关于MATLAB边缘检测sobel算子
实现用三种边缘检测算子对一幅图像提取边缘
实现用三种边缘检测算子对一幅图像提取边缘,给出结果并分析。
用sobel,log,candy三种算子对图像进行边缘提取:f = imread('E:\木子的U盘\大三的木子\第一学期\数字图像处理\xback.jpg');f = rgb2gray(f); %将图像转化为灰度图像[gsobel_default,ts] = edge(f,'sobel');%利用sobel算子的默认语法得到边缘图像subplot(231);imshow(gsobel_default);title('g sobel default');[glog_default,tlog]=edge(f,'log');%利用log算子的默认语法得到边缘图像subplot(233);imshow(glog_default);title('g log default');[gcanny_default,tc]=edge(f,'canny');%利用candy算子的默认语法得到边缘图像subplot(235);imshow(gcanny_default);title('g canny default');gSobel_best=edge(f,'sobel',0.05);%减少不必要的细节subplot(232);imshow(gSobel_best);title('g sobel best');gLog_best=edge(f,'log',0.003,2.25);%subplot(234);imshow(gLog_best);title('g log best');gCanny_best=edge(f,'canny',[0.04 0.10],1.5);%subplot(236);imshow(gCanny_best);title('g canny best');MATLAB图像显示如下:分析如下:sobel得出的结果与试图检测边缘的目标相差太远。
基于Sobel算子图像边缘检测的MATLAB实现
基于Sobel算子图像边缘检测的MATLAB 实现作者:吴术路来源:《电脑知识与技术》2010年第19期摘要:边缘检测在数字图像处理中有着重要的应用。
边缘是图像的最基本特征。
该文利用Sobel算子对图像进行水平和垂直的边缘提取,并对图像进行MATLAB仿真比较,仿真实验表明,该方法对图像边缘的检测精度较高,抗噪声能力强,提高了图像边缘检测效果。
关键词:边缘检测;Sobel算子;MATLAB中图分类号:TP391文献标识码:A文章编号:1009-3044(2010)19-5314-02Based on Sobel Edge Detection Operator of MATLAB ImplementationWU Shu-lu(Qinghai & TV University, Xi'ning 810008, China)Abstract: Edge detection in the digital image processing has important applications. Edge is the most basic features of the image. In this paper, Sobel operator to the image horizontal and vertical edge detection, and image comparison MATLAB simulation, simulation experiments show that the method has high precision in image detection, anti-noise ability and improving the image edge detection.Key words: edge detection; sobel operator; MATLAB边缘检测技术对于数字图像非常重要,边缘是所要提取目标和背景的边界线,提取出边缘才能将目标和背景区分开。
边缘提取和边缘检测matlab程序代码大全
附录Part1:对cameraman原始图像处理的仿真程序:clcclear allclose allA = imread('cameraman.bmp'); % 读入图像subplot(2,4,1);imshow(A);title('原图');x_mask = [1 0;0 -1]; % 建立X方向的模板y_mask = rot90(x_mask); % 建立Y方向的模板I = im2double(A); % 将图像数据转化为双精度dx = imfilter(I, x_mask); % 计算X方向的梯度分量dy = imfilter(I, y_mask); % 计算Y方向的梯度分量grad = sqrt(dx.*dx + dy.*dy); % 计算梯度grad = mat2gray(grad); % 将梯度矩阵转换为灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 用阈值分割梯度图像subplot(2,4,2);imshow(BW); % 显示分割后的图像即边缘图像title('Roberts');y_mask = [-1 -2 -1;0 0 0;1 2 1];x_mask = y_mask';I = im2double(A);dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy); % 计算梯度grad = mat2gray(grad);level = graythresh(grad);BW = im2bw(grad,level);subplot(2,4,3);imshow(BW); % 显示分割后的图像即边缘图像title('Sobel');y_mask = [-1 -1 -1;0 0 0;1 1 1];x_mask = y_mask';dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy); % 计算梯度grad = mat2gray(grad);level = graythresh(grad);BW = im2bw(grad,level); % 用阈值分割梯度图像subplot(2,4,4);imshow(BW); % 显示分割后的图像即边缘图像title('Prewitt');mask=[0,-1,0;-1,4,-1;0,-1,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58); % 用阈值分割梯度图像subplot(2,4,5);imshow(BW); % 显示分割后的图像,即梯度图像title('Laplacian');mask=[0,0,-1,0,0;0,-1,-2,-1,0;-1,-2,16,-2,-1;0,-1,-2,-1,0;0,0,-1,0,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58);subplot(2,4,6);imshow(BW); % 显示分割后的图像,即梯度图像title('log');BW1 = edge(I,'canny'); % 调用canny函数subplot(2,4,7);imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny');mask1=[-1 -2 -1;0 0 0;1 2 1]; % 建立方向模板mask2=[-2 -1 0;-1 0 1;0 1 2];mask3=[-1 0 1;-2 0 2;-1 0 1];mask4=[0 1 2;-1 0 1;-2 -1 0];mask5=[1 2 1;0 0 0;-1 -2 -1];mask6=[2 1 0;1 0 -1;0 -1 -2];mask7=[1 0 -1;2 0 -2;1 0 -1];mask8=[0 -1 -2;1 0 -1;2 1 0];d1 = imfilter(I, mask1); % 计算8个领域的灰度变化d2 = imfilter(I, mask2);d3 = imfilter(I, mask3);d4 = imfilter(I, mask4);d5 = imfilter(I, mask5);d6 = imfilter(I, mask6);d7 = imfilter(I, mask7);d8 = imfilter(I, mask8);dd = max(abs(d1),abs(d2)); % 取差值变化最大的元素组成灰度变化矩阵dd = max(dd,abs(d3));dd = max(dd,abs(d4));dd = max(dd,abs(d5));dd = max(dd,abs(d6));dd = max(dd,abs(d7));dd = max(dd,abs(d8));grad = mat2gray(dd); % 将灰度变化矩阵转化为灰度图像BB = grad;FW=median(BB(:))/0.6745;B = BB.*BB;B = sum(B(:));FX= sqrt(B/256^2);FS=sqrt(max(FX^2-FW^2,0));T=sqrt(2)*FW^2/FS; % 计算最佳阈值grad = mat2gray(BB);BW2=im2bw(grad,T); % 用最佳阈值分割梯度图像subplot(2,4,8);imshow(BW2); % 显示分割后的图像,即边缘图像title('sobel改进算子');Part2加入高斯噪声后的cameraman仿真程序:clcclear allclose allA = imread('cameraman.bmp'); % 读入图像V=0.009;X=imnoise(A,'gaussian',0,V);subplot(2,4,1);imshow(X);%添加均值为0、方差0.09的高斯噪声x_mask = [1 0;0 -1]; % 创建X方向的模板y_mask = rot90(x_mask); % 创建Y方向的模板I = im2double(X); % 图像数据双精度转化dx = imfilter(I, x_mask); % X方向的梯度分量的计算dy = imfilter(I, y_mask); % Y方向的梯度分量的计算grad = sqrt(dx.*dx + dy.*dy); % 梯度计算grad = mat2gray(grad); % 梯度矩阵转换成灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 使用阈值分割梯度图像subplot(2,4,2);imshow(BW); % 显示分割后的图像即边缘图像title('Roberts');y_mask = [-1 -2 -1;0 0 0;1 2 1];x_mask = y_mask';dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy);grad = mat2gray(grad); % 梯度矩阵转为灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 用阈值分割梯度图像subplot(2,4,3);imshow(BW); % 显示分割后的图像即边缘图像title('Sobel');y_mask = [-1 -1 -1;0 0 0;1 1 1];x_mask = y_mask';dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy);grad = mat2gray(grad);level = graythresh(grad);BW = im2bw(grad,level);subplot(2,4,4);imshow(BW); % 显示分割后的图像即边缘图像title('Prewitt');mask=[0,-1,0;-1,4,-1;0,-1,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58); % 用阈值分割梯度图像subplot(2,4,5);imshow(BW); % 显示分割后的图像,即梯度图像title('Laplacian');mask=[0,0,-1,0,0;0,-1,-2,-1,0;-1,-2,16,-2,-1;0,-1,-2,-1,0;0,0,-1,0,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58); % 用阈值分割梯度图像subplot(2,4,6);imshow(BW); % 显示分割后的图像,即梯度图像title('log');BW1 = edge(I,'canny'); % 调用canny函数subplot(2,4,7);imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny');mask1=[-1 -2 -1;0 0 0;1 2 1]; % 建立方向模板mask2=[-2 -1 0;-1 0 1;0 1 2];mask3=[-1 0 1;-2 0 2;-1 0 1];mask4=[0 1 2;-1 0 1;-2 -1 0];mask5=[1 2 1;0 0 0;-1 -2 -1];mask6=[2 1 0;1 0 -1;0 -1 -2];mask7=[1 0 -1;2 0 -2;1 0 -1];mask8=[0 -1 -2;1 0 -1;2 1 0];d1 = imfilter(I, mask1); % 计算8个领域的灰度变化d2 = imfilter(I, mask2);d3 = imfilter(I, mask3);d4 = imfilter(I, mask4);d5 = imfilter(I, mask5);d6 = imfilter(I, mask6);d7 = imfilter(I, mask7);d8 = imfilter(I, mask8);dd = max(abs(d1),abs(d2)); % 取差值变化最大的元素组成灰度变化矩阵dd = max(dd,abs(d3));dd = max(dd,abs(d4));dd = max(dd,abs(d5));dd = max(dd,abs(d6));dd = max(dd,abs(d7));dd = max(dd,abs(d8));grad = mat2gray(dd); % 将灰度变化矩阵转化为灰度图像BB = grad;FW=median(BB(:))/0.6745;B = BB.*BB;B = sum(B(:));FX= sqrt(B/256^2);FS=sqrt(max(FX^2-FW^2,0));T=sqrt(2)*FW^2/FS; % 计算最佳阈值grad = mat2gray(BB); % 将梯度矩阵转化为灰度图像BW2=im2bw(grad,T); % 用最佳阈值分割梯度图像subplot(2,4,8);imshow(BW2); % 显示分割后的图像,即边缘图像title('sobel改进算子');加入椒盐噪声的边缘检测程序:function jingdianI=imread('lenna.bmp');I1=imnoise(I,'salt & pepper');%添加椒盐噪声,默认值为0.02 figure,imshow(I1);%添加均值为0、方差0.002的高斯噪声title('添加椒盐噪声后原图')B1=edge(I1,'roberts');B2=edge(I1,'sobel');B3=edge(I1,'prewitt');B4=edge(I1,'canny');B5=edge(I1,'log');subplot(2,3,1);imshow(B1);title('roberts算子检测');subplot(2,3,2);imshow(B2);title('sobel算子检测');subplot(2,3,3);imshow(B3);title('prewitt算子检测');subplot(2,3,4);imshow(B4);title('canny算子检测');subplot(2,3,5)imshow(B5);title('log算子检测');B1=edge(I1,'roberts');%调用roberts算子检测图像B2=edge(I1,'sobel');%调用soble算子进行边缘检测B3=edge(I1,'prewitt');%调用prewitt算子进行边缘检测B4=edge(I1,'canny');%调用canny算子对图像进行边缘检测B5=edge(I1,'log');%调用log算子对图像进行边缘检测subplot(2,3,1);%设置图像布局imshow(B1);title('roberts算子检测');%现实图像并命名为roberts算子检测subplot(2,3,2);imshow(B2);title('sobel算子检测');subplot(2,3,3);imshow(B3);title('prewitt算子检测');subplot(2,3,4);imshow(B4);title('canny算子检测');subplot(2,3,5)imshow(B5);title('log算子检测');mask1=[-1 -2 -1;0 0 0;1 2 1]; % 建立方向模板mask2=[-2 -1 0;-1 0 1;0 1 2];mask3=[-1 0 1;-2 0 2;-1 0 1];mask4=[0 1 2;-1 0 1;-2 -1 0];mask5=[1 2 1;0 0 0;-1 -2 -1];mask6=[2 1 0;1 0 -1;0 -1 -2];mask7=[1 0 -1;2 0 -2;1 0 -1];mask8=[0 -1 -2;1 0 -1;2 1 0];I = im2double(I1); % 将数据图像转化为双精度d1 = imfilter(I, mask1); % 计算8个领域的灰度变化d2 = imfilter(I, mask2);d3 = imfilter(I, mask3);d4 = imfilter(I, mask4);d5 = imfilter(I, mask5);d6 = imfilter(I, mask6);d7 = imfilter(I, mask7);d8 = imfilter(I, mask8);dd = max(abs(d1),abs(d2)); % 取差值变化最大的元素组成灰度变化矩阵dd = max(dd,abs(d3));dd = max(dd,abs(d4));dd = max(dd,abs(d5));dd = max(dd,abs(d6));dd = max(dd,abs(d7));dd = max(dd,abs(d8));grad = mat2gray(dd); % 将灰度变化矩阵转化为灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 用阈值分割梯度图像BB = grad;FW=median(BB(:))/0.6745;B = BB.*BB;B = sum(B(:));FX= sqrt(B/256^2);FS=sqrt(max(FX^2-FW^2,0));T=sqrt(2)*FW^2/FS; % 计算最佳阈值grad = mat2gray(BB); % 将梯度矩阵转化为灰度图像BW2=im2bw(grad,T); % 用最佳阈值分割梯度图像subplot(2,3,6);imshow(BW2); % 显示分割后的图像,即边缘图像title('加入椒盐噪声的sobel改进算子');。
Matlab实现:图像边缘提取

Matlab实现:图像边缘提取1、边缘提取算法⽅法⼀:⼀阶微分算⼦Sobel算⼦Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,Sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素。
Roberts算⼦Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确。
Prewitt算⼦Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多。
Canny算⼦Canny算⼦是⽬前边缘检测最常⽤的算法,效果也是最理想的。
Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⽅法⼆:⼆阶微分算⼦Laplacian算⼦Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区。
2、实验结果分析⼀、边缘提取:Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素;Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确;Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多;Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区;Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⼆、边缘复合增强Sobel、Robert、Prewitt算⼦的增强效果并不是很明显,尤其是Robert算⼦,因为它提取的边缘点过于稀疏和离散;Laplacian算⼦和canny算⼦的增强效果都⽐较理想,将边缘叠加上去后,整个⼿的轮廓和边缘都很清晰,直观上看,canny算⼦实现的效果⽐Laplacian算⼦好,最明显的地⽅就是⼿指尖的边缘。
关于MATLAB边缘检测sobel算子

关于MATLAB边缘检测sobel算子一、sobel介绍索贝尔算子是图像处理中的算子之一,主要用作边缘检测。
在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。
在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
如果以代表原始图像,及分别代表经横向及纵向边缘检测的图像,其公式如下:图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。
然后可用以下公式计算梯度方向。
在以上例子中,如果以上的角度等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
二、程序例1clear all;close all;f=imread('dsy.jpg');u=rgb2gray(f);F=double(f);U=double(u);[H,W]=size(u);uSobel=u;% ms=0;% ns=0;for i=2:H-1for j=2:W-1Gx=(U(i+1,j-1)+2*U(i+1,j)+F(i+1,j+1))-(U(i-1,j-1)+2*U(i-1,j)+F(i-1,j+1));Gy=(U(i-1,j+1)+2*U(i,j+1)+F(i+1,j+1))-(U(i-1,j-1)+2*U(i,j-1)+F(i+1,j-1));uSobel(i,j)=sqrt(Gx^2+Gy^2);% ms=ms+uSobel(i,j);% ns=ns+(uSobel(i,j)-ms)^2;endend% ms=ms/(H*W);% ns=ns/(H*W);subplot(1,2,1);imshow(f);title('原图');subplot(1,2,2);imshow(im2uint8(uSobel));title('Sobel处理后');% S=[ms ns];程序运行结果:例2hg=zeros(3,3); %设定高斯平滑滤波模板的大小为3*3delta=0.5;for x=1:1:3for y=1:1:3u=x-2;v=y-2;hg(x,y)=exp(-(u^2+v^2)/(2*pi*delta^2));endendh=hg/sum(hg(:));g = imread('jjj.jpg ');f=rgb2gray(im2double(g));subplot(2,2,1),imshow(f)title('原始图像');[m,n]=size(f);ftemp=zeros(m,n);rowhigh=m-1;colhigh=n-1;%%%高斯滤波%%%for x=2:1:rowhigh-1for y=2:1:colhigh-1mod=[f(x-1,y-1) f(x-1,y) f(x-1,y+1); f(x,y-1) f(x,y) f(x,y+1);f(x+1,y-1) f(x+1,y) f(x+1,y+1)];A=h.*mod;ftemp(x,y)=sum(A(:));endendf=ftempsubplot(2,2,2),imshow(f)title('高斯滤波器后的图像');%%%%3*3的soble算子%%%%%%%%sx=[-1 -2 -1;0 0 0;1 2 1];sy=[-1 0 1;-2 0 2;-1 0 1];for x=2:1:rowhigh-1for y=2:1:colhigh-1mod=[f(x-1,y-1) f(x-1,y) f(x-1,y+1); f(x,y-1) f(x,y) f(x,y+1);f(x+1,y-1) f(x+1,y) f(x+1,y+1)];fsx=sx.*mod;fsy=sy.*mod;ftemp(x,y)=max((abs(sum(fsx(:)))),(abs(sum(fsy(:)))));endendfs=im2uint8(ftemp);subplot(2,2,3),imshow(fs)title('用soble检测的原始图像');%%%域值分割%%%TH2=30; %设定阈值for x=2:1:rowhigh-1for y=2:1:colhigh-1if (fs(x,y)>=TH2)&((fs(x,y-1) <= fs(x,y)) & (fs(x,y) > fs(x,y+1)) )fs(x,y)=200;elseif(fs(x,y)>=TH2)&( (fs(x-1,y) <=fs(x,y)) & (fs(x,y) >fs(x+1,y))) fs(x,y)=200;else fs(x,y)=50;endendendsubplot(2,2,4),imshow(fs)title('用soble检测并细化后的图像')。
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释1.引言1.1 概述边缘检测是图像处理中的一个重要任务,它广泛应用于计算机视觉、图像分析和模式识别等领域。
边缘检测的目标是找到图像中不同区域之间的边界,并将其表示为像素强度的变化。
Canny边缘检测算法是一种经典且常用的边缘检测方法。
它通过一系列的图像处理步骤来提取图像中的边缘信息。
Canny算法的特点是能够检测出细且准确的边缘,并且对于图像中的噪声具有较好的抵抗能力。
Matlab是一种功能强大的数学软件,广泛应用于科学计算、数据可视化和图像处理等领域。
Matlab提供了丰富的图像处理函数和工具箱,其中包括了Canny边缘检测的实现代码。
本文的主要目的是介绍Matlab中Canny边缘检测的代码实现,并结合Hough变换算法进行边缘检测的应用。
通过使用Matlab中的相关函数和工具,我们可以有效地实现Canny边缘检测,并结合Hough变换来进一步处理和分析图像中的边缘特征。
本文将首先回顾Canny边缘检测算法的原理和步骤,然后介绍Matlab中的Canny边缘检测代码的使用方法。
接着,我们将介绍Hough 变换算法的原理和应用,并展示如何将Canny边缘检测与Hough变换相结合来实现更精确的边缘检测。
最后,我们将对Canny边缘检测和Hough变换的优缺点进行讨论,总结这两种方法在边缘检测中的应用。
同时,我们也将展望未来的研究方向,探讨如何进一步改进和优化边缘检测算法,以满足不断发展的图像处理需求。
通过阅读本文,读者将能够理解Canny边缘检测算法和Hough变换算法的原理,掌握Matlab中相关代码的使用方法,并了解边缘检测在实际应用中的优势和局限性。
希望本文能为读者在图像处理领域的学习和研究提供一定的帮助和启示。
文章结构是指文章的整体框架和组织形式。
一个良好的文章结构可以使读者更好地理解和领会文章的内容,同时也有助于文章的逻辑性和条理性。
MATLAB的边缘检测函数中隐含的细化(非极大值抑制)算法
MATLAB的边缘检测函数中隐含的细化(⾮极⼤值抑制)算法前段时间做了⼀个车牌检测识别的项⽬,我的任务是将MATLAB中的算法移植成C++代码。
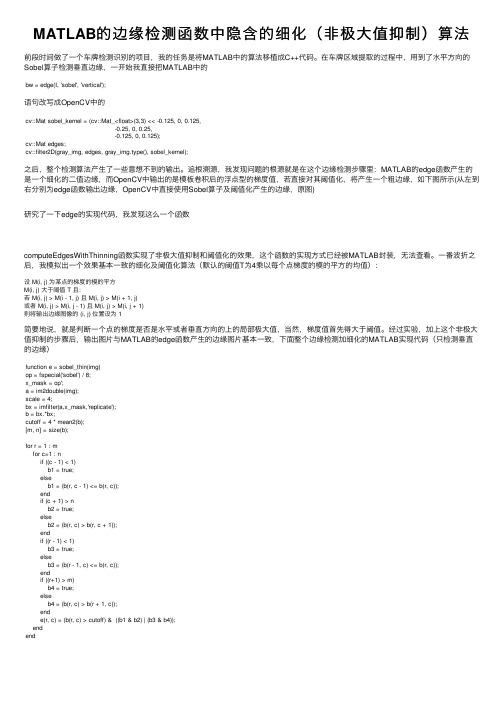
在车牌区域提取的过程中,⽤到了⽔平⽅向的Sobel算⼦检测垂直边缘,⼀开始我直接把MATLAB中的bw = edge(I, 'sobel', 'vertical');语句改写成OpenCV中的cv::Mat sobel_kernel = (cv::Mat_<float>(3,3) << -0.125, 0, 0.125,-0.25, 0, 0.25,-0.125, 0, 0.125);cv::Mat edges;cv::filter2D(gray_img, edges, gray_img.type(), sobel_kernel);之后,整个检测算法产⽣了⼀些意想不到的输出。
追根溯源,我发现问题的根源就是在这个边缘检测步骤⾥:MATLAB的edge函数产⽣的是⼀个细化的⼆值边缘,⽽OpenCV中输出的是模板卷积后的浮点型的梯度值,若直接对其阈值化,将产⽣⼀个粗边缘,如下图所⽰(从左到右分别为edge函数输出边缘,OpenCV中直接使⽤Sobel算⼦及阈值化产⽣的边缘,原图)研究了⼀下edge的实现代码,我发现这么⼀个函数computeEdgesWithThinning函数实现了⾮极⼤值抑制和阈值化的效果,这个函数的实现⽅式已经被MATLAB封装,⽆法查看。
⼀番波折之后,我模拟出⼀个效果基本⼀致的细化及阈值化算法(默认的阈值T为4乘以每个点梯度的模的平⽅的均值):设 M(i, j) 为某点的梯度的模的平⽅M(i, j) ⼤于阈值 T 且:若 M(i, j) > M(i - 1, j) 且 M(i, j) > M(i + 1, j)或者 M(i, j) > M(i, j - 1) 且 M(i, j) > M(i, j + 1)则将输出边缘图像的 (i, j) 位置设为 1简要地说,就是判断⼀个点的梯度是否是⽔平或者垂直⽅向的上的局部极⼤值,当然,梯度值⾸先得⼤于阈值。
Sobel、Prewitt、Roberts算子的边缘检测
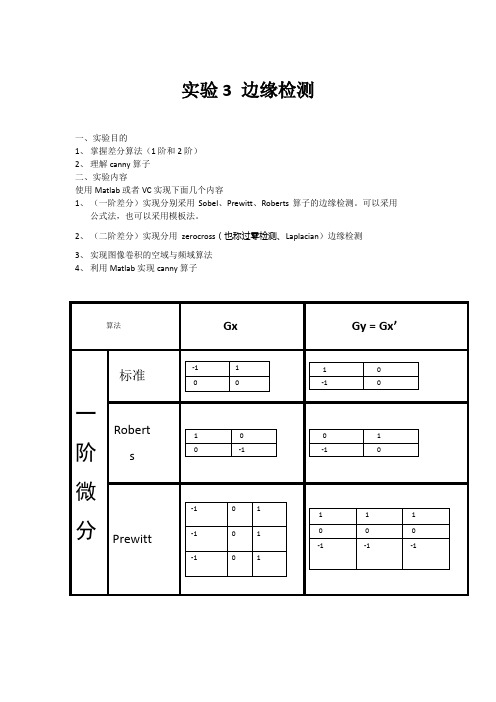
实验3 边缘检测一、实验目的1、掌握差分算法(1阶和2阶)2、理解canny算子二、实验内容使用Matlab或者VC实现下面几个内容1、(一阶差分)实现分别采用Sobel、Prewitt、Roberts算子的边缘检测。
可以采用公式法,也可以采用模板法。
2、(二阶差分)实现分用zerocross(也称过零检测、Laplacian)边缘检测3、实现图像卷积的空域与频域算法4、利用Matlab实现canny算子三、实验程序1.(一阶差分)%% Sobel算子clear;sourcePic=imread('111.jpg');%读取原图像grayPic=mat2gray(sourcePic);%实现图像矩阵的归一化操作[m,n]=size(grayPic);newGrayPic=grayPic;%为保留图像的边缘一个像素sobelNum=0;%经sobel算子计算得到的每个像素的值sobelThreshold=0.8;%设定阈值for j=2:m-1 %进行边界提取for k=2:n-1sobelNum=abs(grayPic(j-1,k+1)+2*grayPic(j,k+1)+grayPic(j+1,k+1)- ..., grayPic(j-1,k-1)-2*grayPic(j,k-1)-grayPic(j+1,k-1))+abs( ...,grayPic(j-1,k-1)+2*grayPic(j-1,k)+grayPic(j-1,k+1)-grayPic(j+1,k-1) ...,-2*grayPic(j+1,k)-grayPic(j+1,k+1));if(sobelNum > sobelThreshold)newGrayPic(j,k)=255;elsenewGrayPic(j,k)=0;endendendfigure,imshow(newGrayPic);title('Sobel算子的处理结果')%% Prewitt算子clear;sourcePic=imread('111.jpg');%读取原图像grayPic=mat2gray(sourcePic);%实现图像矩阵的归一化操作[m,n]=size(grayPic);newGrayPic=grayPic;%为保留图像的边缘一个像素PrewittNum=0;%经Prewitt算子计算得到的每个像素的值PrewittThreshold=0.5;%设定阈值for j=2:m-1 %进行边界提取for k=2:n-1PrewittNum=abs(grayPic(j-1,k+1)-grayPic(j+1,k+1)+grayPic(j-1,k) ...,-grayPic(j+1,k)+grayPic(j-1,k-1)-grayPic(j+1,k-1))+abs ...,(grayPic(j-1,k+1)+grayPic(j,k+1)+grayPic(j+1,k+1)-grayPic(j-1,k-1) ...,-grayPic(j,k-1)-grayPic(j+1,k-1));if(PrewittNum > PrewittThreshold)newGrayPic(j,k)=255;elsenewGrayPic(j,k)=0;endendendfigure,imshow(newGrayPic);title('Prewitt算子的处理结果')%% Roberts算子clear;sourcePic=imread('111.jpg'); %读取原图像grayPic=mat2gray(sourcePic); %实现图像矩阵的归一化操作[m,n]=size(grayPic);newGrayPic=grayPic;%为保留图像的边缘一个像素robertsNum=0; %经roberts算子计算得到的每个像素的值robertThreshold=0.2; %设定阈值for j=1:m-1 %进行边界提取for k=1:n-1robertsNum = abs(grayPic(j,k)-grayPic(j+1,k+1)) + abs(grayPic(j+1,k)-grayPic(j,k+1));if(robertsNum > robertThreshold)newGrayPic(j,k)=255;elsenewGrayPic(j,k)=0;endendendfigure,imshow(newGrayPic);title('roberts算子的处理结果')2.(2阶算子)I=imread('111.jpg'); %读取图像I1=im2double(I); %将彩图序列变成双精度I2=rgb2gray(I1); %将彩色图变成灰色图[thr, sorh, keepapp]=ddencmp('den','wv',I2);I3=wdencmp('gbl',I2,'sym4',2,thr,sorh,keepapp); %小波除噪I4=medfilt2(I3,[9 9]); %中值滤波I5=imresize(I4,0.8,'bicubic'); %图像大小h=fspecial('gaussian',5); %高斯滤波BW=edge(I5,'zerocross',[ ],h); %zerocross 图像边缘提取figure;imshow(BW);title('Zerocross');3.图像卷积的空域与时域算法inimg = imread('cameraman.tif');subplot(131)imshow(inimg), title('Original image')[M,N] = size(inimg); % Original image size%====================================================================h = fspecial('gaussian',25,4); % Gaussian filter%====================================================================% 空域滤波gx = imfilter(inimg,h,'same','replicate'); % 空域图像滤波subplot(132)imshow(gx,[]);title('Spatial domain filtering')%====================================================================% 频域滤波%====================================================================h_hf = floor(size(h)/2); % 空域滤波器半高/宽imgp = padarray(inimg, [h_hf(1),h_hf(2)],'replicate'); % Padding boundary with copying pixelsPQ = 2*size(imgp);Fp = fft2(double(imgp), PQ(1), PQ(2)); % 延拓图像FFTP = PQ(1); Q = PQ(2);center_h = h_hf+1; % 空域小模板h中心位置hp = zeros(P,Q); % 预分配内存,产生P×Q零矩阵hp(1:size(h,1),1:size(h,2)) = h; % h置于hp左上角hp = circshift(hp,[-(center_h(1)-1),-(center_h(2)-1)]); % 循环移位,h中心置于hp左上角%====================================================================Hp = fft2(double(hp)); % hp滤波器做FFT%====================================================================Gp = Hp.*Fp; % 频域滤波gp = real(ifft2(Gp)); % 反变换,取实部gf = gp(h_hf(1)+1:M+ h_hf(1), h_hf(2)+1:N + h_hf(2)); % 截取有效数据subplot(133)imshow(uint8(gf),[]), title('Frequency domain filtering')% 注:以上处理中,频域图像Fp与滤波器Hp均未中心化,因此,返回空域时无需反中心化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于MATLAB边缘检测sobel算子
一、sobel介绍
索贝尔算子是图像处理中的算子之一,主要用作边缘检测。
在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。
在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
如果以代表原始图像,及分别代表经横向及纵向边缘检测的图像,其公式如下:
图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。
然后可用以下公式计算梯度方向。
在以上例子中,如果以上的角度等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
二、程序
例1
clear all;
close all;
f=imread('dsy.jpg');
u=rgb2gray(f);
F=double(f);
U=double(u);
[H,W]=size(u);
uSobel=u;
% ms=0;
% ns=0;
for i=2:H-1
for j=2:W-1
Gx=(U(i+1,j-1)+2*U(i+1,j)+F(i+1,j+1))-(U(i-1,j-1)+2*U(i-1,j)+F(i-1,j+1));
Gy=(U(i-1,j+1)+2*U(i,j+1)+F(i+1,j+1))-(U(i-1,j-1)+2*U(i,j-1)+F(i+1,j-1));
uSobel(i,j)=sqrt(Gx^2+Gy^2);
% ms=ms+uSobel(i,j);
% ns=ns+(uSobel(i,j)-ms)^2;
end
end
% ms=ms/(H*W);
% ns=ns/(H*W);
subplot(1,2,1);imshow(f);title('原图');
subplot(1,2,2);imshow(im2uint8(uSobel));title('Sobel处理后');
% S=[ms ns];
程序运行结果:
例2
hg=zeros(3,3); %设定高斯平滑滤波模板的大小为3*3
delta=0.5;
for x=1:1:3
for y=1:1:3
u=x-2;
v=y-2;
hg(x,y)=exp(-(u^2+v^2)/(2*pi*delta^2));
end
end
h=hg/sum(hg(:));
g = imread('jjj.jpg ');
f=rgb2gray(im2double(g));
subplot(2,2,1),imshow(f)
title('原始图像');
[m,n]=size(f);
ftemp=zeros(m,n);
rowhigh=m-1;
colhigh=n-1;
%%%高斯滤波%%%
for x=2:1:rowhigh-1
for y=2:1:colhigh-1
mod=[f(x-1,y-1) f(x-1,y) f(x-1,y+1); f(x,y-1) f(x,y) f(x,y+1);f(x+1,y-1) f(x+1,y) f(x+1,y+1)];
A=h.*mod;
ftemp(x,y)=sum(A(:));
end
end
f=ftemp
subplot(2,2,2),imshow(f)
title('高斯滤波器后的图像');
%%%%3*3的soble算子%%%%%%%%
sx=[-1 -2 -1;0 0 0;1 2 1];
sy=[-1 0 1;-2 0 2;-1 0 1];
for x=2:1:rowhigh-1
for y=2:1:colhigh-1
mod=[f(x-1,y-1) f(x-1,y) f(x-1,y+1); f(x,y-1) f(x,y) f(x,y+1);f(x+1,y-1) f(x+1,y) f(x+1,y+1)];
fsx=sx.*mod;
fsy=sy.*mod;
ftemp(x,y)=max((abs(sum(fsx(:)))),(abs(sum(fsy(:)))));
end
end
fs=im2uint8(ftemp);
subplot(2,2,3),imshow(fs)
title('用soble检测的原始图像');
%%%域值分割%%%
TH2=30; %设定阈值
for x=2:1:rowhigh-1
for y=2:1:colhigh-1
if (fs(x,y)>=TH2)&((fs(x,y-1) <= fs(x,y)) & (fs(x,y) > fs(x,y+1)) )
fs(x,y)=200;
elseif(fs(x,y)>=TH2)&( (fs(x-1,y) <=fs(x,y)) & (fs(x,y) >fs(x+1,y))) fs(x,y)=200;
else fs(x,y)=50;
end
end
end
subplot(2,2,4),imshow(fs)
title('用soble检测并细化后的图像')。