第五章条件平差
平差基础-5-6
cot a v cot b v
sin b1 sin b2 sin b3 sin b4 " (1 ) 0 sin a1 sin a2 sin a3 sin a4
武汉大学测绘学院 孙海燕
第五章 条件平差
二、测边网条件方程 1、角度改正数与边长改正数的关系 由余弦定理知
2 Sa S b2 S c2 2S b S c cos A
(v S5 cos ABCv S1 cos ACBv S 2 )
cos ABD cos ABC cos ACB cos ACD v S1 v S2 h3 h1 h1 h2
a ,b , c
Z 0 Z 0 cot b1vb1 Z 0 cot a1va1 Z 0 cot b2 vb2 Z 0 cot a2 va2 Z 0 cot b3vb3 Z 0 cot a3va3 1 0
1 " cot bi vbi cot ai vai (1 0 ) 0 Z i 1 i 1
武汉大学测绘学院 孙海燕
第五章 条件平差
t 2, n 4, r 4 2 2 例5-3:
l4 500.090m
l1 200.010m
条件方程
ˆ l ˆ l ˆ 0 l 1 2 4 ˆ l ˆ 0 l 2 3
l2 300.050m
l3 300.070m
A
B
a1
A B
b1 a2
(i 1,2,3)
c1 c 2 c3
b3
D
a3
b2
C
2、圆周角条件
t 4, n 9, r 5
第5章附有条件的条件平差
按求条件极值的方法组成新的函数: 按求条件极值的方法组成新的函数: T ˆ ˆ Φ = V T PV − 2 K T ( AV + Bx − W ) − 2 K S (Cx − W x ) 分别对
V
和
ˆ x
求一阶偏导数并令一阶偏导数为零,得 求一阶偏导数并令一阶偏导数为零,
n×n n×1
∂Φ = 2V T P − 2 K T A = 0 ∂V
− − N bb = B T N aa1 B We = B T N aa1W u×u
u ×1
ˆ N bb x − C T K s − We = 0
− ˆ x = N bb1 (C T K s + We )
(d )
6
第五章 附有条件的条件平差
§5-2 精度评定
一、单位权方差估值的计算公式
V T PV V T PV ˆ σ = = r c−u + s
u×c c×1 u ×s s×1
基础方 程
B T K+ C T K S= 0
u ×c c×1
u× s
s×u u ×1
ˆ C x − Wx = 0
s×1
s×1
由(3 )得: 改正数方 程 V = P −1 AT K = QAT K
n×1
法方程
法方程的矩阵形式: 法方程的矩阵形式:
代入(1): 代入(
c×n n×n n×c
2010-11-15
− ˆ V T PV = W T N aa1W − WeT x + W xT K s
7
第五章 附有条件的条件平差
§5-2 精度评定
二、各种向量的协因数阵
ˆ ˆ 基本向量: L,W,X,K,K s,V,L 基本向量:
第五章条件平差
令
a1 b A= 1 ⋅⋅⋅ r 1 a2 b2 ⋅⋅⋅ r2 ⋅⋅⋅ ⋅⋅⋅ ⋅⋅⋅ ⋅⋅⋅ an bn ⋅⋅⋅ rn
v1 Wa Wb v W = ,V = 2 M M W v r n
第五章
条件平差
第一节
条件平差原理 2
第二节 第三节
条件方程 16 精度评定 39
第四节
条件平差公式汇编和水准网平差示例
第一节
条件平差的函数模: 条件平差的函数模:
r ,n n,1
条件平差原理
或
A∆ −W = 0
~ A L+ A0 = O
r ,1 r ,1
~ ˆ 当 L 的估值为 L ,∆的估值为V时,则有 的估值为 时
v L an 1 wa v L bn 2 + w b = 0 M L cn wc v n
组成新函数: 组成新函数:
K与方程个数相同 与方程个数相同
2 2 Φ = [ p 1 v 12 + p 2 v 2 + L + p n v n ]− 2k a ( [av ] + w a )
一、条件平差原理
设有r个 设有 个平差值线性条件方程
ˆ ˆ ˆ a1L1 + a2 L2 +L+ anLn + a0 = 0 ˆ + b L +L+ b L + b = 0 ˆ ˆ b1L1 2 2 n n 0 L L L L L L L ˆ ˆ ˆ r1L1 + r2 L2 +L+ rnLn + r0 = 0
第五章 条件平差
cot
a3
va3
sin a1 sin b1
sin sin
a2 b2
sin sin
a3 b3
cot
b1
vb1
sin a1 sin b1
sin sin
a2 b2
sin sin
a3 b3
cot
b2
vb2
sin a1 sin b1
sin sin
a2 b2
sin a3 sin b3
cot
b3
vb3
0
cot a1va1 cot a2va2 cot a3va3 cot b1vb1 cot b2vb2 cot b3vb3
§5-2 条件方程
4.水准网中条件方程的列立方法
• 列条件方程的原则:足数、独立、最简 • (1)先列附合条件,再列闭合条件 • (2)附合条件按测段少的路线列立,附合条件的个
数等于已知点的个数减1 • (3)闭合条件按小环建立(保证最简),一个水准
网中有多少小环,就列多少个闭合条件。
§5-2 条件方程
• (2)极条件
A a4 b4
a1 B b1
AB AC AD 1 0
AC AD AB
D b3a3
sin aˆ2 sin(aˆ3 bˆ3) sin aˆ1 sin(aˆ1 bˆ1) sin bˆ2 sin bˆ3
1
0
b2a2 C
cot a2va2 cot(a3 b3 ) (va3 vb3 ) cot a1va1
• 原则:将复杂图形分解成典型图形
三角形
大地四边形
中心多边形
§5-2 条件方程
7.条件方程的类型
• 图形条件(内角和条件):三角形内角和等于180 • 圆周条件(水平条件):圆周角等于360 • 极条件(边长条件):由不同推算路线得到的同一
测量平差第五章
式中常数项为:
wa a1 L1 a2 L2 an Ln a0 wb b1 L1 b2 L2 bn Ln b0 wr r1 L1 r2 L2 rn Ln r0
§5.1 条件平差原理
ˆ ˆ H h ˆH C A 1
一般地,设平差值函数为:
§5.3 精度评定
—— 称为权函数式! 其矩阵形式为:
§5.3 精度评定
§5.3 精度评定
1 1 1 0 0 0 A 0 0 0 1 1 1
§5.3 精度评定
例(补)已知:
ˆ 和 求:L ˆ ˆ
PC
1.求观测量的平差值:
§5.2 条件方程
1.以角度改正数表示的图形条件方程 ˆ ˆ ˆ 360 0 1 2 3
ˆ ˆ ˆ 0 1 2 3
v1 v2 v3 w 0
w 1 2 3
v1 v2 v3 w பைடு நூலகம் 0
w 1 2 3 360
①列立条件方程式
PE
ˆ L 573216 1 ˆ 73 0308 L2 1 1 1 1 ˆ 360 0 W AL A0 [1 1 1 1]12651 28 360 12 L 3 ②组成并解算法方程 102 3 3 2 0 ˆ L4
2.解决问题的基本思想 根据 i2 02Qii 知:
2 要计算平差值函数的中误差,首先要求出 0 ;
最后,根据Q ˆ ˆ 求得平差值函数的中误差 ˆ。
然后,根据协因数传播律求出平差值函数 ˆ 的协因数 Qˆˆ ;
§5.3 精度评定
第五章条件平差
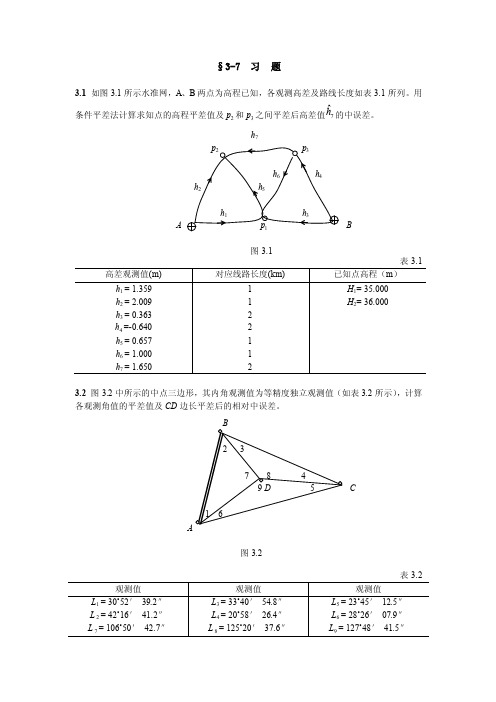
§3-7 习 题3.1 如图3.1所示水准网,A 、B 两点为高程已知,各观测高差及路线长度如表3.1所列。
用条件平差法计算求知点的高程平差值及p 2和p 3之间平差后高差值7ˆh 的中误差。
表3.13.2 图3.2中所示的中点三边形,其内角观测值为等精度独立观测值(如表3.2所示),计算各观测角值的平差值及CD 边长平差后的相对中误差。
表3.23.3 如图3.3所示单一附合导线,起算数据和观测值如表3.3所示,测角中误差为±3″,测边标称精度为±(5+5D )mm ,按条件平差法计算各导线点的坐标平差值,并评定3点平差后的点位精度。
表3.33.4 设某平差问题是按条件平差法进行的,其法方程式为:⎥⎦⎤⎢⎣⎡--42210⎥⎦⎤⎢⎣⎡21k k +⎥⎦⎤⎢⎣⎡66=0试求:(1)单位权中误差0m ;(2)若已知某一平差函数式L f F t ˆ=,并计算得[]p ff /=44,[]p af /=16,[]p bf /=4,试求该平差值函数的权倒数F p /1及其中误差F m 。
3.5 有三角网(如图3.5),其中B 、C 为已知点,A 、D 、E 为待定点,观测角i L (i =1,2,…,10),(1)试写出AD 边的权函数式; (2)设观测值同精度,且E Q LL =,已知方位角BC a 无误差,试求平差后BE a 的权倒数。
3.6 试按条件平差法求证在单一水准路线(如图3.6)中,平差后高程最弱点在水准路线中央。
3.7 已知条件式为0=+W AV ,其中AL W =,观测值协因数阵为1-=P Q LL ,现有函数式)(V L f F T +=,(1) (1) 试求:FF Q ;(2) (2) 试证: V 和F 是互不相关的。
3.8 有独立测边网(如图3.8),边长观测值列于下表。
试按条件平差法求出改正数i S V 以及边长平差值。
(已知E Q S =)。
表3.8。
测量程序设计_条件平差和间接平差
程序代码如下:
disp(‘-------水准网间接平差示例-------------’) disp(‘已知高程’) Ha = 5.015 % 已知点高程,单位m Hb = 6.016 % 已知点高程,单位m
A h2 D h1
C h6 E h7 B h4
h5
h3
disp(‘观测高差,单位m’)
L = [1.359; 2.009; 0.363; 1.012; 0.657; -0.357] disp(‘系数矩阵B’)
则: PV AT K
V P A K QA K
T
1 T
4、法方程: 将条件方程 AV+W=0代入到改正数方程V=QATK 中,则得到:
AQAT K W 0
r1 r1 r1
记作: 由于
N aa K W 0
rr
R( Naa ) R( AQAT ) R( A) r
Naa为满秩方阵, K Naa1W ( AQAT )1 ( AL A0 )
if H(1,1)+H(2,1)-H(3,1)+HA-HB==0 && H(2,1)H(4,1)==0 disp(‘检核正确') else disp(‘检核错误') end disp(‘平差后的高程值') HC = HA + H(1,1) HD = HA + H(1,1) + H(4,1)
二、间接平差的基本原理
其中l=L-d.
ˆ 设误差Δ和参数X的估计值分别为V 和 X
则有
ˆ V AX l
X0 为了便于计算,通常给参数估计一个充分接近的近似值
ˆ ˆ X X0 x
则误差方程表示为
测量平差 第五章 条件平差

北京建筑工程学院 测绘工程系
求解法方程,求的联系数K
N aa K + W = 0
− K = − ( A P − 1 A T ) − 1 W = − N aa1W
回代求解观测值改正数
V = P −1 A T K = QA T K
观测值平差值
ˆ L = L +V
误差理论与测量平差基础
北京建筑工程学院 测绘工程系
四、条件平差的计算步骤
1. 首先确定条件方程的个数 r=n-t
ˆ 列出平差值条件方程式, AL + Ao = 0
列出改正数条件方程 AV + W = 0 定观测值的权阵P 2. 组成法方程式 4. 求改正数V值 5. 求出平差值 6. 检核
误差理论与测量平差基础
( AP −1 AT ) r×r K r×1 + W = 0
误差理论与测量平差基础
北京建筑工程学院 测绘工程系
水准网平差例2 A
h1
t = 7 −1− 3 = 3
C
h3
r = n−t = 7−3= 4
E
h2 h6 h5
符合条件方程
G
h4
h7
F D
B
ˆ ˆ ˆ h1 + h2 − h3 − ( H C − H A ) = 0 ⎫ ⎪ ˆ + h − h −( H − H ) = 0⎪ ˆ ˆ h1 6 7 B A ˆ + h + h − ( H − H ) = 0 ⎬ 闭合条件方 h7 ˆ 5 ˆ 4 ⎪ D B ⎪ ˆ ˆ ˆ h2 − h5 − h6 = 0 ⎭
矩阵计算基础知识 1. 向量 矩阵 2. 矩阵转置 3. 矩阵相乘 4. 矩阵微分 5. 矩阵求逆 6. 特殊矩阵 7. Matlab 矩阵计算
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、法方程及改正数方程
将V T PV min的原则作用于条件方程 。
组成新函数:
V T PV-2k T AV W
式中
r 1
k k a , kb , k r 条件方程联系数
T
对新函数求导: T T 2V P 2A k ---改正数方程
dSCD ˆ f T dL SCD ˆ SCD T 2 T ˆ f D f f QL ˆL ˆ ˆL ˆ f 0 L S CD
得测边相对中误差为: 3、大地四边形测角网
2
ˆS
CD
SCD
=
ˆ 0 f T QL ˆL ˆ f
设
F ( f1 , f 2 , f m )
T T
G ( g1 , g 2 , g m ) 有
均为m维向量函数,且 f i、g i 均为x的函数, d F G dG F T dG T dF F G dx dx dx dx
注意:当N为满秩方阵时,才有 N 1唯一存在,法方程才有唯
测方向网
测角网
测角网
三角网
测边网
测边长
测边+测方向
边角网
(导线网) 测边+测角
三、三角网的布设--从高级到低级逐级布设 四、三角网平差的方法 1。严密平差 ----遵守VTPV=min原则 ; 2。近似平差
5.3 测角网条件平差
独立网(经典自由网)---只有必要起算数据d。
非独立网(附合网)---已知条件超过必要起算数据。
3 图形条件: n=12 t=2×2+4=8 r =4 1 极条件:
v2 v1 v6 v5 v11 v10 W1 0
3、大地四边形
r = n-t = 12-8 = 4
图3 极1
三、附合测角网(非独立网)条件平差
附合条件数=多余已知数据个数
r n t r1 r2
24
3 6D 9
3个 图形条件: r 5 圆周角条件: 1个 极条件(边条件): 1个
1 8 A
5 7 C
极条件
以“D”点为极点,得平差值条件方程:
ˆ sin L ˆ sin L ˆ DB DC DA sin L 1 4 7 = 1 ˆ sin L ˆ sin L ˆ DA DB DC sin L 2 5 8
T
T
一解。所以,r个条件方程必须线性独立。
5.2 精度评定
一、单位权中误差
V PV V PV ˆ0 nt r T V PV的计算: (1 )直接法:V PV pvv p v
T i 1 n 2 i i
T
T
(2) 用N和k求: V PV QA k P QA k k Nk
T T QF f Q f f QL ˆF ˆ ˆ dL ˆ ˆL ˆ f dL
补充:控制测量概念 一、控制测量任务 1。为测绘地形图建立控制网 2。建立施工控制网 3。建立变形监测网
二、控制网的形式(按观测值分类)
1。高程控制网--水准网,三角高程网
2。平面控制网--三角网,导线网,GPS网
MATLAB平差应用简介
1、启动与退出
双击MATLAB图标,进入MATLAB命令窗口。
建立新文件:File-New-M-file进入编辑窗。
法1、直接编程,再用编辑窗Debug菜单中的Run运行,然后到命
令窗中看结果; 或法2、在编辑窗中编制函数,再在命令窗或另一个文件中调用。 建立文件: function[x,Qxx]=ABC(A,L,d,P); 文件名:ABC.m A,L,d,P—输入内容 x,Qxx:要求输出内容 分号:该句内容不显示
得基础方程:
V P 1 AT k AV W 0
由上式得法方程:
1 2
AP A k W 0
T
1
或 Nk W 0 kN W
1
其中,设N AP1 AT
k代入( 1)式,可得观测值改正 数V。
得观测值的平差值为:
ˆ L+V L
向量函数求导规律
三、平差值函数的权逆阵
ˆ f L ˆ ,L ˆ, ˆ 设有平差值的函数: F L 1 2 n ~ ˆ 在L的真值点L 展开,得权函数式:
i
ˆ f V f V f V F 1 1 1 2 2 2 n n n f TV f T V f f f 其中:f i L ˆ ˆ L i L i i
T T T T
T
(3)用W、k求: V PV V PQA k W k
T T T T
二、观测值 平差值及观测值改正数的权逆阵
T 1 T 1 ˆ L L V I QA N A L QA N A0
QL ˆL ˆ Q QA N AQ
T
1
V QAT k QAT N 1 AL A0 QVV QAT N 1 AQ
条件方程矩阵形式:
r n n1
A V W 0
r 1
r 1
一、条件方程的个数及选择
条件方程个数 = 多余观测数 = n-t = r
条件方程的选择:条件方程间应 线性无关。即条件方程
中的系数矩阵A阵应为行满秩阵。即 R A r 。
r n
平差值条件方程:
ˆA 0 AL 0
A0为已知的常数向量。
(必要起算数据个数d---水准网:d=1,测角网:d=4,测边、 边角网: d=3)
一、独立测角网按角度坐标平差 r = n-2p = n-t p:网中待定点数
1、单三角形
V1+V2+V3-W=0
-W=(L1+L2+L3-180)---图形条件 2、中点多边形测角网 n=9 , t=4 , r=5 B
2、矩阵的输入
A=[1 2 3;4 5 6;7 8 9]
同行的元素可用空格或逗号隔开,式中
分号也可换成击回车键。
可得:
1 2 3 A= 4 5 6 7 8 9
3、矩阵转置 A=A’ 4、矩阵求逆 M=inv(N) ---- M为N的逆阵
5、矩阵的+、-、×用符号+、-、*表示,运算时注意矩阵的阶
T
T
~ ˆ , L L V
QVV QF f ˆF ˆ f Q V Q QLL Q
T
T
QV f f Q
QVV QA N AQ
T -1
QV QVV QV QF AQf ˆF ˆ f Qf f QA N
r极 l 2 p 3 l--测角网中的总边数 p 网中所有点数(包括已 知点)
极条件仅存在于有角度观测值的控制网中。
二、测角网按方向条件平差(独立网)
必要观测数: t=2p+设站点数M 1、单三角形 n=6 t=2+3=5 2、中点多边形 r=1 p--待定点数
测方向网无圆周角条件。 测方向网的图形条件:
• CD边的相对中误差:
ˆ sin L ˆ sin L 2 8 ˆ =AB S CD ˆ sin L ˆ sin L 3 7 全微分后得: AB sin L2 sin L8 ˆ -cot L dL ˆ- dSCD= (cot L2 dL 2 3 3 sin L3 sin L7 ˆ +cot L dL ˆ) cot L7 dL 7 8 8 SCD ˆ -cot L dL ˆ -cot L dL ˆ +cot L dL ˆ) = (cot L2 dL 2 3 3 7 7 8 8 SCD T ˆ f dL
条件式个数:
r1--独立网条件个数 r2--附合条件数(强制附合条件)
强制附合条件r2一般有三种形式: (1)边长条件(基线条件) 条件方程个数=多余已知边数; (2)方位角条件(固定角条件) 条件方程个数=多余已知方位角个数; (3)纵横坐标条件 条件方程个数=多余已知点组个数的2倍
已知点组:用已知边和已知方位角将已知点连接在一起时,称为一 个已知点组。如附合导线就有两个已知点组。
数。
6、特殊矩阵产生
A=eye(n) ---- 产生n维单位阵
A=zeros(n,m) ----- 产生n×m维0矩阵 7、 B=det(A) A的行列式,A必须是方阵 B=rank(A) A的秩 B=trace(A) A的迹,A阵主元之和 8、输出格式 format shout 短格式,显示5位 。如:1.4142 format long 长格式,15位。如:1.41421356237310
T T T -1
f Q QA N AQ f
T T T -1
f QL ˆL ˆ f
求观测值的平差值函数的权逆阵过程可记忆为:
ˆ f L ˆ ,L ˆ, ˆ 设有平差值的函数: F L 1 2 n ~ ˆ 在L的真值点L 展开,得权函数式:
i
ˆ f dL ˆ f dL ˆ f dL ˆ F 1 1 2 2 n n ˆ f T dL f 其中:f i L ˆ ˆ i Li Li ˆ的权逆阵为 则F ˆ V , dL
线性化后的极条件:
cot L1V1 cot L4V4 cot L7V7 cot L2V2 cot L5V5 cot L8V8 W 0 sin L2 sin L5 sin L8 式中闭合差为: W 1 sin L sin L sin L 1 4 7
n=8,t=4,r=4