距离矢量算法解析
距离矢量路由的工作原理

距离矢量路由的工作原理
距离矢量路由(Distance Vector Routing)是一种基于距离信息的路由算法。
其工作原理如下:
1. 初始状态:每个路由器都会初始化自己的路由表,表中包含与邻居路由器的距离信息。
初始时,每个路由器只知道相邻路由器的距离。
2. 距离计算:路由器通过交换路由表与邻居路由器进行距离信息的交换。
通过接收邻居路由器的路由表,路由器可以计算到达目标路由器的最小距离,并更新自己的路由表。
3. 距离更新:当路由器计算出新的到达目标路由器的最小距离时,它会更新自己的路由表。
此时,路由器需要将更新后的路由表发送给邻居路由器。
4. 路由表更新:在收到邻居路由器发送的更新后的路由表时,路由器会比较新旧路由表之间的差异,并更新自己的路由表。
如果新的路由表中的距离信息更优,则将新路由表的信息更新到自己的路由表中。
5. 路由信息传播:通过以上步骤的循环迭代,路由器会逐渐更新自己的路由表,直到收敛到最优解。
最终,每个路由器都会知道到达所有目标路由器的最短路径,并能够转发数据包到最佳路径。
需要注意的是,距离矢量路由算法存在一些问题,比如计数问题(counting-to-infinity)和毒性逆转问题(poison reverse)。
为了解决这些问题,距离矢量路由算法通常会采用一些增强手段,如拆分-水平拆分路由协议(Split Horizon with Poison Reverse)和拆分-视窗拆分路由协议(Split Horizon with Route T ag)。
计算机网络中的路由算法
计算机网络中的路由算法路由算法在计算机网络中起着关键的作用,它用于确定数据包在网络中的传输路径。
根据不同的网络拓扑和需求,有多种不同的路由算法被应用。
本文将介绍几种常见的路由算法。
1. 距离矢量算法(Distance Vector Algorithm)距离矢量算法是一种分布式的路由算法,每个节点在路由表中记录到达目的节点的距离向量。
节点之间通过交换距离向量信息来更新路由表,并且通过Bellman-Ford算法来计算最短路径。
该算法简单易实现,但是在大型网络中容易产生计数到无穷大的问题,即由于链路故障等原因产生的无限循环。
2. 链路状态算法(Link State Algorithm)链路状态算法是一种集中式的路由算法,每个节点都会收集与自身相连的链路状态信息,并通过最短路径算法(如Dijkstra算法)计算出到达其他节点的最短路径。
然后,每个节点都将自己的链路状态信息广播给所有其他节点,使得每个节点都有完整的网络拓扑和链路状态信息。
该算法需要节点之间频繁的广播和计算,但是能够保证收敛,即要么找到最短路径,要么不进行路由。
3. 路径向量算法(Path Vector Algorithm)路径向量算法可以看作是距离矢量算法和链路状态算法的结合,它通过回退进行路径检测和避免计数到无穷大的问题。
每个节点在路由表中记录到达目的节点的路径和向量信息,通过交换路径向量信息来更新路由表。
在计算最短路径时,路径向量算法使用类似链路状态算法的Dijkstra算法,但是在寻找路径时,会检查前面的节点是否已经在路径中出现,以避免产生环路。
4. 队列距离矢量算法(Queue Distance Vector Algorithm)队列距离矢量算法是距离矢量算法的一种改进算法,主要解决计数到无穷大问题。
该算法引入了队列和计数器,通过计数器和链路状态信息来确定数据包是否进入队列。
每个节点在路由表中记录到达目的节点的距离向量和队列的长度。
计算机网络原理 距离矢量路由
计算机网络原理距离矢量路由距离矢量路由选择(Distance Vector Routing)算法是通过每个路由器维护一张表(即一个矢量)来实现的,该表中列出了到达每一个目标地的可知的最短路径及所经过的线路,这些信息通过相邻路由器间交换信息来更新完成。
我们称这张表为路由表,表中按进入子网的节点索引,每个表项包含两个部分,到达目的地最优路径所使用的出线及一个估计的距离或时间,所使用的度量可能是站段数,时间延迟,沿着路径的排队报数或其他。
距离矢量路由选择算法有时候也称为分布式Bellman-Ford路由选择算法和Ford-Fulkerson算法,它们都是根据其开发者的名字来命名的(Bellman,1957;Ford and Fulkerson,1962)。
它最初用于ARPANET路由选择算法,还用于Internet和早期版本的DECnet 和Novell的IPX中,其名字为RIP。
AppleTalk t Cisco路由器使用了改进型的距离矢量协议。
在距离矢量路由选择算法中,每个路由器维护了一张子网中每一个以其他路由器为索引的路由选择表,并且每个路由器对应一个表项。
该表项包含两部分:为了到达该目标路由器而首选使用的输出线路,以及到达该目标路由器的时间估计值或者距离估计值。
所使用的度量可能是站点数,或者是以毫秒计算的延迟,或者是沿着该路径排队的分组数目,或者其他类似的值。
假设路由器知道它到每个相邻路由器的“距离”。
如果所用的度量为站点,那么该距离就为一个站点。
如果所用的度量为队列长度,那么路由器只需检查每一个队列即可。
如果度量值为延迟,则路由器可以直接发送一个特殊的“响应”(ECHO)分组来测出延时,接收者只对它加上时间标记后就尽快送回。
距离矢量路由算法
距离矢量路由算法(Distance Vector Routing,DV)是ARPANET网络上最早使用的路由算法,也称Bellman-Ford路由算法和Ford-Fulkerson算法,主要在RIP(Route Information Protocol)协议中使用。
Cisco的IGRP和EIGRP路由协议也是采用DV这种路由算法的。
“距离矢量路由算法”的基本思想如下:每个路由器维护一个距离矢量(通常是以延时是作变量的)表,然后通过相邻路由器之间的距离矢量通告进行距离矢量表的更新。
每个距离矢量表项包括两部分:到达目的结点的最佳输出线路,和到达目的结点所需时间或距离,通信子网中的其它每个路由器在表中占据一个表项,并作为该表项的索引。
每隔一段时间,路由器会向所有邻居结点发送它到每个目的结点的距离表,同时它也接收每个邻居结点发来的距离表。
这样以此类推,经过一段时间后便可将网络中各路由器所获得的距离矢量信息在各路由器上统一起来,这样各路由器只需要查看这个距离矢量表就可以为不同来源分组找到一条最佳的路由。
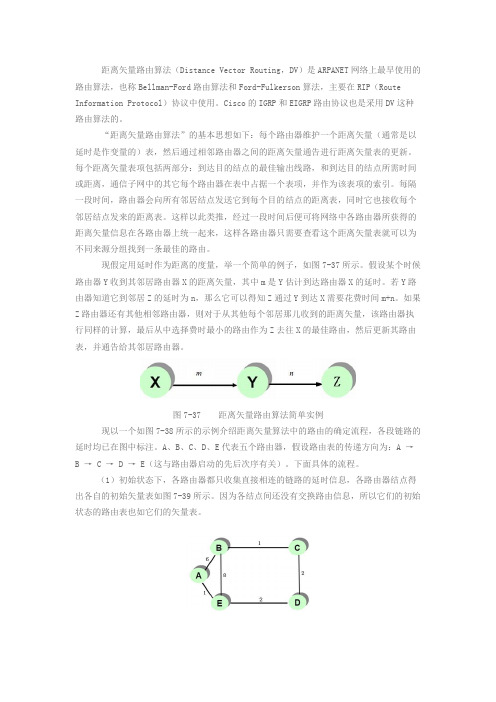
现假定用延时作为距离的度量,举一个简单的例子,如图7-37所示。
假设某个时候路由器Y收到其邻居路由器X的距离矢量,其中m是Y估计到达路由器X的延时。
若Y路由器知道它到邻居Z的延时为n,那么它可以得知Z通过Y到达X需要花费时间m+n。
如果Z路由器还有其他相邻路由器,则对于从其他每个邻居那儿收到的距离矢量,该路由器执行同样的计算,最后从中选择费时最小的路由作为Z去往X的最佳路由,然后更新其路由表,并通告给其邻居路由器。
图7-37 距离矢量路由算法简单实例现以一个如图7-38所示的示例介绍距离矢量算法中的路由的确定流程,各段链路的延时均已在图中标注。
A、B、C、D、E代表五个路由器,假设路由表的传递方向为:A → B →C → D → E(这与路由器启动的先后次序有关)。
下面具体的流程。
(1)初始状态下,各路由器都只收集直接相连的链路的延时信息,各路由器结点得出各自的初始矢量表如图7-39所示。
距离矢量路由算法
距离矢量路由算法距离矢量路由算法是一种常用的路由协议算法,用于在一张网络拓扑图中计算一个节点到其它节点的最短路径,从而实现数据包的转发和路由选择。
本文将详细介绍距离矢量路由算法的原理、实现和优化方法。
一、距离矢量路由算法原理距离矢量路由算法是一种分布式算法,它的核心思想是每个节点通过交换路由信息来建立一个网络的路由表,并根据这张表来进行数据包的转发。
在距离矢量路由算法中,每个节点都会维护一个距离向量,它表示从当前节点到其它节点的距离。
距离向量包含三部分信息:到达某个节点的距离、中转节点和前缀信息。
其中,到达某个节点的距离可以采用最小跳数、带权重的跳数或延迟时间等方式来衡量。
在距离矢量路由算法中,每个节点都会周期性地向邻居节点广播自己的距离向量,并接收邻居节点的距离向量。
通过比较邻居节点的距离向量和自己的距离向量来更新自己的路由表。
如果邻居节点的距离更小,则更新路由表;如果邻居节点的距离更大,则不做任何操作。
这样,所有的节点都会逐步收敛到一个稳定状态,每个节点的路由表也会被更新成最优路由。
二、距离矢量路由算法实现距离矢量路由算法的实现通常可以分为两个阶段:初始化和更新。
在初始化阶段,每个节点都会初始化自己的距离向量和路由表,并向邻居节点发送距离向量。
在更新阶段,每个节点会周期性地接收邻居节点的距离向量,比较并更新自己的路由表,然后向邻居节点发送自己的距离向量。
具体实现的过程如下:1. 初始化阶段:(1)每个节点都向其它节点广播自己的距离向量,并保存邻居节点的距离向量。
(2)每个节点都根据邻居节点的距离向量更新自己的路由表,并确定最短路径。
2. 更新阶段:(1)每个节点周期性地向邻居节点发送自己的距离向量。
(2)每个节点周期性地接收邻居节点的距离向量,并比较以更新自己的路由表。
(3)如果某个节点的距离向量发生了变化,则它会向其它节点广播自己的距离向量。
三、距离矢量路由算法优化距离矢量路由算法是一种简单有效的路由协议算法,但也存在一些问题。
距离矢量路由算法

距离矢量路由算法
距离矢量路由算法是一种计算网络中最佳路径的算法。
这种算法通过在网络上的每个节点中保存到其他节点的距离向量来工作。
每个节点根据它们之间的距离向量,计算到每个其他节点的最短路径。
这个过程不断重复,直到每个节点都拥有网络中所有其他节点的最短路径信息。
距离矢量路由算法可以用于计算全网最短路径,也可以用于计算子网内的最短路径。
它是一种分布式算法,因为每个节点都只能看到它的邻居节点的距离向量,而不知道网络的整体拓扑结构。
这种算法虽然简单,但它的计算复杂度较高,因为每个节点都需要计算到其他节点的最短路径。
在距离矢量路由算法中,节点会周期性地向邻居发送它们的距离向量,以便邻居节点可以更新它们的路由表。
如果一个节点发现它的距离向量发生了变化,它会向它的邻居发送一个更新消息。
这个过程也会不断重复,直到每个节点的路由表都被更新到最优状态。
距离矢量路由算法在实际应用中有一些限制。
由于每个节点都只能看到它的邻居节点的距离向量,因此它可能会选择一个不是全局最短路径的路径。
此外,如果一个节点的路由表发生了错误,它可能会向其他节点发送错误的路由信息,导致整个网络的不稳定性。
为了解决这些问题,其他类型的路由算法,如链路状态路由算法和路径矢量路由算法,也被广泛使用。
距离矢量选路算法
距离矢量选路算法
距离矢量选路算法(Distance Vector Routing Protocol)是一种常用的路由协议,用于在计算机网络中确定数据包传递的最佳路径。
它是基于距离矢量的路由选择原理而设计的。
在距离矢量选路算法中,每个路由器维护一个路由表,该表记录了到达所有目的地的最佳路径及其距离。
路由器通过交换路由表信息来更新并计算最佳路径。
每个路由器周期性地向其邻居发送其路由表,并接收和处理邻居发送的路由表信息。
通过比较邻居的路由表信息和自身的路由表信息,路由器可以更新并调整其路由表,以选择最佳路径。
距离矢量选路算法的核心是计算最短路径。
每个路由器通过将距离信息传递给其邻居来计算到达目的地的最佳路径。
路由器在更新路由表时,根据收到的邻居路由表信息计算出各个目的地的最佳路径,并将其记录在自己的路由表中。
距离矢量选路算法使用距离作为路径选择的标准,通常使用跳数、带宽等指标来表示距离。
距离矢量选路算法的优点是简单、易于实现和管理。
它适用于小型网络或者网络规模较小的情况。
然而,距离矢量选路算法也存在一些缺点,如计算复杂度较高、收敛速度慢、容易产生环路等问题。
因此,在大型网络或需要高性能和可靠性的网络中,通常会选择其他更高级的路由协议。
距离矢量算法
距离矢量算法
距离矢量算法是一种常用的机器学习算法,它可以处理聚类、分
类和回归等问题。
距离矢量算法可以为我们提供一种可行的解决方案,帮助我们准确地表达客观实体之间的相关性。
距离矢量算法是一种以客观属性的距离度量为基础的机器学习技术。
它可以通过计算客观属性之间距离,进而分析两个实体的关系。
距离矢量算法的核心思路是,首先精确的定义领域的客观属性,然后
给每个属性根据其重要程度不同定义不同的距离度量,最后将所有客
观属性的距离度量值进行综合,最终获得两个实体之间的相关程度。
距离矢量算法可以用于很多方面,比如数据挖掘中的聚类、分类
和回归等,以及推荐系统中的个性化推荐。
距离矢量算法对于虚拟空
间的划分也具有重要意义,可以把虚拟空间划分成若干聚类,进而可
以加速搜索,使搜索结果更准确。
总之,距离矢量算法是一种重要的机器学习技术,可以用来准确
表达客观实体之间的相关性,广泛用于数据挖掘、推荐系统以及虚拟
空间的划分等方面,具有较强的实用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10.4.0.0
S0
X
S0
X
C
E0
X
RIP从某个接口学到的路由不再从该接口发布给其他路由器
毒性反转
10.1.0.0
E0
10.2.0.0
10.3.0.0
A
S0
S0
B
S1
S0
C
E0
X
Subnet 10.4.0.0 metric 16
10.1.0.0 10.2.0.0 10.3.0.0 10.4.0.0 E0 S0 S0 S0 2
触发更新
subnet 10.4.0.0, metric 16
subnet 10.4.0.0, metric 16
subnet 10.4.0.0, metric 16
10.1.0.0
E0
10.2.0.0 A
S0 S0
10.3.0.0 B
S1 S0
10.4.0.0 C
E0
X
得知网络拓扑结构发生改变,不等待发送周 期 ,立刻通告更新后全部的路由表
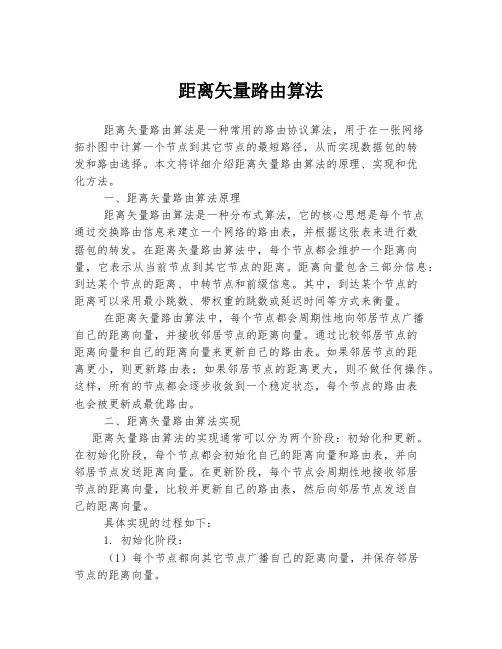
存储在每个结点中的初始距离
距离矢量详解—发送包含自己距离表的消息给其他邻接点 1、结点F告诉A它可以到结点G,开销为1,A也知道它能以 开销1到达F,因此二者相加就可以知道经F到G的开销;A 到G的总开销2小于当前的开销无穷大,因此A记录它可经F 到达G,开销为2; 2、类似的,A从C得知,C能以开销1到达D;A将此与到C的 开销1相加,决定可通过C以开销2到达D,优于旧的开销无 穷大 3、同时,A从C得知,C能以开销1到达B,因此它推断经C 到B的开销为2,这比当前A到B的开销1大,因此新的信息 被忽略。
Routing Table Hop 1 0 Next Hop Net 10.0.0.0 20.0.0.0
Routing Table Hop 2 1 Next Hop 30.0.0.1 30.0.0.1
20.0.0.1 被标记为无 10.0.0.0 效 20.0.0.0
30.0.0.0
40.0.0.0
RIP工作原理 ---- 距离矢量算法
路由算法 D( i, j)= 0 D( i, j) =MIN{ d(i, k)+ D(k, j) } k为所有与i相邻的路由器 图示距离矢量算法
d(i,k)
D(k,j) k1
d(i, k)+ D(k, j) =
i k2
j
距离矢量详解
B A C
D E
F
G
1、对距离向量路由所做的初始假设是每个结点都知道其邻接点得链路开 销。 到不相邻结点的链路开销被指定为无穷大; 2、每条路径的开销为1,所以开销最小的路径就是包含跳数最少的路径。
30.0.0.0
30.0.0.2 40.0.0.0
30.0.0.0
40.0.0.0
1
2
20.0.0.2
20.0.0.2
30.0.0.0
40.0.0.0
0
1
0
2
路由环路-4
产生路由环路,直 到跳数增加到16为 止
.1 10.0.0.0 R1
.2 R2
.1
.2 R3 40.0.0.0
20.0.0.0
30.0.0.0
发送40.0.0.0的路 Net Hop Next Hop 由更新,跳数为2 Hop
10.0.0.0 20.0.0.0 1 0
Routing Table Next Hop Net
Routing Table Hop 2 1 Next Hop 30.0.0.1 30.0.0.1 30.0.0.1
将跳数改变为2跳, 20.0.0.1 10.0.0.0 下一条地址为 20.0.0.0 30.0.0.1
Hold-down倒记时
hold-down倒记时以后更新路由表
10.1.0.0
E0
10.2.0.0 A
S0 S0
10.3.0.0 B
S1 S0
10.4.0.0 C
E0
X
等待网络中其它路由器收敛,在该时间内不学 习任何与该网络相关的路由信息(RIP缺省180 秒),在倒记时其间继续向其它路由器发送毒 化信息
动态路由协议
根据路由所执行的算法分类
– 距离矢量路由协议
北 京 200公里
– 链路状态路由协议
距离矢量路由协议
路由器每经过特定时间周期向邻居发送自己的路由表
距离:有多远 矢量:从哪个方向
R1
R2
R
我通过R2可以到达路由 器R,R2到R之间的具 我能够到达路由器R, 体细节我不清楚 距离是5
1
2
20.0.0.2
20.0.0.2
30.0.0.0
40.0.0.0
0
1 30.0.0.2
30.0.0.0
40.0.0.0
0
16
路由环路-3
.1 10.0.0.0 R1
.2 R2
.1
.2 R3 40.0.0.0
20.0.0.0
30.0.0.0
Routing Table Net 10.0.0.0 20.0.0.0 0 0
D E
F G
2 1
1 2
2 2
2 3
1 2
2 2
0 3
2 1
3 0
2 3
2 2
0 1
1 3
1 0
存储在每பைடு நூலகம்结点的最终距离
路由环路-1
.1 10.0.0.0 R1
.2 R2
.1
.2 R3 40.0.0.0
20.0.0.0
30.0.0.0
Routing Table Net 10.0.0.0 20.0.0.0 30.0.0.0 40.0.0.0 Hop 0 0 1 2 20.0.0.2 20.0.0.2 Next Hop Net
30.0.0.0
40.0.0.0
0
0
路由环路-2
发送40.0.0.0的跳数 为1的更新信息
.1 10.0.0.0 R1
.2 R2
.1
.2 R3 40.0.0.0
20.0.0.0
30.0.0.0
Routing Table Net 10.0.0.0 20.0.0.0 Hop 0 0 Next Hop Net
Routing Table Net 10.0.0.0 20.0.0.0 Hop 0 0 Next Hop Net
Routing Table Hop 1 0 Next Hop 20.0.0.1 Net 10.0.0.0 20.0.0.0 将跳数改变为3跳
Routing Table Hop 2 1 Next Hop 30.0.0.1 30.0.0.1 30.0.0.2 10.0.0.0 20.0.0.0
30.0.0.0
40.0.0.0
1
2
20.0.0.2
20.0.0.2
30.0.0.0
40.0.0.0
0
3 30.0.0.2
30.0.0.0
40.0.0.0
0
2
解决路由环路的方法
水平分割
毒性反转
触发更新 Hold-down倒计时
水平分割
10.1.0.0
E0
10.2.0.0 A
S0
10.3.0.0 B
距离矢量详解
距离矢量算法思想: 矢量距离算法(简称V-D算法)的思想是:网关周期性地 向外广播路径刷新报文,主要内容是由若干(V,D)序偶 组成的序偶表;(V,D)序偶中的V代表“向量”,标识网 关可到达的信宿(网关或主机),D代表距离,指出该网关 去往信宿V的距离;距离D按驿站的个数计。其他网关收到 某网关的(V,D)报文后,据此按照最短路径原则对各自 R1 R2 的路由表进行刷新
距离矢量算法解析
主要内容
1、什么是动态路由 2、动态路由根据算法的分类 3、距离矢量算法详解 4、路由环路 5、水平分割
动态路由协议
动态路由协议特点
– 向其他路由器传递路由信息 – 接收其他路由器的路由信息
– 根据收到的路由信息计算出到每个目的网络的 最优路径,并由此生成路由表 – 根据网络拓朴变化及时调整路由表,同时向其 他路由器宣告拓朴改变的信息
0
0
10.2.0.0
S0 S1 S1 E1 2
0
0
Possibly Down
10.3.0.0
S0 S0 S0 S0
0
16
10.3.0.0
10.4.0.0 10.1.0.0
10.4.0.0
10.2.0.0 10.1.0.0
1
2
当一条路径信息变为无效之后, 路由器并不立即将它从路由表中 删除,而是用16,即不可达的度 量值将它广播出去。缺点增加了 路由表的大小。
距离矢量详解—包含到其他所有结点开销
存储在结点 的 信 息 A A B C D E F G 0 1 1 ∞ 1 1 ∞ B 1 0 1 ∞ ∞ ∞ ∞ C 1 1 0 1 ∞ ∞ ∞ 到每个结点的距离 D ∞ ∞ 1 0 ∞ ∞ 1 E 1 ∞ ∞ ∞ 0 ∞ ∞ F 1 ∞ ∞ ∞ ∞ 0 1 G ∞ ∞ ∞ 1 ∞ 1 0
Routing Table Hop 1 0 Next Hop 20.0.0.1 Net 10.0.0.0 20.0.0.0
Routing Table Hop 2 1 Next Hop 30.0.0.1 30.0.0.1 10.0.0.0 20.0.0.0
30.0.0.0
40.0.0.0
0
1 30.0.0.2
距离矢量详解—发送包含自己距离表的消息给其他邻接点
结点A的初始路由表 目标 B C 开销 1 1 下一跳 B C