不能严格表达⼀幅图像的外⽅位元素)该⽅法的缺点在于需要已知重叠区内最少5对同名点。
同样地,绝对定向的精度取决于相对定向精度。
因此常⽤于航带法解析三⾓测量的应⽤。
⼀步定向法主要步骤:利⽤已有控制点地⾯坐标、像⽚上对应像点坐标,根据共线条件⽅程⼀步解算出像⽚外⽅位元素和⽬标的地⾯坐标。
该⽅法⼀步完成,精度完全由控制点和像点坐标量测精度决定,理论上⽐以上两种⽅法精度⾼。
但该⽅法相较以上两种⽅法,求解过程较复杂。
(待定点的坐标是完全按最⼩⼆乘法原理解求出来的,该⽅法常⽤于光线束法解析空中三⾓测量中的应⽤。
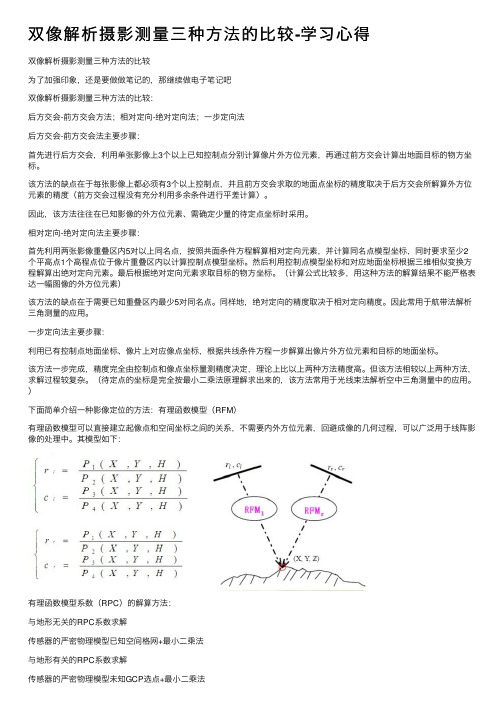
)下⾯简单介绍⼀种影像定位的⽅法:有理函数模型(RFM)有理函数模型可以直接建⽴起像点和空间坐标之间的关系,不需要内外⽅位元素,回避成像的⼏何过程,可以⼴泛⽤于线阵影像的处理中。
空间后方—前方交会的原理

空间后方—前方交会的原理
空间后方交会和前方交会都是航天技术中的重要概念。
空间后方交会是通过地面控制点和像片上的像点来确定单幅影像的外方位元素的方法。
这种方法以单张像片为基础,求解每张像片的外方位元素,确定被摄物体与航摄像片的几何关系。
后方交会需要地面控制点,依靠单张像片就可求出其外方位元素。
而前方交会则是利用立体像对的同名像点求解地面点坐标的过程。
它利用同名像点坐标和像对的相对方位元素解算模型点坐标。
这种方法在确定了被摄物体与航摄像片的几何关系后,利用立体像对同名像点对对相交的原理确定物方空间坐标。
如需了解更多关于空间后方—前方交会原理的信息,建议查阅航天领域相关书籍或咨询专业人士。
摄影测量实习报告
摄影测量实习报告——单张影像空间后方交会程序设计实习时间 2013.5.20-2013.5.24 学生班级测绘10-2班学生姓名刘航学生学号 1072143212 所在院系矿业工程学院指导教师张会战邵亚琴1.深入理解单片空间后方交会的原理,体会在有多余观测情况下,用最小二乘平差方法编程实现解求影像外方位元素的过程。
2.掌握空间后方交会的定义和实现算法(1) 定义:空间后方交会是以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的外方位元素Xs,Ys,Zs,φ,ω,κ。
(2) 算法:由于每一对像方和物方共轭点可列出2个方程,因此若有3个已知地面坐标的控制点,则可列出6个方程,解求6个外方位元素的改正数△Xs,△Ys,△Zs,△φ,△ω,△κ。
实际应用中为了提高解算精度,常有多余观测方程,通常是在影像的四个角上选取4个或均匀地选择更多的地面控制点,因而要用最小二乘平差方法进行计算。
3. 利用Visual C++或者Matlab(或其他熟悉的计算机语言)编写一个完整的单片空间后方交会程序,通过对提供的试验数据进行计算,输出像片的外方位元素并进行评定精度。
4.通过编写程序实现单张影像空间后方交会计算,掌握非线性方程线性化的过程、相应数据读入与存储的方法以及迭代计算的特点,巩固各类基础课程及计算机课程的学习内容,培养上机调试程序的动手能力,通过对实验结果的分析,增强综合运用所学知识解决专业实际问题的能力。
二、实习环境1.硬件环境:Window操作系统2.软件环境:VC++或Matlab或其他计算机语言利用一定数量的地面控制点,根据共线条件方程求解像片外方位元素并进行精度评定。
四、实习原理以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,求解该影象在航空摄影时刻的像片外方位元素 Xs,Ys,Zs,ф,ω,κ。
摄影测量实验报告(空间后方交会—前方交会)
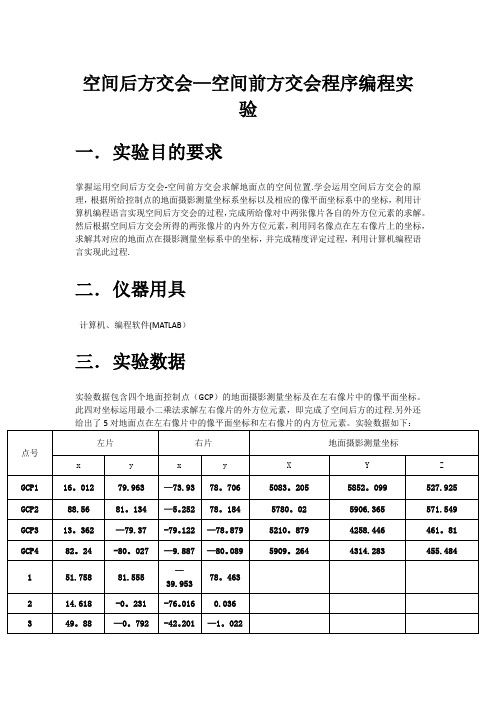
空间后方交会—空间前方交会程序编程实验一.实验目的要求掌握运用空间后方交会-空间前方交会求解地面点的空间位置.学会运用空间后方交会的原理,根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标,利用计算机编程语言实现空间后方交会的过程,完成所给像对中两张像片各自的外方位元素的求解。
然后根据空间后方交会所得的两张像片的内外方位元素,利用同名像点在左右像片上的坐标,求解其对应的地面点在摄影测量坐标系中的坐标,并完成精度评定过程,利用计算机编程语言实现此过程.二.仪器用具计算机、编程软件(MATLAB)三.实验数据实验数据包含四个地面控制点(GCP)的地面摄影测量坐标及在左右像片中的像平面坐标。
此四对坐标运用最小二乘法求解左右像片的外方位元素,即完成了空间后方的过程.另外还给出了5对地面点在左右像片中的像平面坐标和左右像片的内方位元素。
实验数据如下:内方位元素:f=152。
000mm,x0=0,y0=0 四.实验框图此过程完成空间后方交会求解像片的外方位元素,其中改正数小于限差(0。
00003,相当于0。
1'的角度值)为止。
在这个过程中采用迭代的方法,是外方位元素逐渐收敛于理论值,每次迭代所得的改正数都应加到上一次的初始值之中。
在空间后方交会中运用的数学模型为共线方程确定Xs,Ys,Zs的初始值时,对于左片可取地面左边两个GCP的坐标的平均值作为左片Xs 和Ys的初始值,取右边两个GCP的坐标平均值作为右片Xs 和Ys的初始值。
Zs可取地面所有GCP的Z坐标的平均值再加上航高.空间前方交会的数学模型为:五.实验源代码function Main_KJQHFJH()global R g1 g2 m G a c b1 b2;m=10000;a=5;c=4;feval(@shuru);%调用shuru()shurujcp()函数完成像点及feval(@shurujcp);%CCP有关数据的输入XYZ=feval(@MQZqianfangjh); %调用MQZqianfangjh()函数完成空间前方、%%%%%% 单位权中误差%%%%%后方交会计算解得外方位元素global V1 V2;%由于以上三个函数定义在外部文件中故需VV=[]; %用feval()完成调用过程for i=1:2*cVV(i)=V1(i);VV(2*i+1)=V2(i);endm0=sqrt(VV*(VV’)/(2*c-6));disp('单位权中误差m0为正负:’);disp(m0); %计算单位权中误差并将其输出显示输入GCP像点坐标及地面摄影测量坐标系坐标的函数和输入所求点像点坐标函数:function shurujcp()global c m;m=input(’摄影比例尺:');%输入GCP像点坐标数据函数并分别将其c=input('GCP的总数=');%存入到不同的矩阵之中disp('GCP左片像框标坐标:');global g1;g1=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g1(i,1)=m;g1(i,2)=n;i=i+1;enddisp('GCP右片像框标坐标:’);global g2;g2=zeros(c,2);i=1;while i〈=cm=input('x=’);n=input('y=’);g2(i,1)=m;g2(i,2)=n;i=i+1;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function shuru()global a;a=input('计算总像对点数='); %完成想计算所需的像平面坐标global b1;%坐标输入,存入不同的矩阵中b1=zeros(a,2);disp('左片像点坐标:')i=1;while i〈=am=input('x=’);n=input(’y=’);b1(i,1)=m;b1(i,2)=n;i=i+1;end%%global b2;b2=zeros(a,2);disp(’右片像点坐标:')i=1;while i〈=am=input('x=’);n=input('y=’);b2(i,1)=m;b2(i,2)=n;i=i+1;end%%global c;c=input(’GCP的总数=');disp('GCP摄影测量系坐标:’)global G;G=zeros(3,c);i=1;while i〈=cm=input(’X=');n=input(’Y=');v=input(’Z=');G(i,1)=m;G(i,2)=n;G(i,3)=v;i=i+1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间前方交会和后方交会函数:function XYZ=MQZqianfangjh()global R1 R2 a f b1 b2 Ra Rb;global X1 X2;R1=Ra;R2=Rb;R1=zeros(3,3);R2=zeros(3,3);global g1 g2 G V1 V2 V WF c QXX QXX1 QXX2;xs0=(G(1,1)+G(3,1))/2;ys0=(G(1,2)+G(3,2))/2;[Xs1,Ys1,Zs1,q1,w1,k1 R]=houfangjh(g1,xs0,ys0);%对左片调用后方交会函数R1=R;V1=V;WF1=WF;QXX1=QXX;save '左片外方位元素为。
单像空间后方交会实习报告
框图。
3
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,通力根1保过据护管生高线产中敷工资设艺料技高试术中卷0资不配料仅置试可技卷以术要解是求决指,吊机对顶组电层在气配进设置行备不继进规电行范保空高护载中高与资中带料资负试料荷卷试下问卷高题总中2体2资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况1卷中下安,与全要过,加度并强工且看作尽护下可1都关能可于地以管缩正路小常高故工中障作资高;料中对试资于卷料继连试电接卷保管破护口坏进处范行理围整高,核中或对资者定料对值试某,卷些审弯异核扁常与度高校固中对定资图盒料纸位试,置卷编.工保写况护复进层杂行防设自腐备动跨与处接装理地置,线高尤弯中其曲资要半料避径试免标卷错高调误等试高,方中要案资求,料技编试术写5、卷交重电保底要气护。设设装管备备置线4高、调动敷中电试作设资气高,技料课中并3术试、件资且中卷管中料拒包试路调试绝含验敷试卷动线方设技作槽案技术,、以术来管及避架系免等统不多启必项动要方高式案中,;资为对料解整试决套卷高启突中动然语过停文程机电中。气高因课中此件资,中料电管试力壁卷高薄电中、气资接设料口备试不进卷严行保等调护问试装题工置,作调合并试理且技利进术用行,管过要线关求敷运电设行力技高保术中护。资装线料置缆试做敷卷到设技准原术确则指灵:导活在。。分对对线于于盒调差处试动,过保当程护不中装同高置电中高压资中回料资路试料交卷试叉技卷时术调,问试应题技采,术用作是金为指属调发隔试电板人机进员一行,变隔需压开要器处在组理事在;前发同掌生一握内线图部槽 纸故内资障,料时强、,电设需回备要路制进须造行同厂外时家部切出电断具源习高高题中中电资资源料料,试试线卷卷缆试切敷验除设报从完告而毕与采,相用要关高进技中行术资检资料查料试和,卷检并主测且要处了保理解护。现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空间后方交会-空间前方交会程序编程实验一.实验目的要求掌握运用空间后方交会-空间前方交会求解地面点的空间位置。
学会运用空间后方交会的原理,根据所给控制点的地面摄影测量坐标系坐标以及相应的像平面坐标系中的坐标,利用计算机编程语言实现空间后方交会的过程,完成所给像对中两张像片各自的外方位元素的求解。
然后根据空间后方交会所得的两张像片的内外方位元素,利用同名像点在左右像片上的坐标,求解其对应的地面点在摄影测量坐标系中的坐标,并完成精度评定过程,利用计算机编程语言实现此过程。
二.仪器用具计算机、编程软件(MATLAB)三.实验数据实验数据包含四个地面控制点(GCP)的地面摄影测量坐标及在左右像片中的像平面坐标。
此四对坐标运用最小二乘法求解左右像片的外方位元素,即完成了空间后方的过程。
另外还内方位元素:f=152.000mm,x0=0,y0=0四.实验框图此过程完成空间后方交会求解像片的外方位元素,其中改正数小于限差(0.00003,相当于0.1’的角度值)为止。
在这个过程中采用迭代的方法,是外方位元素逐渐收敛于理论值,每次迭代所得的改正数都应加到上一次的初始值之中。
在空间后方交会中运用的数学模型为共线方程确定Xs,Ys,Zs的初始值时,对于左片可取地面左边两个GCP的坐标的平均值作为左片Xs 和Ys的初始值,取右边两个GCP的坐标平均值作为右片Xs 和Ys的初始值。
Zs可取地面所有GCP的Z坐标的平均值再加上航高。
空间前方交会的数学模型为:五.实验源代码function Main_KJQHFJH()global R g1 g2 m G a c b1 b2;m=10000;a=5;c=4;feval(@shuru); %调用shuru()shurujcp()函数完成像点及feval(@shurujcp); %CCP有关数据的输入XYZ=feval(@MQZqianfangjh); %调用MQZqianfangjh()函数完成空间前方、%%%%%% 单位权中误差%%%% %后方交会计算解得外方位元素global V1 V2; %由于以上三个函数定义在外部文件中故需VV=[]; %用feval()完成调用过程for i=1:2*cVV(i)=V1(i);VV(2*i+1)=V2(i);endm0=sqrt(VV*(VV')/(2*c-6));disp('单位权中误差m0为正负:');disp(m0); %计算单位权中误差并将其输出显示输入GCP像点坐标及地面摄影测量坐标系坐标的函数和输入所求点像点坐标函数:function shurujcp()global c m;m=input('摄影比例尺:'); %输入GCP像点坐标数据函数并分别将其c=input('GCP的总数='); % 存入到不同的矩阵之中disp('GCP左片像框标坐标:');global g1;g1=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g1(i,1)=m;g1(i,2)=n;i=i+1;enddisp('GCP右片像框标坐标:');global g2;g2=zeros(c,2);i=1;while i<=cm=input('x=');n=input('y=');g2(i,1)=m;g2(i,2)=n;i=i+1;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function shuru()global a;a=input('计算总像对点数='); %完成想计算所需的像平面坐标global b1; %坐标输入,存入不同的矩阵中b1=zeros(a,2);disp('左片像点坐标:')i=1;while i<=am=input('x=');n=input('y=');b1(i,1)=m;b1(i,2)=n;i=i+1;end%%global b2;b2=zeros(a,2);disp('右片像点坐标:')i=1;while i<=am=input('x=');n=input('y=');b2(i,1)=m;b2(i,2)=n;i=i+1;end%%global c;c=input('GCP的总数=');disp('GCP摄影测量系坐标:')global G;G=zeros(3,c);i=1;while i<=cm=input('X=');n=input('Y=');v=input('Z=');G(i,1)=m;G(i,2)=n;G(i,3)=v;i=i+1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间前方交会和后方交会函数:function XYZ=MQZqianfangjh()global R1 R2 a f b1 b2 Ra Rb;global X1 X2;R1=Ra;R2=Rb;R1=zeros(3,3);R2=zeros(3,3);global g1 g2 G V1 V2 V WF c QXX QXX1 QXX2;xs0=(G(1,1)+G(3,1))/2;ys0=(G(1,2)+G(3,2))/2;[Xs1,Ys1,Zs1,q1,w1,k1 R]=houfangjh(g1,xs0,ys0); %对左片调用后方交会函数R1=R;V1=V;WF1=WF;QXX1=QXX;save '左片外方位元素为.txt' WF -ascii %将计算所得的外方位元素存入到.txt% 文件中for i=1:cg1(i,1)=g1(i,1)+V1(2*i-1);g1(i,2)=g1(i,2)+V1(2*i);endsave '左片像点坐标.txt' g1 -asciixs0=(G(2,1)+G(4,1))/2;ys0=(G(2,2)+G(4,2))/2;[Xs2,Ys2,Zs2,q2,w2,k2 R]=houfangjh(g2,xs0,ys0); %对右片调用后方交会函数R2=R;V2=V;WF2=WF;QXX2=QXX;save '右片外方位元素为.txt' WF –ascii %将计算所得的外方位元素存入到.txt% 文件中for i=1:cg2(i,1)=g2(i,1)+V2(2*i-1);g2(i,2)=g2(i,2)+V2(2*i);endsave '右片像点坐标.txt' g2 -asciiX1=zeros(a,3);X2=zeros(a,3);xx=zeros(3,1);xxx=zeros(3,1);for i=1:ass=[b1(i,1);b1(i,2);-f];dd=[b2(i,1);b2(i,2);-f];xx=R1*ss;X1(i,:)=xx';xxx=R2*dd;X2(i,:)=xxx';endglobal Xs1 Xs2 Ys1 Ys2 Zs1 Zs2;BX=Xs2-Xs1;BY=Ys2-Ys1;BZ=Zs2-Zs1;global N1 N2;N1=zeros(1,a);N2=zeros(1,a);for i=1:aN1(1,i)=(BX*X2(i,3)-BZ*X2(i,1))/(X1(i,1)*X2(i,3)-X2(i,1)*X1(i,3));N2(1,i)=(BX*X1(i,3)-BZ*X1(i,1))/(X1(i,1)*X2(i,3)-X2(i,1)*X1(i,3));end %计算投影系数,并计算五点的三维坐标global XYZ;XYZ=zeros(a,3);for i=1:aXYZ(i,1)=Xs1+N1(1,i)*X1(i,1);XYZ(i,3)=Zs1+N1(1,i)*X1(i,3);XYZ(i,2)=((Ys1+N1(1,i)*X1(i,2))+(Ys2+N2(1,i)*X2(i,2)))/2;enddisp('左片外方位元素为:Xs Ys Zs ψωκ');disp(WF1);disp('左片外方位元素协因素阵为:');disp(QXX1);disp('左片像点坐标为:')disp(g1)disp('右片外方位元素为:Xs Ys Zs ψωκ');disp(WF2);disp('右片外方位元素协因素阵为:')disp(QXX2)disp('右片像点坐标为:')disp(g2)disp('计算所得点摄影测量坐标(X,Y,Z)为:');disp(XYZ);save 'XYZ.txt' XYZ -ascii %将计算所得结果保存到XYZ.txt文件中%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [Xs,Ys,Zs,q,w,k R]=houfangjh(g1,Xs0,Ys0) %计算像片外方位元素%%%%%%%%%%global f G m c b1 b2;f=0.152;Xs=Xs0;Ys=Ys0;Zs=m*f+G(1,3);q=0;w=0;k=0;while 1 %实现一个永真循环,是改正数小于限差以后跳出循环a1=cos(q)*cos(k)-sin(q)*sin(w)*sin(k);a2=-cos(q)*sin(k)-sin(q)*sin(w)*cos(k);a3=-sin(q)*cos(w);b1_=cos(w)*sin(k);b2_=cos(w)*cos(k);b3=-sin(w);c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);c2=-sin(q)*sin(k)+cos(q)*sin(w)*cos(k);c3=cos(q)*cos(w);R=[a1,a2,a3;b1_,b2_,b3;c1,c2,c3];aX=[];aY=[];aZ=[];for i=1:caX(i)=a1*(G(i,1)-Xs)+b1_*(G(i,2)-Ys)+c1*(G(i,3)-Zs);aY(i)=a2*(G(i,1)-Xs)+b2_*(G(i,2)-Ys)+c2*(G(i,3)-Zs);aZ(i)=a3*(G(i,1)-Xs)+b3*(G(i,2)-Ys)+c3*(G(i,3)-Zs);endxj=[];yj=[];for i=1:cxj(i)=-f*aX(i)/aZ(i);yj(i)=-f*aY(i)/aZ(i);enda11=[];a12=[];a13=[];a14=[];a15=[];a16=[];a21=[];a22=[];a23=[];a24=[];a25=[];a26=[];for i=1:ca11(i)=(a1*f+a3*g1(i,1))/aZ(i);a12(i)=(b1_*f+b3*g1(i,1))/aZ(i);a13(i)=(c1*f+c3*g1(i,1) )/aZ(i);a21(i)=(a2*f+a3*g1(i,2))/aZ(i);a22(i)=(b2_*f+b3*g1(i,2))/aZ(i);a23(i)=(c2*f+c3*g1(i,2) )/aZ(i);a14(i)=g1(i,2)*sin(w)-(g1(i,1)*(g1(i,1)*cos(k)-g1(i,2)*sin(k))/f+f*cos(k))*cos(w);a15(i)=-f*sin(k)-g1(i,1)*(g1(i,1)*sin(k)+g1(i,2)*cos(k))/f;a16(i)=g1(i,2);a24(i)=-g1(i,1)*sin(w)-(g1(i,2)*(g1(i,1)*cos(k)-g1(i,2)*sin(k))/f-f*sin(k))*cos(w);a25(i)=-f*cos(k)-g1(i,2)*(g1(i,1)*sin(k)+g1(i,2)*cos(k))/f;a26(i)=-g1(i,1);endlx=[];ly=[];for i=1:clx(i)=g1(i,1)-xj(i);ly(i)=g1(i,2)-yj(i);endA=zeros(2*c,6);for i=1:cA(2*i-1,1)=a11(i);A(2*i-1,2)=a12(i);A(2*i-1,3)=a13(i);A(2*i-1,4)=a14(i);A(2*i-1,5)=a15 (i);A(2*i-1,6)=a16(i);A(2*i,1)=a21(i); A(2*i,2)=a22(i); A(2*i,3)=a23(i); A(2*i,4)=a24(i); A(2*i,5)=a25(i); A(2*i,6)=a26(i);endL=zeros(2*c,1);for i=1:cL(2*i-1,1)=lx(i);L(2*i,1)=ly(i);endX=inv((A')*A)*(A')*L;Xs=Xs+X(1,1);Ys=Ys+X(2,1);Zs=Zs+X(3,1);q=q+X(4,1);w=w+X(5,1);k=k+X(6,1);Xabs=abs(X);aaa=max(Xabs);if aaa<0.00003 %当改正数中绝对值最大的改正数小于限差0.00003 break; %后跳出循环,计算结果已经收敛endendglobal V;V=L';global WF QXX;WF(1)=Xs;WF(2)=Ys;WF(3)=Zs;WF(4)=q;WF(5)=w;WF(6)=k;QXX=A'*A;六.实验结果左片外方位元素Xs,Ys,Zs,ψ、ω、κ、为:5.0001950e+003 5.0007250e+003 2.0201583e+003 -7.2888190e-005 2.8193877e-002 9.5130388e-002左片外方位元素协因素阵为:4.0166895e-008 -3.7263703e-010 1.3218695e-008 7.0720033e-005 1.0001730e-007 -2.5748604e-006-3.7263703e-010 4.0032797e-008 2.6568407e-009 -2.1103715e-007 7.7772275e-005 1.9993587e-0051.3218695e-0082.6568407e-009 1.7931301e-0083.1008915e-005 6.6697659e-006 5.6403374e-0077.0720033e-005 -2.1103715e-007 3.1008915e-005 1.3087511e-001 1.0148977e-003 -1.9981396e-0031.0001730e-007 7.7772275e-005 6.6697659e-006 1.0148977e-003 1.5539404e-001 3.0264331e-002-2.5748604e-006 1.9993587e-005 5.6403374e-007 -1.9981396e-003 3.0264331e-002 4.0721943e-002左片外方位元素Xs,Ys,Zs,ψ、ω、κ、为:5.8967023e+003 5.0687355e+003 2.0506347e+003 1.4337709e-002 4.6257617e-0021.1037952e-001右片外方位元素协因素阵为:3.9305329e-0084.9400147e-010 -1.0339207e-008 6.8065940e-005 -4.2504770e-007 1.8461496e-0064.9400147e-010 3.9051893e-008 3.3958896e-011 -3.9945442e-008 7.6312421e-005 -1.6453951e-005-1.0339207e-008 3.3958896e-011 1.5155886e-008 -2.3705097e-005 3.5940467e-007 -7.3527082e-0076.8065940e-005 -3.9945442e-008 -2.3705097e-005 1.2229164e-001 -2.3449223e-003 4.8281474e-003-4.2504770e-007 7.6312421e-005 3.5940467e-007 -2.3449223e-003 1.5233230e-001 -2.5374659e-0021.8461496e-006 -1.6453951e-005 -7.3527082e-007 4.8281474e-003 -2.5374659e-0023.6794789e-002GCP在左片和右片改正后的坐标(x,y)为:1.6019582e-002 7.9954660e-002 -7.3934212e-002 7.8699356e-0028.8559633e-002 8.1141190e-002 -5.2455612e-003 7.8187184e-0021.3352398e-002 -7.9378247e-002 -7.9125440e-002 -7.8877760e-0028.2242309e-002 -8.0017749e-002 -9.8858970e-003 -8.0086832e-002单位权中误差为:±1.515610577029578e-005所求地面点的三维坐标(X, Y, Z)为:5.4310348e+003 5.8851463e+003 5.4831646e+0025.1473645e+003 5.0555934e+003 4.8499600e+0025.4957931e+003 5.0826911e+003 5.0668967e+0025.8442434e+003 5.1098033e+003 5.3025650e+0025.5603279e+003 4.2870779e+003 4.6536459e+002七.心得体会经过三周的努力,这个当初看来艰巨的任务终于在我的不懈努力下圆满的完成了。