电液比例阀用控制器的设计
毕业论文之电液比例控制系统PLC程序设计【范本模板】

黄河科技学院毕业设计(论文)第I页摘要随着电子技术、计算机技术等的快速发展以及向工程机械领域的不断渗透,现代工程机械正处于机电液一体化的发展时代.作为1种新的液压传动控制技术,电液比例控制将液压系统某些功能集成到电液比例控制器内,简化了液压系统的构成,提高了液压系统动作的稳定性和可靠性。
电液比例控制的理论研究和技术的发展已成为工程机械领域发展的一大趋势,是液压工业和控制工程1个新的技术热点和增长点.在工科学院的许多试验设备中,经常需要对各种力学参量、物理学参量及运动过程进行控制。
这些设备中的许多动力源都是液压工作站,控制方法多通过购买市场的控制模块,实现控制过程的参数设置,从而完成控制过程。
这样就导致试验过程中学生对控制系统甚少了解,且科研任务的设计方案易受控制设备的限制而不能灵活变更等许多问题。
因此,在实验室的条件下建立1个灵活、开放式的电液比例控制系统,具有重要的现实意义.搭建了电液比例控制系统,选用西门子S7300PLC实现其控制,对PLC通过软件编制了相关算法和控制程序,在实验台上完成了该位置控制系统的实验研究,对无干扰和有干扰工作条件下控制特性进行了分析比较,并对两种控制算法在无干扰和有干扰的情况下的仿真和实验结果进行了对比分析.实验结果与仿真结果基本一致,但与仿真结果存在差异,主要表现在实际运行过程中有超调,系统对干扰不敏感,这主要与系统的机械惯性和液压系统的刚度较大有关;最后,对PLC与上位计算机的通讯做了一些研究,采用了西门子PLC中的自由口通讯协议,用VB6.0软件设计了通讯界面,实现了PLC与上位计算机之间的通讯,使得实验结果更加直观。
关键词:电液比例控制,PID控制,PLC,通讯ABSTRACTWith the development of the hydraulic control development of the hydraulic control technology,electro-hydraulic proportional control technology had been applied for many fields more and more.The article analyzed the principle and characters of the electro—hydraulic proportional control system.technology,electro —hydraulic proportional control technology had been applied for many fields more and more.The article analyzed the principle and characters of the electro-hydraulic proportional control system.It improved on the control system to the original proportional hydraulic system controlled by signal unite and replaces.Now the system controlled by the programmable logical controller(PLC),and the important study target is proportional hydraulic position contro1.The proportional hydraulic position close—loop control system has been designed,and the project schema,the experience system composition had been given 。
电液比例阀控活塞式液压摆动马达位置控制系统设计 (2)
电液比例阀控活塞式液压摆动马达位置控制系统设计姓名:李保琳学号:101201210班级:机械1002班专业:机械设计与制造及其自动化学院:机械工程学院目录第一章、设计任务和要求 (2)1.1活塞式液压摆动马达的组成及工作原理 (2)1.2设计并仿真分析电液比例阀控活塞式液压摆动马达位置控制系统 (3)第二章、元器件选用 (3)2.1液压油源 (3)2.2电液比例方向阀 (3)2.3比例放大器 (4)第三章、电液比例阀控活塞式液压摆动马达位置控制系统数学模型 (5)3.1系统数学模型的建立 (5)3.2负载的等效处理 (9)3.3系统传递函数参数确定 (10)3.4系统特性分析 (14)3.5系统响应模拟仿真 (17)第四章、电液比例阀控马达速度控制系统PID控制 (19)4.1PID控制器基本原理 (19)4.2液压系统PID校正步骤 (21)4.2校正后系统特性分析 (24)4.3系统响应模拟仿真 (25)第五章、调整后系统的稳态误差分析 (27)5.1指令输入引起的稳态误差 (27)5.2负载干扰力矩引起的稳态误差 (28)第六章、结论与展望 (29)6.1结论 (29)6.2问题与展望 (29)参考文献 (30)第一章、设计任务和要求1.1活塞式液压摆动马达的组成及工作原理活塞式液压摆动马达是将直线运动转换为旋转摆动的液压—机械复合传动机构,其结构原理如图所示。
它由滚珠螺旋副、滚珠花键副、滚珠卸荷副、螺旋旋转输出套、导向套、传动轴、以及液压油缸组件等组成。
摆动马达的工作原理为:液压油进入油缸驱动滚珠螺旋丝杆轴往复直线运动,滚珠螺旋丝杆轴驱动螺旋旋转输出套做往复摆动运动,滚珠花键导轨副防止螺旋丝杆轴转动。
液压摆动马达有以下结构特点:1)采用滚珠螺旋副将活塞及传动轴的直线运动转换为螺旋套的旋转摆动;2)采用滚珠花键副为传动轴导向,平衡负载力矩,以防传动轴转动;3)采用滚珠卸荷副使直旋驱动关节轴向力封闭卸荷,保证滚珠旋摆新型液压摆动马达有良好的受力特性;4)采用多头滚道、大螺旋升角的螺旋机构,增大新型液压摆动马达的承载能力;5)回珠方式采用同圆柱面回珠结构,减小新型液压摆动马达的径向尺寸,以适应飞机的机翼内特殊空间要求。
基于PWM控制的电液比例阀控制系统的设计
[ 6 ] 徐耀松 ,付 华 ,王丹丹. 网络化虚拟仪器技术在煤矿 监测系统中的应用[J ] . 工矿自动化 ,2008 (1) :38240.
[ 7 ] 谢军贤 , 纪传滨 , 付金泉. 基于虚拟仪器技术 的 电 源 自动测试系统[J ] . 航空计算技术 ,2007 (11) :1002101.
0 引言
电液比例阀控制系统广泛应用于机械加工 、冶 金等行业 ,传统的控制方式多数采用 PID 控制技 术 ,虽然该方式具有简单 、可靠 、参数整定方便等优
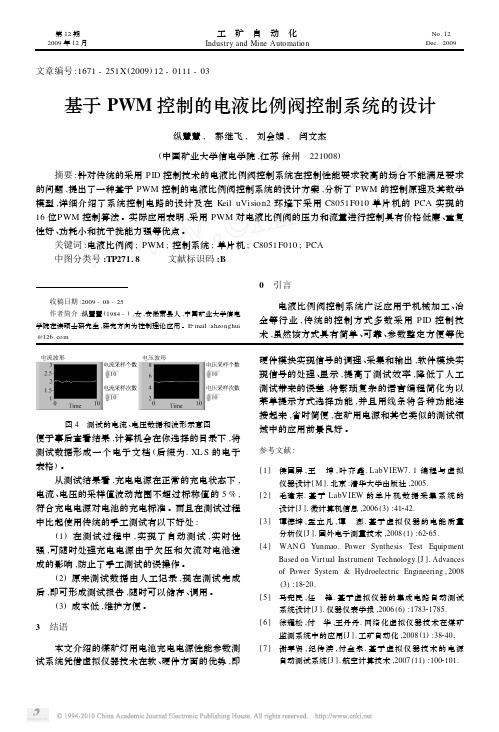
硬件模块实现信号的调理 、采集和输出 ,软件模块实 现信号的处理 、显示 ,提高了测试效率 ,降低了人工 测试带来的误差 ,将繁琐复杂的语言编程简化为以 菜单提示方式选择功能 ,并且用线条将各种功能连 接起来 ,省时简便 ,在矿用电源和其它类似的测试领 域中的应用前景良好 。
参考文献 :
[ 1 ] 侯国屏 ,王 坤 , 叶 齐 鑫. LabV IEW7. 1 编 程 与 虚 拟 仪器设计[ M ] . 北京 :清华大学出版社 ,2005.
[ 2 ] 毛建东. 基 于 LabV IEW 的 单 片 机 数 据 采 集 系 统 的 设计[J ] . 微计算机信息 ,2006 (3) :41242.
u ( t) = m ( e( t) )
=
M sgn[ ( e( t) ) ] , t ∈[ k T , k T + Tk ] T , t ∈ ( k T + Tk , k T + T)
(1)
b | e( k T ) | , | e( k T ) | ≤ T/ b
电液比例阀的设计与实验研究

电液比例阀的设计与实验研究
一、引言
随着液压系统技术的发展,电液比例阀的应用越来越广泛,它在高精
度液压系统中起到重要的作用。
电液比例阀是一种能够实现电控制的液压阀,它在自动化操作中可以实现高精度的控制,从而提高了自动化系统的
整体性能。
本文将介绍电液比例阀的设计和实验研究,总结电液比例阀的
应用特点,以及电液比例阀的优缺点。
二、电液比例阀的设计原理
电液比例阀是一种智能控制的液压阀,它的设计基本上与其他液压阀
一样,它也分为阀内部和阀外部两大部分。
电液比例阀的阀内部包括阀体、活塞、活塞杆、活塞杆定位器和活塞密封垫等零件,这些部件组成了电液
比例阀的核心部分;阀外部则由连接管路、电控装置、指示仪表等组成。
电液比例阀的工作原理是:利用电控装置将控制信号转换为有效的液压信号,通过操作活塞控制液压介质的流量大小和方向,实现液压设备的控制
操作。
一般来说,电液比例阀的阀芯结构有金属丝活塞阀、活塞杆阀、隔膜
阀和回路阀等常见类型。
BD-2000K-50 型电液比例阀控制器(单比例)

BD-2000K-50型电液比例阀控制器(单比例)一、概述BD2000K-50型电液比例阀控制器是一种比例功率放大器,可分别对力士乐、威克斯、油研、台湾东锋和机立等厂家的各类电液比例阀进行压力或流量的控制。
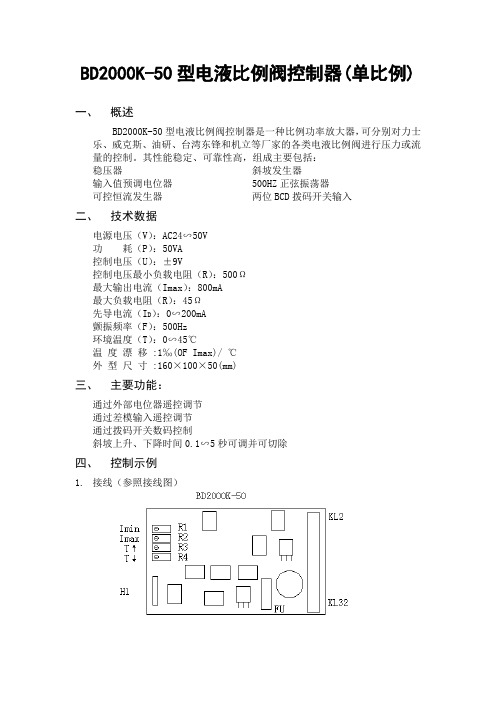
其性能稳定、可靠性高,组成主要包括:稳压器斜坡发生器输入值预调电位器500HZ正弦振荡器可控恒流发生器两位BCD拨码开关输入二、技术数据电源电压(V):DC/AC24∽50V功耗(P):50VA控制电压(U):±9V控制电压最小负载电阻(R):500Ω最大输出电流(Imax):800mA最大负载电阻(R):45Ω先导电流(I D):0∽200mA颤振频率(F):500Hz环境温度(T):0∽45℃温度漂移 :1‰(OF Imax)/ ℃外型尺寸 :160×100×50(mm)三、主要功能:通过外部电位器遥控调节通过电脑(PLC)DA模块输出控制(0-10V/0-5V)通过差模输入遥控调节通过拨码开关数码控制斜坡上升、下降时间0.1∽5秒可调并可切除四、控制示例1. 接线(参照接线图)①KL24和KL18接AC24V电源。
②KL20和KL22接比例电磁铁两端。
③若采用电位器输入方式(0∽9V),则KL12接外部电位器输入端,9V电源从KL10和KL14引出,KL10为+9V,KL14为0V。
④若采用差模输入方式(0∽10V),则KL32和KL28接差模输入,KL28接正端,KL32接负端。
⑤电脑(PLC)DA模块输出控制方式有两种接线方式。
方式一:采用电位器(电平)输入接口方式二:采用差模输入接口⑥若采用BCD码拨码开关输入则H1为BCD码输入插座,其各脚定义如下:序号 1 2 3 4 5 6 7 8 9 10功能+9V 1 2 4 8 1 2 4 8 输入电源十位个位拨码开关的公共端(COM)接+9V(1、2脚),十位接3--6脚,个位接7--10脚。
⑦KL4和KL2接斜坡切除继电器,将KL2和KL4接通,斜坡时间为:0.1秒2.调试①.将各输入端接MO(0V、KL14)或断开,调节R1得到初始电流(Imin),顺时针方向旋转初始电流(Imin)增加。
新型电液比例阀的设计及其控制方法的研究

新型电液比例阀的设计及其控制方法的研究
Key Words: Electro-hydraulic proportional pressure valve; CFD; PID algorithm; PWM; Steady-state model; Dynamic Model; Simulation
IV
湖 南 大 学 学位论文原创性声明
本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取 得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其 他个人或集体已经发表或撰写的成果作品。 对本文的研究做出重要贡献的个 人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果 由本人承担。
湖南大学 硕士学位论文 新型电液比例阀的设计及其控制方法的研究 姓名:黄勇 申请学位级别:硕士 专业:机械制造及其自动化 指导教师:胡思节 20070410
新型电液比例阀的设计及其控制方法的研究
摘
要
电液比例阀是实现电液比例控制技术的关键控制器件。由于其较好的控制精 度和稳定性,电液比例阀已开始逐渐代替传统控制阀。 电液比例压力控制阀是电液比例阀中的一种,其功用是对液压系统中的油液 压力进行比例控制,进而实现对执行器输出力或输出转矩的比例控制。论文在参 照国内外成熟产品的基础上,运用现代设计方法和分析手段设计了一种新型比例 压力阀的结构。首先,设计了十几种阀芯和阀腔的几何结构 , 根据计算流体力学的 理论,对每一种阀的流道建立数学模型。其次,借助商业软件 ANSYS/FLOTRAN 和 CFX 求解流道中的速度、压力数值解 , 根据求解的数据 , 分析出阀内流道的几何形 状对流场的影响。最后 , 根据所得结论优化出一种新型的阀芯和阀腔结构。 在比例压力阀的控制电路设计中, 以单片机控制系统、 数字 PID 算法和 PWM ( 脉冲宽度调制 ) 技术为研究对象。根据电液比例阀的控制要求,编制了系统控制 程序,设计了单片机控制系统的电路和功率放大电路,使控制电路的精度和可靠 性大大提高。 将阀的工作状态抽象成数学模型是研究现代液压系统的主要方法。论文运用 运动学和动力学理论,建立了所设计的电液比例压力阀的稳态和动态数学模型, 得到了系统的传递函数。另外 , 求解系统模型中的参数成为一个重要问题,论文中 同样以计算流体力学为理论依据,通过有限元等数值方法,计算出流量系数等重 要参数。为了研究阀的稳态、动态特性,将传递函数转换为 MATLAB/SIMULINK 软件包的方框图模型,利用计算机仿真技术得到阀的阶跃输入响应。然后,研究 了不同结构对阀稳态与动态特性的影响,为进一步优化阀的结构提供了理论上的 参考依据。 关键词:电液比例压力阀; CFD ; PID 算法;脉宽调制;稳态模型;动态模型; 仿真
电液比例阀控制系统的研究设计
电液比例阀控制系统的研究设计陈斌;杨安平【摘要】This paper studies the PID algorithm based on electro-hydraulic proportional valve control system, it is a kind of software instead of part of the complex hardware control system, this system can effectively solve the traditional proportional valve technical problems, and its strong control function, low maintenance cost, the control system has high control precision and system structure is relatively simple. In the circuit design of the system, the single chip microcomputer control system, the digital PID algorithm and PWM (pulse width modulation) technology as the research object, designs the system circuit and the power amplification circuit, and writes the system control program.%实现了基于PID算法的电液比例阀控制系统,系统可以有效解决传统比例阀技术的问题.其控制功能强大、维护成本低、系统控制精度高且结构相对比较简单。
在系统电路设计中,以单片机控制系统、数字PID算法和PWM技术为研究对象,设计了系统电路和功率放大电路,并编写了系统控制程序。
BD2000K-50型电液比例阀控制器(单比例)
BD2000K-50型电液比例阀控制器(单比例)一、概述BD2000K-50型电液比例阀控制器是一种比例功率放大器,可分别对力士乐、威克斯、油研、台湾东锋和机立等厂家的各类电液比例阀进行压力或流量的控制。
其性能稳定、可靠性高,组成主要包括:稳压器斜坡发生器输入值预调电位器500HZ正弦振荡器可控恒流发生器两位BCD拨码开关输入二、技术数据电源电压(V):AC24∽50V功耗(P):50VA控制电压(U):±9V控制电压最小负载电阻(R):500Ω最大输出电流(Imax):800mA最大负载电阻(R):45Ω先导电流(I D):0∽200mA颤振频率(F):500Hz环境温度(T):0∽45℃温度漂移 :1‰(OF Imax)/ ℃外型尺寸 :160×100×50(mm)三、主要功能:通过外部电位器遥控调节通过差模输入遥控调节通过拨码开关数码控制斜坡上升、下降时间0.1∽5秒可调并可切除四、控制示例1. 接线(参照接线图)①KL24和KL18接AC24V电源。
②KL20和KL22接比例电磁铁两端。
③若采用电位器输入方式(0∽9V),则KL12接外部电位器输入端,9V电源从KL10和KL14引出,KL10为+9V,KL14为0V。
④若采用差模输入方式(0∽10V),则KL30和KL28接差模输入,KL28接正端,KL30接负端。
脚。
⑥KL4和KL2接斜坡切除继电器,将KL2和KL4接通,斜坡时间为:0.1秒2.调试①.将各输入端接MO(0V、KL14)或断开,调节R1得到初始电流(Imin),顺时针方向旋转初始电流(Imin)增加。
②.输入端KL12接+9V(KL10),调节R2得到最大输出电流(Imax),反时针方向旋转最大输出电流(Imax)增加。
③.调节R3可改变斜坡上升时间(T↑),最大时间5秒(对应最大输出电流Imax),顺时针方向旋转斜坡上升时间(T↑)增加。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
p r o p o t r i o n a l v a l v e. a n d lo f w d e z o l 2 e c f m b e r e d u c e d b y e x e r t i n g c e r t a i n i n i t i a l c u  ̄ e n L A c c o r d i n g t o t h e d i s dv a nt a a g e o f
A b s t r a c t : B a s e d o n a n a l y s i s o f s t a t i c c h a r a c t e r s i t i c o f e l e c t r o - h y d r a u l i c p r o p o r t i o n a l v a l v e ,t h e rt a i c l e d e s i g n s h rd a w re a c i r c u i t o ft h e c o n t r o l l e r, p r o p o s e s a l z e w m e t h o d o fg e n e r t a i n g s t e p s i g ,  ̄ u s i n g P WM . B y c h ng a i n g g r a o P WM s , i t s o l v e s n o — i m p ct a t r a n s i t i o n o f t h e c o n t r o l l e d s y s t e m’ S p r e s s u r e o r s p e e d a n d s i m p l i i f e s h r a d w re a c i r c u i t .
De s i g n o f Co n t r o l l e r Us e d b y E l e c t r o - Hy dr a u l i c Pr o p o r t i o n a l Va l v e
YUAN Yu — x i a n,LI N Gu o -z h i ,LI U Zha o
( E n g i n e e i r n g B a s i c E x p e i r m e n t a l C e n t e r , Q i n g d a o B i n h a i U n i v e r s i t y , S h a n d o n g Q i n g d a o 2 6 6 5 5 5 , C h i n a )
机 械 设 计 与 制 造
8 6 Ma c h i n e r y De s i g n & Ma n u f a c t u r e
第 8期 2 0 1 7年 8月
电液 比例 阀用控 制 器 的设 计
袁玉先 , 林 国治 , 刘 钊
2 6 6 5 5 5 ) ( 青 岛滨海学 院 实验中心, 山东 青 岛
t e m p e r tu a r e d 啦 t h t a C O n b e c a u s e d b y t h e t r a n s s i t o r p a r a m e t e r s ’ s c h ng a e , i t i m p r o v e s t h e t r di a t i o n lp a o w e r mp a l i i f e r c i r c u i t , t o a c e t r a i n e x t e n t , s u p p r e s s t h e t e m p e r t a u r e d r t. f i B y o n - l i n e s i mu l t a i o n a n d m t a e r i l a o e c t t e s t , i t v e r fe i s i t s v li a d i t y nd a c o r r e c t es n s fh o a r d w a r e c i r c u i t d e s i g n ft o h e c o n t r o l l e r , a n d i m p r o v e s i t s a c c u r cy a nd a s t a b i l i t y .
摘
要: 在分析 电液 比例 阀静态特性 的基础上 , 设计 了控 制器的硬件电路 , 提 出了一种利用 P WM信号产生阶跃信号 的
新方法 , 通过 P WM信号 占空比的阶梯式变化解决 了被控 系统压 力或速度的无冲击过渡 , 有利 于简化硬件电路 。同时 , 给 比例电磁铁施加一定的颤振信号和先导电流可以改善阀心的动 态性能并减小流量死 区。根据晶体管参数随温度 变化会 引起温度 漂移的缺点, 对传统的功 率放大电路进行 了改进 , 在一定程度上抑制 了温度 漂移。经过在线仿真和 实物实验 , 验 证 了控 制器的硬件 电路设计的有效性和正确性 , 提 高了其精度和稳定性 。 关键词 : 电液比例阀 ; 脉宽调制 ; 阶跃信号; 颤振 中图分类号 : T H1 6 ; T P 2 7 1 文献标识码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 7 ) 0 8 — 0 0 8 6 — 0 4