Workbench心得——行星齿轮瞬态动力学分析
WORKBENCH中的动力学分析简介PPT课件
WORKBENCH中的 动力学分析简介
第九章
WORKBENCH中的动力学分析简介
第一节 ANSYS WorkBench概述 第二节 WorkBench中的模态分行 第三节 WorkBench中的谐响应分析
WORKBENCH中的动力学分析
第一节 ANSYS WORKBENCH概述
• 什么是 ANSYS Workbench?
Availability
x x x x
… 接触域
• 对于 ANSYS 专业licenses 和更高的licenses, 在模态分析中,存在更多 的接触选项:
• 对于粗糙和无摩擦的接触 , “Inter fac e Treatment ” 能被转变为 “Adjusted to Touch,” 这种方式将使接触面分别按照绑定和不分离 接触来进行处理. (假如这个选项被设置了,那么即使有间隙存在, 这 些部分也按照最初就已经接触上的情况来进行计算.)
• 关于预应力模态分析的内容,参见本节后面的部分B. 在这种情况下,只是为了体现预应力效果,载荷 才被考虑.
• 在模态分析中可以使用各种约束: • 假如没有或者只存在部分的约束, 刚体模态将能被检测和获得测评. 这些模态将处于0位置或者0HZ附 近. 与静态结构分析不同, 模态分析并不要求禁止刚体运动. • 边界条件对于模态分析来说,是很重要的。因为他们能影响部件的振型和固有频率. 因此需要仔细考 虑模型是如何被约束的.
… ANSYS WORKBENCH概述
Design Simulation 概述
• DS可以做的分析类型(续):
• 谐分析: • 计算结构在正弦激励下的响应.
• 线性屈曲: • 计算屈曲的失效载荷和安全系数及其屈曲形态.
行星齿轮传动系统的动力学建模与分析
行星齿轮传动系统的动力学建模与分析齿轮传动系统是一种常见的机械传动形式,由多个齿轮通过啮合传递动力。
在齿轮传动系统中,行星齿轮传动系统是一种常见的结构。
它由中央太阳齿轮、外圈行星齿轮和内圈行星齿轮组成。
行星齿轮传动系统具有紧凑结构、传动比变化范围广和承载能力强的特点,所以在很多机械传动系统中得到广泛应用。
了解行星齿轮传动系统的动力学特性对于设计和优化机械传动系统具有重要意义。
行星齿轮传动系统的动力学建模是研究其特性的基础。
一般而言,行星齿轮传动系统的动力学研究可以分为两个方面:传动系统的静态行为和传动系统的动态行为。
首先,我们来讨论行星齿轮传动系统的静态行为。
行星齿轮传动系统的静态行为主要包括传动比和齿轮位置分析。
传动比决定了输入轴和输出轴的转速比,对于不同的工况要求,传动比的变化范围也是需要考虑的因素。
齿轮位置分析是指确定各个齿轮之间的相对位置,这对于齿轮的啮合是否合理具有重要影响。
在行星齿轮传动系统的静态行为分析中,可以采用几何法和力学法相结合的方法,来求解传动比和齿轮位置。
几何法主要通过几何关系求解,力学法则涉及到力矩平衡和力平衡,求解过程需要考虑到齿轮的几何关系和曲柄等部件的力学特性。
其次,我们来讨论行星齿轮传动系统的动态行为。
行星齿轮传动系统的动态行为主要包括齿轮振动、齿轮动力学和齿轮传动系统的自激振动分析。
齿轮振动是指齿轮在运动过程中由于齿轮的不平衡、啮合刚度等因素引起的振动。
齿轮动力学是指齿轮在运动过程中由于齿轮的载荷和齿轮啮合行为引起的力学现象。
自激振动是指齿轮传动系统由于齿轮的不均匀磨损、齿轮啮合误差等因素引起的自激振动。
行星齿轮传动系统的动态行为分析需要采用系统动力学和振动理论等方法,通过建立数学模型来求解相应的动力学方程。
对于行星齿轮传动系统的动态行为分析,可以分为线性动力学分析和非线性动力学分析。
线性动力学分析是指在小扰动情况下对齿轮传动系统进行的分析,一般求解线性化的动力学方程来得到系统的频率响应和稳定性。
ansysworkbench瞬态动力学实例
在本文中,我将为您撰写一篇关于ANSYS Workbench瞬态动力学实例的文章。
我们将深入探讨ANSYS Workbench在瞬态动力学仿真方面的应用,从简单到复杂、由浅入深地讨论其原理和实践操作,并共享个人观点和理解。
第一部分:介绍ANSYS Workbench瞬态动力学仿真ANSYS Workbench是一种用于工程仿真的全面评台,包含了结构、流体、热传递、多物理场等多种仿真工具。
瞬态动力学仿真是ANSYS Workbench的重要应用之一,它能够模拟在时间和空间上随机变化的动力学过程,并对结构在外部力作用下的动力响应进行分析。
在瞬态动力学仿真中,ANSYS Workbench可以模拟诸如碰撞、冲击、振动等动态载荷下的结构响应,用于评估零部件的耐久性、振动特性、动态稳定性等重要工程问题。
通过对这些现象的模拟和分析,工程师可以更好地了解结构在实际工况下的性能,进而进行有效的设计优化和改进。
第二部分:实例分析为了更直观地展示ANSYS Workbench瞬态动力学仿真的应用,我们以汽车碰撞仿真为例进行分析。
假设我们需要评估汽车前部结构在碰撞事故中的动态响应,我们可以通过ANSYS Workbench建立汽车前部结构的有限元模型,并对其进行碰撞载荷下的瞬态动力学仿真。
我们需要构建汽车前部结构的有限元模型,包括车身、前保险杠、引擎盖等部件,并设定材料属性、连接方式等。
接下来,我们可以在仿真中引入具体的碰撞载荷,如40km/h车速下的正面碰撞载荷,并进行瞬态动力学仿真分析。
通过仿真结果,我们可以获取汽车前部结构在碰撞中的应力、应变分布,以及变形情况,从而评估其在碰撞事故中的性能表现。
第三部分:个人观点与总结通过以上实例分析,我们可以看到ANSYS Workbench瞬态动力学仿真在工程实践中的重要应用价值。
瞬态动力学仿真不仅能够帮助工程师分析结构在动态载荷下的响应,还可以为设计优化、安全评估等工程问题提供重要参考。
基于Workbench_的齿轮齿廓修形研究
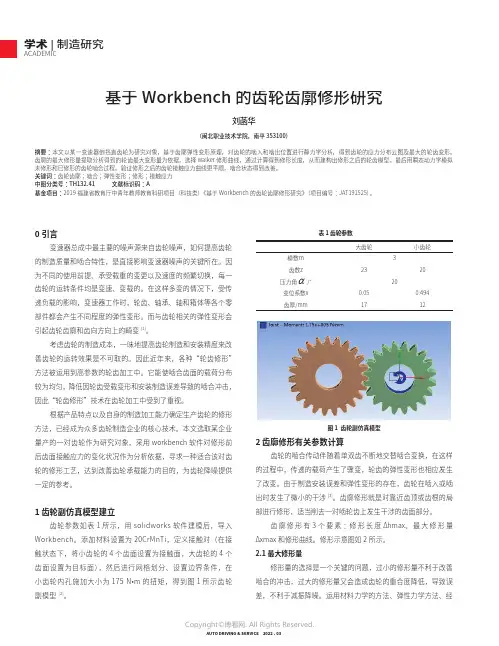
图1 齿轮副仿真模型图2 齿廓修形参数示意图验公式及有限元法,都可以确定轮齿的最大修形量。
有限元技术建立在弹性力学理论基础上,对具体的工况进行了分析,所得的结果是轮齿接触弯曲、剪切等各种变形的组合,能够准确反映齿轮的应力和变形状态。
本文对大小齿轮的齿顶分别修形,通过有限元提取啮入点和啮出点的变形量,与某一最大修形量经验公式进行对比,分析及过程如下。
图3a是齿轮刚啮入状态,小齿轮是主动轮,带动大齿轮运转。
“1”处为小齿轮某齿刚刚进入啮合时的状态,理想情况下是不存在变形的。
但实际啮合中,由于“2”和“3”处齿面接触弹性变形的影响,小齿轮在啮入的瞬间,大齿轮的齿顶与小齿轮的齿根位置发生少量干涉“Δ”,形成啮入时的冲击。
这个干涉量相当于大齿轮齿顶的修形量。
同理,如图3b所示,“4”处为小齿轮某齿退出啮合的瞬间,受到“1”、“2”和“3”处齿面接触弹性变形的影响。
小齿轮在2.2 齿廓修形曲线与修形长度本文选取walker修形曲线进行修形,修形曲线的方程如下。
式中 L——单双齿啮合区分界点到啮入点(或啮出点)的距离, 即为修形的长度X——啮合点的相对坐标,沿啮合线,原点在单双齿交替 点处Δ——距离为X时的修形量,Δmax为最大修形量建立修形齿轮渐开线模型(图5),用作图法求得齿轮的实际啮合线的长度B B=12.391,求得重合度ε=1.399,则修形长图3 齿轮啮合示意图图5 啮合点相对坐标计算示意图图4 变形量提取结果所以其中,αk为渐开线发生线与渐开线交点所对应的压力角。
图6 定义接触对图8 载荷设置图9 未修形的齿轮啮入、最大应力及啮出状态图10 修形后的齿轮啮入、最大应力及啮出状态图7 网格划分图11 修形前接触应力变化图图12 修形后接触应力变化图载荷和时间步的设置:在大小两个齿轮中心施加一个相对于地面的转动副,设置小齿轮为主动轮,在小齿轮上施加251.33 rad/s的转速,大齿轮上施加201.25 N•m的阻力矩(图8)。
workbench瞬态动力分析
Dx IT20 L 波长方向的长度 c 弹性波速 E 杨氏模量 E
质量密度
非线性响应
• 非线性响应
–全瞬态分析可包括任何非线性类型. – 更小的 ITS 通常有助于平衡迭代收敛. – 塑性、蠕变及摩擦等非线性本质上是非保守的,需 要精确地遵循载荷加载历程.小的 ITS 通常有助于精 确跟踪载荷历程. – 小的ITS可跟踪接触状态的变化.
– 模态叠加法 – 直接积分法
• 运动方程可以直接对时间按步积分。在每个时间点(time = 0, Dt , 2Dt, 3Dt,….) ,需求解一组联立的静态平衡方程 (F=ma);
– 需假定位移、速度和加速度是如何随时间而变化的, (积分方案选择) – 有多种不同的积分方案,如中心差分法,平均加速度 法, Houbolt, WilsonQ, Newmark 等.
积分时间步长
• 如何选择 ITS? • 推荐打开自动时间步长选项 (AUTOTS), 并设置 初始时间步长Dtinitial和最小时间步长Dtmin 、最 大时间步长Dtmax. ANSYS 会利用自动时间步长 功能来自动决定最佳时间步长Dt. • 例如: 如果AUTOTS 是打开的, 并且Dtinitial= 1 sec, Dtmin= 0.01 sec, and Dtmax= 10 sec; 那 ANSYS 起始采用 ITS= 1 sec ,并依据结构的响 应允许其在0.01 和 10 之间变动.
缩减/完整结构矩阵
• 求解时既可用缩减结构矩阵,也可用完整结构矩阵; • 缩减矩阵:
– 用于快速求解; – 不允许非线性因素存在 – 根据主自由度写出[K]、[C]和[M]等矩阵,主自由度是完全自由度 的子集; – 缩减的 [K] 是精确的,但缩减的 [C] 和 [M] 是近似的。
基于ANSYS Workbench的2K-H行星齿轮减速器行星轮系有限元分析
表 2 行星轮系的材料参数
零件 名称
材 料
弹性 模 量 /Pa
泊松 比
密 度/(Kg/m )
太 阳轮 行 星 轮
42CrM o
2.12x10
0.28
齿 圈
2.1.2 网格 划分 在进 行有 限 元分 析计 算前 .必 须对 行 星轮 系装 配模 型 进行 网格 划 分 ,它 的好 坏 直接 关 系到求解 的准确度及速度.为了提高计算效率 ,并根据计算机硬件配置情况 ,本文选用 SOLIDI87单元. 在 ANSYS Workbench中行星轮系装配模型采用 自由网格划分的方法 ,实际就是在四面体 和扫掠型划 分 之 间 自动切换 ,在划分过程 中设置 “Relevance Center”为 “Fine”,细化 网格 ,最后划分 的节点数为 267 654, 单元 数为 139 631.划分 网格 后 的有 限元模 型如 图 2(a)所示 . 2.】.3 定 义边界 条件 模 型导人 ANSYS Workbench软件后 ,系统将 自动为行 星轮 系传 动装 配模 型增 加接 触关系 ,对一般的静力学接触 问题分析 ,只需确定其他约束关系和载荷 ,即可进行静态求解 .在三个行 星 齿轮轴颈 、太 阳轮轴颈处施加 圆柱面约束 以模拟轴承支承 ,切线方 向设定为“自由”,在齿圈的外圈添加 固定约束.根据行星轮系]二作要求 ,在太 阳轮(动力输入轴 )轴颈处加载转矩 1.8x10 N·mm,加载后的有 限元 模 型如 图 2(b)所示 .在 静力 学分 析设 置 选项 中 ,设 置 “Large Deflection”为 “on”,激 活 大变 形 ,然 后 进 行 求解 .
收稿 日期 :2016—04—06 作者简介 :王彦军(1977一),男 ,讲师 .E—mail:wyj2004716@163.tom 基金项 目:宁德职业技术学院育苗基金项 目(zR20l3YM04).
基于Workbench的行星齿轮组热-结构耦合分析
齿 轮胶合或 点蚀失效 。查阅当前文献 发现 国内外 的学者对
热分析方法、温度场在啮合齿轮 内部 的分布 以及对流换
热 、热 传导等 热边 界条件 的确 定都进行 了研 究 。热对 齿轮传 动过程 中的应 力有很大影 响,但现有研 究大多将应 力 和温度 单 独 进行研 究 ,研 究 结果 实 际并不 能 很好 地模
0 引言
行星 齿轮 组 是汽 车减 速箱 关 键零 部件 之 一 ,其传 动
场 常用 的 两种 方法 是 直接 耦合 和顺 序 耦合 ,直接 耦 合是
直 接 用 热一 应 力 耦 合单 元 ,得 到 热 分析 和 结 构 应 力分 析
性 能直接 影 响着 汽车 减速 箱 的工 作性 能 , 由于汽 车行 驶 过 程 中调 速频 繁 ,齿 轮 收到 的扭 矩强 度大 ,因而 行星 齿 轮 组 传动 故 障也 是汽 车 多发 故障 之一 。现 有研 究 多集 中
件 研究 提供 理论 依据 和更 加准 确 的研 究方 法 。
齿面 的粗 糙度 、润滑 油的动力粘度 ,齿轮的表面温Βιβλιοθήκη 等影 1 热力耦合方法
结构 在承 受变 化 的温 度载 荷 时 , 由于 部 分约 束而 使 变 形 受到 限制 ,就会 在 内部产 生 热应 力 。热 应力 实 际上 是 热 和 应 力 两个 物 理 场 的耦 合 , 目前 A N S Y S 研 究 耦 合
基于Wo r k b e n c h 的行 星齿轮组热一 结构耦合分析
co upl i n g an al y s i s f o r p l an et ar y g ear s et b as ed on AN SYS W or kb enc h
基于ANSYS Workbench的风电行星齿轮特性分析
李红 丽 - . , 徐 刚 1 , 2 , 梅华平 , 刘 丽华 , 肖淑 芬 , 李 涛 。
( 1 . 湖北工程学院机械工程学院 , 湖北孝感 摘 4 3 2 0 0 0 ; 2 . 武汉理工大学信 息工程 学院, 湖北武汉 4 3 0 0 7 0 )
分 析 研 究静 态受 力 下 的 接 触 应 力和 变形 。 分 析 结 果 对 齿轮 齿根 应 力监 测 有 良好 的 指 导 意 义 关键 词 : 行星齿轮 ; 静/ , J 学; 齿根 应 ; 有 限 兀 分析 中 图分 类 号 : H1 3 2 . 4 2 5 文献标识码 : B
i n n l 。 所 建 模 如 图 1
所示 , 街罔 固定 , 人 轮 为主动 轮 , 行 星 轮 数
皱 3个
图 1 行 星 齿 轮 结构
2 行 星 齿 轮 静 力学 分 析
2 . 1 理 论 分 析
行譬 齿轮机构一般采用直齿 圆柱齿轮 , 对于直齿轮 而 ^ ‘ , 主动 轮所传递 的扭矩 没为 T ,则 ’ j 之棚啮合 的轮 齿将受 到沿 着啮合
必要对行星轮系进行传动特件分析 。 。 埘行星直 齿轮系啮合进行受力分析并计算齿根应力。以某
型 号风 电 齿 轮 箱 行 星 齿 轮 机 构 为 例 , 建 市行 星齿 轮 模 型 , 利用 有 限 元 分 析 研 究 其 静 态 受 力 下 的 接 触 力和 变 形 。 1 行 星 齿 轮 几 何 模 型 建 立 行星齿轮其实就是多个齿轮组成的齿轮系 , 包 括 有 人 阳轮 、
要: 以行 星齿轮 齿根 应力监 测为需求背景, 根 据力学理论 分析齿轮啮合过程 中的受力情况, 计算齿根 处的弯曲应 力; 利用有限元
行星轮减速器瞬态动力学分析与故障诊断
188研究与探索Research and Exploration ·智能检测与诊断中国设备工程 2023.12(下)1 前言随着我国制造业的不断发展,越来越多的大型、重型、智能型设备被运用于各个行业,设备越大,其越需要大扭矩进行驱动,行星齿轮以其较小的体积、超高的传动比以及防止回转性等优点,被运用于采煤机、水力发电机、舰船、坦克等民用和军用装备中。
无论是煤矿开采过程中重型设备的搬运,还是矿产资源的远距离运输都会遇到各种复杂的路况,均会导致变速装置中的斜齿行星轮啮合轮齿受到严重的冲击,降低行星轮变速器的使用寿命。
齿轮在使用过程中受到冲击不仅会影响行星齿轮机构的动态性能,还会引起行星齿轮系统的振动导致其产生噪声加快系统的损坏,因此,分析齿轮传动过程中的力学性能,对行星齿轮系统进行优化设计、强度校核、噪声控制以及故障诊断均具有重大工程意义。
长时间处于高速、重载的工况条件下运行的行星轮减速器经常会出现齿面点蚀、磨损、胶合和剥落等故障。
随着人们对深度学习理论研究的不断成熟,促使故障诊基金项目:河北省重大科技成果转化专项(22293601Z)。
行星轮减速器瞬态动力学分析与故障诊断王伟,池耀磊,魏培雨,受中秋(河北金融学院,河北 保定 071051)摘要:基于斜齿轮的渐开线方程利用Solidworks 构建斜齿行星轮减速器的立体模型图,并引入ANSYS Workbench 软件中,根据斜齿行星轮系的载荷特点,利用Trancient Structura 瞬态接触分析模块,完成动态特性的仿真研究,获得斜齿行星轮系动态接触区域的应力集中点。
由于啮合传动造成应力集中点不同程度的破坏,模拟出不同的故障损伤情况,并利用卷积神经网络对不同损伤情况做出故障诊断。
本研究对保持斜行星齿轮系的平稳运行具有重大的安全意义。
关键词:行星轮;仿真;故障诊断;神经网络;Ansys中图分类号:TH132.46 文献标识码:A 文章编号:1671-0711(2023)12(下)-0188-03断的方法普遍用于机械、建筑、医疗、采矿等各个行业中。
基于Ansys Workbench的齿轮轴有限元分析
引言摆线针轮行星传动属于K-H-V 行星齿轮传动,与普通的齿轮传动相比,摆线针轮行星传动具有以下主要特点:传动比范围大,单级传动比为6~119,两级传动比为121~7569,三级传动比可达6585030;结构紧凑、体积小、质量轻。
摆线针轮行星传动采用了行星传动结构和紧凑的输出机构,因而结构紧凑,与相同功率的普通齿轮传动相比,体积和质量均可减少1/2~1/3;运转平稳,噪声低;在摆线针轮行星传动过程中,摆线行星轮与针轮啮合齿数较多,且摆线行星轮与针轮的啮合、输出机构的销轴与行星轮端面的销轴孔及行星轮与偏心套之间的接触都是相对滚动,因而运转平稳、噪声低;传动效率高,除了针轮的针齿销支承部分外,其他部件均为滚动轴承支承,同时针齿套的使用使得针轮与摆线行星轮的啮合由滑动摩擦变为滚动摩擦。
因而,摆线针轮行星齿轮传动机构同一般的减速机构相比有更高的传动效率。
一般单级传动效率为90%~95%。
齿轮轴是传动的薄弱环节,限制了高速轴的转速和传递的功率。
减速器系统强度取决于减速器内部各个零件的强度,它们直接决定了减速器的使用寿命,因而各零件具有合理的强度是十分重要的。
国内外许多专家学者对减速器的强度分析作了深入的研究,常用的方法有解析法、试验法和有限元法。
张迎辉等利用MATLAB 软件分析计算得出行星架的支承刚度和曲轴的弯曲刚度对固有频率的影响明显[1]。
张迎辉等分析了机器人用RV 减速器中支承轴承刚度及曲轴和齿轮之间角度周期性变化的影响,并对轴承刚度的灵敏度进行了分析,提出了避免共振和保持精度的方法[2]。
在风电变桨减速器零部件设计过程中需要考虑零部件的传动可靠性、安装合理性,而齿轮轴作为传动的关键零件,在实际应用中至关重要,该零件也容易造成磨损,所以对其进行强度分析就显得尤为重要。
此外,对于轴这些传递动力的零件应在满足强度要求的前提下,使其尺寸尽量小、寿命尽量长。
1齿轮轴的设计因轴为齿轮轴,材料与行星齿轮的相同,故选用20CrMnTi ,渗碳淬火、回火处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首先拿到模型可以看出这里是个行星轮结构。
在这里首先将三角形的齿轮架给刚化,因为整个分析中不考虑它的影响,主要考虑齿轮之间的作用。
然后我们就需要对模型添加约束和连接,主要包括有joints和frictionless contacts,添加完的效果如图。
添加过程请看下面详述。
首先添加三个类似的运动副,都是需要Body-Ground形式。
第一个添加太阳轮的旋转副。
revolute joint。
Body-ground。
再添加三角架的旋转副。
revolute joint。
Body-ground。
再添加内齿圈的固定副。
fixed joint。
Body-ground。
接着添加一个Body-Body的旋转副,也就是三角板与行星轮之间的旋转连接。
revolute。
Body-Boby。
最后就是两个齿轮之间的接触关系设置。
按照经验,在不考虑齿轮间摩擦的情况下,选择frictionless 接触类型。
之后,connections定义完全后,就可以对其进行网格划分。
网格划分这里完全采用Automatic不详述。
在之间添加了joints的基础之上,现在可以施加Joint load,这里我们取太阳轮为主动轮,添加一个Rotational Velocity的load。
最后,个人认为也是最关键的,就是对瞬态分析的参数(时间步)进行设置。
最后的最后,经过一个半小时的计算,得到计算结果。
帮帮帮帮帮。