Workbench心得——行星齿轮瞬态动力学讲解
workbench瞬态动力分析

积分时间步长
• AUTOTS对于全瞬态分析缺省是打开的. 对于缩 减法和模态叠加法,是不可用的. • AUTOTS 会减小ITS (直到 Dtmin) 在下列情况:
– – – – – – 在响应频率处,小于20个点 求解发散 求解需要大量的平衡迭代(收敛很慢) 塑性应变在一个时间步内累积超过15% 蠕变率超过0.1 如果接触状态要发生变化 ( 决大多数接触单元可由 KEYOPT(7) 控制)
分析选项
• 求解器选择
– 缺省ANSYS选择稀疏求解器 – 对于大自由度问题 (>100000 dofs) 使用PCG法
初始条件
• 初始条件
– 时间t = 0时的条件:u0 ,v0,a0 – 它们的缺省值为, u0 = v0 = a0 = 0 – 可能要求非零初始条件的实例:
• 飞机着陆 (v00) • 高尔夫球棒击球 (v00) • 物体跌落试验 (a00)
分析选项
• 输出控制
–用来控制写到结果文件的内容. –使用命令 OUTRES 或选择 Solution > Sol’n Control.. > Basic –通常的选项用来将每个子步的结果写到结果文件中去.
• 可光滑绘制结果与时间的关系曲线. • 可能造成结果文件庞大.
分析选项
• 瞬态效应 on/off
分析过程
• 讨论完全法瞬态分析过程. • 五个主要步骤:
– – – – – 建立模型 选择分析类型和选项 指定边界条件和初始条件 施加载荷历程并求解 查看结果
模型: 所有的非线性因素可允许注意要求密度!
分析选项
– – – – 进入求解阶段,并选择瞬态分析. 选择完全法 求解选项 阻尼
• 求解方法
– 完整矩阵方法为缺省方法。允许下列非 线性选项:
ansys_workbench瞬态动力分析(4)分析
积分时间步长
Training Manual
• AUTOTS对于全瞬态分析缺省是打开的. 对于缩 减法和模态叠加法,是不可用的. • AUTOTS 会减小ITS (直到 Dtmin) 在下列情况:
– – – – – – 在响应频率处,小于20个点 求解发散 求解需要大量的平衡迭代(收敛很慢) 塑性应变在一个时间步内累积超过15% 蠕变率超过0.1 如果接触状态要发生变化 ( 决大多数接触单元可由 KEYOPT(7) 控制)
缩减/完整结构矩阵
Training Manual
• 求解时既可用缩减结构矩阵,也可用完整结构矩阵; • 缩减矩阵:
– 用于快速求解; – 不允许非线性因素存在 – 根据主自由度写出[K]、[C]和[M]等矩阵,主自由度是完全自由度 的子集; – 缩减的 [K] 是精确的,但缩减的 [C] 和 [M] 是近似的。
Training Manual
DYNAMICS 11.0
• 求解方法
– 完整矩阵方法为缺省方法。允许下列非 线性选项:
• 大变形 • 应力硬化 • Newton-Raphson 解法
• 集中质量矩阵
– 主要用于细长梁和薄壁壳或波的传播
• 方程求解器
– 由程序自行选择
分析选项
• 求解选项 • 选择大位移瞬态分析 或小变形瞬态分析 .
DYNAMICS 11.0
• 完整矩阵:
– 不进行自由度缩减,采用完整的[K]、[C]和[M]矩阵; – 下面的讨论都是基于此种方法。
积分时间步长
Training Manual
• 积分时间步长(亦称为ITS 或 Dt )是时间积 分法中的一个重要概念
– ITS = 两个时刻点间的时间增量 Dt ; – 积分时间步长决定求解的精确度,因而其数值应仔 细选取。 – 对于缩减矩阵法与模态叠加法瞬态分析ANSYS 只 允许ITS常值. – 完全法瞬态分析, ANSYS 可以自动调整时间步大 小在用户指定的范围内
ansysworkbench瞬态动力学实例
在本文中,我将为您撰写一篇关于ANSYS Workbench瞬态动力学实例的文章。
我们将深入探讨ANSYS Workbench在瞬态动力学仿真方面的应用,从简单到复杂、由浅入深地讨论其原理和实践操作,并共享个人观点和理解。
第一部分:介绍ANSYS Workbench瞬态动力学仿真ANSYS Workbench是一种用于工程仿真的全面评台,包含了结构、流体、热传递、多物理场等多种仿真工具。
瞬态动力学仿真是ANSYS Workbench的重要应用之一,它能够模拟在时间和空间上随机变化的动力学过程,并对结构在外部力作用下的动力响应进行分析。
在瞬态动力学仿真中,ANSYS Workbench可以模拟诸如碰撞、冲击、振动等动态载荷下的结构响应,用于评估零部件的耐久性、振动特性、动态稳定性等重要工程问题。
通过对这些现象的模拟和分析,工程师可以更好地了解结构在实际工况下的性能,进而进行有效的设计优化和改进。
第二部分:实例分析为了更直观地展示ANSYS Workbench瞬态动力学仿真的应用,我们以汽车碰撞仿真为例进行分析。
假设我们需要评估汽车前部结构在碰撞事故中的动态响应,我们可以通过ANSYS Workbench建立汽车前部结构的有限元模型,并对其进行碰撞载荷下的瞬态动力学仿真。
我们需要构建汽车前部结构的有限元模型,包括车身、前保险杠、引擎盖等部件,并设定材料属性、连接方式等。
接下来,我们可以在仿真中引入具体的碰撞载荷,如40km/h车速下的正面碰撞载荷,并进行瞬态动力学仿真分析。
通过仿真结果,我们可以获取汽车前部结构在碰撞中的应力、应变分布,以及变形情况,从而评估其在碰撞事故中的性能表现。
第三部分:个人观点与总结通过以上实例分析,我们可以看到ANSYS Workbench瞬态动力学仿真在工程实践中的重要应用价值。
瞬态动力学仿真不仅能够帮助工程师分析结构在动态载荷下的响应,还可以为设计优化、安全评估等工程问题提供重要参考。
行星齿轮原理的详细图文介绍含超详细的公式推导
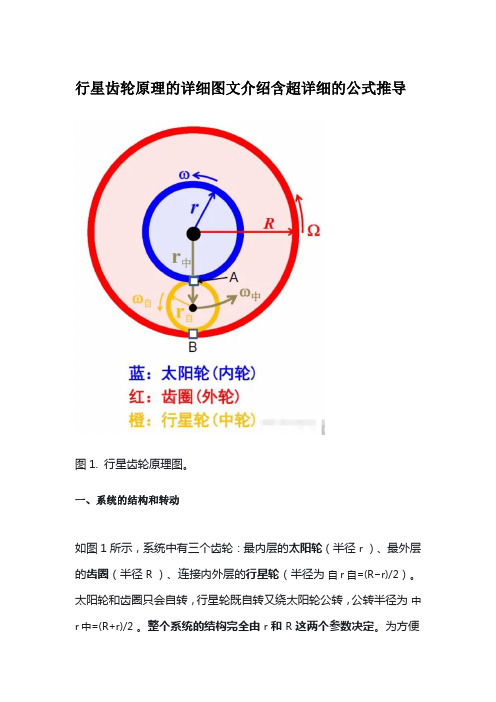
行星齿轮原理的详细图文介绍含超详细的公式推导图1. 行星齿轮原理图。
一、系统的结构和转动如图1所示,系统中有三个齿轮:最内层的太阳轮(半径r)、最外层的齿圈(半径R)、连接内外层的行星轮(半径为自r自=(R−r)/2)。
太阳轮和齿圈只会自转,行星轮既自转又绕太阳轮公转,公转半径为中r中=(R+r)/2。
整个系统的结构完全由r和R这两个参数决定。
为方便记忆,我们根据齿轮的位置,把太阳轮称为内轮,齿圈称为外轮,行星轮称为中轮。
三个齿轮一共有4种转动,每种转动由一个参数来描述,共4个参数(参见图1):(1)内轮的自转,由角速度ω描述;(2)外轮的自转,由角速度Ω描述;(3)中轮围绕自身的质心自转,由角速度自ω自描述;(4)中轮的质心围绕太阳轮的质心公转,由角速度中ω中描述。
【备注】所有的角速度都以逆时针为正方向:正值代表逆时针转,负值代表顺时针转。
然而,上述4个参数并不完全独立,因为中轮跟内、外轮都有接触。
中轮质心的线速度为中中ω中r中,而中轮的自转导致接触点A相对中轮质心的线速度为自自−ω自r自,因此中轮在接触点A处的线速度为中中自自ω中r中−ω自r自,它必须等于内轮在接触点A处的线速度ωr(否则在接触点会打滑);类似的,在接触点B,中轮的线速度中中自自ω中r中+ω自r自必须等于外轮的线速度ΩR(否则在接触点会打滑)。
于是我们得到两个约束条件:中中自自,中中自自,ωr=ω中r中−ω自r自,ΩR=ω中r中+ω自r自,它导致整个系统的4种运动(中自ω,Ω,ω中,ω自)中,只有两种是独立的,我们可以任意选择两个参数做为独立参数。
比较方便的选择是以ω,Ω为独立参数,它俩一旦确定,则中自ω中,ω自也就确定了(亦即中轮的转动完全由内、外轮的转动决定):中中自自ω中=ΩR+ωr2r中=ΩR+ωrR+r,ω自=ΩR−ωr2r自=ΩR−ωrR−r,图2. 行星齿轮如图2所示,实际的行星齿轮系统,包含许多个中轮共同绕着内轮公转,同时每个中轮也会绕各身的质心自转。
workbench瞬态动力分析

Dx IT20 L 波长方向的长度 c 弹性波速 E 杨氏模量 E
质量密度
非线性响应
• 非线性响应
–全瞬态分析可包括任何非线性类型. – 更小的 ITS 通常有助于平衡迭代收敛. – 塑性、蠕变及摩擦等非线性本质上是非保守的,需 要精确地遵循载荷加载历程.小的 ITS 通常有助于精 确跟踪载荷历程. – 小的ITS可跟踪接触状态的变化.
– 模态叠加法 – 直接积分法
• 运动方程可以直接对时间按步积分。在每个时间点(time = 0, Dt , 2Dt, 3Dt,….) ,需求解一组联立的静态平衡方程 (F=ma);
– 需假定位移、速度和加速度是如何随时间而变化的, (积分方案选择) – 有多种不同的积分方案,如中心差分法,平均加速度 法, Houbolt, WilsonQ, Newmark 等.
积分时间步长
• 如何选择 ITS? • 推荐打开自动时间步长选项 (AUTOTS), 并设置 初始时间步长Dtinitial和最小时间步长Dtmin 、最 大时间步长Dtmax. ANSYS 会利用自动时间步长 功能来自动决定最佳时间步长Dt. • 例如: 如果AUTOTS 是打开的, 并且Dtinitial= 1 sec, Dtmin= 0.01 sec, and Dtmax= 10 sec; 那 ANSYS 起始采用 ITS= 1 sec ,并依据结构的响 应允许其在0.01 和 10 之间变动.
缩减/完整结构矩阵
• 求解时既可用缩减结构矩阵,也可用完整结构矩阵; • 缩减矩阵:
– 用于快速求解; – 不允许非线性因素存在 – 根据主自由度写出[K]、[C]和[M]等矩阵,主自由度是完全自由度 的子集; – 缩减的 [K] 是精确的,但缩减的 [C] 和 [M] 是近似的。
workbench软件个人学习总结

workbench软件个⼈学习总结workbench软件个⼈学习总结接触区分workbench中的各种接触主要是从两个⽅⾯来区分,⼀个是是否允许法相分离,⼀个是是否允许切向位移。
注意不同软件对接触中各个⾯的叫法不唯⼀,⽬标⾯对应于主⾯,接触⾯对应从⾯(接触⾯⽹格⼩刚度⼩易变性)remote force与force区别remote force类似于abaqus中的耦合约束也就是我们所说的运动耦合(不可变形)与分布耦合(可变性),并且可以设置耦合区域的⾏为(变形或者不变形)。
此外我们应该注意workbench中刚体施加⼒或者位移载荷时使⽤remote force与remote displacement。
接触中adjust to touch与add offset. Offset = 0的区别Adjust to Touch: 如果有间隙,则消除间隙,如果没有,保持初始状态;Add offset, Offset=0: 保持初始状态,⽽不论有⽆间隙。
offect为正值,两个接触⾯靠近,offset为负值两个接触⾯远离。
两⾯如果有间隙在后处理中⼀样有间隙,只是处理时按照offset 的值将接触⾯做适当偏离。
接触中的pinball regionpinball region是接触的⼀个搜索范围,在此区域内的所有⾯都会被定义为可能发⽣接触的地⽅。
对于线性接触(绑定、不分离)⼀般不能指定pinball region,因为在pinball region区域内所有的⾯默认为接触。
当我们不能分辨加载载荷以后,接触的区域是我们⼀般使⽤pinnball region。
workbench过盈接触建模的时候不考虑过盈量,过盈量的设置通过workbench接触下⾯interface treatment 来处理,⼀般通过offect来设置。
时间积分效应所谓的时间积分效应,是指在完全法瞬态分析中与时间相关的⼀些因素,主要包括以下两个⽅⾯。
基于ansys workbench齿轮啮合刚度计算及动力学仿真

Keywords:involutetoothprofile;finiteelement;meshingstiffness;geardynamics;quasistaticmethod; contactratio;workbenchsoftware;gearvibration
齿轮是机械装置中的重要零部件,广泛应用 于汽车、航空等领域.啮合刚度是齿轮系统振动的 内部激励源之一,正确地求解啮合刚度以及齿轮 啮合动力学研究对工程实际具有重要意义.
啮合刚度是齿轮动力学分析中的重要参数,而 齿轮副在不同的工况下,实际重合度是不相同的, 齿轮动力学数值仿真时需要啮合刚度有明确的数 学表达式,因此多数学者对啮合刚度进行了曲线拟 合.引用最多的是文献[7]的方法,这些公式中都包 含重合度的因素,若将理论重合度下的啮合刚度公 式代入齿轮动力学方程,将会因为理论重合度与实 际重合度不同,导致动力学分析出现偏差.
第42卷 第2期 2020年 3月
沈 阳 工 业 大 学 学 报 JournalofShenyangUniversityofTechnology
Vol42No2 Mar2020
doi:10.7688/j.issn.1000-1646.2020.02.13
基于 ANSYSworkbench齿轮啮合刚度计算 及动力学仿真
王旭等[1]用材料力学的方法计 算 了 正 常 和 含裂纹齿轮的啮合刚度,并且对有、无裂纹齿轮副 进行了动力学特性分析;万志国等[2]考虑了齿轮 基体变形与齿根圆、基圆不重合的情况,进一步修
收稿日期:2018-03-02. 基金项目:国家自然科学基金项目(51075314);陕西省自然科学基础研究计划项目(2014JM7269). 作者简介:何育民(1968-),男,陕西西安人,副教授,博士,主要从事机械设备状态监测及故障诊断等方面的研究.
基于ansys workbench的电机行星齿轮结构设计研究与分析
表1电机参数
参数
项目
100 3000 320 380
峰值功率,kW 峰值转速,r/min 峰值扭矩,Nm 额定电流,Arms
参数
150 7800 800 150
表2行星齿轮参数
项目
参数
项目
输入峰值功率,kW 输入极限转速,r/min
150 7800
输出峰值扭矩,Nm
传动效率,(%)
参数 2400
>98
新能源汽车驱动电机技术对衡量电驱动汽车产 品可靠性起着决定性作用,目前市场中常用的驱动电 机有三项异步电机和永磁同步电机,因永磁同步电机 具有效率高、功率因素高、体积小、温升低等明显优 势,所以被广泛地应用于汽车上。基于以上因素,本团 队设计研发一款可稳定持续输出大扭矩、结构紧凑、 可靠性高、维护保养成本低的行星排驱动电机,并借 助ANSYS Workbench平台对其核心零部件结构强度
A : Static Structural Equivalent Stress
dEpuivalentC von-Misea )StresB
册錨3星期三上午10:37
23.467Max 20.86 18.253 15.646 13.039 10.432 7.8256 5.2188 2.612 0.0051185 Min
进行了仿真计算,在大量参考国内外文献的同时结合 行业经验对行星排结构进行了强度校核,进一步保证 研发设计的可行性。
1电机模型及结构参数
1.1电机模型及方案 设计之初本团队结合永磁同步电机参数及行星
排电机总成输出参数,确定行星排的传动比为3,将 电机轴作为行星排的太阳轮输入,齿圈制动,框架输
出。通过行星排实现
减速增扭,更好地匹
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首先拿到模型可以看出这里是个行星轮结构。
在这里首先将三角形的齿轮架给刚化,因为整个分析中不考虑它的影响,主要考虑齿轮之间的作用。
然后我们就需要对模型添加约束和连接,主要包括有joints和frictionless contacts,添加完的效果如图。
添加过程请看下面详述。
首先添加三个类似的运动副,都是需要Body-Ground形式。
第一个添加太阳轮的旋转副。
revolute joint。
Body-ground。
再添加三角架的旋转副。
revolute joint。
Body-ground。
再添加内齿圈的固定副。
fixed joint。
Body-ground。
接着添加一个Body-Body的旋转副,也就是三角板与行星轮之间的旋转连接。
revolute。
Body-Boby。
最后就是两个齿轮之间的接触关系设置。
按照经验,在不考虑齿轮间摩擦的情况下,选择frictionless 接触类型。
之后,connections定义完全后,就可以对其进行网格划分。
网格划分这里完全采用Automatic不详述。
在之间添加了joints的基础之上,现在可以施加Joint load,这里我们取太阳轮为主动轮,添加一个Rotational Velocity的load。
最后,个人认为也是最关键的,就是对瞬态分析的参数(时间步)进行设置。
最后的最后,经过一个半小时的计算,得到计算结果。
帮帮帮帮帮。