路面输入及其模型
两后轮驱动的电动轮汽车的动力学建模与仿真分析

No. 2CN 11-5904/U J Automotive Safety and Energy, 2010, Vol. 1 158—162电动轮汽车由于在驱动轮处采用电动轮技术而实现了多电机驱动,代替了传统电动汽车的中央驱动方式。
一般地,电动轮指电机到所驱动的车轮之间的所有部件,最简单的结构就是将电机与车轮组合成为一个整体。
电动轮驱动方式的优点在于,取消了传统汽车的传动轴和差速器等部件,使传动系统简化,不仅可以提高传动效率,而且有利于整车布置,提高车辆的通过性能,非常有利于低地板大客车和军用车辆的设计;由于减速装置布置在车轮附近,而且采用多个电动轮驱动,可以降低车辆对电气系统和机械传动零部件的要求,适合传递大转矩,非常适合于在大型矿用汽车上应用。
2002年,美国通用汽车提出了线控四轮驱动燃料电池概念车Autonomy,2005年推出后轮采用电动轮驱动的燃料电池电动车Sequel,2003年丰田汽车公司在东京国际车展上展示了四轮驱动燃料电池车Fine-S,2006年4月在美国纽约汽车展上又推出四个电动轮驱两后轮驱动的电动轮汽车的动力学建模与仿真分析陈 勇1,陆中奎2,周秋丽1(1.北京信息科技大学,北京 100192;2. 北京福田汽车股份有限公司,北京 102206)摘 要:为分析电动轮汽车的非悬挂质量增加对行驶平顺性、操纵稳定性的影响,建立了两后轮驱动的电动轮汽车整车的11自由度动力学模型。
在MATLAB/Simulink环境下,建立了整车仿真分析模型,采用模拟的路面谱作为路面输入,可实现不同车辆参数、不同控制策略和不同分析目标的仿真,也可分析车轮与路面之间的动载荷、悬架变形和车身姿态(俯仰、侧倾和横摆)的变化。
分析结论对电动轮汽车的开发、悬架的改进以及控制策略的确定具有参考意义。
关键词: 电动汽车;电动轮;控制策略;平顺性;操纵稳定性中图分类号: U469.72Dynamic modeling and simulation analysis of an electricvehicle with two rear hub-motorsCHEN Yong1, LU Zhongkui2, ZHOU Qiuli1(1. Beijing Information & Science Technology University, Beijing 100192, China;2. Beiqi Fonton Motor Co. Lts, Beijing 102206, China)Abstract: An 11 degree-of-freedom dynamic model was constructed for an electric vehicle driven with two rear hub-motors to analyze the infl uence on ride quality and the handling characteristics of unsprung mass increase. A full vehicle simulation model was developed using the MATLAB/Simulink with a simulated road model as input. The simulation model can realize the varies simulations with different vehicle parameters, control strategies and analyzing goals, while it can also determine the changes of dynamic load on tires, suspension defl ection and attitude (including pitch, roll and yaw). The above analyzed conclusions can enhance the development of electric vehicle driven by hub-motors, while they support the design of suspension and control strategies.Key words: electric vehicle; hub-motor; control strategy; ride quality; handling characteristics收稿日期:2010-01-22基金项目:辽宁省科学技术计划项目(2008220025);辽宁省高等学校优秀人才支持计划项目(RC-05-12)作者简介:陈勇(1966—),男(汉族),辽宁,教授。
(完整word版)基于Matlab的汽车主动悬架控制器设计与仿真
《现代控制理论及其应用》课程小论文基于Matlab的汽车主动悬架控制器设计与仿真学院:机械工程学院班级:XXXX(XX)姓名:X X X2015年6月3号河北工业大学目录1、研究背景 (3)2、仿真系统模型的建立 (4)2.1被动悬架模型的建立 (4)2.2主动悬架模型的建立 (6)3、LQG控制器设计 (7)4、仿真输出与分析 (8)4.1仿真的输出 (8)4.2仿真结果分析 (11)5、总结 (11)附录:MATLAB程序源代码 (12)(一)主动悬架车辆模型 (12)(二)被动悬架车辆模型 (14)(三)均方根函数 (15)1、研究背景汽车悬架系统由弹性元件、导向元件和减振器组成,是车身与车轴之间连接的所有组合体零件的总称,也是车架(或承载式车身)与车桥(或车轮)之间一切力传递装置的总称,其主要功能是使车轮与地面有很好的附着性,使车轮动载变化较小,以保证车辆有良好的安全性,缓和路面不平的冲击,使汽车行驶平顺,乘坐舒适,在车轮跳动时,使车轮定位参数变化较小,保证车辆具有良好的操纵稳定性。
(a)被动悬架系统(b)半主动悬架系统(c)主动悬架系统图1 悬架系统汽车的悬架种类从控制力学的角度大致可以分为被动悬架、半主动悬架、主动悬架3种(如图1所示)。
目前,大部分汽车使用被动悬架,这种悬架在路面不平或汽车转弯时,都会受到冲击,从而引起变形,这时弹簧起到了减缓冲击的作用,同时弹簧释放能量时,产生振动。
为了衰减这种振动,在悬架上采用了减振器,这种悬架作用是外力引起的,所以称为被动悬架。
半主动悬架由可控的阻尼及弹性元件组成,悬架的参数在一定范围内可以任意调节。
主动悬架是在控制环节中安装了能够产生上下移动力的装置,执行元件针对外力的作用产生一个力来主动控制车身的移动和车轮受到的载荷,即路面的反作用力。
随着电控技术的发展,微处理器在车辆中的应用已经日趋普遍,再加上作动器、可调减振器和变刚度弹簧等重大技术的突破,使人们更加注对主动悬架系统的研究。
车辆四轮相关路面非平稳随机输入通用时频模型

摘 要 :车辆非匀速行驶时路面的随机输入模型是汽车非平稳动力学分析研究的重要基础。首先应用等效协方
差 方 法 建 立 了 单 轮 随 机 输 入 非 平 稳 时 域 模 型 。根 据 时 间 一空 间 一 、 阶微 分 关 系 , 功 地 解 决 了 前 后 轮 变 时 差 相 关 的 问 二 成
由式 ( ) ( ) 3 、4 得到 空 间频率 响应 函数 日( ) : 为
日( )= —r yS ( o 2 n /q n )  ̄o ( 5 )
由方 程 ( ) 出单轮 路面 不平 度 的微 分方 程 : 5推
q()+ q()=2 n  ̄ 。n) s s s 竹 。 / (。W() () s 6
E [
协方差 等效 。
人行道路面结构模型

人行道路面结构模型
人行道的路面结构模型包括以下几个主要部分:
1.路面基层:人行道路面的基层是指路面的地面层,一般由
河砂、碎石等材料构成,厚度一般在1525厘米之间。
基层的
主要作用是为上层结构提供承载力和稳定性。
2.路面面层:路面的面层是指人行道最上面的覆盖层,一般
由水泥混凝土、沥青混凝土等材料构成。
面层的厚度可以根据
人行道的使用频率和环境要求进行设计,一般在510厘米之间。
面层能够提供平整、耐磨、防滑等性能,确保人行道的安全和
舒适性。
3.路缘石:路缘石是人行道路面与车行道之间的分界带,一
般由混凝土材料构成。
它的主要作用是保护人行道的面层和边
坡的完整性,同时也起到引导行人流动和防止车辆侵入人行道
的作用。
4.排水系统:人行道路面的排水系统是为了排除降雨、融雪
等水分,以保持路面的干燥和安全。
一般包括雨水口、排水管
道和排水井等组成部分。
5.边坡结构:人行道路面的边坡是指路面两侧的斜坡,用于
过渡连接人行道路面和周围的地面。
边坡的设计需要考虑土质
稳定性、排水和抗冲刷等因素,以确保人行道的稳定和安全。
6.隔离设施:人行道路面的隔离设施主要用于保护行人的安全,防止车辆侵入人行道。
常见的隔离设施包括护栏、防护墙、路缘石等。
这些设施需要根据人行道的使用环境和要求进行设
计和安装。
人行道的路面结构模型需要考虑到人行道的使用频率、设计
标准和环境要求等因素,以确保人行道的安全、舒适及持久性。
civil3d 学习指南 8 道路模型
道路模型道路模型是Civil 3D 2007中的最新的强大功能。
它能够设计公路、铁路、沟渠、桥梁或其它任何与曲面关联设计的地物。
首先创建曲面、路线和纵断面,然后才能创建道路模型。
就像Civil 3D 2007中的其它对象一样,如果您修改了与道路关联的曲面,或是编辑了路线或纵断面,道路模型自身也会动态更新。
道路建模中的核心设计内容是装配。
装配是指道路的典型横断面,是由相互连接的部件所组成。
装配被铺设到路线上指定的里程范围。
使用附加的路线定义,也可以设计水平过渡段或者道路上附属的内容,例如中间带。
如果为路线指定了超高数据,那么当装配被铺设到路线上时,它也可以进行超高。
部件是组成装配的基本成分。
它包括点、连接和造型代码,它们定义了道路模型中的抽象数据:点代码可以输出成点,连接定义了造型之间的平面,而造型表示封闭的轮廓,并且可以单独计算各自的体积(例如缘石、路面等)。
从技术上来讲,它们是通过VBA代码而创建的。
但是Autodesk提供了大量的缺省代码来涵盖多种领域。
并且在这些种类繁多的部件中可以设定宽度、高度、坡度等参数。
一旦道路对象被创建了,您就可以从它生成曲面、把模型中的要素线输出为路线或多段线,或者输出模型中指定位置的点。
同时也可以使用道路横断面工具来查看您的设计。
要了解关于创建部件的更多信息,请参阅Autodesk Civil 3D 2007帮助文件中的文档:Autodesk Civil 3D 2007 Subassembly Help 和Creating Subassemblies 。
部件目录在Civil 3D 2007中,提供了预定义的部件库,并且使用目录进行分类管理。
(您可以从6_Profile Complete.dwg开始工作)1.确认选中菜单“常规> 工具选项板窗口”,工具空间选项板上已经放置了常用的一些道路部件。
2.在菜单“常规> 目录”,打开“道路建模目录(公制)”,其中包含更多的装配内容,这里您可以看到多种预定义的部件类别。
5.4 路面不平度统计特性
其中: 、输出谱矩阵的对角线元素为输出信号的自功率谱。 其中:1、输出谱矩阵的对角线元素为输出信号的自功率谱。对 输出信号的自功率谱进行积分才能得到输出信号的均方值。 输出信号的自功率谱进行积分才能得到输出信号的均方值。 2、频率响应函数的谱矩阵中,各元素分别为单输入系统的频响函 、频率响应函数的谱矩阵中,各元素分别为单输入系统的频响函 单输入系统 求解此频响函数时,可令其它输入信号为0。 数,例如 H z ~ q ( f ) ,求解此频响函数时,可令其它输入信号为 。
5.4 路面不平度统计特性
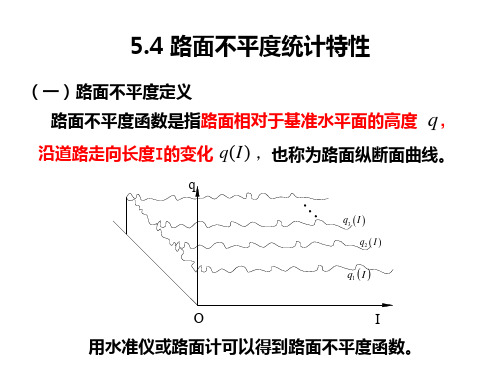
(一)路面不平度定义 路面不平度函数是指路面相对于基准水平面的高度 路面不平度函数是指路面相对于基准水平面的高度 q , 沿道路走向长度I 沿道路走向长度I的变化 q ( I ) ,也称为路面纵断面曲线。 也称为路面纵断面曲线。 也称为路面纵断面曲线
q
q3 ( I )
q2 ( I )
双对数坐标系
2)空间频率下路面不平度的速度功率谱和加速度功率谱 空间频率下路面不平度的速度功率谱和加速度功率谱 由不平度函数q(I 对纵向长度 对纵向长度I 由不平度函数 I)对纵向长度I的一阶导数和二阶导 可得空间频率的速度功率谱和加速度功率谱。 空间频率的速度功率谱和加速度功率谱 数,可得空间频率的速度功率谱和加速度功率谱。
∆f = u∆n
对车辆平顺性有效的路面波长 通常在 0.35m < λ < 91m
−1 0.011 −1 即频率: m < n < 2.83m 即频率:
思考:有效的路面波长如何确定? 思考:有效的路面波长如何确定? 常用车速:36~ 常用车速:36~108km/h u=10~ 即u=10~30m/s 所以,可以保证时间频率范围 所以,可以保证时间频率范围 保证 0.33~28.3Hz, 0.33~28.3Hz,其覆盖车身质量部 分的固有频率1 2Hz和车轮质量部 分的固有频率1~2Hz和车轮质量部 分固有频率10~15Hz。 分固有频率10~15Hz。 10
汽车理论第6章 汽车的平顺性2016

16
a(t)
aw(t)
加权函数w(f )的滤波网络 根据IS02631-1:1997(E)设定系数
2016/4/12
汽车理论 wangjx@
四、平顺性的评价方法
(一)基本的评价方法
2. 对记录的加速度时间历程 间 程a(t)进行频谱分 行 谱 析得到功率谱密度函数 Ga f
汽车理论 Automotive theory
第六章
汽车的平顺性
内容概要
平顺性的基本概念 路面不平度输入 人体对振动的反应以及平顺性评价方法 平顺性研究基本方法、两自由度振动系 平顺性研究基本方法 两自由度振动系 统 主动悬架(了解)
2016/4/12
汽车理论 wangjx@
11
靠背
脚
2016/4/12
汽车理论 wangjx@
三、人体对振动的反应
人体对不同频率的振动敏感程度不同 1.
zs 最敏感的频率范围是4~12.5Hz
在4~8Hz频率范围,人的内脏器官产生共振 频率范围 人的内脏器官产生共振 8~12.5Hz频率范围,对人的脊椎系统影响很大
2016/4/12 汽车理论 wangjx@
wi是功率谱密度为0.1的 白噪声 (Simulink Si i 中的缺省值)
7
二、路面不平度输入
nc =0.01(cycle/m),车速为20m/s
10 10 10 10 10 10 10
-2 -3 -4 -5 -6 -7 -8
评价方法: 评价方法
根据乘员舒适程度评价
2016/4/12 汽车理论 wangjx@
4
5、路面状况评价指标、检测方法和预估模型(举例说明)
5、路面状况评价指标、检测方法和预估模型(举例说明)。
1)评价指标分为综合性指标和单一性指标两大类综合性指标是对路面使用性能的综合测度,优点是能反映路面总体状况,指标单一,便于比较;缺点是不能确切反映使用性能的局部特征,不便于诊断原委和制定具有针对性的对策。
单一性指标是对路面使用性能诸多局部特征的具体测度,它可以采用多项指标明确地表征路面使用性能各组分的详细情况。
《公路技术状况评定标准》在路面使用性能评价中采用了综合指标和单一指标相结合的方法。
对不同类型的路面,采用了不同的分项技术指标。
其中,沥青路面采用了路面损坏、道路平整度、路面车辙、抗滑性能和结构强度五项技术指标;水泥混凝土路面采用了路面损坏、道路平整度和抗滑性能三项技术指标;砂石路面只采用了路面损坏一项技术指标。
路面使用性能指数(PQI)反映路面的整体使用性能PQI=WPCI PCI+WRQIRQI+WRDIRDI+WSRISRIwPCI 路面损坏(PCI)的权重;wRQI 道路平整度(行驶质量,RQI)的权重;wRDI 路面车辙(RDI)的权重;wSRI 路面抗滑性能(SRI)的权重。
权重与公路等级和路面类型有关。
2)检测方法(1)路面破损检测方法:高速摄影车或其他高效测试设备测试,人工检测(目测或用量尺测)(2)路面平整度的检测方法有:3米直尺法,连续式平整度仪,车载式颠簸累积仪、车载式激光平整度仪;(3)路面车辙测定方法:路面横断面仪法、横断面尺法、激光或超声波车辙仪;(4)路面抗滑性能测定方法:手式铺砂法,电动铺砂仪,激光构造深度仪,摆式仪,磨擦系数测定车测定路面横向力系数。
(5)路面结构强度测定方法:贝克曼梁测,自动弯沉仪,落锤式弯沉仪;3)预估模型(1)路面损坏状况(PCI)包括裂缝、坑槽、沉陷和松散等各种表面破坏和损伤。
路面表面各种类型的损坏通过其对路面使用性能的影响程度加权累积计算换算损坏面积,换算损坏面积与调查面积之比(路面破损率),可直接用来衡量路面的损坏状态,也可通过路面损坏状况指数(PCI)来评价路面表面的技术状况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.1.2 傅里叶分析
前面讨论的概率密度、均值、方差等是用 来在幅值领域里描写随机过程的。 而相关函数则是在时域里研究问题。除此 之外,还需要在频域里研究随机过程,这就 要用到傅里叶分析手段。
傅立叶的两个最主要的贡献——
• “周期信号都可表示为谐波关系的正 弦信号的加权和” ——傅里叶的第一个主要论点 • “非周期信号都可用正弦信号的加权 积分表示” ——傅里叶的第二个主要论点
∫
t 0 + T1
t0
f ( t ). dt
周期函数的频谱
• 周期信号的谱线只出现在基波频率的整数倍的频率处。 直观看出:各分量的大小,各分量的频移。
Cn
ϕ n (ω )
ω1
nω 1
ω1
nω 1
周期函数的复指数级数形式傅里叶级数
三角函数式 f1 (t ) = a0 + ∑ (an cos nω1t + bn sin nω1t )
随机过程
2 随机过程的数字特征
随机过程既是一个随机变量系,显然就可以 用描述随机变量系的办法来描述随机过程。 例如,可以用一维二维乃至n维的分布函数 或概率密度来描述。 在实际应用中,要确定随机过程的分布函数 族十分困难,甚至不可能。因而,有必要像随 机变量一样,引入描述随机过程的数字特征。
n =1 ∞
由欧拉公式 得 其中
e jnω1t − e− jnω1t sin nω1t = 2j
e jnω1t + e− jnω1t cos nω1t = 2j
f (t ) =
n = −∞
∑
∞
F ( n ω 1 ) e jn ω 1t
F ( 0) = a 0
1 F(nω1) = (an − jbn ) 2
路面的不平会给汽车输入振动或冲击, 使汽车产生振动,在经典动力学中把路面 不平度简化为一个三角函数,如正弦函数 来加以讨论,这与真实路面情况出入较大。 六十年代开始,随机振动理论得到发 展,给路面不平度的研究带来了新的方法 和新的思路。
第4章 路面及其模型
4.1 路面不平的统计描述 4.2 路面的统计特性 4.3 路面不平度时域的数值模拟
t1时刻对数学期望的偏离程度。
随机过程的二维数字特征 (3) 自相关函数 均值和方差是刻划随机过程在各个孤立时 刻统计特性的重要数字特征。 不能描述随机过程两个不同时刻状态之间 的联系。例如两个随机过程可以具有相同的 均值和方差,但却有完全不同的内部结构。 需要利用二维概率密度引入新的数字特征。
1
∞
jnω1t
1 ~ − jnω1t F(nω1) = ∫ T1 f (t).e .dt T1 − 2
T 1 2
F ( n ω 1 ).
傅立叶 变换
2π
T1 → ∞
=
ω1
∫
∞
−∞
f ( t ).e
− jn ω 1t
.dt
F (ω ) = ∫
∞
−∞
f (t ).e
− jω t
dt
傅立叶的逆变换
∞ ~ f (t ) = ∑ F ( nω1 ).e jnω1t n = −ω
频率也变成连续变量
2π ω1 = → 0 → dω T1
nω1 → ω
频谱演变的定性观察
2π ω1 = T1
F (nω1 )
-T/2
T/2
F ( nω1 )
ω1
F(nω 1)
ω1
-T/2
T/2
−∞
∞
−
2π
2π
τ
τ
从周期信号FS推导非周期的FT
~ f (t ) =
n =−
F (nω ).e ∑ ω
各态历经随机过程
1 a = x (t ) = lim T →∞ T
∫
T /2
−T / 2
x (t )dt
1 R (τ ) = x (t ) X (T + τ ) = lim T →∞ T
∫
T /2
−T / 2
x (t ) X (T + τ )dt
“各态历经”的含义:随机过程中的任一实现都经历了随 机过程的所有可能状态。 因此,无需获得大量用来计算统计平均的样本函数,而只 需从任意一个随机过程的样本函数中就可获得它的所有的 数字特征,从而使“统计平均”化为“时间平均”,使实 际测量和计算的问题大为简化。 即各态历经随机过程,其集合平均的数字特征不随时间变 化,且与任意样本时间平均的数字特征相同。
图4-3 随机过程
¾ 随机过程的数学定义: ¾ 设随机试验E的可能结果为x(t),试验的样本 空间S为{x1(t), x2(t), …, xn(t),…}, xi(t)是第i 次试验的样本函数或实现,每次试验得到一 个样本函数,所有可能出现的结果的总体就 构成一随机过程,记作X(t)。 ¾ 两层含义: 随机过程X(t)在任一时刻都是随机变量; 随机过程X(t)是大量样本函数的集合。
• 设x(t)是零均值的随机信号,且x(t) 中无周期性分 量,其自相关函数 Rx (τ → ∞ ) = 0 ,自相关函数满足
富立叶变换条件 ∫−∞ Rx (τ ) dτ < 0
∞
• 工程中对信号进行隔直 处理,使 μ x = 0 。 • 对于含有周期成分的信 号,用窗函数(window function)截断,使 得 τ ≠→ ∞ 。
随机过程称为平稳随机过程。
平稳过程的数字特征有如下的性质:
3.
平稳过程的任一个状态的均值、均方值都相等。两个状 态之间的相关函数仅仅是两个状态之间的时差τ 的函数。 一维分布与时间t无关, 二维分布只与时间间隔τ有关。
4.各态历经性
平稳随机过程在满足一定条件下有一个有趣而又 非常有用的特性, 称为“各态历经性”。 若平稳随机过程的数字特征(均为统计平均)完 全可由随机过程中的任一实现的数字特征(均为时 间平均)来替代,则称平稳随机过程具有“各态历 经性”。
∞ F (nω ) ∞ F(ω) ~ jnω1t 1 f (t ) = ∑ .e .ω1 = ∑ .e jnω1t .Δ(nω1) ω1 n=−∞ nω1=−∞ 2π
傅立叶 逆变换
T1 → ∞ ω1 → 0 nω1 → ω Δ(nω1 ) → dω ∞ 2π ∞ Δω = = ω1 F(nω1) →F(ω) → ∑ ∫− ∞ T1
(4) 互相关函数
3.平稳随机过程 在实际问题中,经常会碰到这样一类随机过程:
如河水的流动,总是在某一平均值周围连续地随机波动, 且其振幅、振动特性在时间增长过程中,基本保持不变。这 样的过程称之为平稳随机过程,简称为平稳过程。 一般来说,动力学系统的随机过程一开始是不平稳的,即 所谓过渡过程。当过渡过程消失,转入稳定状态以后,即可 认为是平稳随机过程。统计特性不随时间的推移而变化的
∞ −∞
f (t ).e − jω t dt = F (ω ) e jϕ (ω )
由欧拉公式得:
F (ω ) = ∫
∞
−∞
f (t )(cos ω t − j sin ω t ) dt
实部Re(ω)为偶函数,虚部Im (ω)为奇函数
4.1.3 随机信号的功率谱密度
在很多问题中,常需要利用傅里叶变换这一工具 来确立时间函数的频率结构。但一个时间函数 x(t),-∞<t<+∞的傅里叶变换是否存在,取决于 能否满足
1 F(−nω1) = (an + jbn ) 2
引入了负频率
周期复指数信号的频谱图
F
n
0
ω
nω
1
Fn
nω 1
1
1
0
ω
指数形式的傅里叶级数的系数
F(nω1) = Fn
1 Fn = T1
∫
t 0 + T1
t0
f (t ) e
− jn ω 1 t
dt
两种傅氏级数的系数间的关系 F0 = c0 = a0 1 jϕ n Fn = Fn e = (an − jbn ) 2 1 − jϕ n F−n = F−n e = (an + jbn ) 2
路面不平给予汽车系统的激励是一种随 机过程,汽车的振动也是随机的,即在同 一条路面上测量其振动幅值与频率,各次 试验结果都不同,而且在试验之前无法预 测其试验结果,其振幅、速度、加速度均 为非确定函数。 随机振动服从概率统计规律,只能应用 概率统计理论来进行描述。
4.1 路面不平的统计描述 4.1.1 随机过程 4.1.2 傅里叶分析 4.1.3 功率谱密度
4.1.1 随机过程 1. 随机过程概念 2. 随机过程的数字特征 3. 平稳随机过程 4. 各态历经性
4.1.1 随机过程
1 随机过程概念 自然界中,事物的变化过程,可以分为两 大类。 一类变化过程是一个确定性的,可以用 确定性函数加以描述。 一类过程,没有确定的变化,没有必然 的变化规律,也不能用确定的函数加以描 述,这样的变化过程叫做随机过程。
∫
∞
−∞
x(t ) dt < ∞
即绝对可积
如能满足,则其傅里叶变换存在。
随机信号是时域无限信号,不具备可积分条件, 因此不能直接进行傅里叶变换。 随机信号的频率、幅值、相位都是随机的,因此 从理论上讲,一般不作幅值谱和相位谱分析,而 是用具有统计特性的功率谱密度(power spectral density)来作谱分析。 自功率谱密度函数(Auto-power spectral density function) 互功率谱密度函数(cross-power spectral density function) 相干函数(coherence function)与频率响应函数 (frequency response function)
n = −ω