A星算法及其应用
a星算法求解八数码问题python
a星算法求解八数码问题python一、介绍八数码问题是一种经典的智力游戏,也是人工智能领域中的经典问题之一。
在这个问题中,有一个3×3的棋盘,上面摆着1至8这8个数字和一个空格,初始状态和目标状态都已知。
要求通过移动数字,将初始状态变换成目标状态。
其中空格可以和相邻的数字交换位置。
为了解决这个问题,我们可以使用A*算法。
本文将详细介绍如何用Python实现A*算法来求解八数码问题。
二、A*算法简介A*算法是一种启发式搜索算法,常用于寻找最短路径或最优解等问题。
它基于Dijkstra算法,并加入了启发式函数来加速搜索过程。
在A*算法中,每个节点都有两个估价值:g值和h值。
g值表示从起点到该节点的实际代价,h值表示从该节点到目标节点的估计代价。
启发式函数f(n) = g(n) + h(n) 表示从起点到目标节点的估计总代价。
A*算法采用优先队列来保存待扩展的节点,并按照f(n)值从小到大排序。
每次取出队头元素进行扩展,并将扩展出来的新节点按照f(n)值插入队列中。
当扩展出目标节点时,算法结束。
三、八数码问题的状态表示在八数码问题中,每个状态都可以表示为一个3×3的矩阵。
我们可以用一个一维数组来表示这个矩阵,其中0表示空格。
例如,初始状态可以表示为[2, 8, 3, 1, 6, 4, 7, 0, 5],目标状态可以表示为[1, 2, 3, 8, 0, 4, 7, 6, 5]。
四、A*算法求解八数码问题的步骤1.将初始状态加入优先队列中,并设置g值和h值为0。
2.从队头取出一个节点进行扩展。
如果该节点是目标节点,则搜索结束;否则,将扩展出来的新节点加入优先队列中。
3.对于每个新节点,计算g值和h值,并更新f(n)值。
如果该节点已经在优先队列中,则更新其估价值;否则,将其加入优先队列中。
4.重复第2步至第3步直到搜索结束。
五、Python实现以下是用Python实现A*算法求解八数码问题的代码:```import heapqimport copy# 目标状态goal_state = [1,2,3,8,0,4,7,6,5]# 启发式函数:曼哈顿距离def h(state):distance = 0for i in range(9):if state[i] == 0:continuerow = i // 3col = i % 3goal_row = (state[i]-1) // 3goal_col = (state[i]-1) % 3distance += abs(row - goal_row) + abs(col - goal_col)return distance# A*算法def A_star(start_state):# 初始化优先队列和已访问集合queue = []visited = set()# 将初始状态加入优先队列中,并设置g值和h值为0heapq.heappush(queue, (h(start_state), start_state, 0))while queue:# 取出队头元素进行扩展f, state, g = heapq.heappop(queue)# 如果该节点是目标节点,则搜索结束;否则,将扩展出来的新节点加入优先队列中。
a星算法 贝塞尔曲线平滑处理

a星算法贝塞尔曲线平滑处理
A*算法(A-star algorithm)是一种常用于图搜索和路径规划的算法。
它通过在图中沿着最有可能的路径搜索目标来找到最短路径。
贝塞尔曲线平滑处理(Bezier curve smoothing)是一种用于将曲线变得更加平滑的方法。
它使用贝塞尔曲线的特性,通过调节控制点来调整曲线的形状,从而实现平滑效果。
在路径规划中,可以将A*算法和贝塞尔曲线平滑处理结合起来,以使路径在地图中更加平滑和自然。
具体步骤如下:
1. 使用A*算法计算出起点到终点的最短路径。
2. 将最短路径的关键点作为贝塞尔曲线的控制点。
3. 通过调整控制点的位置和权重,使贝塞尔曲线与最短路径更好地拟合。
4. 使用贝塞尔曲线生成平滑路径,并将其作为最终路径。
这样做可以消除路径中的尖角和突变,使得路径更加平滑和易于理解。
同时,通过调整贝塞尔曲线的权重和控制点,还可以实现路径的进一步优化和调整,以适应具体的需求。
astar(a星)算法(精)
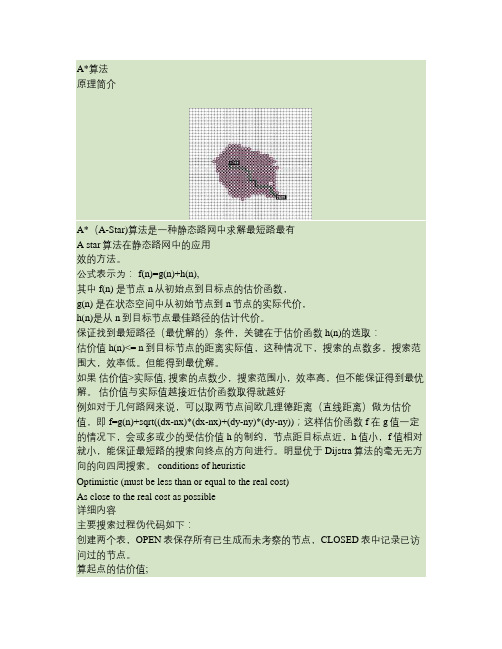
A*算法原理简介A*(A-Star)算法是一种静态路网中求解最短路最有A star算法在静态路网中的应用效的方法。
公式表示为: f(n)=g(n)+h(n),其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
估价值与实际值越接近估价函数取得就越好例如对于几何路网来说,可以取两节点间欧几理德距离(直线距离)做为估价值,即f=g(n)+sqrt((dx-nx)*(dx-nx)+(dy-ny)*(dy-ny));这样估价函数f在g值一定的情况下,会或多或少的受估价值h的制约,节点距目标点近,h值小,f值相对就小,能保证最短路的搜索向终点的方向进行。
明显优于Dijstra算法的毫无无方向的向四周搜索。
conditions of heuristicOptimistic (must be less than or equal to the real cost)As close to the real cost as possible详细内容主要搜索过程伪代码如下:创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
算起点的估价值;将起点放入OPEN表;while(OPEN!=NULL){从OPEN表中取估价值f最小的节点n;if(n节点==目标节点){break;}for(当前节点n 的每个子节点X){算X的估价值;if(X in OPEN){if( X的估价值小于OPEN表的估价值 ){把n设置为X的父亲;更新OPEN表中的估价值; //取最小路径的估价值}}if(X inCLOSE) {if( X的估价值小于CLOSE表的估价值 ){把n设置为X的父亲;更新CLOSE表中的估价值;把X节点放入OPEN //取最小路径的估价值}}if(X not inboth){把n设置为X的父亲;求X的估价值;并将X插入OPEN表中; //还没有排序}}//end for将n节点插入CLOSE表中;按照估价值将OPEN表中的节点排序; //实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。
A星算法中文详解

A星算法中文详解A*算法是一种图算法,用于找到从起始节点到目标节点的最短路径。
它是一种启发式算法,根据每个节点的估计成本来进行。
本文将详细介绍A*算法的原理、步骤和实现。
A* 算法的基本思想是在 Dijkstra 算法的基础上引入启发式函数,目的是在过程中尽量选择离目标节点更接近的路径。
启发式函数通常使用两个估计函数的和:g(n) 是从起始节点到当前节点的实际代价,h(n) 是当前节点到目标节点的估计代价。
通过评估 f(n) = g(n) + h(n) 的值,选择 f(n) 最小的节点作为下一步的节点。
这样,方向就会倾向于更接近目标节点的路径。
A*算法的步骤如下:1. 创建两个空集合:Open 集合和 Closed 集合。
Open 集合存储待考虑的节点,Closed 集合存储已经考虑过的节点。
2. 将起始节点添加到 Open 集合中,并初始化 g(n) 和 h(n) 的值。
3. 从 Open 集合中选择 f(n) 最小的节点作为当前节点,并将其移出 Open 集合,放入 Closed 集合中。
4.对当前节点的相邻节点进行遍历:- 如果相邻节点已经在 Closed 集合中,则忽略它。
- 如果相邻节点不在 Open 集合中,将其添加到 Open 集合,并计算g(n) 和 h(n) 的值。
- 如果相邻节点已经在 Open 集合中,计算经过当前节点到达相邻节点的 g(n) 值。
如果计算得到的 g(n) 值更小,则更新相邻节点的 g(n) 值。
5. 重复步骤 3 和 4,直到找到目标节点或者 Open 集合为空。
如果Open 集合为空且没有找到目标节点,则表示无法到达目标节点。
6.如果找到目标节点,可以通过回溯从目标节点到起始节点的路径。
路径上的节点可以通过每个节点的父节点指针找到。
以上就是A*算法的详细步骤。
A*算法的时间复杂度取决于启发式函数的选择和问题的规模。
通常情况下,A*算法的时间复杂度为O(b^d),其中b是分支因子,d是目标节点的最短路径长度。
启发式搜索A星算法
启发式搜索——初识A*算法A*在游戏中有它很典型的用法,是人工智能在游戏中的代表。
A*算法在人工智能中是一种典型的启发式搜索算法,为了说清楚A*算法,先说说何谓启发式算法。
一、何谓启发式搜索算法在说它之前先提提状态空间搜索。
状态空间搜索,如果按专业点的说法,就是将问题求解过程表现为从初始状态到目标状态寻找这个路径的过程。
通俗点说,就是在解一个问题时,找到一个解题的过程,应用这个过程可以从求解的开始得到问题的结果。
由于求解问题的过程中分支有很多,主要是求解过程中求解条件的不确定性、不完备性造成的,使得求解的路径很多,这样就构成了一个图,我们说这个图就是状态空间。
问题的求解实际上就是在这个图中找到一条路径可以从开始到结果。
这个寻找的过程就是状态空间搜索。
常用的状态空间搜索有深度优先和广度优先。
广度优先是从初始状态一层一层向下找,直到找到目标为止。
深度优先是按照一定的顺序,先查找完一个分支,再查找另一个分支,直至找到目标为止。
这两种算法在数据结构书中都有描述,可以参看这些书得到更详细的解释。
前面说的广度和深度优先搜索有一个很大的缺陷就是:他们都是在一个给定的状态空间中穷举。
这在状态空间不大的情况下是很合适的算法,可是当状态空间十分大,且不可预测的情况下就不可取了。
他们的效率实在太低,甚至不可完成。
在这里就要用到启发式搜索了。
启发式搜索就是在状态空间中搜索时,对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直至找到目标。
这样可以省略大量无谓的搜索路径,提高了效率。
在启发式搜索中,对位置的估价是十分重要的。
采用了不同的估价可以有不同的效果。
我们先看看估价是如何表示的。
启发中的估价是用估价函数表示的,如:f(n) = g(n) + h(n)其中f(n)是节点n的估价函数,g(n)是在状态空间中从初始节点到n节点的实际代价,h(n)是从n节点到目标节点最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
A星算法实验报告

A*算法实验报告一、实验原理A*算法,作为启发式算法中很重要的一种,被广泛应用在最优路径求解和一些策略设计的问题中。
而A*算法最为核心的部分,就在于它的一个估值函数的设计上:f(n)=g(n)+h(n)其中f(n)是每个可能试探点的估值,它有两部分组成:一部分为g(n),它表示从起始搜索点到当前点的代价(通常用某结点在搜索树中的深度来表示)。
另一部分,即h(n),它表示启发式搜索中最为重要的一部分,即当前结点到目标结点的估值,h(n)设计的好坏,直接影响着具有此种启发式函数的启发式算法的是否能称为A*算法。
一种具有f(n)=g(n)+h(n)策略的启发式算法能成为A*算法的充分条件是:1) 搜索树上存在着从起始点到终了点的最优路径。
2) 问题域是有限的。
3)所有结点的子结点的搜索代价值>0。
4)h(n)=<h*(n) (h*(n)为实际问题的代价值)。
当此四个条件都满足时,一个具有f(n)=g(n)+h(n)策略的启发式算法能成为A*算法,并一定能找到最优解。
对于一个搜索问题,显然,条件1,2,3都是很容易满足的,而条件4):h(n)<=h*(n)是需要精心设计的,由于h*(n)显然是无法知道的。
所以,一个满足条件4)的启发策略h(n)就来的难能可贵了。
不过h(n)距离h*(n)的程度不能过大,否则h(n)就没有过强的区分能力,算法效率并不会很高。
对一个好的h(n)的评价是:h(n)在h*(n)的下界之下,并且尽量接近h*(n).二、实验过程运行未修改的程序会得到最优路径为:算法共扩展节点数792.若修改源程序,即允许走斜线则distance=(int)sqrt((end_x-x)*(end_x-x)+(end_y-y)*(end_y-y)),即将估价函数改为欧式距离四连通改为八连通trytile(x,y-1,n,1); //尝试向上移动trytile(x+1,y-1,n,2);// 尝试向前上方移动trytile(x-1,y-1,n,2); // 尝试向后上方移动trytile(x-1,y+1,n,2); // 尝试向后下方移动trytile(x+1,y+1,n,2); // 尝试向前下方移动trytile(x,y+1,n,1); //尝试向下移动trytile(x-1,y,n,1); //尝试向左移动trytile(x+1,y,n,1); //尝试向右移动并修改g值if(lei==1) //如果是直线走{g_value=father->g+1;}if(lei==2) //如果是斜线走{g_value=father->g+1.414;}修改后的扩展结点数837三、实验分析A*算法最为核心的过程,就在每次选择下一个当前搜索点时,是从所有已探知的但未搜索过点中(可能是不同层,亦可不在同一条支路上),选取f 值最小的结点进行展开。
a星算法资料
A星算法A星算法是一种常用的路径规划算法,它可以在很多领域得到应用,如游戏开发、机器人导航等。
本文将介绍A星算法的原理、实现过程以及应用场景。
原理A星算法是一种启发式搜索算法,用于寻找从起点到目标点的最佳路径。
它基于Dijkstra算法和最小堆叠加了启发式因子来加速搜索过程。
A星算法在搜索过程中维护两个集合:开放集合和关闭集合。
开放集合存储待探索的节点,而关闭集合存储已经探索过的节点。
算法的核心思想是维护每个节点的估价函数f值,其中f值由节点到目标点的实际代价g值和节点到目标点的启发函数h值组成。
在每一步中,算法从开放集合中选择f值最小的节点进行拓展,并更新其邻居节点的f值。
实现过程1.初始化起点,并将其加入开放集合中,设置启发函数h值为起点到目标点的估计代价。
2.重复以下步骤直到目标节点被加入关闭集合:–从开放集合中选择f值最小的节点,将其加入关闭集合。
–针对选定节点的每个邻居节点,计算其新的f值并更新。
–如果邻居节点不在开放集合中,将其加入开放集合。
3.构建路径,反向回溯从目标节点到起点的最佳路径。
应用场景•游戏开发:A星算法可以用来实现游戏中的AI寻路,使NPC角色能够智能地避开障碍物。
•机器人导航:A星算法可以帮助机器人避开障碍物,规划出最优的路径来到目标点。
•交通规划:A星算法可以用来优化城市道路的规划,减少交通拥堵,提高车辆通行效率。
•资源调度:A星算法可以帮助企业在多个资源之间寻找最佳路径,提高资源利用率。
总之,A星算法在许多领域都有着广泛的应用,它的高效性和可扩展性使其成为一种非常有力的路径规划工具。
结语A星算法是一种非常经典的路径规划算法,其优秀的性能和广泛的应用使其成为计算机科学领域的重要研究内容。
希望本文介绍的内容对读者有所帮助,让大家更加深入了解A星算法的原理和应用。
a星算法预处理路径

a星算法预处理路径A*算法是一种启发式搜索算法,用于在图形空间中找到两个点之间的最短路路径。
除了起点和终点之外,它还需要一个评估函数来评估每个节点到目标节点的距离。
因为这个评估值是启发式的,所以A*算法能够在搜索空间中快速找到最优解。
与其他搜索算法不同的是,A*算法可以在不搜索整个搜索空间的情况下,找到最短路径。
A*算法的核心思想是使用一个评估函数f(n)来评估每个节点n的最小反向代价估计,这个评估函数的值是从起点到当前节点的代价g(n)和从当前节点到目标节点的最小估计代价h(n)之和,即f(n)=g(n)+h(n)。
其中h(n) 是它到目标节点的估计距离,g(n)是从起点到节点n的实际代价。
A*算法的预处理路径是将整个图形空间进行分类,将每个点都归入不同的类别中。
这样做的目的是为了让算法能够更快地搜索到目标节点。
预处理路径的过程一般包括两个步骤:建立地图和预处理路径。
建立地图时需要将地图分为不同的区域,确定每个区域的关系,并将每个区域编号。
这部分需要涵盖一定的算法和数据结构知识,如图形数据结构、二维数组、树、模拟人类思维过程的“分而治之”等。
在将地图分为不同的区域时需要考虑地图是否要求精细化处理,比如是否需要考虑建筑物的复杂形状、地形的起伏等因素。
同时,也要考虑到预处理路径的计算效率,是否需要对地图进行简化处理。
预处理路径是指在搜索之前,通过一些算法来计算出每个点到目标点的距离,这样可以加速搜索过程。
这个过程涉及到的算法有 Dijkstra 算法、BFS 算法、Floyd 算法等。
其中Dijkstra算法是一种确定路径的算法,可以用于单源最短路径问题。
BFS算法是一种广度优先搜索算法,在小型地图上表现很好,但在大型地图上会面临内存瓶颈。
Floyd算法是一种动态规划算法,可以用于求任意两点之间的最短路径,但计算量比较大。
综合考虑,一般使用 A* 算法来计算预处理路径。
在预处理路径时,需要考虑选择合适的启发式算法来评估每个节点的距离,同时需要考虑到搜索空间的大小和节点数量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A*算法及其应用(转载)2008-06-14 22:15一.引言图论是计算机科学中的一个重要研究工具,它产生于欧拉(Euler)对图的连通性的研究,但直到本世纪计算机诞生以后才得最迅猛的发展。
图论中的最短路径问题在计算机中有着广泛的应用,例如网络通信中最短路由的选择,人工智能中搜索算法的研究等。
本文对几种常见最短路径的算法进行介绍,尤其是在1968年发展起来的A*算法。
二.常用算法简介为叙述的方便,本文中假定所有图均以邻接矩阵表示,并将图论中的常用符号列于下:G---------------------无向图或有向图A=[aij]----------------图G的邻接矩阵表示V(G)------------------图G的顶点数ε(G)-----------------图G的边数。
1. Floyd算法这是几种最短路径算法中最简单的一种,本文不详细介绍,仅给出算法描述。
算法:For k:=1 to n doFor i:=1 to n doFor j:=1 to n doIf A[i,j]+A[k,j]<A[i,j] thenA[i,j]=a[i,k]+a[k,j];易知该算法的复杂度为o(n3)。
执行该算法后矩阵A中aij即为点i与点j间的最短路径,若要求路径的具体行程,需在算法中以数组保存路径的改变信息,这里不再介绍。
2. Dijkstra算法这种算法是Dijkstra于1959年提出的,主要用于计算图G中的某一点u0到其它点的最短距离。
算法:Step1:令l(u0)=0;l(v)=∞;v≠u0S0={u0};v=0;Step2:"vÎ┑Si=V(G)-Sil(v)=min{l(v),l(uI)+ω(ui,v)}设uI+1是使l(v)取到最小值的┑Si中的点。
令Si+1=Si∪{ui+1}Step3:If i=γ(G)-1 then Stop.If i<γ(G)-1 then i=i+1,Goto Step2.该算法的复杂度为o(n2)。
它与Floyd算法相比,优点在于计算量小,缺点是每次只能计算出图G中的一个点到其它点的最短路径,但由于网络通信中对路由的选择只需计算当前点与它点的距离,故此法得以广泛应用。
3. 广度优先搜索算法(Broad-First-Search)广度优先搜索算法是一种搜索策略,与之相对应的还有深度优先搜索算法。
广度优先是指从图G中的某点为始点出发,标记出所有与之相邻的点,并再以所有与之相邻的点为始点,搜索所有与这些点相邻的点,从而逐层向下扩展,实现对图的遍历。
同理,深度优先搜索是指从某点出发,逐层向下扩展,直到无路可扩展时向上回溯,它是优先考虑图的深度(指从某点的扩展深度),而广度优先则优先考虑图的广度(指从某点的可扩展量)。
由于该算法仅提供出一种搜索的策略,故它不仅可用于最短路径的搜索,事实上,图论中有很多问题均可通过此类搜索策略而得到实现。
本文提出它只是因为在A*算法中,其部分地用到了该算法的思想。
这里仅给出它的思想,不再对它在最短路径中的应用介绍。
算法:Step1: "vÎV(G),令l(v)=0,l=0Step2:If所有标号为l的顶点u的相关联的边皆已标号时,Then Goto Step3。
Else 把与u相关联的边的未标号的顶点标以l+1,并记录这些边。
令l=l+1,Goto(2)。
Step3:Stop。
4. 动态规划算法这种算法利用动态规划理论求解最短路径,即将始点到终点的路程分为若干状态,从而将之转化为多阶段决策问题,这样就可用动态规划理论来解决。
但这也必然决定了它的局限性,即只有求解可进行状态划分的问题,而事实上有很多问题是不能进行如是转化的,但这种算法却是在这种特殊条件下的最佳算法,因而也得到一些应用,这里不再详述。
三.A*算法1. 简介A*算法是到目前为止最快的一种计算最短路径的算法,但它一种‘较优’算法,即它一般只能找到较优解,而非最优解,但由于其高效性,使其在实时系统、人工智能等方面应用极其广泛。
A*算法结合了启发式方法(这种方法通过充分利用图给出的信息来动态地作出决定而使搜索次数大大降低)和形式化方法(这种方法不利用图给出的信息,而仅通过数学的形式分析,如Dijkstra算法)。
它通过一个估价函数(Heuristic Function)f(h)来估计图中的当前点p到终点的距离(带权值),并由此决定它的搜索方向,当这条路径失败时,它会尝试其它路径。
因而我们可以发现,A*算法成功与否的关键在于估价函数的正确选择,从理论上说,一个完全正确的估价函数是可以非常迅速地得到问题的正确解答,但一般完全正确的估价函数是得不到的,因而A*算法不能保证它每次都得到正确解答。
一个不理想的估价函数可能会使它工作得很慢,甚至会给出错误的解答。
为了提高解答的正确性,我们可以适当地降低估价函数的值,从而使之进行更多的搜索,但这是以降低它的速度为代价的,因而我们可以根据实际对解答的速度和正确性的要求而设计出不同的方案,使之更具弹性。
2. 实现限于A*算法实现上的复杂,这里不能给出具体的算法流程,下面分几个部分对A*算法实现中的几个关键性问题加以阐述。
3. 数据结构众所周知,对图的表示可以采用数组或链表,而且这些表示法也各也优缺点,数组可以方便地实现对其中某个元素的存取,但插入和删除操作却很困难,而链表则利于插入和删除,但对某个特定元素的定位却需借助于搜索。
而A*算法则需要快速插入和删除所求得的最优值以及可以对当前结点以下结点的操作,因而数组或链表都显得太通用了,用来实现A*算法会使速度有所降低。
要实现这些,可以通过二分树、跳转表等数据结构来实现,我采用的是简单而高效的带优先权的堆栈,经实验表明,一个1000个结点的图,插入而且移动一个排序的链表平均需500次比较和2次移动;未排序的链表平均需1000次比较和2次移动;而堆仅需10次比较和10次移动。
需要指出的是,当结点数n大于10,000时,堆将不再是正确的选择,但这足已满足我们一般的要求。
还有一种更好的方法是Hot Queues,而且这种方法还可应用于Dijkstra算法以降低其复杂度。
当我们移动估价函数值为f的结点时,我们插入值为f+δ(δ<=C)(若δ>=0将意味着估价函数是有效的,反之亦然),常量C为从一个结点到相邻结点的权的最大改变。
同时我们用一些“容器”来保存估价函数值的子集(这正如o(n)的排序算法的思想),例如,当有10个“容器”时,堆将平均只包含1/10的估价值。
因而这将比用堆更为有效。
4. 估价函数(Heuristic Function)估价函数的正确选取将直接关系到A*算法的成功与否,而函数的确定却与实际情形有着密切的关系。
在本文中,仅对网格状地图的估价函数作部分讨论,而在其它情形中,需要作不同的分析,但至少估价函数应为连续函数。
a. Manhattan Distance这是一种标准的估价函数,h(A) = 10 * (abs(A.x-goal.x) + abs(A.y-goal.y))b. Diagonal Distance如果在地图上允许作斜线方向的运动,则Mahattan Distance修正为Diagonal Distanceh(A) = max(abs(A.x-goal.x), abs(A.y-goal.y))5. 估价函数的判优一般情形下,我们只需对估价函数的值进行比较而取其大者即可,但在几个结点的估价函数值相同的情形下,我们需要采取一定的策略来决定这几者谁更优,从而避免对多个点的搜索。
从而如下代码可实现之:double dx1 = currentX - goalX;double dy1 = currentY - goalY;double dx2 = startX - goalX;double dy2 = startY - goalY;cross = dx1*dy2 - dx2*dy1;if( cross<0 ) cross = -cross;... add cross*0.001 to the heuristic ...这段代码计算始点、当前点和终点的矢量积,从而可以判断这三点是否共线(或近似共线),这样不同点间即使有微小的差别也会被放大,从而更利于判断。
6. 改进的A*算法a. Beam Search在A*算法中需要保留所有的结点,这将使得时间和空间的消耗都很大,而Beam Search方法对结点数作出限期,当结点数过多时,它会将一些不(大)可能为最优的点排除,从而降低时间和空间的要求,但需要说明的是,由于在排除结点后需对结点排序,当排序的工作量大于排除点后所节省的工作量,则该方法无意义。
b. Iterative deepening这是一种在人工智能中常使用的方法,它首先产生一近似值,然后对它进行修正而逐步接近最优解。
这其实在一种博奕算法的变形。
c. Dynamic weighting这种算法是基于这样的考虑,即在搜索初期以速度优先,在搜索后期以准确度优先(这可通过对搜索初、后期赋予不同的权值来实现)。
即:f(p) = g(p) + w(p) * h(p)d. Bidirectional search这种算法从起点和终点同时应用A*算法,直到有结点相遇。
其缺点在于复杂度太大,一般仅用于复杂的图形。
e. Hierarchical A*这种算法思想是将搜索过程化,对每个简单过程求解从而得全局较优解。
正如当我们到另一城市时,可分解为从家里“搜索”一条路径至车站,再从车站“搜索”一条路径到另一城市,当我们从家里出发时,需要考虑的是怎样尽快地到达车站,而不是怎样尽快地到另一城市。
f. Dynamic A*(D*)这种算法主要用于人工智能和机器人技术。
由于A*算法一开始要求获得全部信息,而这在实际中有时是不可能的,而D*算法就是在假定信息不完整的前提下应用A*算法,但它会随着得到信息的增多而不断改进结果,这就决定了它对空间的要求相当高,因为它需要保留以前的所有获得信息及运算情形。
四.结论A*算法作为解决最优路径的一种高效算法,自从1968年诞生以来,得到了广泛的应用,而其的多种改进算法也在许多领域发挥着作用。
可以预见,在更优的算法发现以前,A*算法将会得到更广泛的应用,并会由于图论、人工智能、机器人技术、自动控制等多学科的融合而得到更大的发展。
参考文献:[ 1 ] 卢开澄、卢华明,图论及其应用(第二版),北京,清华大学出版社,1982[ 2 ] Computer Networks(Third Edition),Andrew S. Tanenbaum,Prentice Hall International, Inc.,1998[ 3 ] Russell & Norvig,AI: A Modern Approach[ 4 ] Ginsberg,Essentials of Artificial Intelligence。