基于ARM和MCX314A的嵌入式运动控制器
一种基于ARM的嵌入式数控系统

关键词 : AR M; 运动控制 ; 嵌 入 式 Fra bibliotek 控 系 统
中图 分 类 号 : P 3 5 2 . 7
文 献 标 志 码 :A
文 章 编 号 :1 6 7 3 - 8 0 8 X( 2 0 1 3 ) 0 2 — 0 1 1 4 一 O 4
An e mb e d d e d CNC s y s t e m b a s e d o n ARM
A pr . 201 3
一
种 基 于 ARM 的嵌 入 式 数 控 系统
胡 森 , 郭 庆 , 王卫 俊
( 桂 林 电子 科技 大 学 电 子 工程 与 自动 化 学 院 , 广西 桂林 5 4 1 0 0 4 )
摘
要: 为 了让 数 控 系 统方 便 扩 展 各 种 接 口 , 具有更 好 的通用性 , 提 出 一 种 基 于 AR M 的嵌入 式数控 系统。A RM
Ab s t r a c t : I n o r d e r t o ma k e CNC s y s t e m mo r e c o n v e n i e n t t o e x t e n d v a r i o u s i n t e r f a c e a n d mo r e v e r s a t i l e ,a d e s i g n o f e mb e d d e d C NC s y s t e m b a s e d o n ARM i s p r e s e n t e d .Th e ma i n c o n t r o l p a n e l i s c o mp o s e d o f ARM a n d i t s p e r i p h e r a 1 . Th e p e r i p h e r a l c i r c u i t i s c o mp o s e d o f t h e mo t i o n c h i p MC X3 1 4 AL a n d i t s o p t i c a l c o u p l i n g i s o l a t i o n c i r c u i t .Th e p r o — c e s s o r¥ 3 C2 4 4 0 i s t h e c o r e o f CNC s y s t e m ,i t i s r e s p o n s i b l e f o r s e n d i n g c o n t r o l c o mma n d t o t h e mo t i o n c h i p M CX3 1 4 AL.Th e c o n t r o l p u l s e o f e l e c t r o mo t o r i s p r o d u c e d b y t h e mo t i o n c h i p M CX3 1 4 AL . Th e o u t p u t p u l s e t h r o u g h d i f f e r e n t i a l d r i v e r c a n c o n t r o l s e v e r a l d i g i t a l AC s e r v o d r i v e r s a n d s t e p p e r mo t o r d r i v e r s .Th e e x p e r i me n t r e s u l t s h o ws t h a t t h e c o n t r o l o f d e c e l e r a t i o n,i n t e r p o l a t i o n a n d o t h e r a c t i o n s o f t h e mo t o r c a n b e r e a l i z e d,t h e mo t i o n s t a t e o f e a c h mo t o r a l s o c a n b e r e a l — t i me r e f l e c t e d,t h e s y s t e m i s h i g h v e r s a t i l e a n d f l e x i b l e 。 Ke y wo r d s : ARM ;mo t i o n c o n t r o 1 ;e mb e d d e d C NC s y s t e m
基于ARM9_MCX314As的多轴嵌入式运动控制器设计
设备设计/诊断维修/再制造现代制造工程(Modern Manufacturing Engineering)2012年第6期基于ARM9+MCX314As的多轴嵌入式运动控制器设计*徐骥,汪地,林锋,杨浩,董锋,杨绍鹏(上海大学上海市机械自动化及机器人重点实验室,上海200072)摘要:阐述了基于ARM9微处理器S3C2410和专用运动控制芯片MCX314As的多轴嵌入式运动控制器设计方案。
详细介绍了运动控制器的硬件结构与主要功能,阐述了两片MCX314As实现多轴联动的方案,基于实时Linux系统建立了运动控制器的软件平台,设计了运动控制的函数库。
该运动控制器具有体积小、功耗低、成本低和精度高的优点。
关键词:嵌入式运动控制器;ARM9微处理器;MCX314As芯片;多轴联动中图分类号:TP391.8文献标志码:A文章编号:1671—3133(2012)06—0134—05Design of the multi-axis embedded motion controllerbased on ARM9and MCX314AsXu Ji,Wang Di,Lin Feng,Yang Hao,Dong Feng,Yang Shaopeng(Shanghai Key Laboratory of Mechanical Automation and Robotics,Shanghai University,Shanghai200072,China)Abstract:Design of the multi-axis embedded motion controller based on ARM9and MCX314As is introduced.The hardware structure and main function of this controller is described in detail,and the method of multi axis simultaneous is also introduced.The software platform and function library is designed based on RT-Linux.This controller has the advantages of small size,low power,low cost and high accuracy.Key words:embedded motion controller;ARM9;MCX314As;multi-axis linkage0引言目前,嵌入式系统的研究与应用己成为一个新的潮流。
基于ARM+MCX314四轴运动控制器的硬件平台

(. 1 河南 科 技 大 学 机 电 工 程 学 院 , 南 洛 阳 4 10 ;. 阳工 业 高 等 专 科 学 校 建 筑 工 程 系 , 南 洛 阳 4 10 ; 河 7032洛 河 7 0 3
3 浙 江常 山水 泥有 限公 司 , 江 常 山 34 0 ) . 浙 2 29
摘 要 : 出 以操 作 系 统 为 基 础 、 于 A M L C 24微 处 理 器 和 MC 34运动 控 制 专 用 芯 片 的 四轴 运 动 控 制 器 提 基 R P 29 X1
维普资讯
第2 8卷 第 1 期 20 0 7年 2月
河 南 科 技 大 学 学 报 :自 然 科 学 版
J u n lo n n U ie st o ce c n e h oo y: a u a ce c o r a fHe a n v ri fS in e a d T c n lg N t r l i n e y S
1 主 要芯 片 介绍
L C 2 4是基 于支持 实 时仿 真 和跟踪 的 A M7 D —SC U 的微控 制 器 , 内含 有 1 K字 节 静 态 P 29 R T MI P 片 6 R M 和 26 A 5 K字节 的高速 Fah存储 器 。 由于 L C 2 4采 用较 小 的 14脚封装 , 有 2路 3 ls P 29 4 带 2位定 时 器 、 8路 1 0位模数 转换 器 、 4路 C N现场 通讯 接 口、 A 以及 多达 9个外 部 中断等 特性 , 得 它在工 业控 制应 用 使
基于ARM和MCX314数控系统平台研究的开题报告
基于ARM和MCX314数控系统平台研究的开题报告一、课题背景随着数控技术和智能制造的不断发展,数控系统的控制和运行效率越来越高。
为了适应这种趋势,研究开发一种基于ARM和MCX314数控系统平台的数控系统具有重要意义。
ARM作为一种嵌入式处理器,具有低功耗、高性能和易于嵌入等优点,可以满足数控系统对高效、快速、低能耗、低成本的要求。
MCX314作为一种高性能数控系统,控制精度高、运行稳定、通信速度快,可以使数控系统具有更好的控制性能。
该研究旨在开发一种性能更优、功能更强大的数控系统,以满足市场上对数控系统质量、效率和性能的需求。
二、研究目的和意义本研究旨在基于ARM和MCX314数控系统平台,在软硬件环节的基础上开发一种性能更强、功能更齐全、操作更简便、运行更稳定的数控系统。
具体目的如下:1. 硬件的目的(1)设计一种基于ARM处理器的嵌入式系统,该系统能够满足数控系统对高效、快速、低能耗、低成本的要求;(2)选用MCX314作为数控系统的中央处理器,提供高精度控制和快速响应能力,提高系统运行的稳定性和可靠性。
2. 软件的目的(1)研究开发数控系统的控制和运行程序,如解析加工指令、实现插补算法、控制机床运动等;(2)设计系统界面,实现参数编辑、图形界面显示等功能,提高操控便捷性。
3.应用的目的(1)提高数控系统的控制精度和运行效率,满足不同加工需求;(2)节省人工成本和提高加工效率,从而降低生产成本,提高企业经济效益。
三、研究内容和方法该研究主要包括硬件与软件两方面研究内容。
硬件方面:选用ARM作为主控芯片设计数控系统的嵌入式硬件平台,实现稳定、高效的控制。
主要工作包括将ARM处理器与MCX314数控系统芯片相互连接,构建系统的硬件体系框架,设计数字模拟转换模块,开发电源模块等。
软件方面:主要工作包括编写控制和运行程序,如解析加工指令、实现插补算法、控制机床运动等,并开发系统界面,实现参数编辑、图形界面显示等功能。
以Linux为基的MCX314As驱动程序开发

现代制造工程2010年第3期数控加工技术以L inux为基的M CX314As驱动程序开发宋汉广,王典洪(中国地质大学机电学院,武汉430074)摘要:研究基于L inux的嵌入式数控系统中MCX314A s的驱动程序开发技术。
该设计以S3C2410(AR M920T核)处理器为硬件核心,运动控制芯片MCX314A s为从CP U,并采用实时的L inux操作系统,重点研究MCX314A s驱动程序的实现和移植,给出详细实现方案,完成在L inux系统中MCX314A s的驱动程序设计。
关键词:S3C2410处理器;MCX314A s芯片;设备驱动;L inux操作系统中图分类号:TP31111 文献标识码:B 文章编号:1671—3133(2010)03—0040—03D evelopm en t of M CX314A s dr i ves ba sed on em bedded L i n uxS ONG Han2guang,WANG D ian2hong(China University of Geosciences,W uhan430074,China)Abstract:Researches the devel opment technol ogy of device driver in e mbedded CNC syste m based on L inux.The p r ocess or core of the design is S3C2410(AR M920T core),moti on contr ol chi p s MCX314A s is the subordinate CP U,and the use of real2ti m e L inux operating syste m,expounding e mphatically how t o design moti on contr ol chi p MCX314driver in L inux,and showing the re2 alizati on of the p r ogra m,and comp leted the driver design ofMCX314A s in L inux system.Key words:S3C2410;MCX314A s;device driver;L inux0 引言作为一种全新的数控系统,采用运动控制芯片MCX314A s来完成复杂的运动控制,能够加快开发进度,并得到优秀的控制性能。
运动控制芯片MCX314及应用

龙源期刊网
运动控制芯片MCX314及应用
作者:张赞彭楚武阴光磊
来源:《电子世界》2005年第09期
摘要:本文介绍了运动控制芯片MCX314及在反应单元控制模块中对机械臂步进电机的
控制原理和实现方法,最后对该系统的安全和可靠性进行了分析。
系统的总体设计
全自动生化分析仪是集各种现代科学,特别是电子学、光学、计算机技术和各种生物化学分析技术于一体的医学化学自动检测设备,主要用于医院生化检验及药物检测、毒物分析等,也可用来进行生化与光电比色方面的试验研究。
基于STM32与MCX314的双核四轴运动控制器

1 引 言
现 代数 控运 动 控制 系统 在要 求 高速 运 算 、 快 速 插补 、 高精 度定 位 与 高 分 辨 率 等 高 性 能 的 同时 , 还 对 开放 性 与可移 植性 提 出了很 高 的要 求 l _ 】 ] 。如 今 , 拥 有高 性 能 的模 块 化 的计 算 机 控 制 系统 逐 渐 取代 了以 P L C为代 表 的 大规 模 逻 辑 电 路 , 成 为 了工 业
S HI Yu n o n g YE Ch u n s h e n g
( S c h o o l o f Ma t e r i a l S c i e n c e a n d En g i n e e r i n g,H u a z h o n g Un i v e r s i t y o f S c i e n c e a n d Te c h n o l o g y ,W u h a n 4 3 0 0 7 4 )
总第 2 9 3 期 2 0 1 4年 第 3期
计 算 机 与 数 字 工 程
C o mp u t e r& Di g i t a l En g i n e e r i n g
Vo 1 . 4 2 No . 3
51 7
基于 S T M3 2与 MC X 3 1 4的双核 四轴 运 动 控 制器
TP 1 8 1 D OI : 1 0 . 3 9 6 9 / j . i s s n 1 6 7 2 — 9 7 2 2 . 2 0 1 4 . 0 3 . 0 3 9 中 图分 类 号
MCX314As型四轴运动控制器的原理及应用.

MCX314As型四轴运动控制器的原理及应用摘要:MCX314As可以同时控制4个伺服系统或步进电机系统,可以进行各轴独立的定位控制、速度控制,亦可在4轴中的任意2轴或3轴中进行圆弧、直线、位模式插补。
能独立地设置为恒速、线性、非对称S曲线加/减控制、非对称梯形加/减速控制方式。
MCX314As增加了自动搜寻原位、输入信号滤波器、同步动作、圆弧/直线插补脉冲范围32位、完全S曲线加/减速的非对称等功能。
在应用上,MCX314As运动控制器和MCS-51单片机相结合,可以用于实现凹版摘要:MCX314As可以同时控制4个伺服系统或步进电机系统,可以进行各轴独立的定位控制、速度控制,亦可在4轴中的任意2轴或3轴中进行圆弧、直线、位模式插补。
能独立地设置为恒速、线性、非对称S曲线加/减控制、非对称梯形加/减速控制方式。
MCX314As增加了自动搜寻原位、输入信号滤波器、同步动作、圆弧/直线插补脉冲范围32位、完全S曲线加/减速的非对称等功能。
在应用上,MCX314As运动控制器和MCS-51单片机相结合,可以用于实现凹版印刷机的收放卷的张力控制,以提高产品的质量。
关键词:运动控制;MCX314As;单片机;张力控制1 引言MCX系列运动控制器是日本NOVA公司设计的专用电路,其中的MCX314As是NOVA公司最新推出的4轴运动控制器,是对MCX314功能的改进和增强。
MCX314As以单个电路同时控制4个伺服系统或步进电机系统,可进行各轴独立的定位控制、速度控制,亦可在任意2轴或3轴中进行圆弧、直线、位模式插补。
MCX314As能与8/16位数据总线接口,通过命令、数据和状态等寄存器实现4轴3联动的位置、速度、加速度等的运动控制和实时监控,实现圆弧、直线、位模式3种模式的轨迹插补,输出脉冲频率达到4 MHz。
每轴都有伺服反馈输入端、4个输入点和8个输出点,能独立地设置为恒速、线性、非对称S曲线加/减控制、非对称梯形加/减速控制方式,并有2个32位的逻辑、实际位置计数器和状态比较寄存器,实现位置的闭环控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
J &KD 微 控 器 L"E//1/
0.(%%1% 是 .D9E938 公司推出的基于支持 ]N,^ 的 *YU$% 位 ,"/_N‘/A>’ 工业级 !"/ 微控 制器 $ 片内 带 有 %WY Ma 高 速 bE:8D "P/ 和 *YMa 静 态 ",/$ 且 具 有 外 部 存 储 器 接 口 ) 通 过 片 内 .00 可 实 现 最 大 为 YV/Z[ 的 c.B 操作频率 ) 0.c%%1% 采用 *++ 脚 0db. 封装 $ 内含 % 路 c,O ’\ 路 *V 位 ,‘c ’% 个 $% 位定时 器 ’Y 路 .e/ 通 道 ’ 实 时 时 钟 ’ 看 门 狗 ’1 个 外 部 中 断 以 及 多 种 串 行 接 口 R 包 括 % 个 *YcWWV 工 业 标 准 B,"N’A%c 接 口 和 ’.A 接 口 T 等 功 能 模 块 $ 这 使 它 特 别
中国自控网 #http://www.autocontrol.com.cn > _Y > 360 元 / 年 邮局订阅号 #82-946!!!
ARM 应 用
您的论文得到相关企业家品评
收 器’
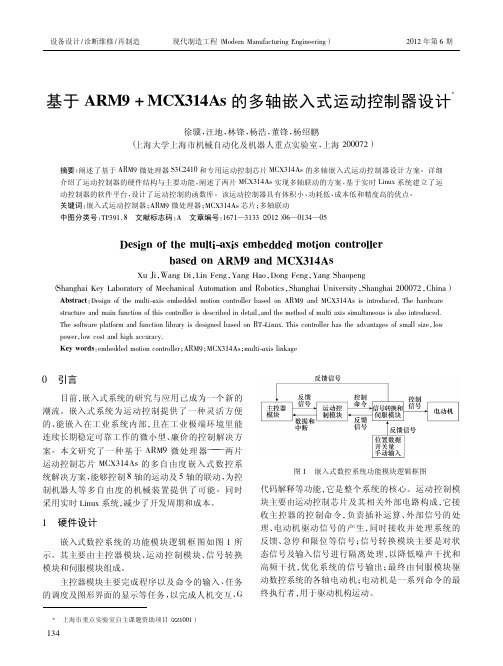
CAN ¡¢£ RS232 ¡¢£¤ ¡¢£¤¥ SRAM Flash 240¡128 ¡¢£¤ ¡¢£¤ ¡¢ LED ¡¢£ ¡¢£
给伺服驱动器 "驱动机械部件形成期望的运动 ’
A1-3 A0-2 LPC 2292 D0-15 D0-15 ¡¢£ P0.17 BusyN EINT0 INTN
OUT0-3 16M CLK ¡¢ ¡¢ ResetN ¡¢ EMGN ¡¢£ LED ¡¢
;F$ 软件系统 !"#$$%$ 要完成通信ห้องสมุดไป่ตู้)人机交互 )运行控制算法产 生控制指令 )2#E-/;5 的读写操作等多任务 ’ 在控制 器中嵌入实时 多任务 !#DB+766 操作 系统给软件 系 统
¡ 1 ¡¢£¤¥¦§¨©ª«¬
!"#$$%$ 外部 &’()* 存储器可 用于存储需 要固化 的运动控制参数 ( 如轨迹坐标 ) 运动参数 $’ &’()* 存储 器 采 用 ++,-%.&/01 ($23 $"+452 采 用 6+0/!. 7 $80/05! (8/$93$" 液晶模块采用 +2:$;1/$<5’ 为便
CS2 OE WE
CSN RDN WRN
XPP/XPM ECA/ECB/IN2 MCX ¡¢/¡¢ 314A IN0-1¡3 OUT4-7
26LS31 26LS32 ¡¢£ ¡¢£ ULN2003
#5CD#52 系 统 融 合 ’ 542 控 制 器 可 方 便 地 把 #5CD #52 系 统 产 生 的 :)2 数 控 代 码 直 接 转 换 成 2#E-/;5 的命令 ’ 2#E-/;5 执行命令 " 产生控制脉冲
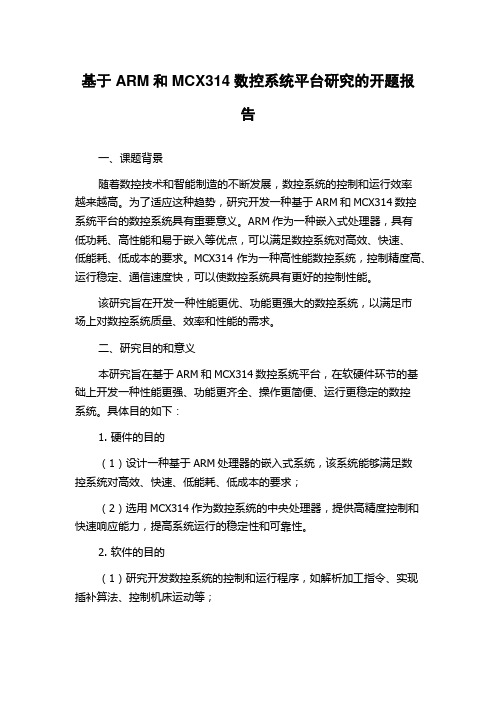
设计带来便利 " 移植的技术细节参见文献 ’ 下 面主要 讨论 2#G 对 2#E-/;5 的控制 ’ 操作 2#E-/;5 对于程序设计来说就是按一定的 时序读写其内部的寄存器 ’2#E-/;5 可 *写 + 的寄存器 有 ! 命 令 寄 存 器 H41" 模 式 寄 存 器 H4/I-" 输 出 寄 存 器 H4;" 插补模式 寄 存 器 H48" 数 据 寄 存 器 H40 "J, 可 * 读 + 的 寄 存 器 有 ! 主 状 态 寄 存 器 441 " 状 态 寄 存 器 44/"8"数据寄存器 440"J’
% 西南科技大学 & 余 张 国
李众立 李磊民
Yu ,Zhangguo Li,Zhongli Li,Leiming
摘 要 #!"# 处 理 器 是 业 界 领 先 的 低 功 耗 ’ 低 成 本 ’ 高 性 能 $% 位 嵌 入 式 "&’( 微 处 理 器 $ #()$*+, 是 + 轴 $ 联 动 专 用 -’. 运 动 控 制 芯 片 ( 文 中 提 出 以 ,"/ 微 控 器 0.(%%1% 对 /()$*+, 进 行 控 制 的 嵌 入 式 运 动 控 制 器 方 案 $ 论 述 了 控 制 器 硬 件 和 软 件 系 统 的 构 成 $ 给 出 了 运 动 控 制 器 在 )2 两 轴 数 控伺服工作台控制中的应用实例) 关键词 # 运动控制 * 微控器 * 数控 中图分类号 #!"#$% 文献表示码 #& 文章编号 ’())*+),-)./)),01+#+))-2+)%
542 处理器将 6DB 端口和存储器统一编址 " 可将 2#E-/;5 接 于 !"#$$%$ 的 3(KL$ 存 储 器 组 M 地 址 范 围 是 1N<$11O1111 I1N<$PPOPPPPQ " 即 将 #+$ 作 为 2#E-/;5 的 片 选 信 号 " 那 么 H41 和 441 的 地 址 是 1N<$11O1111" 记为 5RRS ’ 那么 "H4/ 和 44/ 的地址是 5RRST$" 依此类推 "H4J 和 44J 的地址是 5RRST1N1U’ 为了使 !"#$$%$ 提供 /0 位的总线接口 " 需要在其启 动 代 码 中 设 置 "6=+@!$ V 1N1P</;%/;O 3#&:$ V 1N/111PPUP’ 图 $ 是 2"G 操作 2#E-/;5 的流程图 ’ 文献提供了基于 # 语言的示例程序 " 但 542 开 发套件 5C+/F$ M#WRUH(SSXWS PWS 542 CUYU’WZUS +[X\UQ 没有提供 W[\Z] 和 XKZ] 函数 ’ 下面提供这两函数的源 代码 "这样 "文献的程序可方便地移植到 542 中 ’ YWXR W[\Z]M[K)X^KUR XK\ (RRSO [K)X^KUR )*WS\ R(\(Q _ YW’(\X’U [K)X^KUR )*WS\ ‘Z\Sa Z\SVMYW’(\X’U [K)X^KUR )*WS\ ‘Q(RRSa ‘Z\SVR(\(a b [K)X^KUR )*WS\ XKZ]M[K)X^KUR XK\ (RRSQ _ YW’(\X’U [K)X^KUR )*WS\ ‘Z\Sa Z\SVMYW’(\X’U [K)X^KUR )*WS\ ‘Q(RRSa SU\[SK ‘Z\Sa b
电话 #010-62132436 $62192616 %T/F & ! P LC 技术应用 200 例 "
/ DEH%(I& 的 主 要 功 能
/()$*+, 是日本 OPQ, 公司推 出的 + 轴运动 控
制专用 -’. 集成电路 $ 能用于步进电机或脉冲型伺服 驱 动 的 位 置 ’速 度 和 插 补 控 制 $可 用 于 工 业 自 动 化 设 备 ’工 业 机 器 人 ’测 量 设 备 ’办 公 设 备 和 家 用 电 器 等 ) 其可以进行各轴 R) 轴 ’2 轴 ’S 轴 ’B 轴 T 独立的定位控 制 ’速 度 控 制 $也 可 在 + 轴 中 选 择 任 意 的 % 轴 作 圆 弧 插补 ’%U$ 轴作直线插补 $ 插补精度是 !VJW0’X) 默认输 入时钟为 *Y/Z[$ 脉冲输出速度最高可达 +/..’ $ 输 出脉冲范围为 $% 位 ) 余张国 ’ 讲师 西南科技大学青年基金资助项目 %N9)M%)/% &
态寄存器和模式寄存器而实现 ) 各轴都有 $% 位 的逻 辑位置计数器 % 对输出的驱动脉冲计数 &’ 实际 位置计 数器 % 对外部编码器计数 & 和比较寄存器 $ 实现 位置的 闭环控制 ) 各轴都有 + 个通用输入 % 可用于限位 ’ 原点 信号输入 & 和 +U\ 个通用输出 )
技 术 创 新
M 运动控制器的基本构成
+J* 硬件系统 ,"/ 微 控 制 器 0.c%%1% 通 过 *Y 位 数 据 总 线 与 /c)$*+, 相连 $ 如图 * 所示 ) 0.c%%1% 的 AUP 运行电 压是 $J$Q 的 % 但能承受 WQ 电平 &$ 而 /c)$*+, 是 WQ 电压的 $ 两者互连时 $可串入 *M! 电阻 ) 应用实践表明 0.c%%1% 和 /c)$*+, 直接相连也是可行的 ) 两 者互 连后 $ 且将 /c)$*+, 的 f).0’O 引脚 ’Z*Y0\ 引脚 ’ Nf’NO 引 脚 接 "WQ 电 压 $"f’fNO 引 脚 连 接 低 电 平 复 位电路 $(0g 引脚接 *Y/ 有源晶振时钟 $Q‘‘ 引脚接 上 "WQ 电源 $/()$*+ 就具备了最基本的运行条件 ) 微 控器就可通过外部存储器接口 $ 对 /()$*+, 进行读
您的论文得到两院院士关注
中 文 核 心 期 刊 ! 微 计 算 机 信 息 " ( 嵌 入 式 与 SOC)2005 年 第 21 卷 第 9-2 期
基于 !"# 和 $%&’()* 的嵌入式运动控制器
! "#$%&&%& ’()*(+ ,(+)-(..%- /*)0 !1’ ’,2 3+& ’,4567!
写操作 $ 实现相应的功能 ) 图 * 中虚线框内表示 + 轴中的某一轴的接口) )..U)./ 引 脚 工 作 在 (eU((e 模 式 时 输 出 正 U 反 驱 动 脉冲 $ 在脉冲 U 方向模 式 时 输 出 驱 动 脉 冲 和 方 向 信 号 ) f(,Uf(XUAOV 接收编码器的反馈输入 ) ,/%Y0’$* 是 + 路 差 动 线 驱 动 器 $ ,/%Y0’$% 是 + 路 差 动 线 接