打印机打印轮_控制工程基础大作业
《控制工程基础》课程作业习题(含解答)
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
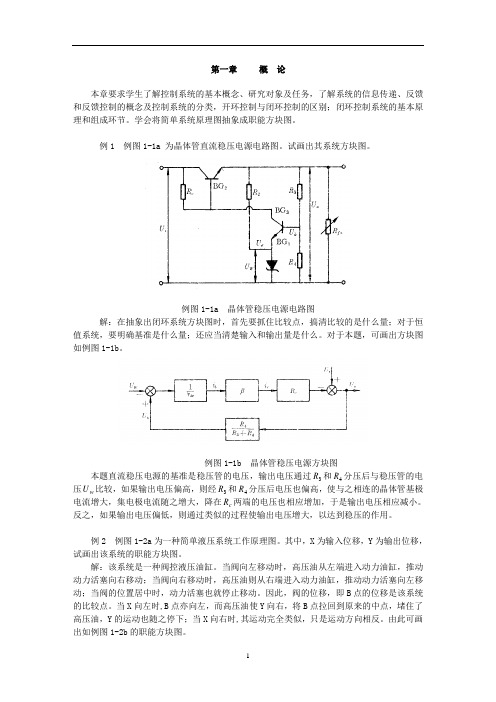
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
控制工程大作业(打印轮的控制分析)
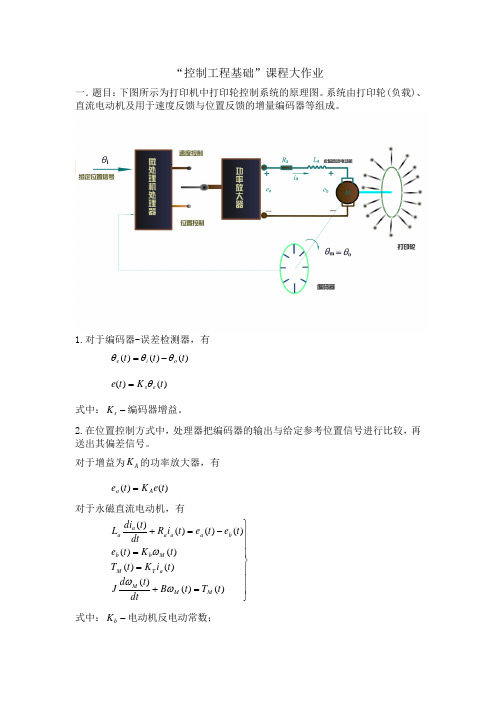
控制工程大作业(打印轮的控制分析)-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII控制工程基础大作业打印机中打印轮控制系统分析学院:机械工程及自动化学院班级:车辆工程2班姓名:学号:图1图1所示为打印机中打印轮控制系统的原理图。
系统由打印轮(负载)、直流电动机及用于速度反馈的增量编辑器等组成。
打印轮一般有96个字符位置。
控制打印轮的位置,就是使需要的字符放在硬拷贝打印锤前。
打印轮直接安装在电动机轴上能在正反两个方向旋转。
编码器是一种将直线或旋转位移变换为数码或脉冲信号的装置。
打印轮控制系统的控制目标是控制打印轮的位置。
其原理是:当给出打印某个字符的指令时,通过指令传输电路,控制系统首先将它转换成总距离及行进方向信号,然后命令电动机驱动打印轮去校正位置。
在此过程中,控制系统首先通过速度控制方式,驱动电动机打印轮系统按一定规律的转速旋转。
当负载驱动到希望的位置附近后,通过位置控制方式,把位置误差控制到零,驱动打印轮在没有延迟或过大震荡的条件下尽快精确到位。
对于编码器—误差检测器,有 )()()(t t t t o i θθθ-=....................)()(s t K t e e θ=......................② 式中:s K ——编码器增益。
在位置控制方式中,微处理机只不过把编码器的输出与给定参考位置进行比较,在送出与该两信号之差成比例的误差信号。
对于增益为A K 的功率放大器,有 )()(a t e K t e A =.........................③ 对于永磁直流电动机,有 )()()()(at e t e t i R dtt di L b a a a a -=+...............④ )()(t w K t e M b b =...............................⑤ )()(T t i K t T a M =................................⑥ )()()(t T t Bw dtt dw JM M M =+................⑦ 式中:b K ——电动机反电动势常数; T K ——电动机转矩常数; M w ——电动机转速; M T ——电动机输出转矩;J ——折算到电动机轴上的总转到惯量; B ——折算到电动机轴上的总粘贴阻尼系数; 其余符号意义见图1。
大工15秋《机械控制工程基础》在线作业1满分答案
大工15秋《机械控制工程基础》在线作业1满分答案大工15秋《机械控制工程基础》在线作业1一、单选题(共10道试题,共60分。
)1.系统的截止频率越大则()A.上升时间越小B.上升时间越大C.稳态误差越小D.快速性越好正确答案:A2.下面系统各环节的连接方式不对的是()A.串联连接B.并联连接C.反馈连接D.混合连接正确答案:D3.XXX图上以原点为圆心的单位圆对应于伯德图上面的()A. 5dB线B. 3dB线C. 1dB线D. 10dB线正确答案:C4.某二阶系统阻尼比为2,那么系统阶跃响应是()A.等幅振荡B.单调衰减C.振荡衰减D.振荡发散正确答案:B5.单位负反馈的开环传递函数为G(s),则其闭环系统的前向传递函数与()A.反馈传递函数相同B.闭环传递函数相同C.误差传递函数相同D.开环传递函数相同精确答案:D6.求线性定常系统的传递函数条件是()A.稳定条件B.零初始前提C.稳态前提D.瞬态前提正确答案:B7.控制框图的等效变换原则是变换前后()A.输入量和反馈量保持不变B.输出量和反馈量保持不变C.输入量和干扰量保持不变D.输入量和输出量坚持不变精确答案:D8.下面基本函数的传递函数不包括()A.积分环节B.一阶微分环节C.扩大环节D.延时环节精确答案:C9.一般开环控制系统是()A.不稳定系统B.时域体系C.频域体系D.稳定系统精确答案:D10.微分环节是高通率坡起,将使系统()A.增大干扰误差B.减小干扰误差C.增大阶跃输入误差D.减小阶跃输入误差精确答案:A大工15秋《机械控制工程基础》在线作业1二、多选题(共5道试题,共20分。
)1.有关频率特性,下面说法正确的有()A.能够看出幅值和相位随着频率变化 B.对数频率特性图是通用形式之一 C.对数幅相特性图是通用形式之一D.无法判断精确答案:ABC2.体系的误差可以分为()A.稳态误差B.瞬态误差C.动态误差D.静态误差精确答案:AC3.频率特性不包括()A.幅频特性B.延迟特性C.相频特性D.脉冲特性精确答案:BD4.允许误差的百分比通常取()A. ±5%B. ±2%C. ±20%D. ±15%正确答案:AB5.可以表征体系动态特性的有()A.频率特性B.惯性特性C.微分方程D.积分方程正确答案:ACD大工15秋《机械控制工程基础》在线作业1三、判断题(共5道试题,共20分。
“控制工程基础”大作业
“控制工程基础”课程大作业一.题目:下图所示为打印机中打印轮控制系统的原理图。
系统由打印轮(负载)、直流电动机及用于速度反馈与位置反馈的增量编码器等组成。
1.对于编码器-误差检测器,有)()()(t t t o i e θθθ-=)()(t K t e e s θ=式中:-s K 编码器增益。
2.在位置控制方式中,处理器把编码器的输出与给定参考位置信号进行比较,再送出其偏差信号。
对于增益为A K 的功率放大器,有)()(t e K t e A a =对于永磁直流电动机,有⎪⎪⎪⎭⎪⎪⎪⎬⎫=+==-=+)()()()()()()()()()()(t T t B dt t d J t i K t T t K t e t e t e t i R dt t di L M M M a T M M b b b a a a a aωωω 式中:-b K 电动机反电动常数;-T K 电动机转矩常数;-M ω电动机转速; -M T 电动机输出转矩;-J 折算到电动机轴上的总转动惯量;-B 折算到电动机轴上的总粘性阻尼系数。
电动机输出量为:)()(),()(t t t dtt d M o M M θθωθ== 二.问题1. 请画出以)(t i θ为输入,)(t o θ为输出的系统动态结构图,进而自行选取一组参数写出系统的数学模型(传递函数,三阶);2. 当0≈a L 时,重新求出系统简化的数学模型(传递函数,二阶);3. 应用matLab 软件分析该二阶系统在不同参数模型下的单位阶跃响应曲线,从而分析系统的动态性能(N M t t t p s p r ,,,,等);4. 应用matLab 软件对该二阶系统在不同参数模型下进行稳态分析(主要分析稳态误差);5. 应用matLab 软件对该二阶系统在不同参数模型下进行频域分析(主要应用Bode 图进行分析,分析其稳定裕量);6. 如参数模型不稳定或虽然稳定但性能指标(动态性能指标和稳态性能指标)不满足要求时,通过加入PID 控制使其稳定或满足性能指标要求,从而完成PID 校正设计。
吉大14秋学期《控制工程基础》在线作业一答案

吉大14秋学期《控制工程基础》在线作业一
单选题多选题判断题
一、单选题(共14 道试题,共56 分。
)
1. 若系统传递函数G(s)的所有零点和极点均在S平面的()时,则该系统称为最小相位系统。
A. 上半平面
B. 下半平面
C. 左半平面
D. 右半平面
-----------------选择:C
2. 一阶系统的传递函数为15/(4s+5),则系统的增益K和时间常数T依次为()。
A. 3.75,1.25
B. 3,0.8
C. 0.8,3
D. 1.25,3.75
-----------------选择:B
3. 一阶系统K/(1+Ts)的单位脉冲响应曲线在t=0处的斜率为()。
A. K/T
B. KT
C. -K/T2
D. K/T2
-----------------选择:C
4. 二阶系统的传递函数为G(s)=3/(4s2+s+100),其无阻尼固有频率ωn是()。
A. 10
B. 5
C. 2.5
D. 25
-----------------选择:B
5. 设ωc为幅值穿越(交界)频率,φ(ωc)为开环频率特性幅值为1时的相位角,则相位裕度为()。
A. 180°-φ(ωc)
B. φ(ωc)
C. 180°+φ(ωc)
D. 90°+φ(ωc)
-----------------选择:C
6. 当系统已定,并且输入已知时,求出系统的输出并通过输出来研究系统本身的有关问题称为()。
A. 最优控制
B. 系统辨识
C. 系统分析。
控制工程基础C作业2017
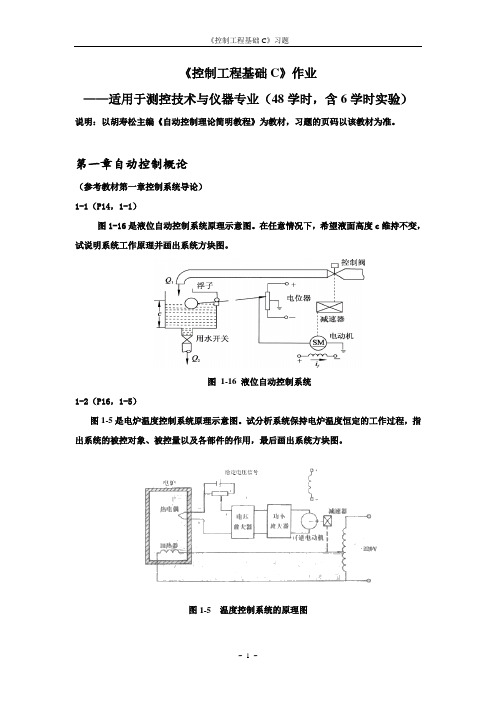
《控制工程基础C》作业——适用于测控技术与仪器专业(48学时,含6学时实验)说明:以胡寿松主编《自动控制理论简明教程》为教材,习题的页码以该教材为准。
第一章自动控制概论(参考教材第一章控制系统导论)1-1(P14,1-1)图1-16是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
图1-16 液位自动控制系统1-2(P16,1-5)图1-5是电炉温度控制系统原理示意图。
试分析系统保持电炉温度恒定的工作过程,指出系统的被控对象、被控量以及各部件的作用,最后画出系统方块图。
图1-5 温度控制系统的原理图第二章 控制系统的数学模型(参考教材第二章控制系统的数学模型) 2-1(P81,2-5)设弹簧特性由下式描述:F=12.65y 1.1,其中,F 是弹簧力;y 是变形位移。
若弹簧在形变位移0.25附近作微小变化,试推导Δy 的线性化方程。
2-2(P81,2-7)设系统传递函数为:2()2()32C s R s s s =++,且初始条件 (0)1(0)0c c =-=, 。
试求阶跃输入r (t )=1(t )时,系统的输出响应c (t )。
2-3(P81,2-8)如图,已知G(s)和H(s)两方框相对应的微分方程分别是:()610()20()dc t c t e t dt += ()205()10()db t b t c t dt+=且初始条件均为零,试求传递函数C(s)/R(s)及E(s)/R(s)。
2-4(P82,2-11(a )(b )(c ))已知控制系统结构图如图所示。
试通过结构图等效变换求系统传递函数C(s)/R(s)。
(a )(b )(c )2-5(p82,2-12(a ))试简化图中的系统结构图,并求系统传递函数C(s)/R(s)和C(s)/R(s)。
()N s2-6(p83,2-15(b )、(c ))试用梅森增益公式求图中各系统信号流图的传递函数C(s)/R(s)。
大工16秋《机械控制工程基础》在线作业2满分答案

大工16秋《机械控制工程基础》在线作业2
一、单选题(共 10 道试题,共 60 分。
)
1. 传递函数()描述系统内部中间变量的变化情况。
A. 可以
B. 不可以
C. 以上选项都对
D. 以上选项都不对
正确答案:B
2. 控制系统对单位阶跃输入的瞬态响应过程中,响应曲线超过其稳态值而达到第一个峰值所需的时间叫做()。
A. 延迟时间
B. 上升时间
C. 峰值时间
D. 调整时间
正确答案:C
3. 同一个线性系统对不同幅值阶跃输入的瞬态响应的响应时间()。
A. 相同
B. 不同
C. 以上选项都对
D. 以上选项都不对
正确答案:A
4. 能用一阶微分方程描述的系统称为()。
A. 一阶系统
B. 一元系统
C. 以上选项都对
D. 以上选项都不对
正确答案:A
5. 线性系统的性能指标取决于系统本身,与输入信号的大小()。
A. 有关
B. 无关
C. 以上选项都对
D. 以上选项都不对
正确答案:B
6. 在信号流程图上,利用梅逊公式()直接计算出系统的传递函数。
A. 可以
B. 不可以
C. 以上选项都对
D. 以上选项都不对
正确答案:A。
西南交《控制工程基础》离线作业

西南交《控制⼯程基础》离线作业控制⼯程基础第1次作业⼀、单项选择题(只有⼀个选项正确,共31道⼩题)1. 控制论的中⼼思想是(B )(A) 系统是由元素或⼦系统组成的(B) 机械系统与⽣命系统乃⾄社会经济系统等都有⼀个共同的特点,即通过信息的传递、加⼯处理,并利⽤反馈进⾏控制(C) 有些系统可控,有些系统不可控(D) 控制系统有两⼤类,即开环控制系统和闭环控制系统2. 闭环控制系统中( C)反馈作⽤.(A) 依输⼊信号的⼤⼩⽽存在(B) 不⼀定存在(C) 必然存在(D) ⼀定不存在3. 控制系统依不同的反馈情况可分为不同的类型,以下( B )的分类是正确的。
(A) 线性系统和离散系统(B) 开环系统和闭环系统(C) 功率放⼤系统和⼈⼯控制系统(D) 数字系统和计算机控制系统4. 关于反馈的说法正确的是( D )。
(A) 反馈实质上就是信号的并联(B) 正反馈就是输⼊信号与反馈信号相加(C) 反馈都是⼈为加⼊的(D) 反馈是输出以不同的⽅式对系统作⽤5. 开环控制系统的控制信号取决于( D )(A) 系统的实际输出(B) 系统的实际输出与理想输出之差(C) 输⼊与输出之差(D) 输⼊6. 机械⼯程控制论的研究对象是( D)(A) 机床主传动系统的控制论问题(B) ⾼精度加⼯机床的控制论问题(C) ⾃动控制机床的控制论问题(D) 机械⼯程领域中的控制论问题7. 对于控制系统,反馈⼀定存在于(C )中(A) 开环系统(B) 线性定常系统(C) 闭环系统(D) 线性时变系统8. 以下关于信息的说法正确的是( B)(A) 不确定性越⼩的事件信息量越⼤(B) 不确定性越⼤的事件信息量越⼤(C) 信号越⼤的事件信息量越⼤(D) 信号越⼩的事件信息量越⼤9. 以下关于系统模型的说法正确的是(B )(A) 每个系统只能有⼀种数学模型(B) 系统动态模型在⼀定条件下可简化为静态模型(C) 动态模型⽐静态模型好(D) 静态模型⽐动态模型好10. 机械⼯程控制论所研究的系统( D)(A) 仅限于物理系统(B) 仅限于机械系统(C) 仅限于抽象系统(D) 包括物理系统和抽象系统11. 学习机械⼯程控制基础的⽬的之⼀是学会以(A )的观点对待机械⼯程问题(A) 动⼒学(B) 静⼒学(C) 经济学(D) ⽣物学12. 机械系统、⽣命系统及社会和经济系统的⼀个共同的本质特性是( B)(A) 都是由元素组成的(B) 通过信息的传递、加⼯处理并利⽤反馈来控制(C) 都是可以控制的(D) 都存在微分环节13. 机械系统之所以表现动态特性,主要原因是(D )(A) 机械系统是由机械部件组成的(B) 存在阻尼元件(C) 存在弹性元件(D) 存在内反馈14. 闭环控制系统的特点是系统中存在(C )(A) 执⾏环节(B) 运算放⼤环节(C) 反馈环节(D) ⽐例环节15. 闭环⾃动控制的⼯作过程是(C )(A) 测量系统输出的过程(B) 检测系统偏差的过程(C) 检测偏差并消除偏差的过程(D) 使系统输出不变的过程16. 系统和输⼊已知,求输出,并对系统动态特性进⾏研究,称为( B)(A) 系统综合(B) 系统分析(C) 系统辨识(D) 系统设计17. 以下关于系统的说法错误的是(B )(A) 系统是由元素和⼦系统组成的(B) 系统的特性仅取决于组成系统的元素(C) 系统具有动态特性(D) 系统内存在信息的传递和转换18. 开环控制系统的特点是(D )(A) 不能实现计算机控制(B) 存在信息的反馈(C) 容易引起不稳定(D) 结构简单,成本低19. 对控制系统的⾸要要求是(C )(A) 系统的经济性(B) 系统的⾃动化程度(C) 系统的稳定性(D) 系统的响应速度20. 在下列系统或过程中,不存在反馈的有(C )(A) 抽⽔马桶(B) 电饭煲(C) 并联的电灯(D) 教学过程21. 以下关于系统数学模型的说法正确的是(D )(A) 只有线性系统才能⽤数学模型表⽰(B) 所有的系统都可⽤精确的数学模型表⽰(C) 建⽴系统数学模型只能⽤分析法(D) 同⼀系统可以⽤不同形式的数学模型进⾏表⽰22. 关于叠加原理说法正确的是( C)(A) 对于作⽤于系统同⼀点的⼏个作⽤才能⽤叠加原理求系统的总输出(B) 叠加原理只适⽤于线性定常系统(C) 叠加原理只适⽤于线性系统(D) 叠加原理只适⽤于所有系统23. 关于线性系统说法正确的是(C )(A) 都可以⽤传递函数表⽰(B) 只能⽤传递函数表⽰(C) 可以⽤不同的模型表⽰(D) 都是稳定的24. 系统的传递函数( A)(A) 与外界⽆关(B) 反映了系统、输⼊、输出三者之间的关系(C) 完全反映了系统的动态特性(D) 与系统的初始状态有关25. 以下⼏个微分⽅程表⽰的系统中,属于线性定常系统的是( C)(A)(B)(C)(D)26. 对于⼀个线性系统,(C )(A) 不能在频域内判别其稳定性(B) 不能在时域内判别其稳定性(C) 若有多个输⼊,则输出是多个输⼊共同作⽤的结果(D) 每个输⼊所引起的输出不可单独计算27. 系统数学模型是指( C)的数学表达式(A) 输⼊信号(B) 输出信号(C) 系统的动态特性(D) 系统的特征⽅程28. 以下传递函数属于振荡环节的是(C )(A)(B)(C)(D)29. 已知闭环系统传递函数⽅框图如下,则系统的传递函数为(C)(A)(B)(C)(D)30. 系统如图所⽰,以下传递函数中,错误的是(C )(A)(B)(C)(D)31. 以下关于线性系统时间响应的说法正确的是( C)(A) 时间响应就是系统输出的稳态值(B) 由单位阶跃响应和单位脉冲响应组成(C) 由强迫响应和⾃由响应组成(D) 与系统初始状态⽆关控制⼯程基础第2次作业⼀、单项选择题(只有⼀个选项正确,共32道⼩题) 1.答案:A(A)(B)(C)(D)2.答案:B(A) 8(B) 2(C) 7(D) 3.53.答案:A(A) 0.25(B) 0.5(C) 1(D) 24. ⼆阶⽋阻尼系统的上升时间为( C)(A) 系统的阶跃响应曲线第⼀次达到稳态值的98%的时间(B) 系统的阶跃响应曲线达到稳态值的时间(C) 系统的阶跃响应曲线第⼀次达到稳态值的时间(D) 系统的阶跃响应曲线达到稳态值的98%的时间5. 以下⼆阶⽋阻尼系统性能指标只与其阻尼⽐有关的是(D)(A) 上升时间(B) 峰值时间(C) 调整时间(D) 最⼤超调量6. 以下关于系统稳态偏差的说法正确的是(C )(A) 稳态值只取决于系统结构和参数(B) 稳态偏差只取决于系统输⼊和⼲扰(C) 稳态偏差与系统结构、参数、输⼊和⼲扰等有关(D) 系统稳态偏差始终为07. 单位反馈系统的开环传递函数为,则在单位斜坡输⼊下的稳态误差为(D )(A) 500(B) 1/500(C) 100(D) 0.018. 以下系统中存在主导极点的是(D )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学 院:机械工程及自动化学院
班 级:2017级车辆工程1班
学 号:
姓 名:
任课老师:
2019年6月
“控制工程基础”课程大作业
“控制工程基础”课程大作业
一.题目:下图所示为打印机中打印轮控制系统的原理图。
系统由打印轮(负载)、直流电动机及用于速度反馈与位置反馈的增量编码器等组成。
1.对于编码器-误差检测器,有
)()()(t t t o i e θθθ−= (1) )()(t K t e e s θ= (2) 式中:−s K 编码器增益。
2.在位置控制方式中,处理器把编码器的输出与给定参考位置信号进行比较,再送出其偏差信号。
对于增益为A K 的功率放大器,有
)()(t e K t e A a = (3)
对于永磁直流电动机,有
⎪⎪⎪⎭⎪⎪⎪⎬⎫=+==−=+)()()()()()()()()()()(t T t B dt t d J t i K t T t K t e t e t e t i R dt t di L M M M a T M M b b b a a a a a
ωωω (4) 式中:−b K 电动机反电动常数;
−T K 电动机转矩常数;
−M ω电动机转速; −M T 电动机输出转矩;
−J 折算到电动机轴上的总转动惯量;
−B 折算到电动机轴上的总粘性阻尼系数。
电动机输出量为:
)()(),()(t t t dt
t d
M o M M θθωθ== (5) 二.问题
1. 请画出以)(t i θ为输入,)(t o θ为输出的系统动态结构图,进而自行选取一组参
数写出系统的数学模型(传递函数,三阶);
解:取式(1)至式(5)的拉氏变换,可画出以θi 为输入、θo 为输出的系统框图,如图1所示。
由此可求出系统闭环传递函数为
Φ(s )=Θo (s )Θi (s )=K s K A K T R a Bs (T a s +1)(Ts +1)+K b K T s +K s K A K T 式中,T a =L a /R a ;T =J/B 。
式(6)表明,打印轮位置控制系统是一个三阶系统。
代入数据得
Φ(s )= 2.40.001s 3+0.027s 2+0.35s +2.4
2. 当0≈a L 时,重新求出系统简化的数学模型(传递函数,二阶);
解:由于L a ≈0,则T a ≈0,式(6)可简化为
Φ(s )=Θo (s )Θi (s )=K s K A K T R a Js 2+(K b K T +R a B)s +K s K A K T 这个传递函数是二阶的。
于是,它可写成标准形式。
图1 打印轮位置控制系统框图
(6) (7)
因此,系统的无阻尼固有频率为
ωn =√K s K A K T R a J
阻尼比为
ζ=K b K T +R a B 2R a Jωn =K b K T +R a B 2√K s K A K T R a J
代入数据得
Φ(s )=
2.40.025s 2+0.35s +2.4
3.而分析系统的动态性能(N M t t t p s p r ,,,,等);
解:在MATLAB 上,该系统的单位阶跃响应计算程序为
>> num=[2.4];
>> den=[0.025 0.35 2.4];
>> step(num,den);
>> grid
该系统的单位阶跃响应曲线如图2所示。
由图2可得系统的上升时间t r =0.222s ,峰值时间t p =0.461s ,调整时间为t s =0.606s ,最大超调量M p =4.04%,振荡次数N =1。
图2 系统的单位阶跃响应曲线
4. 应用matLab 软件对该二阶系统在不同参数模型下进行稳态分析(主要分析稳
态误差);
解:(1)求该系统的闭环零极点并判断系统的稳定性
① MATLAB 计算程序
>> num=[2.4];
>> den=[0.025 0.35 2.4];
>> [p,z]=pzmap(num,den);
>> pzmap(num,den);
>> title ('Pole-Zero MaP');
>> hold on;
>> roots(den)
②计算结果
ans =
-7.0000 + 6.8557i
-7.0000 - 6.8557i
由计算结果可知,该系统的2个闭环极点均具有负实部,故系统稳定。
系统的闭环零极点分布如图3所示。
图3 系统的闭环零极点分布
(2)求该系统的稳态误差
①MATLAB计算程序
>> num=[2.4];
>> den=conv([1 0],[0.025 0.35 2.4]);
>> s1=tf(num,den);
>> sys=feedback(s1,1);
>> t=[0:0.01:0.1]';
>> num1=sys.num{1};
>> den1=[sys.den{1},0,0];
>> sys1=tf(num1,den1);
>> y1=step(sys1,t);
>> num2=1;
>> den2=[1 0 0 0];
>> sys2=tf(num2,den2);
>> y2=impulse(sys2,t);
>> subplot(121),plot(t,[y2,y1]),grid
>> subplot(122),es=y2-y1;plot(t,es),grid
>> ess=es(length(es));
>> ess
②计算结果
ess =
0.0050
该系统的稳态误差为e ss=0.0050,其误差响应曲线如图4所示。
图4 系统的误差响应曲线
5. 应用matLab 软件对该二阶系统在不同参数模型下进行频域分析(主要应用
Bode 图进行分析,分析其稳定裕量);
解:该二阶系统的开环传递函数为
G (
s )= 2.40.025s 2+0.35s
在MATLAB 仿真界面上输入如下程序
>> num=[2.4];
>> den=[0.025 0.35 0];
>> margin(num,den);
>> grid
该系统的博德图如图5所示。
该函数命令直接给出系统相位裕量γ(ωc )=65.9°、幅值裕量无穷大,幅值穿越频率ωc 无穷大,相位穿越频率ωg =6.26rad/s ,如图5所示。
图5 系统的博德图
6.如参数模型不稳定或虽然稳定但性能指标(动态性能指标和稳态性能指标)
不满足要求时,通过加入PID控制使其稳定或满足性能指标要求,从而完成PID校正设计。
解:为改善系统的快速性,采用比例(P)校正装置,其传递函数为
G c(s)=K p
取
G c(s)=4.5 2.4
⁄
则校正后系统的开环传递函数为
G(s)G c(s)=
4.5
0.025s2+0.35s
校正后系统的开环频率特性MATLAB程序为
>> num=[4.5];
>> den=[0.025 0.35 0];
>> margin(num,den);
>> grid
>> den1=[0.025 0.35 4.5];
>> step(num,den1);
>> grid
校正后的系统博德图如图6所示。
由图6可知系统相位裕量γ(ωc)=53.5°,幅值裕量无穷大,幅值穿越频率ωc无穷大,相位穿越频率ωg=10.3rad/s。
图6 校正后的系统博德图
校正后的系统单位阶跃响应曲线如图7所示。
由图7可知系统的上升时间t r=0.125s,峰值时间t p=0.276s,调整时间为t s=0.578s,最大超调量M p=14.6%,振荡次数N=1。
图7 校正后的系统单位阶跃响应曲线
通过对比可知,系统的上升时间t r、峰值时间t p和调整时间t s均比未校正前缩短,而其相位裕量γ(ωc)和相位穿越频率ωg也均在合理范围之内,故满足设计要求。
三.实例
(1)根据打印轮控制系统,试绘出其组成框图,并简要说明其工作原理。
(2)根据(1)方框图求出对应的系统闭环传递函数。
(3)试求出系统的极点并判断系统的稳定性。
(4)试求系统的单位阶跃响应和单位脉冲响应。
(5)求在单位阶跃响应下的稳态误差。
附:已知条件如下所示:
1)电机定子绕阻R=0.5Ω;
2)自感系数L=0.02H;
3)转动惯量J=0.05kg.m^2;
4)电势系数Kb=0.5V/rad;
5)阻尼系数B=0.1Nms/rad;
6)电动机转矩常数Kt=0.6Nm/A; 7)编码器增益Ks=2;
8)功率放大器增益Ka=2;
9)开环增益K=Kt*Ks*Ka。