电子水准仪 i角检验实验报告
水准仪I角测量实习成果及评价

水准仪I角测量实习成果及评价
1、我学到了很多实实在在的东西,比如对仪器的操作更加熟练,学会了地形图的绘制和碎部的测量等课堂上无法做到的东西,很大程度上提高了动手和动脑的能力,同时也拓展了与同学的交际、合作的能力。
2、一次测量实习要完整的做完,单单靠一个人的力量和构思是远远不够的,只有小组的合作和团结才能让实习快速而高效的完成。
3、不仅理解了基本测绘工作的全过程,系统的掌握测量仪器操作、实测、计算、地图绘制等基本技能,而且为以后的工作打下基础。
4、还使实际工作能力得到锻炼。
培养了踏时求是的工作作风、吃苦耐劳的献身精神、团结协作的集体精神。
5、对以前零零碎碎学的测量知识有了综合应用的机会,很好的巩固了理论教学知识,提高实际操作能力,同时也拓展了与同学之间的交际合作的能力。
水准仪i角检验方法
水准仪i角检验方法在平坦的地面上选定相距60~100米的A,B两点,立水准尺。
先将水准仪安置于A,B的中点C,精平仪器后分别读取A,B点上水准尺的读数a1,b1;改变水准仪高度(10cm以上)再重读两尺读数a1′,b1′。
前后两次分别计算高差,高差之差如果不大于5mm,则取其平均数,作为A,B两点间不受i角影响的正确高差:h1=1/2〔(a1-b1)+ (a1′-b1′)〕将水准仪搬到与B点相距2m处,精平仪器后分别读取A,B两点水准尺读数a2,b2,又测得高差h2= a2-b2.如果h1=h2则说明水准管轴平行于视准轴,否则,A尺上应有读数a2′及水准管轴与视准轴的交角(视线的倾角)i角a′2= h1+ b2 i=ρ″∣a2- a2′∣/DAB ρ=206264.806″≈206265″DAB为A,B间距离对于DS3级水准仪,当i角>20″时,需要进行水准管轴平行于视准轴的校正。
圆心角的弧度为该角所对弧长与半径之比。
把弧长b等于半径R的圆弧所对圆心角称为一ρ个弧度。
以ρ表示,因此,整个圆周为2兀弧度。
弧度与角度的关系为2兀=360°,ρ=180°/兀一个弧度所相当的度分秒制角值为ρ°=180°/兀=57.2957795°≈57.3°ρ′=60*180°兀=3437.74677′≈3438′ρ″=3600*180°/兀=206264.806″≈206265″水准仪i角检验报告i角的归零程度在很大程度上影响着水准仪观测值的精确度,因此,在水准仪各项指标的检验中,i角的检验是一个重头戏。
110502小组成员深知i角的重要性,对i角作了细致的检验,下面本组就在本次i角检验过程中使用的方法、观测到的数据、检验的结果和结论说一下我们自己的看法和认识。
○1检验方法:本组采用了方便、简洁、较准确的i角检验方法。
检验方法及图解如下:首先在较平坦的地方选定适当距离的两个点A、B,摆上尺垫。
电子水准仪i角检验实验报告
电子水准仪i角检验实验报告电子i角检验实验报告一、实验目的通过对BOIF产DAL数字电子水准仪的电子i角校正试验的实践,加深对数字电子水准仪的电子i角的理解,掌握电子i角的校正测试原理方法,领会i角作为未知量参与平差的方法与意义。
二、实验实施DAL1528R数字电子水准仪一台,脚架一副,配套通讯电缆一根,装备有配套软件的计算机一台或计算器一部、配套条码标尺2支、相距80米的水准点和尺垫2个。
三、实验操作1、电子i角的校正:在相距约40~60米的两水准点A、B分别架设标尺,在标尺间选出一位置1架设仪器,仪器开机选定功能菜单的电子i角校正功能(中文版提示为“9.电i校正”,英文版提示为“iCAL”),按照提示分别照准标尺A、B进行测量;然后仪器向某标尺方向移动约15米架设整平仪器,再按提示分别照准标尺A、B进行测量,仪器完成校正计算后将自动关机。
2、电子i角的检验:在相距约80米的两个水准点上分别架设条码标尺,讲仪器分别架设于两标尺之间大约20米、30米、40米、50米、60米处、读取两个标尺的高度和视距。
根据公式计算出i角的测试结果。
四、实验报告一、线路号A尺读数B尺读数高差△Hi视距差△Di△Di*△Hi△Di*△Di Hai Dai Hbi Dbi1 1.2089 34.18 1.2216 74.16 0.0127 39.980 0.5077 1598 .4002 1.1949 41.95 1.2091 65.92 0.0142 23.970 0.3404 574. 5613 1.1906 51.29 1.2113 56.58 0.0153 5.290 0.0809 27.9 8414 1.2591 63.87 1.2773 44.17 0.0182 -19.700 -0.3585 388.0905 1.2415 72.81 1.2605 35.40 0.0189 -37.410 -0.7070 1399 .508∑△Hi= 0.07930 ∑△Di=12.130∑△Hi*△Di=-0.1365 ∑△Di*△Di=3988.544∑△Hi*△Hi= 0.0013h=0.0161 I=-17.136∑vi*vi=-1.1354e-005m0= 0.00195 Qhh= 0.2015 QII= 2.5258e-004mh=8.7323e-004 mi=6.3773二、路线j △Hj △Dj1 0.0127 39.9802 0.0142 23.9703 0.0153 5.2904 0.0182 -19.7005 0.0189 -37.410环路△Hi △Di △Di*△Hi△Di*△Di△Hi*△Hi1—2 0.0015 -16.01 -0.02402256.32010.00000225 1—3 0.0026 -34.69 -0.090191203.3960.00000676 1—4 0.0055 -59.68 -0.328243561.7020.00003025 1—5 0.0062 -77.39 -0.479825989.2120.00003844 2—3 0.0011 -18.68 -0.02055348.94240.00000121 2—4 0.0040 -43.67 -0.174681907.0690.00001600 2—5 0.0047 -61.38 -0.288493767.5040.00002209 3—4 0.0029 -24.99 -0.07247624.50010.00000841 3—5 0.0036 -43.70 -0.157321909.690.00001296 4—5 0.0007 -17.71 -0.0124313.64410.00000049∑△Di*△Hi -1.64817∑△Di*△Di 19881.98∑△Hi*△Hi 0.00013886I -17.0989∑Vi*Vi -28.1789m0 1.769mi 2587.82小结:从实验结果来看,I=-17.136有点偏大,在测量(操作无误)无误的情况下(同组人员测量的I角都为17″左右),说明该仪器确实存在较大的i角,再联系每次整平后,旋转180°水准泡严重发生偏离中心位置,说明该仪器本身存在较大的误差,可能是长期没有经过校准的缘故。
数字水准仪i角检校方法对比研究
15 科技创新导报 Science and Technology Innovation Herald研 究 报 告2010 NO.13Science and Technology Innovation Herald科技创新导报前言随着测绘仪器制造技术的飞速发展,数字水准仪的普及率愈来愈高。
数字水准仪具有测量速度快,读数记录客观,精度高,操作简单,易于实现内外业一体化等特点, 具有比光学水准仪更多的优点和技术发展空间,代表了水准仪的发展方向。
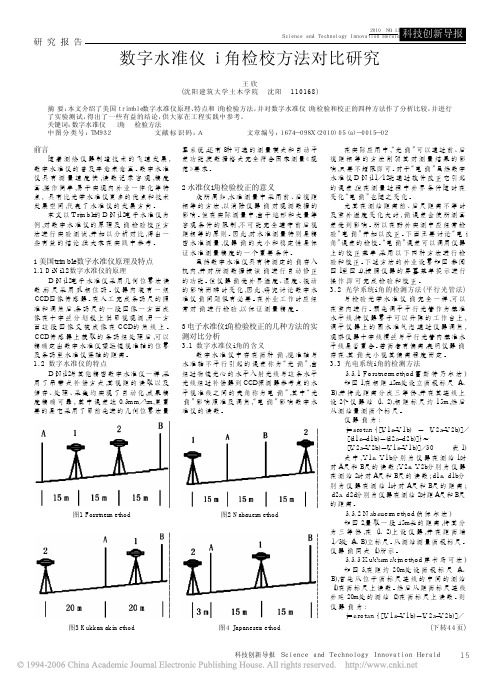
本文以Trimble的DiNi12电子水准仪为例,对数字水准仪的原理及i角检验校正方法进行实验测试,并加以分析对比,得出一些有益的结论,供大家在实践中参考。
1 美国trimble 数字水准仪原理及特点1.1DiNi12数字水准仪的原理DiNi12电子水准仪采用几何位置法读数,标尺采用双相位码。
仪器内装有一组CCD图像传感器。
在人工完成条码尺的照准和调焦后,条码尺的一段图像一方面成像在十字丝分划板上供目视观测,另一方面这段图像又被成像在CCD的焦线上。
CCD传感器上获取的条码经处理后,可以精确定出数字水准仪望远镜视准轴的位置及条码至水准仪竖轴的距离。
1.2数字水准仪的特点DiNi12与其他精密数字水准仪一样,采用了吊带式补偿方式,其视距的读取以及储存、处理、采集均实现了自动化,成果精度精确可靠,(其中误差达0.3mm/km,更重要的是它采用了目前先进的几何位置法量算系统,还有8种可选的测量模式和自动平差功能,使数据格式完全符合国家测量《规范》要求。
2 水准仪i 角检验校正的意义众所周知,水准测量中采用前、后视距相等的方法,以消除仪器i角对观测数据的影响。
但在实际测量中,由于地形和丈量等客观条件的限制,不可能完全遵守前后视距相等的原则。
因此,对水准测量特别是精密水准测量,仪器i角的大小和稳定性是保证水准测量精度的一个重要条件。
虽然数字水准仪具有将测定的i角存入机内,并对所测数据按该i角进行自动修正的功能。
水准仪的检验与校正实验报告(共5则)
水准仪的检验与校正实验报告(共5则)第一篇: 水准仪的检验与校正实验报告水准仪的检验与校正实验报告一、实验目的与要求:1.弄清水准仪的主要轴线及它们之间应满足的几何关系;2.掌握DS3水准仪检验与校正的方法。
二、设备:DS3水准仪1台, 水准尺2根, 尺垫2个, 小螺丝刀1把, 校正针1根, 记录板1块。
三、方法与步骤:1.一般性检验:安置仪器后, 首先检验:三脚架是否牢固, 制动和微动螺旋、微倾螺旋、对光螺旋等是否有效, 望远镜成像是否清晰等, 同时了解水准仪各主要轴线及其相互关系。
2.圆水准器轴平行于仪器竖轴的检验与校正:检验:转动脚螺旋使圆水准器气泡居中, 将仪器绕竖轴旋转180°后, 若气泡仍居中, 则说明圆水准器轴平行于仪器竖轴, 否则需要校正。
校正:先稍松圆水准器底部中央的固紧螺丝, 再拨动圆水准器的校正螺丝, 使气泡返回偏离量的一半, 然后再转动脚螺旋使气泡居中。
如此反复检校, 直到圆水准器在任何位置时, 气泡都在刻划圈内为止, 最后旋紧固紧螺旋。
3.十字丝横丝垂直于仪器竖轴的检验与校正:检验:以十字丝横丝一端瞄准约20m处的一细小目标点, 转动水平微动螺旋, 若横丝始终不离开目标点, 则说明十字丝横丝垂直于仪器竖轴, 否则需要校正。
校正:旋下十字丝分划板护罩, 用小螺丝刀松开十字丝分划板的固定螺丝, 微略转动十字丝分划板, 使转动水平微动螺旋时横丝不离开目标点。
如此反复检校, 直至满足要求。
最后将固定螺丝旋紧, 并旋上护罩。
4.水准管轴与视准轴平行关系的检验与校正:检验: 在平坦地面上选定相距60-80米的A.B两点, 放下尺垫立水准尺。
现在距A.B等距离处安置水准仪, 分别读取A.B两点水准尺读数a1.b1, 求得正确高差Hab(b1(a1。
再在A点附近2-3米处水准仪, 分别读取A.B两点水准尺读数a2.b2, 求得B尺的上的应有读数b2(a2(Hab。
若b2=b2'时, 说明水准管轴与视准轴平行;若b2(b2'时, 说明水准管轴与视准轴不平行。
电子水准测量实习报告

实习报告实习时间:2023年2月24日至2023年3月2日实习地点:XX公司测量实验室一、实习目的和任务本次实习的主要目的是通过电子水准测量实践,掌握电子水准仪的使用方法、测量原理以及数据处理方法。
实习任务包括:1. 熟悉电子水准仪的基本构造和功能;2. 学会使用电子水准仪进行水准测量;3. 掌握电子水准测量数据处理方法;4. 能够独立完成电子水准测量任务。
二、实习过程1. 电子水准仪的认识与使用在实习开始时,导师首先向我们介绍了电子水准仪的基本构造和功能。
电子水准仪是一种高精度的测量仪器,主要由电子水准仪主机、测量绳、转轴、尺垫等部件组成。
它通过测量绳上的电子传感器来测量高差,具有快速、准确、方便等特点。
在导师的指导下,我们学会了如何正确使用电子水准仪。
首先,将电子水准仪主机放置在水平的测点上,调整水平仪气泡至中间位置。
然后,将测量绳穿过转轴,并将绳子两端分别固定在待测点上。
接下来,启动电子水准仪,将仪器对准测量绳,即可显示待测点的高程。
2. 电子水准测量在掌握了电子水准仪的基本使用方法后,我们开始进行电子水准测量。
首先,我们在实验室内进行了简单的水平面测量,以熟悉测量过程。
在测量过程中,我们注意观察电子水准仪的显示屏幕,确保测量数据的准确性。
随后,我们来到了室外实地进行水准测量。
在实地测量过程中,我们遇到了一些困难,如地形起伏、风力较大等。
我们学会了如何应对这些困难,如选择合适的测点、固定测量绳、减少风力影响等。
通过不断的实践,我们逐渐提高了测量效率和准确性。
3. 数据处理与检核在完成电子水准测量后,我们需要对测量数据进行处理和检核。
电子水准仪可以直接将测量数据传输到计算机,利用相关软件进行数据处理。
我们学会了如何将数据导入软件、如何进行高程差的计算、如何检查测量数据的准确性等。
通过对测量数据的处理和检核,我们发现了一些问题,如数据传输错误、测量误差等。
我们学会了如何解决这些问题,如重新测量、修正数据等。
实验三 水准仪的i角检验

《土木工程测量》课程实验报告实验编号:实验内容:年级专业:组别:组长:学号:组员:学号:任课教师:报告时间:年月日实验三水准仪的i检验一、实验目的1.了解DS3水准仪各轴线应满足的条件。
2.掌握水准仪i检验方法(i角值超过20″时,需校正),了解其校正方法。
二、实验设备、人员、学时1.设备:每组1台DS3水准仪(附脚架),水准尺2杆,尺垫2个,(记录板1块)。
2.人员:每组5人。
3.学时:课内学时1学时+课外学时1学时=2学时。
三、实验内容设计1.检验目的使长水准管轴平行于视准轴。
2.检验方法选取相距约60—80m的A、B两点,各打一木桩,竖立水准尺,先将水准仪安置在离两点等距离处,认为所测得的两点的高差h AB是正确的。
再将水准仪搬到离B点约3~5m处,先读取近尺读数b2,由于仪器距B点很近,可将b2近似地看作视线水平时的读数b′2,由此计算出视线水平时远尺读数a′2=b′2+ h AB。
如果远尺的实际读数不是a′2,而是a2,说明水准管轴不平行于视准轴,需要校正。
3.校正方法转动微倾螺旋,使远尺读数从a2调到a′2。
此时视准轴水平了,但气泡不居中了。
拨动水准管一端的上下两个校正螺丝,先松后紧,使水准管气泡居中,此时水准管轴也在水平位置,于是水准管与视准轴就平行了。
此项工作要反复进行几次,直至检验远尺的读数与计算值之差不大于3~5mm为止。
四、注意事项第一步一定要将仪器安置在AB两点的中间位置,要用钢尺量取,确定安置仪器的点位。
五、应交资料水准仪i角检验略图和说明。
电子水准仪i角检验校正
数字水准仪i角检验校正i角的产生:水准仪产生i角变化的原因是仪器本身的结构与外业工作条件的变化而至,仪器中的十字丝是固定在上下的V形槽中,下面的V形槽由弹簧支撑着,上面是一个压紧调节螺丝。
由于内部与外界环境条件的变化,如温度、湿度、震动的变化它会产生i角微小的变化;或者,由于其它内应力的变化而产生不同程度的变化也是不足为奇的。
实际测试分析与结论1、四中方法均是把检验和校正结合为一体,经实际测试,检验之后仪器可自动完成校正,使i角达到允许的范围内,符合国家水准测量规范要求。
2、四种犯法的对比分析(1)四种方法的基本原理相同,都是立两个水准尺,把水准仪不仅安置在两个水准尺的中间处,而且安置在距两个水准尺距离不同的地方,所以所测得到的两个立尺点之间的高差会受到i角的影响,这样一来,就可以利用仪器的两个不同位置所测得到两个立尺点之间的高差不同,求出i角的大小。
(2)采用三种不同方法时,两次安置水准仪时,水准仪的移动距离不同,参见表1。
(3)采用四种不同方法时,水准仪和水准尺之间的相对位置不同,参见表2。
3、水准仪i角的允许误差水准仪i角允许误差的概念应该说有三方面的涵义,也是三种情况下的不同要求;出厂时工厂调校的允许误差、用户调校时的允许误差、测量等级或规定所要求的允许误差。
如莱卡NA2 i角的允许误差:(1)出厂调校为:±8″,(2)用户调校为:±20″,但是根据我国国家水准测量规范和工程测量规范的要求,用于一、二等水准测量的水准仪,仪器的i角不应超过15″,所以在进行沉降观测过程中,施工单位必须每月进行i角检验,并保证i角必须调校在15″以内表1 两次安置水准仪时,水准仪的移动距离表2 四种不同方法对水准仪和水准尺的相对位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子i角检验实验报告
一、实验目的
通过对BOIF产DAL数字电子水准仪的电子i角校正试验的实践,加深对数字电子水准仪的电子i角的理解,掌握电子i角的校正测试原理方法,领会i角作为未知量参与平差的方法与意义。
二、实验实施
DAL1528R数字电子水准仪一台,脚架一副,配套通讯电缆一根,装备有配套软件的计算机一台或计算器一部、配套条码标尺2支、相距80米的水准点和尺垫2个。
三、实验操作
1、电子i角的校正:在相距约40~60米的两水准点A、B分别架设标尺,在标尺间选
出一位置1架设仪器,仪器开机选定功能菜单的电子i角校正功能(中文版提示为
“9.电i校正”,英文版提示为“iCAL”),按照提示分别照准标尺A、B进行测量;
然后仪器向某标尺方向移动约15米架设整平仪器,再按提示分别照准标尺A、B
进行测量,仪器完成校正计算后将自动关机。
2、电子i角的检验:在相距约80米的两个水准点上分别架设条码标尺,讲仪器分别架
设于两标尺之间大约20米、30米、40米、50米、60米处、读取两个标尺的高度
和视距。
根据公式计算出i角的测试结果。
四、实验报告
一、
线路号
A尺读数B尺读数
高差
△Hi
视距差
△Di
△Di*△
Hi
△
Di*
△Di Hai Dai Hbi Dbi
1 1.2089 34.18 1.2216 74.16 0.0127 39.980 0.5077 1598 .400
2 1.1949 41.95 1.2091 65.92 0.0142 23.970 0.3404 574. 561
3 1.1906 51.29 1.2113 56.58 0.0153 5.290 0.0809 27.9 841
4 1.2591 63.87 1.2773 44.17 0.0182 -19.700 -0.358
5 388.
090
5 1.2415 72.81 1.2605 35.40 0.0189 -37.410 -0.7070 1399 .508
∑△Hi= 0.07930 ∑△Di=12.130
∑△Hi*△Di=-0.1365 ∑△Di*△Di=3988.544
∑△Hi*△Hi= 0.0013
h=0.0161 I=-17.136
∑vi*vi=-1.1354e-005
m0= 0.00195 Qhh= 0.2015 QII= 2.5258e-004
mh=8.7323e-004 mi=6.3773
二、
路线j △Hj △Dj
1 0.0127 39.980
2 0.0142 23.970
3 0.0153 5.290
4 0.0182 -19.700
5 0.0189 -37.410
环路△Hi △Di △Di*△
Hi
△Di*△
Di
△Hi*△
Hi
1—2 0.0015 -16.01 -0.02402256.32010.00000225 1—3 0.0026 -34.69 -0.090191203.3960.00000676 1—4 0.0055 -59.68 -0.328243561.7020.00003025 1—5 0.0062 -77.39 -0.479825989.2120.00003844 2—3 0.0011 -18.68 -0.02055348.94240.00000121 2—4 0.0040 -43.67 -0.174681907.0690.00001600 2—5 0.0047 -61.38 -0.288493767.5040.00002209 3—4 0.0029 -24.99 -0.07247624.50010.00000841 3—5 0.0036 -43.70 -0.157321909.690.00001296 4—5 0.0007 -17.71 -0.0124313.64410.00000049∑△Di*△Hi -1.64817
∑△Di*△Di 19881.98
∑△Hi*△Hi 0.00013886
I -17.0989
∑Vi*Vi -28.1789
m0 1.769
mi 2587.82
小结:从实验结果来看,I=-17.136有点偏大,在测量(操作无误)无误的情况下(同组人员测量的I角都为17″左右),说明该仪器确实存在较大的i角,再联系每次整平后,旋转180°水准泡严重发生偏离中心位置,说明该仪器本身存在较大的误差,可能是长期没有经过校准的缘故。
另外前后两次测量mi相差过大,其可能原因是本身i角偏大,而第二种方法仅适用于i角较小的情况,对过大i角的计算涵盖不了既造成了最后不一致的情况。
五、实验总结
通过实验对i角的理解的理解进一步加深,i角是望远镜视准轴与水平轴之间的夹角,由于存在夹角,夹角乘以观测距离就有一个高差误差产生,而观测采取后视加前视的方法,在一定程度上会消除或者削弱这个误差值,在理想情况下,即就是后视距离等于前视距离时,i角的影响为零,但是我们在实际操作中完全不可能保证此条件,所以我们可以采取以下几种措施,来尽量减小误差:在仪器制作中,尽量使得i角比较小,通过计算其值来削弱其影响;尽量使前后视距相等,它们的差值在累计相差范围内,利于计算。
对实验结果的说明,从实验结果来看,I=-17.136有点偏大,在测量(操作无误)无误的情况下(同组人员测量的I角都为17″左右),说明该仪器确实存在较大的i角,再联系每次整平后,旋转180°水准泡发生偏离说明,该仪器本身存在较大的误差,可能是长期没有经过校准的缘故。
另外前后两次测量mi相差过大,其可能原因是本身i 角偏大,而第二种方法仅适用于i角较小的情况,既造成了最后不一致的情况。
测量结束后,我们还进行了进一步比较,在两标尺之间观测了两组值,两站较为接近后视尺,其中后视都为零,则前视结果即就是它们的高差值,发现两次高差相差有3mm,及说明了i的存在,影响了高差结果。
与此同时,我们还在两尺中间选择了两站测量,发现两次高差值减小到2mm,说明前后视距相等对削弱i角影响的作用。