轮机自动化习题答案
轮机自动化基础前五章课后题答案(武理工)

• 5-5 已知二阶系统如下图所示,为使系统的最大 超调量为5%,过渡过程时间为4s,试确定其 及 • 的值 。 • 解:该系统的闭环传递函数为:
n
2 n ( s ) 2 2 s 2n s n
• 由题可知该系统为欠阻尼状态,则 •
max % e
1 2
100 % 5%
• 解得
R(s) + -
2 n ss 2n
Y(s)
2
n n
9 9
2
0.6 9
3 3 1.09 t s 0.69 4 4 4 1.45 t s 069 4
5% 2%
• 算出e1=0.1 • 2、扰动信号下的静态误差,令r(t)=0,闭环传递 2 函数为 s s 1 s 2 100.4 s 1 1 ss 1 s2
• 扰动F(s)=1/s
e lim ss F s因为系统为单位反馈,所以
ef e
• 总静差为
f
e e1 e f 0.1
被控对象:水箱;给定值:设定的水位或者相对应的电位计电位; 被控量:水位;扰动量:出水流量Q2;控制器:电位计; 执行器:电动机和控制器。
1.已知
F (s)
4 s2 s 4
,求 f (t )
2-9求图中所示系统方块图的传递函数。
解:原图可可等效为
削去中间变量,得到该图的传递函数为:
• 5-9 试用劳斯判据确定使下图所示系统稳定的K 值范围。
R(s) + -
K ss 1s 2
Y(s)
• 解:系统的闭环传递函数为:
Gs K ss 1s 2 K 3 1 K ss 1s 2 s 3s 2 2s K
轮机自动化基础(本科)-选择题复习题

1、对于自动控制系统,最不利的扰动形式是________________。
A。
阶跃输入B。
速度输入C。
加速度输入 D. 脉冲输入2、在反馈控制系统中,为了达到消除静态偏差的目的,必须选用__________。
A. 正反馈B。
负反馈C. 在偏差大时用正反馈 D. 在偏差值小时用负反馈3、在反馈控制系统中,设定值如果按照某一函数规律变化,则称为___________.A. 定值控制B. 程序控制C. 随动控制. 函数控制4、闭环系统的方框图中,若输入量是扰动信号,输出为被控量,则该环节是_________。
A。
调节单元B。
测量单元C。
执行机构D。
控制对象5、与闭环系统相比较,开环系统主要是没有。
A.执行机构B.反馈环节C.调节单元D.显示单元6、衡量控制系统准确性的指标是_______________。
A. 衰减率B. 振荡次数C。
最大动态偏差和静态偏差 D. 过渡过程时间7、控制系统的衰减率等于0。
8时的过渡过程是_____________。
A。
等幅振荡过程B. 非周期过程C。
衰减振荡过程 D. 发散振荡过程8、在反馈控制系统中,给定值为r,被控量为y,对无差控制系统,其超调量σp 为_________。
A。
σp =0 B。
σp =1 C。
σp 为余差D。
9、在定值控制系统中,符合动态过程品质要求的衰减率φ应是。
A.φ=0 B.φ=0.5~0.7C.φ=0.75~0.9 D.φ=110、在纯比例控制系统中,若调节器的比例带PB调得太大,控制系统的品质指标将会发生变化的是:。
A.静态偏差减小B.最大动态偏差C.衰减率增加D.振荡周期减小11、理想的定值控制系统过渡过程是.12、某温度调节器PB=20%,测量范围为20~100℃,输出电流为0~10mA,若温度为50℃,输出为8 mA,问温度为48℃时,输出为___________。
A. 2mAB. 4mAC。
5.5mA D。
9。
25mA图所示,则积分时间Ti应为_________。
轮机自动化复习题答案
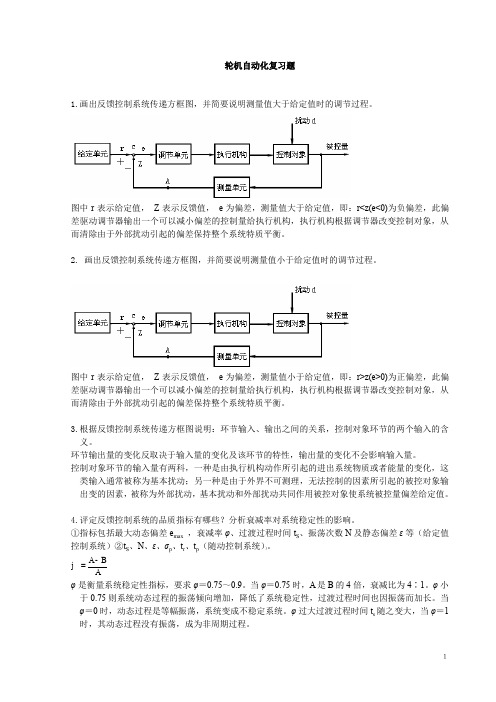
1轮机自动化复习题1.画出反馈控制系统传递方框图,并简要说明测量值大于给定值时的调节过程。
图中r 表示给定值, Z 表示反馈值, e 为偏差,测量值大于给定值,即:r<z(e<0)为负偏差,此偏差驱动调节器输出一个可以减小偏差的控制量给执行机构,执行机构根据调节器改变控制对象,从而清除由于外部扰动引起的偏差保持整个系统特质平衡。
2. 画出反馈控制系统传递方框图,并简要说明测量值小于给定值时的调节过程。
图中r 表示给定值, Z 表示反馈值, e 为偏差,测量值小于给定值,即:r>z(e>0)为正偏差,此偏差驱动调节器输出一个可以减小偏差的控制量给执行机构,执行机构根据调节器改变控制对象,从而清除由于外部扰动引起的偏差保持整个系统特质平衡。
3.根据反馈控制系统传递方框图说明:环节输入、输出之间的关系,控制对象环节的两个输入的含义。
环节输出量的变化反取决于输入量的变化及该环节的特性,输出量的变化不会影响输入量。
控制对象环节的输入量有两科,一种是由执行机构动作所引起的进出系统物质或者能量的变化,这类输入通常被称为基本扰动;另一种是由于外界不可测理,无法控制的因素所引起的被控对象输出变的因素,被称为外部扰动,基本扰动和外部扰动共同作用被控对象使系统被控量偏差给定值。
4.评定反馈控制系统的品质指标有哪些?分析衰减率对系统稳定性的影响。
①指标包括最大动态偏差e max ,衰减率φ、过渡过程时间t S 、振荡次数N 及静态偏差ε等(给定值控制系统)②t S 、N 、ε、σp 、t r 、t p (随动控制系统))。
A BAj -=φ是衡量系统稳定性指标,要求φ=0.75~0.9。
当φ=0.75时,A 是B 的4倍,衰减比为4∶1。
φ小于0.75则系统动态过程的振荡倾向增加,降低了系统稳定性,过渡过程时间也因振荡而加长。
当φ=0时,动态过程是等幅振荡,系统变成不稳定系统。
φ过大过渡过程时间t s 随之变大,当φ=1时,其动态过程没有振荡,成为非周期过程。
025-轮机自动化A答案及评分标准

……………………………………………………………………………………………..
一、选择题(每题1分,共30分)
二、名词解释(每题4分,共16分)
衰减率——第一个波峰值A减去第二个同向波峰值B除以第一个波峰值A,即 。
临界比例度——先将调节器变为纯比例调节器,然后再阶跃扰动作用下,从大到小改变比例度,制导系统产生等幅振荡,这时的比例度为临界比例度δk。
有应急指令时的起动
重复起动的第二和第三次起动
倒车起动
四、下图为主机缸套冷却水温度自动控制系统的原理图,冷却水温度控制采用WALTON型恒温阀,说明WALTON型恒温阀动作原理。(假定冷却水温度升高)(15分)
动作原理:冷却水温度升高时,石蜡体积增大,感温盒内的活塞下移,再经过活塞杆、连杆以及连杆与滑板之间的铰接点,使滑板绕轴逆时针转动一个角度,减少旁通水量,增加经过冷却器的水量,从而使冷却水温度降下来。随着感温盒内活塞的下移,弹簧被压缩,当感温盒中石蜡因体积膨胀所产生的向下作用力与弹簧所产生的向上张力相平衡时,滑板停止转动。
附加误差——仪表使用中由于外界条件的影响,如温度、湿度、振动等所引起的误差。
重起动——在应急起动、倒车起动或有重复起动的情况下,为了提高起动的成功率,遥控系统将自动增加起动供油量或者自动提高起动空气切换转速来进行起动的方式。
三、简答题(共23分)
1.轮机自动化的主要作用。(每条3分,共9分) 节省人力,改善劳动条件;
提高动力装置运转的可靠性和安全性;
提高动力装置运行的技术经济指标。
2.组合逻辑电路的分析包括那几个步骤?(每条1分,共5分)
通过实际的逻辑回路画出逻辑图
通过逻辑图写出逻辑函数表达式
出化简后的逻辑表达式所对应的逻辑图
轮机自动化基础答案

轮机自动化基础答案【篇一:03大管轮轮机自动化题库】1579、有一反馈控制系统,受到阶跃扰动后,被控量振荡2~3次就稳定在给定值上,这说明()。
(156663:第05章船舶反馈控制系统基础:2) 查看答案a.系统稳定性好b.系统稳定性差c.调节器控制太弱d.调节器控制作用太强1580、反馈控制系统处于临界状态的衰减率为()。
(156664:第05章船舶反馈控制系统基础:3) 查看答案a.1b.4c.2d.0b.(a-b)/a1583、在pid温度控制系统中,若系统衰减率偏小,错误的认识是()。
(156667:第05章船舶反馈控制系统基础:6) 查看答案a.积分时间整定值太小b.微分时间整定值太大c.比例带整定值太小d.比例带整定值太大1584、由比例调节器组成的定值控制系统受到扰动后,其控制过程衰减率随比例带增大而()。
(156668:第05章船舶反馈控制系统基础:7) 查看答案a.增大b.减小c.无影响d.波动变化1585、一般认为,能使输出信号波动()次即趋于稳定的比例带可近似地看作衰减率为?0.75时的比例带。
(156669:第05章船舶反馈控制系统基础:8) 查看答案a.1b.2c.3d.41586、控制系统的衰减率等于0.8时的过渡过程是()。
(156670:第05章船舶反馈控制系统基础:9) 查看答案a.等幅振荡过程b.非周期过程c.衰减振荡过程d.发散振荡过程1587、反馈控制系统在使用和管理过程中首先应注意的问题是()。
(156671:第05章船舶反馈控制系统基础:10) 查看答案a.准确性b.快速性c.稳定性d.动态特性1588、采用比例调节器的定值控制系统,当比例带减小时,对控制过程和结果的影响是()。
(156672:第05章船舶反馈控制系统基础:11) 查看答案a.衰减率减小b.静态偏差增大c.最大动态偏差增大d.振荡次数减少1589、控制系统受到阶跃扰动时,其输出的动态特征为下列()情况最好。
轮机自动化习题(选择版)

第一章自动控制基础知识一、选择题1 不可作为气动或电动控制系统标准信号的有__B____。
B.0.02~0.1Pa2 一个环节的输出量变化取决于____ A____。
A.输入量的变化3 在定值控制系统中为确保其精度,常采用___C_ ____。
C.闭环负反馈控制系统4 反馈控制系统中,若测量单元发生故障而无信号输出,这时被控量将___D____。
D.不能自动控制5 对于自动控制系统,最不利的扰动形式是___A_____。
A.阶跃输入6 在反馈控制系统中,调节单元根据_____B___的大小和方向,输出一个控制信号。
B.偏差7 按偏差控制运行参数的控制系统是_____B___系统。
B.负反馈8 一个控制系统比较理想的动态过程应该是___A_____。
A.衰减振荡9 在反馈控制系统中,为了达到消除静态偏差的目的,必须选用__B_____。
B. 负反馈10 在反馈控制系统中,执行机构的输入是____B____。
B. 调节器的输出信号11 反馈控制系统中,为使控制对象正常运行而要加以控制的工况参数是____B____。
B.被控量12 气动控制系统中,仪表之间的统一标准气压信号是___A_____A.0.02~0.1MPa13 在柴油机冷却水温度控制系统中,其控制对象是___C_____。
C.淡水冷却器14 对定值控制系统来说,其主要扰动是___C_____。
C.控制对象的负荷变化15 在燃油粘度控制系统中,其控制对象是____A____。
A.燃油加热器16 闭环系统的方框图中,输入量为偏差,输出为控制信号,则该环节是___A_____。
A.调节单元17 船舶柴油机燃油粘度控制系统是____A____。
A.定值控制系统 B.随动控动系统 C.程序控制系统 D.开环控制系统18 在以下系统中,属于开环控制系统的是___A_____。
A.主机遥控换向逻辑回路19 在反馈控制系统中,被控量是指_____D___。
轮机自动化答案
通常故瘴报警也叫长时故障报警,当参数越限发生故障时,红灯快闪,并发声响报警,轮机人员到集中控制室,确定报警的监视点后。按确认按钮则红灯常亮并消声,这时轮机人员要检修所出现的故障,故障消失后红灯由常亮转灭撤消报警指令。………4分
短时报警是指参数越限发生故障时红灯快闪,发声响报警,当轮机人员还未到集中控制室按确认按钮,故障已经消失,这时红灯慢闪,仍发声响报警,按确认按钮后,红灯由慢闪直接熄灭,并消除声响报警。……4分
(5)按加速速率限制的速度加速至程序 Nhomakorabea荷开始转速(一般为额定转速的70%);………1分
(6)以后加速除加速速率限制,还要经程序负荷限制使主机慢慢加速;………1分
(7)加速过程中还要受到增压空气压力、转矩及轮机长最大转速限制;………1分
3.在集中监视与报警系统中,有几种故障报警方式?简述它们的报警和复位过程。
(2)当转速下降到换向转速时输出换向信号把凸轮轴从倒车位换到正车位,换向完成后,由于车令与转向不一致,仍然停油继续降速;………2分
(3)当转速降速到低于发火转速时,打开主起动阀开始进行强制制动;………2分
(4)当强制制动到转速为零时开始进行正车起动,并解除油门零位联锁,供起动油量,起动成功后在起动油量下稳定运行几秒钟;………1分
(2)装有电机热保护继电器,防止电机因短路、过载使电流过大而烧坏;………3分
(3)在“减少输出继电器”和“增加输出继电器”的通电回路中各串联一个对方的常闭触头,互相连锁,防止两个继电器同时通电。………3分
2.在主机遥控系统中,把车钟手柄从全速倒车扳到全速正车,简述主机运行状态的变化过程。
答:(1)由于车令与凸轮轴位置不一致,车令与转向不一致,输出停油信号,经伺服器把油门推向零位,停油降速;………2分
轮机自动化复习有答案版

1、在采用耗气型气动功率放大器时,若它能把压力信号放大10 倍,则喷嘴-挡板机构输出的压力变化围是:A、0.008MPaB、0.02MPaC、0.08MPaD、0.06MPa2、气动功率放大器是以____平衡原理工作的。
A、线位移B、力C、力矩D、角位移3、某温度变送器铭牌上标明量程为0-100℃,最大绝对误差为士1.5℃,则该温度变送器的精度为:A、3 级B、2 级C、1 级D、1.5 级4、JS-II型多回路时间继电器的标度盘复位条件是:A、继电器线圈通电B、离台器啮合C、继电器线圈断电D、收紧复位弹簧5、柴油机货船辅锅炉燃烧自动控制的方式常采用:A、微分控制B、双位控制C、积分控制D、连续控制6、在NAKAKITA型燃油粘度控制系统中,控制选择阀的作用是A、输出柴油-重油转换信号B、输出温度控制信号C、输出粘度控制信号D、输出温度和粘度控制信号的信号7、在NAKAKHA型燃油粘度控制系统中,温度调节器和粘度调节器分别采用A、正作用式、反作用式B、正作用式,正作用式C、反作用式,反作用式D、反作用式,正作用式8、在NAKAKITA型燃油粘度控制系统中,若顺时针转动粘度调节器给定值旋钮,则红色给定指针朝读数方向转动,挡板喷嘴。
A、增大,靠近B、增大,离开C、减小、靠近D、减小,离开9、在NAKAKITA型燃油粘度控制系统中进行开环测试时,若突然顺时针转动给定位旋钮,其调节器输出的规律为:10、在NAKAKITA型燃油粘度调节器中,若三通话塞阀卡在上位,系统投人工作后,会出现A、系统不能工作B、对柴油进行中间温度定值控制,发报警C、对重油进行中间温度定值控制,发报警D、对柴油进行上限温度定值控制,发报警11、在NAKAKITA型燃油粘度调节器中,系统投入运行后,从柴油切换到重油的时刻为A、把转换开关从“D”位转到“H”位时B、油温达到中间温度时C、油温达到上限温度时D、从温度控制转为粘度控制时12、在电极式锅炉水位控制系统中,给水泵电机起动时刻为A、水位在上限水位B、水位下降到中间水位C、水位下降到下限水位D、水位上升到中间水位13、在电极式锅炉水位控制系统中、若检测高水位的1号电极结满水垢,其故障现象为A、水位在高水位振荡B、水位在下限水位振荡C、锅炉满水D、锅炉失水14、在采用压力比例调节器和电动比例操作器的辅锅炉蒸汽压力控制系统中,为增大比例作用强度,应A、把测量电位器向垂直方向转动B把测量电位器向水平方向转动C、把反馈电仪器向垂直方向转动D、把反馈电位器向水平方向转动15、在大型油船辅调炉水位控制系统中,双冲量是指A、水位,给水压差B、水位,蒸汽流量C、水位,给水流量D、给水流量,蒸汽流量16、在货船辅锅炉的燃烧控制系统中,采用双位控制的目的是A、实现蒸汽压力的定值控制B、控制系统简单可靠C、能实现良好的风油比D、保证点火成功17、在货船辅锅炉燃烧时序控制系统中,到顶扫风时间后的第一个动作是A、关小风门B、点火变压器通电C、打开燃油电磁阀D、接通火焰感受器电源18、在FOPX型分油机系统中,如果净油中的水分越大,则水分传感器的电容器流过的电流_____。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2. Consider the system shown in Figure 1, w= here A1
0 −4 = 1 16 , B1
2 1 ,
= C1
[= 2 5],G2 (s)
(s −2(1s)(2s−−22s)+(= s2+) 5) ,G3(s)
3 . Obtain the closed-loop (s −1)2
G2 (s)
+
=xy
=
A1x C1x
+
B1u
+
+
G3 ( s)
Figure 1
3. Consider the unity-feedback (单位反馈) system shown in Figure 2. Plot the root loci (根轨迹) of the system with MATLAB, find the range of the gain K required for stability, and plot unit-ramp (单位斜坡) response
save the file name as A1.mdl. Simulate the system with “sim” command,
plot the unit-step response curve, and obtain the settling time (过渡过程
时间, ±2%). (Simulation time is set to 10s)
1. The elements of Fibonacci array (斐波那契数列) meet the following
rules:
ak +2
= ak +
ak +1 (k
= 1, 2, )
(
a=1
a=2
1 ), find the first element that is
greater than 1000 and its sequence number k.
注意:考试前先按以下要求创建各自的考试文档,在 D 盘根目录下创建一个文 件夹,命名成:学号_姓名,例如:201610230001_张三,注意学号在前,姓名 在后,中间用下划线隔开,考试中所编写的所有程序均放在该文件夹下,每个 程序 m 文件以姓名拼音的首个字母命名,例如:zs1 表示张三的第一道题,务 必按要求对文件夹和程序文件进行命名!
transfer function (闭环传递函数) with MATLAB, and analyze the stability
(稳定性) of the system. If the system is stable, plot the unit-step (单位阶跃)
response curve and compute the maximum overshoot (超调量).
r
2
10
y
s(s + 2)
1 s
Figure 3
curves of the closed-loop system for three different values of K = {2,10, 20}.
K s(s2 + 4s + 5)
ห้องสมุดไป่ตู้
Figure 2
4. Built a system block diagram shown in Figure 3 with SIMULINK and