周转轮系的传动比计算
传动比计算

传动比计算一、已知轮系中各齿轮的齿数分别为Z 1=20、Z 2=18、 Z 3=56。
求传动比i 1H 。
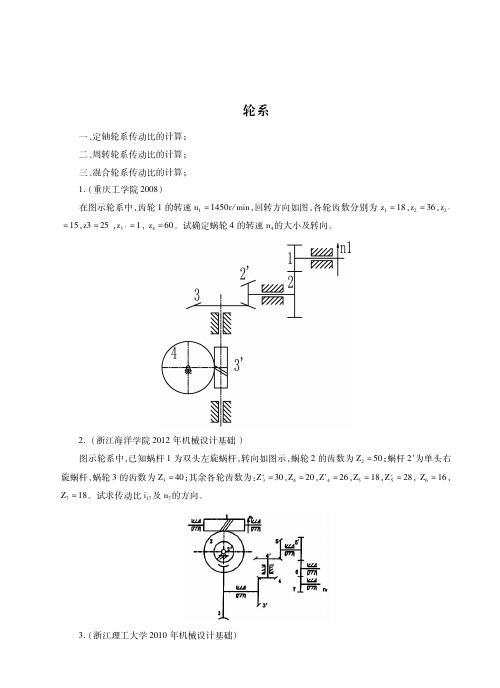
解:1-3为太阳轮,2为行星轮,H 为行星架8.22056133113-=-=-=--=z z n n n n i H HH03=n 8.31=∴H i1、如图所示轮系中,已知241=z ,482=z ,302='z ,903=z ,403='z ,204=z ,805=z ,求传动比i H 1。
又当 n 1=1450r/min时,n H =?(15分)2、 图示轮系,已知:Z 1=20,Z 2=40,Z 3=80,Z 4=Z 5=30,Z 6=90。
求i 16=n3=n4(n4/n6)=(z6/z4)=3 nH=n6(n1-n6)/(n3-n6)=-(z3/z1)=-4i16=-7解:1、2、3、H 为周转轮系,()()63024904821323113-=⨯⨯=-=--='Z Z Z Z n n n n i H H H3/、4、5为定轴轮系23535353-====''H n nn n n n i 得H n n 23-=联立以上二式得 ()()()()62131-=---=--H H H H H n n n n n n n n所以1911==HH n n i min /3.76191r n n H ==2、Z 1=15,Z 2=25,Z 3=20,Z 4=60。
n 1 =200r/min (顺时针)n 4=50r/min (顺时针)试求H 的转速。
解:1、4为太阳轮,2、3为行星轮,H 为行星架52015602531424114-=⨯⨯-=-=--=z z zz n n n n i H H Hmin/75550200r n n n H H H=-=-- H 的转速为75r/min ,顺时针方向。
步骤:1. 先看准图,看清图!2. 拆分!3. 按照拆分的结果进行组合!4. 1、 图示为滚齿机滚刀与工件间的传动简图,以知各轮的齿数为:Z 1=35,z 2=10,Z 3=30,z 4=70,Z 5=40,Z 6=90,Z 7=1,Z 8=84.求毛坯回转一转时滚刀轴的转数。
周转轮系的传动比计算
周转轮系的传动比计算周转轮系是一种用于传输运动和力的机械装置,常用于车辆和工程机械等设备中。
传动比是周转轮系中的重要参数,用于描述输入轮与输出轮的转速比和力的大小,决定了输出轮的转速和扭矩。
计算周转轮系的传动比需要确定输入轮和输出轮的直径。
假设输入轮的直径为D1,输出轮的直径为D2,其对应的转速分别为N1和N2、则周转轮系的传动比可以由下面的公式计算得到:传动比=N2/N1=D1/D2其中,传动比表示输出轮相对于输入轮的转速增益。
如果传动比大于1,输出轮的转速将大于输入轮的转速;如果传动比小于1,输出轮的转速将小于输入轮的转速;如果传动比等于1,输出轮的转速与输入轮的转速相等。
在实际应用中,周转轮系的传动比可以通过以下几种方式计算和确定。
1.机械传动计算法:根据输入轮和输出轮的直径来计算传动比。
这种方法适用于已知直径和转速的情况,但需要知道输入轮和输出轮的几何参数。
2.编码器计算法:通过安装编码器在输入轮和输出轮上,实时测量转速,然后计算传动比。
这种方法能够较准确地测量转速,但需要安装编码器和进行实时测量。
3.转速传感器计算法:通过安装转速传感器在输入轮和输出轮上,测量转速并传输给计算设备,然后计算传动比。
这种方法能够较准确地测量转速,但需要安装转速传感器和进行实时测量。
4.模拟计算法:根据输入轮和输出轮的转速曲线来进行传动比的估算。
这种方法能够通过分析转速曲线得到传动比的趋势,但需要输入轮和输出轮的转速曲线数据。
总之,传动比是周转轮系中的重要参数,能够描述输入轮和输出轮之间的转速和扭矩关系。
计算传动比需要确定输入轮和输出轮的直径,并可以通过机械传动计算法、编码器计算法、转速传感器计算法或模拟计算法来进行。
通过计算传动比可以优化周转轮系的设计和使用,满足具体设备的要求。
《机械原理》 轮系的传动比
原周转轮系角速度
1 2
3
H
转化轮系中的角速度
1H 1 H 2H 2 H
3H 3 H
HH H H 0
2.传动比计算的基本思路与方法
根据定轴轮系传动比的公式,可写出转化轮系传动比
iH
13
i1H3
1H 3H
1 H 3 H
z2z3 z1 z 2
z3 z1
“-”号表示在转化机构中1H
z3 z1
2.2 周转轮系传动比的计算
1.周转轮系的组成与类型 2.传动比计算的基本思路与方法 3.注意事项 4.计算实例
例1 已知:双排外啮合行星轮系
z1 100, z2 101, z2 100, z3 99
求:传动比 iH1
解:
i1H3
1H
H 3
1 3
H H
z2 z3 z1 z2
第7章 轮系
1 轮系的类型 2 轮系的传动比 3 轮系的功能 4 轮系的设计 5 其他类型的行星传动简介
第7章 轮系
2 轮系的传动比
2.1 定轴轮系传动比的计算 2.2 周转轮系传动比的计算 2.3 混合轮系传动比的计算
2.1 定轴轮系传动比的计算
1.传动比大小的计算 2.主、从动轮转向关系的确定
只起改变方向作用
称为惰轮
定 轴 轮 系 的 传 动 比
所 有 从 动 轮 齿 数 的 连 乘积 所 有 主 动 轮 齿 数 的 连 乘积
2.1 定轴轮系传动比的计算
2 .传动比方向的确定
平面定轴轮系 所有齿轮均为直齿或斜齿圆柱齿轮,
可用(-1)m 来确定从动轮的转动方向。
m —— 外啮合的对数。
传动比为正,说明主、从动轮转向
轮系考研真题
8.(山东轻工业学院 2010年) 在如图所示轮系中,已知运动由齿轮 1输入,其转速 n1=3549r/min。z1=36,z2=60,z3=23,z4 =49,z4’ =69,z5=31,z6=131,z7=94,z8=36,z9=167。 (1)分析轮系的组成,划分出各个单一的周转轮系和定轴轮系; (2)求 nH =?
2.(浙江海洋学院 2012年机械设计基础 ) 图示轮系中,已知蜗杆 1为双头左旋蜗杆,转向如图示,蜗轮 2的齿数为 Z2=50;蜗杆 2′为单头右 旋蜗杆,蜗轮 3的齿数为 Z3=40;其余各轮齿数为:Z'3=30,Z4=20,Z′4=26,Z5=18,Z'5=28,Z6=16, Z7=18。试求传动比 i17及 n7的方向。
3.(浙江理工大学 2010年机械设计基础)
在图所示差动轮系中,已知各轮的齿数 z1=30,z2=50,z2′=20,z3=75,齿轮 1的转速为 200r/min (箭头向上),齿轮 3的转速为 50r/min(箭头向下),求行星架转速 nH的大小和方向?
4.(浙江理工大学 2010年机械设计基础) 在图所示的轮系中,已知,z1=z4=40,z2=z5=30,z3=z6=100,的大小和方向。
7.(昆明理工大学 2010年机械原理考研真题) 图示的轮系中,已知各轮齿数为 z1=32,z2=34,z2’ =36,z3=64,z4=32,z5=17,z6=24,若轴 A按 图示方向以 1250r/min的转速回转,轴 B按图示方向以 600r/min的转速回转,试确定轴 C的转速大小 和方向。
9.(深圳大学 2011年机械设计基础)
图示为传动装置。1为单头右旋蜗杆,2为蜗轮,其齿数 z2=100,其余各轮的齿数分别为 z2’ =z4, z6=z8,z4’ =80,z5=20,运动由蜗杆 1和齿轮 5同时输入,由齿轮 6输出,若 n1 =n5 =1000r/min,转向 如图所示,求齿轮 6输出的运动 n6的大小和方向。
轮系的传动比计算
轮系的传动比计算1源自新能源汽车技术教学资源库一、轮系的传动比
轮系中首末两轮的转速之比称为轮系的传动比,用iab表
示。
iab na / nb
轮系的传动比计算,包括计算传动比的大小和确定转向两 个内容。
新能源汽车技术教学资源库
二、定轴轮系的传动比计算
z5 n4 i45 n5 z4
z 2 z3 z 5 n1 3 z 2 z 3 z 4 z5 i15 (1) n5 z1 z2 z3 z4 z1 z 2 z3
新能源汽车技术教学资源库
轮系传动比的一般表达式:
n表示外啮合的次数。
n主 n 各从动轮齿数的乘积 i ( 1 ) n从 各主动轮齿数的乘积
新能源汽车技术教学资源库
例4-7
图示轮系中,已知各轮齿数z1=20,z2=40,z2’=20,z3=30,
解: (1)分解轮系 定轴轮系:轮1,2 周转轮系:轮2’,3 ,H,4 (2)分别计算各轮系传动比 定轴轮系传动比:
z4=80。计算传动比i1H。
i12
(3)联立以上两式,得
n1 z2 2 n2 z1
齿轮4既是从动轮,又是主动轮,其存在不影响传动比,但改
变了外啮合的次数,称为过桥齿轮或惰轮。
(1)对于圆柱齿轮组成的定轴轮系确定传动比正负的方法: a.外啮合的次数; b.画箭头。 (2)当轮系中包含圆锥齿轮、蜗杆蜗轮时,传动比的计算仍用上 式计算,但各轮的转向必须画箭头确定。 a.当首末两轮轴线平行时,仍用正负表示两轮之间的关系。 b.当首末两轮轴线不平行时,不能用正负表示,只能依次画箭
解得
iH1 10000
新能源汽车技术教学资源库
机械设计-周转轮系传动比的计算

目
录
1
各构件名称
2
传动比的计算
周转轮系传动比的计算
机械设计与应用技术
各构件名称
行星轮:齿轮2
中心轮:齿轮1和3
行星架:H
机械设计与应用技术
周转轮系传动比的计算
传动比的计算
反转原理
给周转轮系施以附加的公共转动-ωH后,将
不改变各构件之间的相对运动,但原轮系将转
化成为一新的定轴轮系。
个量时,应将其本身的正负号代入。
4、 ≠
, 只能借助于
才能求出。
周转轮系传动比的计算
例:轮系中, z1= z2 = 20, z3 = 60
(1)轮3固定,求i1h
(2) n1=1r/min, n3=-1r/min,求n1h和i1h
机械设计与应用技术
机械设计与应用技术
周转轮系传动比的计算
机械设计与应用技术
特别注意事项
1、齿轮1、k、H的轴线必须平行且共线,方可以引入-ωH
2、计算公式中的“±”不能去掉,它不仅表明转化轮系中两个中
心轮1、k之间的转向关系,而且影响到ω1、 ωk、 ωH的计算结果
3、式中的ω1、 ωk、 ωH均为代数量,已知其中的两个量,求解第三
周转轮系传动比的计算
H1H3H来自1 −H3 −H
=
解:(1)13 =
60
=−
= −3
20
∴
=
1 −H
0−H
=
2 3
−
1
2
=
3
−
1
H
1
= 4 齿轮1和系杆转向相同
H
(2)13 =
1H
毕业设计论文-周转轮系传动效率计算
第1 章前言1.1 引言轮系传动时,有一个或几个齿轮的几何轴线位置不固定,而是绕其它齿轮的固定轴线回转,这种轮系被称作周转轮系[1],如图1.1所示。
周转轮系是由太阳轮,行星轮和行星架组成的。
围绕着固定轴线回转的齿轮,称为太阳轮。
如图1-1中的齿轮1和齿轮3;齿轮2围绕着自己的轴线作自转的同时又与构件H通过回转副相连一起绕着固定轴线作公转就像行星一样运动故称为行星轮。
其中构件H我们称为行星架,转臂或系杆。
图1.1周转轮系根据自由度数的不同,周转轮系可分为差动轮系和行星轮系两类。
差动轮系的自由度数为2,即轮系有两个独立运动的主动件,如图1-2(a)所示;行星轮系的自由度为1,这种轮系只有一个独立运动的主动件,如图1-2(b)所示。
图1.2周转轮系此外,周转轮系还常根据其基本构件的不同来加以分类。
通常将轮系中的太阳轮以K表示,行星架以H表示,如果轮系中有两个太阳轮就称为2K-H型周转轮系,如图1-3所示:若轮系中有三个太阳轮,而行星架只是起支承行星轮的作用就称为3K 型周转轮系,如图1-4所示:轮系中只有一个太阳轮,其运动是通过等角速机构由V 轴输出就称为K-H-V行星轮系,如图1-5所示。
图1.3 2K-H型周转轮系图1.4 3K型周转轮系图1.5 K-H-V行星轮系1.2 周转轮系传动发展现状自上世纪五十年代起国内就开始对行星传动技术进行开发及应用,它的发展分为二个阶段,改革开放之前受技术水平,设计理念等因素的影响,行星传动技术处于比较低的水平,大部分行星齿轮箱仍需要从国外进口;改革开放之后随着国内科学技术的发展,国家为推进这方面技术的发展采用与研究所,高校,企业强强联合方式,在积极引进了国外先进的行星传动技术的同时对其关键的技术进行研究突破。
当前,国内行星传动技术多采用2K-H轮系传动,已发展了许多类型的系列产品,如我国应用较为普遍的通用行星齿轮减速器系列产品(JB/T6502-1993),此外还有分别用于立磨、辊压机、铝铸轧机、矿井提升机、管磨机、风电增速箱、水电增速箱及堆取料机上的行星齿轮箱等多种型式的专用系列产品[2],如100t铸锭吊车主卷扬机行星减速器,15t转炉倾动装置差动减速器,5t电动葫芦的传动装置,50t转炉吹氧管卷扬机差动行星轮减速器。
周转轮系的传动比计算
一、反转法原理
二、转化轮系的传动比
一、反转法原理
动 画
n1 i13 ? n3 n1 i1H ? nH n3 i3H ? nH
差动轮系 F=3×4-2×4 -2 = 2 两个原动件,1、3、H任2个
动 画
i13 i1H i3H
n1 ? n3 n1 ? nH
n2 1 n1 n2 10 5 5r/min n2 2 n2 n2 5 5 0r/min n2 3 n3 n2 10 5 15r/min
2 n 5 1 2 i13 12 n3 15 3
n3 = -10 r/min n1 10 i13 1 n3 10
z 2 z3 z3 n1 nH i n3 nH z1 z 2 z1
H 13
n1 nH 90 3 0 nH 30
i1H n1 4 nH
动画 nH=50r/min 1、H转向相同
200 4 nH
例题:n1=250rpm, n3=100rpm,转向相反,求nH。 z1 48 z2 48 z z n n H i13 1 H 2 3 z2 18 z3 24 n3 nH z1 z 2
H 13
n1 3n3 nH 4
动画
1、3、H同向 3、H同向
4 200 3 100 1、3反向 nH 25 r / min 4
1、3同向 nH 200 3 100 125 r / min
运动合成
例题:z1=30,z3=90,n1=200r/min, i1H、nH=?
3
v23=v3-v2=-5-10=-15m/s v22=v2-v2=10-10=0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图示轮系中,已知:Z 1 Z 2 30, Z 3 90, 例2. 轮1与系杆转速均为n1 nH 1rpm , 且转向相 反。求: n3 ?
Z2
H
n1 nH Z3 解: i n3 nH Z1 n1 nH 90 3 n3 nH 30
H 13
令n1 转向为正 , n 为负。 转向为正 , n H H 1
Z1 Z3
1 1 ( 1 ) 1 则 :: 则 33 n3 ( 1) n 3 1 5 5 ((与 与n nH 同向)) n3 3 H同向 3 3
例3.图示轮系中, 已知: Z1 Z 3 40, Z 2 30. 求: i1 H ? 解:
作业:
P 196197
65 66 6 11
周转轮系的动比计算
赵 爽
上海电机学院
知识回顾
一、定轴轮系传动比计算公式:
i AB
A 所有从动齿轮齿数的乘积 B 所有主动齿轮齿数的乘积
注: 公式中齿数比前符号的确定
二、周转轮系传动比的计算
(Transmission ratio of epicyclic gear train)
基本思想: 给整个周转轮系加上一个与系杆 H的角速度大小相等,方向相反的公 设法把周转轮系转化成定轴轮 共角速度 H ,系杆的角速度变为0 系,然后间接利用定轴轮系的传动 ,即系杆静止,整个周转轮系转化 比公式来求解。 为假想的定轴轮系。
i13 H
Z 2 Z3 Z3 1H 1 H H 3 H Z1Z 2 3 Z1
H H H H o
1H 1 H 2H 2 H 3H 3 H
转化机构 转化机构
周转轮系的传动比计算公式:
i
H AK
H 3 、齿数比前符号的判定: H 、 、 注意事项: 2 。公式中当 i i , i AK已知两者 4。 AK AK iAK 相对传动比, 绝对传动
i1H ? 例1:已知:下图轮系中各轮齿数,求:
2
解:由转化机构可得
i13
H
H
H 1 H 3
1 H 3 H
Z1
3 0代入上式:
i1 H 1
iH 1 10000 100
iH1
1
10000
总结:
(1)周转轮系从动轮的转向不仅与主动轮转向 有关,还与齿数有关。 (2)周转轮系齿数相差不多,却可以获得很大 的传动比。
(3)周转轮系的齿数略有改变,可引起传动比 较大改变。
二、周转轮系传动比的计算
(Transmission ratio of epicyclic gear train)
2
H
转化机构法: 将整个机构 加上 ( H )
2
H
1
3
(将H固定)
1
3
2 1
H
转化机构法: 将整个机构 加上 ( H ) (将H固定)
2 1
H
3
3
原机构 构件 原机构 转化机构 H 1 1 1 H 2 2 2 H 3 3 3 H H H H
Z 2 Z3 Z3 ( A) Z1 Z1Z2
3 0
1
3
( A)式得:1 i1 H
i1 H Z3 1 i 1H Z1
1 i
Z3 Z1
H 13
在中心轮固定的行星轮系中,活动中心轮对系杆H的传动比, 等于1减去转化机构中的活动中心轮对原固定中心轮的传动比。
1 H Z2 Z3 i13 3 H Z 1 Z 2'
101 99 1 如将Z 3 改为 100, 则: Z3 1 H 100 10100 100 1 H 101 100 H 1 i13 ;1 HH 10000 9999 3 H 100 100
Z2
H
1 H Z3 i 3 H Z1
H 13
Z1
Z3
1 1 1 H
1 2 H
i1 H
图示轮系中,已知:Z 例4、 ? 1 100, Z 2 101, Z 2 100, Z 3 99。求:iH 1 ?
Z2
H
Z 2'
解H :
H A H K A K
H H
转化机构中A、K间所有从动轮齿数的连乘积 转化机构中A、K间所有主动轮齿数的连乘积
平面周转轮系: m转化机构中外啮合次数; H 即可求出第三个;且上述三角速度必须是 1。公式中 iAK中的A、K 一定是两个中 比; 空间周转轮系:转化机构中齿数比前符号 平行矢量,代数时必须连同符号一并代入。 心轮(特殊时为一个中心轮和一个行星轮 ). 判定同定轴轮系。?