行星轮系减速器设计说明书
行星齿轮减速器-课程设计计算说明书
目录设计任务书: (2)设计内容: (3)一、评述传动方案 (3)二、电动机的选择及动力参数计算 (4)三、传动零件的校核计算 (6)一)外啮合齿轮传动 (6)二)内啮合齿轮传动 (9)四、轴的设计 (11)一)减速器输入轴Ⅰ (11)二)行星轮轴Ⅱ (17)三)内齿轮轴Ⅲ (20)五、键连接的选择和计算 (23)六、滚动轴承的选择和计算 (25)七、联轴器的选择 (28)八、齿侧间隙 (28)九、轴Ⅱ加工工艺图 (29)十、参考资料 (30)设计任务书:设计内容:一、 评述传动方案牵引速度为 1.5/v m s =,滚筒直径400D mm =,可求出滚筒转速(601000)/w n v =⨯⨯()(60100 1.5)/(400)71.62/min D r ππ=⨯⨯⨯=,由于工作情况为:室外,环境有灰尘,最高温度40℃,两班制,间歇双向运转,反向空转,断续周期工作制(S3),负荷持续率FC=56%,载荷有冲击,故应选YZR 系列电动机为原动机,它的转速约为750~1000r/min ,传动装置速比应为/(750~1000)/71.6210.47~13.96m w i n n === 可选如下图1-1、1-2两种方案:图1-1方案a 采用NW 分流式行星齿轮传动,卷扬机工作时制动器10制动,此时电动机1通过联轴器2驱动行星齿轮减速器,行星架上的滚筒5使钢丝绳7运动,从而牵引重物移动。
不需重物移动时,制动器6制动,制动器10松开,这时行星传动变成定轴传动,电动机和二级同轴式减速器空转,不用频繁地起动和制动电动机。
滚筒用滑动轴承支撑在机架上。
传动比:5~25i =,可满足传动要求。
优点:外形尺寸小(减速器内置),电动机不用频繁启动适合狭窄工况下工作。
缺点:结构复杂,加工安装精度高,成本大,不易维修。
图1-2方案b 采用一级带传动和一级闭式齿轮传动,电动机带动带传动,齿轮传动,从而带动滚筒运动。
行星齿轮减速机设计说明书
摘要摆线针轮行星减速器作为重要的机械传动部件具有体积小、重量轻、传动效率高的特点。
本设计在全面考虑多齿啮合、运转平稳、轮齿均载等运动学和动力学的要求下,要实现高承载能力、高传递效率、高可靠性和优良动力学性能等指标,而且要便于制造、装配和检修,设计了具有该合理结构的摆线针轮行星减速器。
本设计建立了合理的动力分析数学模型,对摆线针轮传动中的摆线轮、转臂轴承、柱销及轴进行准确的受力分析,并用MATLAB语言编制计算机程序对其求解。
计算并校核主要件的强度及转臂轴承、各支承轴承的寿命,从分析结果可以看到,各轴承性能指标均符合要求。
利用Inventor软件对摆线针轮减速器各零件建立几何三维模型、摆线针轮减速器虚拟装配及生成工程图。
用本文的方法设计摆线针轮减速器,具有设计快捷、方便等特点。
研究结果对提高设计的速度、质量具有重要意义。
关键词:摆线传动摆线轮 InventorAbstractThe cycloid—gear reducer is one of the most important transmission components of the pumping unit by its smaller volume,lighter weight and effective transmission. In order to realize four targets which include high transmission efficiency, high reliability and the excellent dynamics performance and guarantee credible lubricate ability, receive high efficiency of transmission, and make it easy for manufacture, assembly and inspection, we thought over all the requests in the round and design the rational structure cycloid—gear reducer.In this design,we built the exact force analysis mathematical model of the cycloid—gear reducer, analyzed the forces born by the cycloid-gear, the bearings and the shaft, and produce the Matlab language software analyze of the forces analysis. We analyzed the forces of parts in the cycloid—gear reducer and calculated the intensity and the life of parts. From analyzed the results, we found the parts are our requests.When we establish the three—dimensional structure of the Planet—cycloid Reducer model with the software Inventor,Carry on visual design and virtual assemble and drawing paper.The result of study have the guide meaning to accelerate design speed and quantities of the Planet—cycloid Reducer.Keywords:Planet—cycloid Reducer; Cycloid ; Inventor第一章绪论在科技飞速发展的今天,产品设计已经进入了一种全新的三维虚拟现实的设计环境中,以往的那种以二维平面设计模式为代表的设计方式已经逐渐退出“历史舞台”,取而代之的是各种先进数字化的三维设计技术。
机械课程设计说明书,行星齿轮减速器传动装置设计(单级)
基于行星轮减速器的传动装置设计学院:XXXXXXXXXXXXXXX专业:机械设计制造及其自动化班级:机械xxx学号:XXXXX姓名:XXXXX指导老师:XXXXXXX目录一、设计选题错误!未定义书签。
应用背景错误!未定义书签。
题设条件错误!未定义书签。
二、传动装置的方案设计错误!未定义书签。
选取行星齿轮传动机构错误!未定义书签。
总体传动机构的设计错误!未定义书签。
三、传动装置的总体设计错误!未定义书签。
选择电动机错误!未定义书签。
传动系统的传动比错误!未定义书签。
传动系统各轴转速/功率/转矩错误!未定义书签。
四、减速器传动零件的设计错误!未定义书签。
齿轮的设计计算与校核错误!未定义书签。
确定各齿轮的齿数错误!未定义书签。
初算中心距和模数错误!未定义书签。
齿轮几何尺寸计算错误!未定义书签。
齿轮强度校核(受力分析/接触弯曲强度校核)错误!未定义书签。
轴/轴承/联轴器/键的设计计算与校核错误!未定义书签。
行星轴设计(轴/轴承)错误!未定义书签。
行星架结构设计错误!未定义书签。
输入轴的设计(轴/轴承/联轴器/键选用及校核)错误!未定义书签。
输出轴的设计(轴/轴承/联轴器/键选用及校核)错误!未定义书签。
箱体的设计及润滑密封的选择错误!未定义书签。
箱体的设计错误!未定义书签。
润滑密封的选择错误!未定义书签。
五、课程设计总结错误!未定义书签。
六、主要参考文献错误!未定义书签。
一、设计选题应用背景近些年,随着国际工业水平的不断提高以及国家对工业技术的支持助力,越来越多的工业机器取代了人力,各行各业从中获利;同时由于市场工艺方面的需求,涌现了一批体积小,效率高的新型机械产品。
它们一般都是以小巧紧凑,平稳高效,方便快捷而深获各行各业的青睐。
这些机器其中就有一些是以行星轮作为其减速器的主要结构。
现在市场上常用的减速器大多是普通齿轮减速器,一般都比较笨重粗糙,不太符合一些新兴行业的紧凑高效快捷的理念。
而行星齿轮传动的主要特点就是体积、质量小,结构紧凑,承载能力、传动效率高,传动比较大且运动平稳、抗冲击和振动的能力较强。
行星齿轮变速器设计说明书

DSZP2HA 行星齿轮变速器设计说明书一、用途:捞渣输送机主传动装置是用于2X330MW电力机组除渣设备主传动设备,该设备集机电液为一体,传动设备的主要功能是通过传动装置带动链条,链条带动刮板,当接渣斗装满后,传动装置启动,托出刮板,带出煤渣,并运到高处,把煤渣倾倒出去。
二、设计输入参数:1.工作扭矩:14000Nm;2.最大扭矩:55000Nm;3.转速范围:0.2-2.5rpm;4.减速机速比:37.92:1;三、方案设计一)传动型式选择:按最大扭矩55000Nm,总传动比37.92,选用两级NGW行星齿轮减速机。
两级行星轮个数均选n p=3,高速级采用行星架浮动而太阳轮和内齿轮固定的结构;低速级采用太阳轮浮动的结构。
二)材料、性能选者、热处理及齿形要求1.材料:a 太阳轮和行星轮的材料为20CrNi2MoA,渗碳淬火处理,表面硬度57+4HRC,齿面接触疲劳极限:σHlim=1450N/mm2 ,齿根弯曲疲劳极限:太阳轮σFlim=400N/mm2 ,行星轮σFlim=280N/mm2 ,b 内齿轮的材料为42CrMo,调质处理,硬度为HB262~293,齿面接触疲劳极限σHlim=750N/mm2 ,齿根弯曲疲劳极限σFlim=255N/mm2 ,2.齿形齿形为渐开线直齿,外啮合最终加工为磨齿,6级精度;内啮合最终加工为插齿,7级精度。
为提高齿轮承载能力,两极均采用变位齿轮传动。
三).传动比的分配按高速级(I )和低速级(II )齿面接触等强度的原则进行传动比的分配。
取系数λ=1.2(低速级内齿轮分度圆直径2d 与高速级内齿轮分度圆直径2d 之比,一般λ=1~1.3),齿宽系数φaI =0.4, φaII =0.7,σHlimI=σHlimII ,其余见下表 代 号名 称 说 明 取 值 K A使用系数 按中等冲击 1.5 K HPI1.1 K HPII行星轮间载荷分配系数 按《齿轮手册》表7.3-7 1.05 K H ∑IK H ∑II 综合系数 按《齿轮手册》表7.3-4 1.8由《齿轮手册》可知,q 值为834.113508.105.14.0313508.11.17.03)()(22lim 2lim 2==•∑••••∑•••=x x x x x x x x K K n K K n q I H II H HPII aI d PI II H I HHPI aII d PII σφσφ 17.32.1834.133==X q λ由此查《齿轮手册》图7.2-9,得P I =5.75 ,则75.675.51111=+=+=P i58.575.6/68.37/1===i i i II四)、配齿计算a 高速级太阳轮齿数Za2075.6453===X i C n Z I P a 取C=45(整数) 内齿圈齿数Zb115)175.6(20)1(=−=−•=X i Za Zb I行星轮齿数Zc5.47)20115(5.0)(5.0'=−=−=X Z Z X Z a b C取Zc=47整数,满足装配条件45311520=+=+=p b a n z z M b 同理可求出低速级齿数913520===b c a z z z ,,整数,满足装配条件3739120=+=+=p b a n z z M c 按齿面接触强度,计算太阳轮分度圆直径高速级太阳轮传递扭矩为:T=55000/37.68=1560N 。
少齿差行星减速器设计说明书

少齿差行星减速器设计说明书1 导言1.1 设计目的减速器是指原动机与工作机之间独立的闭式传动装置,为各行业成套装备及生产线配套的大功率和中小功率变速箱。
行星齿轮减速器是齿轮减速器中应用较多的一种,它具有许多优点,在各种车辆、机械设备和其它传动系中得到广泛使用。
随着近代工业技术的高速发展,对行星齿轮传动的承载能力、可靠性、效率、圆周速度、体积及质量等技术和经济指标提出了愈来愈高的要求。
与此同时,优化其结构设计也被提到十分重要的地位上。
行星齿轮传动较普通齿轮传动具有许多独特的优点,它不仅用于民用机械上,而且广泛用于军事机械传动装置,其主要特点如下:结构紧凑,承载能力大;只要适当选择机构的形式,便可以用较少的齿轮获得很大的传动比,甚至其传动比能达到好几千倍,虽然传动比很大但是仍然结构紧凑、重量轻;传动效率较高,其值可达0.8,0.9以上;由于行星轮均匀分布于中心轮的四周,因而惯性力平衡,机构运[1]转平稳,抗冲击和抗震动能力强。
1.2 减速器的生产现状当今世界各国减速器及齿轮技术发展总趋势是向六高、二低、二化方面发展。
六高就是指高承载能力、高齿面硬度、高精度、高速度、高可靠性和高传动效率;二低,是指低噪声和低成本;二化是标准化和多样化。
国内的减速箱将逐渐淘汰软齿面,向硬齿面(50,60HRC)、高精度(4级)、高可靠度软启动、运行监控、运行状态记录、低噪声、高的功率与体积比和高的功率与重量比的方向发展。
中小功率变速箱为适应机电一体化成套装备自动控制、自动1调速、多种控制与通讯功能的接口需要,产品的结构与外型在相应改变。
矢量变频代替直流伺服驱动,已成为近年中小功率变速箱产品(如摆轮针轮传动、谐波齿轮传动等)追求的目标。
近十几年来,计算机技术、信息技术、自动化技术机械制造中的广泛应用,改变了制造业的传统观念和产品组织方式。
一些先进的齿轮生产企业已经采用精益产、敏捷制造、智能制造等先进技术,形成了高精度、高效率的智能化齿轮生产线和计[2]算机网络化管理。
绞车行星减速装置说明书..
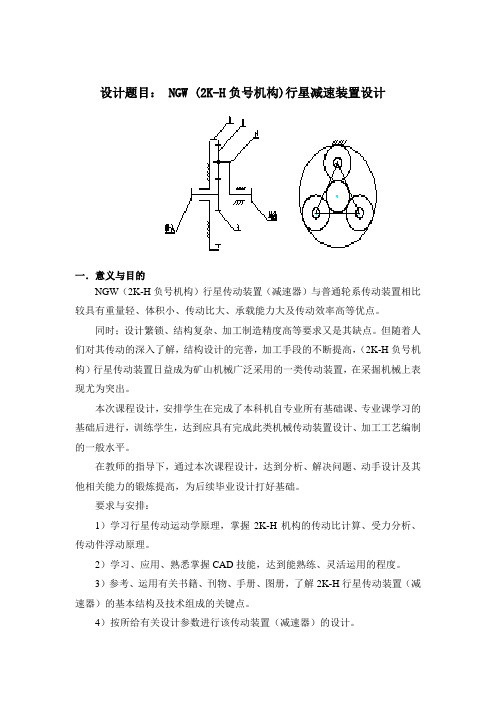
设计题目: NGW (2K-H负号机构)行星减速装置设计一.意义与目的NGW(2K-H负号机构)行星传动装置(减速器)与普通轮系传动装置相比较具有重量轻、体积小、传动比大、承载能力大及传动效率高等优点。
同时;设计繁锁、结构复杂、加工制造精度高等要求又是其缺点。
但随着人们对其传动的深入了解,结构设计的完善,加工手段的不断提高,(2K-H负号机构)行星传动装置日益成为矿山机械广泛采用的一类传动装置,在采掘机械上表现尤为突出。
本次课程设计,安排学生在完成了本科机自专业所有基础课、专业课学习的基础后进行,训练学生,达到应具有完成此类机械传动装置设计、加工工艺编制的一般水平。
在教师的指导下,通过本次课程设计,达到分析、解决问题、动手设计及其他相关能力的锻炼提高,为后续毕业设计打好基础。
要求与安排:1)学习行星传动运动学原理,掌握2K-H机构的传动比计算、受力分析、传动件浮动原理。
2)学习、应用、熟悉掌握CAD技能,达到能熟练、灵活运用的程度。
3)参考、运用有关书籍、刊物、手册、图册,了解2K-H行星传动装置(减速器)的基本结构及技术组成的关键点。
4)按所给有关设计参数进行该传动装置(减速器)的设计。
a .齿数的选择:传动比及装配条件、同心条件、邻界条件的满足。
b .了解各构件的作用力及力矩的分析,进行“浮动”机构的选择。
c .参考设计手册根据齿轮、轴、轴承的设计要点进行有关设计计算。
d .按有关制图标准,绘制完成教师指定的行星传动装置(减速器)总图、部件图、零件图,书写、整理完成设计计算说明书。
e .对于所设计的典型零件结合所学有关加工工艺知识编写一个零件加工工艺f .行星传动装置(减速器)总图选择合适比例采用A1号图面绘制,主要技术参数(特征)、技术要求应表达清楚,在指导教师讲授、指导下标注、完成总图所需的尺寸、明细及图纸的编号等各类要求。
按零件图要求完成零件图纸的绘制,提出技术要求,上述图纸总量不应少于折合:A0图纸一张。
数控机床行星轮系减速器设计
数控机床行星轮系减速器设计数控机床的行星轮系减速器是一种广泛应用的传动装置,它通过行星轮组件的布置实现不同级别的减速比。
下面是一个简单的数控机床行星轮系减速器的设计概述:1. 确定传动比首先,需要确定减速器的传动比,即输入轴(通常是电机轴)和输出轴(连接机床的轴)之间的速度比。
这个比例决定了减速器的性能。
2. 选择行星轮参数行星轮系由太阳轮、行星轮、载星架和行星轴构成。
行星轮的大小和齿数、载星架的形状和行星轴的排列方式等参数需要根据具体的应用需求和传动比来选择。
3. 计算齿轮参数根据所选的行星轮参数,需要计算齿轮的模数、齿数、齿宽等参数。
这些参数的计算涉及到传动比、功率传递、齿轮强度等方面的考虑。
4. 结构设计设计行星轮系的结构,包括行星轮的排列方式、轴承的选用、齿轮的安装等。
考虑整体结构的紧凑性、刚性、耐久性等因素。
5. 材料选择选择合适的材料来制造行星轮系的各个部件,以确保其强度、耐磨性和寿命。
6. 动力学分析进行动力学分析,包括行星轮系统的动力学行为、振动等方面的分析,以确保设计的稳定性和可靠性。
7. 优化设计在满足基本要求的前提下,可以进行优化设计,以提高效率、降低噪音、减小体积等方面的性能。
8. 制造和测试根据设计图纸制造行星轮系,然后进行实际测试。
测试包括负载测试、寿命测试、温升测试等,以验证设计的可行性和性能。
9. 调整和改进根据测试结果,对设计进行调整和改进,确保减速器在实际应用中能够稳定可靠地工作。
这只是一个概述,实际设计还需要具体应用和性能要求来进行更详细的设计。
在设计数控机床行星轮系减速器时,通常需要借助计算机辅助设计(CAD)和计算机辅助工程(CAE)等工具来进行模拟和分析。
行星齿轮减速机说明书
行星齿轮减速机说明书尊敬的用户:感谢您购买我们的行星齿轮减速机。
为了确保您能正确、安全地使用该产品,我们为您提供以下说明书,请您仔细阅读并严格遵守相关安全操作规程。
1. 产品概述:行星齿轮减速机是一种广泛应用于工业机械传动系统中的重要设备,其主要功能是通过减速来提供更大的输出转矩,并且能够改变输入轴的转速。
2. 工作原理:行星齿轮减速机采用行星齿轮传动原理,它由太阳轮、行星轮和内齿轮组成。
太阳轮连接输入轴,行星轮与太阳轮啮合,并且通过行星架与内齿轮相连。
当太阳轮旋转时,行星轮会以不同的速度旋转,并驱动内齿轮输出转矩。
3. 使用注意事项:- 在使用行星齿轮减速机之前,请确保您已经仔细阅读并理解本说明书中的所有内容。
- 在安装和操作之前,请确认行星齿轮减速机是否完好无损。
- 安装时,请确保减速机与其他设备正确连接,并且在安装过程中使用合适的工具和紧固件。
- 在操作过程中,不要超负荷使用行星齿轮减速机,以避免设备损坏或者人身伤害。
- 用户禁止改变或修改减速机内部结构,除非经过我们授权的专业人员。
- 如果在使用过程中出现异常响声、过热或其他故障,请立即停止使用,并联系我们的售后服务团队进行检修。
4. 维护和保养:- 定期检查行星齿轮减速机是否有异常磨损或损坏。
- 定期给减速机润滑油加注或更换,更换周期请根据实际使用情况来定。
- 在保养过程中,请将减速机清洁干净,并确保其周围环境干燥,防止进入灰尘或其他杂质。
请务必按照以上说明书进行操作和维护,以确保行星齿轮减速机的正常运行和使用寿命。
如有其他问题或需要进一步的技术支持,请随时联系我们的售后服务团队。
祝您使用愉快!此致XX制造公司。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章概述行星轮系减速器较普通齿轮减速器具有体积小、重量轻、效率高及传递功率范围大等优点,逐渐获得广泛应用。
同时它的缺点是:材料优质、结构复杂、制造精度要求较高、安装较困难些、设计计算也较一般减速器复杂。
但随着人们对行星传动技术进一步的深入地了解和掌握以及对国外行星传动技术的引进和消化吸收,从而使其传动结构和均载方式都不断完善,同时生产工艺水平也不断提高,完全可以制造出较好的行星齿轮传动减速器。
根据负载情况进行一般的齿轮强度、几何尺寸的设计计算,然后要进行传动比条件、同心条件、装配条件、相邻条件的设计计算,由于采用的是多个行星轮传动,还必须进行均载机构及浮动量的设计计算。
行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NN型、WW型、WGW型、NGWN型和N型等。
我所设计的行星齿轮是2K—H行星传动NGW型。
第二章原始数据及系统组成框图(一)有关原始数据课题: 一种自动洗衣机行星轮系减速器的设计原始数据及工作条件:使用地点:自动洗衣机减速离合器内部减速装置;传动比:p i=5.2输入转速:n=2600r/min输入功率:P=150wn=3行星轮个数:wz=63内齿圈齿数b(二)系统组成框图洗涤:A制动,B放开,运动经电机、带传动、中心齿轮、行星轮、行星架、波轮脱水:A放开,B制动,运动经电机、带传动、内齿圈(脱水桶)、中心齿轮、行星架、波轮与脱水桶等速旋转。
第三章减速器简介减速器是一种动力传达机构,利用齿轮的速度转换器,将马达的回转数减速到所要的回转数,并得到较大转矩的机构。
减速器降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出减速器额定扭矩。
降速同时降低了负载的惯量,惯量的减少为减速比的平方。
一般的减速器有斜齿轮减速器(包括平行轴斜齿轮减速器、蜗轮减速器、锥齿轮减速器等等)、行星齿轮减速器、摆线针轮减速器、蜗轮蜗杆减速器、行星摩擦式机械无级变速机等等。
按传动级数主要分为:单级、二级、多级;按传动件类型又可分为:齿轮、蜗杆、齿轮-蜗杆、蜗杆-齿轮等。
1)蜗轮蜗杆减速器的主要特点是具有反向自锁功能,可以有较大的减速比,输入轴和输出轴不在同一轴线上,也不在同一平面上。
但是一般体积较大,传动效率不高,精度不高。
2)谐波减速器的谐波传动是利用柔性元件可控的弹性变形来传递运动和动力的,体积不大、精度很高,但缺点是柔轮寿命有限、不耐冲击,刚性与金属件相比较差。
输入转速不能太高。
3)行星减速器其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大。
第四章传动系统的方案设计传动方案的分析与拟定1)对传动方案的要求合理的传动方案,首先应满足工作机的功能要求,还要满足工作可靠、传动精度高、体积小、结构简单、尺寸紧凑、重量轻、成本低、工艺性好、使用和维护方便等要求。
2)拟定传动方案任何一个方案,要满足上述所有要求是十分困难的,要统筹兼顾,满足最主要的和最基本的要求。
例如图1-1所示为作者拟定的传动方案,适于在恶劣环境下长期连续工作。
图4-1 周转轮系a-中心轮;g-行星轮;b-内齿圈;H-行星架第五章 行星齿轮传动设计(一)行星齿轮传动的传动比和效率计算行星齿轮传动比符号及角标含义为: 123i 1—固定件、2—主动件、3—从动件1、齿轮b 固定时(图1—1),2K —H (NGW )型传动的传动比baH i 为b aH i =1-Hab i =1+b z /a z可得 Hab i =1-b aH i =1-p i =1-5.2=-4.2 a z =b z /b aH i -1=63*5/21=15输出转速:H n =a n /p i =n/p i =2600/5.2=500r/min 2、行星齿轮传动的效率计算:η=1-|a n -H n /(H ab i -1)* H n |*H ψH ψ=*H H Ha b B ψψψ+H a ψ为a —g 啮合的损失系数,H b ψ为b —g 啮合的损失系数,HB ψ为轴承的损失系数,H ψ为总的损失系数,一般取H ψ=0.025按a n =2600 r/min 、H n =500r/min 、H ab i =-21/5可得η=1-|a n -H n /(H ab i -1)* H n |*H ψ=1-|2600-500/(-4.2-1)*500|*0.025=97.98%(二) 行星齿轮传动的配齿计算1、传动比的要求——传动比条件即 baH i =1+b z /a z可得 1+b z /a z =63/5=21/5=4.2 =b aH i所以中心轮a 和内齿轮b 的齿数满足给定传动比的要求。
2、保证中心轮、内齿轮和行星架轴线重合——同轴条件为保证行星轮g z 与两个中心轮a z 、b z 同时正确啮合,要求外啮合齿轮a —g 的中心距等于内啮合齿轮b —g 的中心距,即w (a )a g - =()w b g a - 称为同轴条件。
对于非变位或高度变位传动,有m/2(a z +g z )=m/2(b z -g z )得 g z =b z -a z /2=63-15/2=243、保证多个行星轮均布装入两个中心轮的齿间——装配条件 想邻两个行星轮所夹的中心角H ϕ=2π/w n中心轮a 相应转过1ϕ角,1ϕ角必须等于中心轮a 转过γ个(整数)齿所对的中心角, 即1ϕ=γ*2π/a z式中2π/a z 为中心轮a 转过一个齿(周节)所对的中心角。
p i =n/H n =1ϕ/H ϕ=1+b z /a z 将1ϕ和H ϕ代入上式,有2π*γ/a z /2π/w n =1+b z /a z 经整理后γ=a z +b z =(15+63)/2=24满足两中心轮的齿数和应为行星轮数目的整数倍的装配条件。
4、保证相邻两行星轮的齿顶不相碰——邻接条件在行星传动中,为保证两相邻行星轮的齿顶不致相碰,相邻两行星轮的中心距应大于两轮齿顶圆半径之和,如图1—2所示图5-1 行星齿轮可得 l=2w a *sin(180/)o w n >()a g dl=2*2/m*(a z +g z )*sin 60o /2m ()a g d =d+2a h =17m满足邻接条件。
(三)行星齿轮传动的几何尺寸和啮合参数计算按齿根弯曲强度初算齿轮模数m 齿轮模数m 的初算公式为m=K 式中 m K —算数系数,对于直齿轮传动m K =12.1; 1T —啮合齿轮副中小齿轮的名义转矩,N*m ;1T =a T /w n =95491P /w n n=9549×0.15/3×1600=0.2984N*mA K —使用系数,由《参考文献二》表6—7查得A K =1; F K ∑—综合系数,由《参考文献二》表6—5查得F K ∑=2;FP K —计算弯曲强度的行星轮间载荷分布不均匀系数,由《参考文献二》公式6—5得FP K =1.85;1Fa Y —小齿轮齿形系数, 图6—22可得1Fa Y =3.15;,1z —齿轮副中小齿轮齿数,1z =a z =15;lim F σ—试验齿轮弯曲疲劳极限,2*N mm 按由《参考文献二》图6—26~6—30选取lim F σ=1202*N mm所以m=K =12.1 =0.658 取m=0.9 1)分度圆直径d()a d =m*a z =0.9×15=13.5mm()g d =m*()g z =0.9×24=21.6mm ()b d =m*()b z =0.9×63=56.7mm 2) 齿顶圆直径a d齿顶高a h :外啮合1a h =*a h *m=m=0.9内啮合2a h =(*a h -△*h )*m=(1-7.55/2z )*m=0.792()a a d =()a d +2a h =13.5+1.8=15.3mm()a g d =()g d +2a h =21.6+1.8=23.4mm ()a b d =()b d -2a h =56.7-1.584=55.116mm3) 齿根圆直径f d齿根高f h =(*a h +*c )*m=1.25m=1.125()f a d =()a d -2f h =13.5-2.25=11.25mm()f g d =()g d -2f h =21.6-2.25=19.35mm ()f b d =()b d +2f h =56.7+2.25=58.95mm4)齿宽b《参考三》表8—19选取d ϕ=1()a b =d ϕ*()a d =1×13.5=13.5mm ()a b =d ϕ*+5=13.5+5=18.5mm ()b b =13.5+(5-10)=13.5-5=8.5mm5) 中心距a对于不变位或高变位的啮合传动,因其节圆与分度圆相重合,则啮合齿轮副的中心距为:1、a —g 为外啮合齿轮副ag a =m/2(a z +g z )=0.9/2×(15+24)=17.55mm2、b —g 为内啮合齿轮副bg a =m/2(a z +b z )=0.9/2×(63-24)=17.55mm(四)行星齿轮传动强度计算及校核1、行星齿轮弯曲强度计算及校核 (1)选择齿轮材料及精度等级中心轮a 选选用45钢正火,硬度为162~217HBS ,选8级精度,要求齿面粗糙度a R ≤1.6 行星轮g 、内齿圈b 选用聚甲醛(一般机械结构零件,硬度大,强度、钢性、韧性等性能突出,吸水性小,尺寸稳定,可用作齿轮、凸轮、轴承材料)选8级精度,要求齿面粗糙度a R ≤3.2。
(2)转矩1T1T =a T /w n =95491P /w n n=9549×0.15/3×1600=0.2984N*m=298.4N*mm ;(3)按齿根弯曲疲劳强度校核由《参考文献三》式8—24得出F σ 如F σ≤【F σ】则校核合格。
(4)齿形系数F Y由《参考文献三》表8—12得Fa Y =3.15,Fg Y =2.7,Fb Y =2.29; (5)应力修正系数s Y由《参考文献三》表8—13得sa Y =1.49,sg Y =1.58,sb Y =1.74; (6)许用弯曲应力[]F σ由《参考文献三》图8—24得lim1F σ=180MPa ,lim 2F σ=160 MPa ; 由表8—9得F s =1.3 由图8—25得1N Y =2N Y =1; 由《参考文献三》式8—14可得[]1F σ=1N Y *lim1F σ/F s =180/1.3=138 MPa []2F σ=2N Y *lim 2F σ/F s =160/1.3=123.077 MPa1F σ=2K 1T /b 2m a z *Fa Y sa Y =(2×1.1×298.4/13.5×20.9×15)×3.15×1.49=18.78 Mpa<[]1F σ=138 MPa2F σ=1F σ*Fg Y sg Y /Fa Y sa Y =18.78×2.7×1.587/3.15×1.74=14.62<[]2F σ=123.077 MPa 齿根弯曲疲劳强度校核合格。